一种针对组网雷达的欺骗压制复合干扰方法
2019-03-19罗震明晏洪勇刘泽燊
袁 天,罗震明,晏洪勇,刘泽燊
(解放军75832部队,广东 广州 510515)
0 引 言
组网雷达系统相比于单雷达系统具有预警时间更短、探测空域更广、精度更高、目标信息量更多等优势[1-2],在复杂的电子对抗环境中得到了广泛应用,对突防作战造成了严重威胁。针对组网雷达带来的诸多威胁,研究人员提出了单部干扰机实施多假目标航迹欺骗的干扰技术[3],以及控制飞行器编队实施的协同欺骗干扰技术[4],但这些方法仍然存在技术实现难度大、平台易暴露等问题。
针对这些问题,本文提出欺骗压制复合干扰方法,阐述了干扰原理,给出了分布式压制干扰的数学模型,分析了主瓣航迹欺骗干扰中关键的参数调制方法,最后进行了仿真实验,结果表明该方法可以有效对抗组网雷达。
1 复合干扰原理
欺骗压制复合干扰主要是针对网内某一雷达使用隐身干扰机携载平台对其进行主瓣航迹欺骗干扰,针对能够侦测到虚假目标位置和干扰平台的其余雷达采用分布式小型干扰机进行较大范围内的噪声压制干扰,保证虚假目标和干扰平台不被网内其余雷达侦测到。下面以3部雷达组网为例对其原理进行说明,其干扰态势如图1所示。
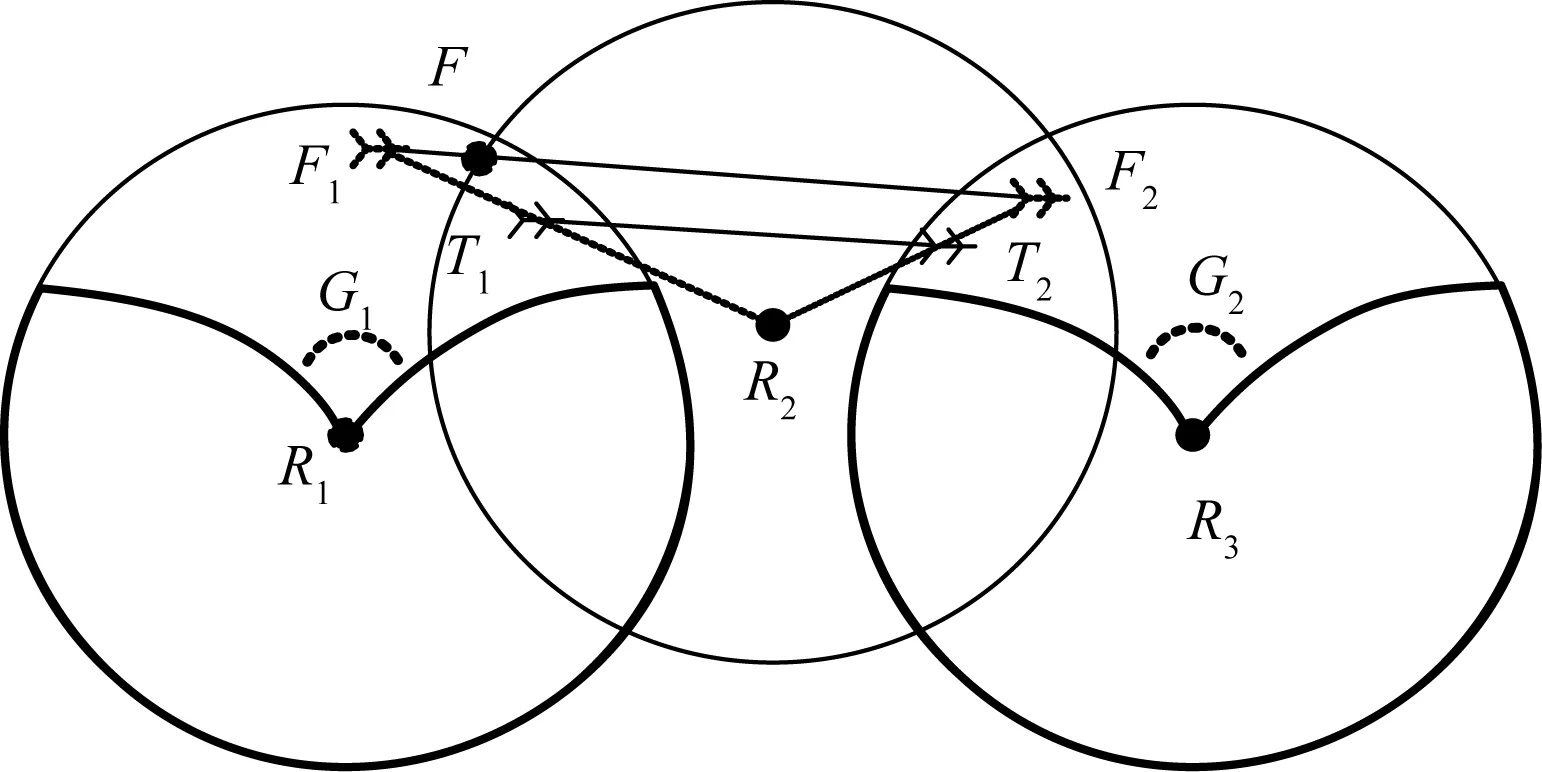
图1 干扰态势
观察图1,雷达采用探测区域两两相互重叠的方式布站。首先使用小型分布式干扰机群对R1、R32部雷达进行压制干扰,使其探测范围压缩到图中粗实线区域内。对雷达R2实施主瓣航迹欺骗干扰,干扰机平台和虚假目标均位于其余2部雷达探测范围之外将不会被其探测到,干扰机沿T1T2航线飞行并发射干扰信号,由于F1位于雷达R2探测范围之外,因此实际形成的虚假目标航迹为FF2。
2 分布式压制干扰
在此使用分布式压制干扰,将网内部分雷达的探测区域进行压缩。根据文献[5]可以得出分布式干扰下对雷达的最大压制距离(自卫距离)为:
(1)
式中:Kj为雷达信息处理设备输入端干信比(即干扰压制系数);σ为雷达反射截面积;Rj为干扰机到雷达的距离;γj为干扰信号对雷达天线的极化损失;Pt、Gt为雷达等效辐射功率;Gr为雷达天线接收目标回波信号的增益;Pj、Gj为干扰等效辐射功率;N为干扰机个数;Gr(θi)为雷达天线接收干扰信号的增益;Lj为干扰信号的极化损失和机内传输损耗;Bj为干扰信号带宽;Ls为目标回波信号在雷达内的传输损耗;Bs为雷达中放带宽。
设雷达的半功率波束宽度为θ0.5=3°,根据文献[6],则Gr(θi)计算如下:
(2)
观察雷达自卫距离计算公式可以发现,当干扰机空间位置固定时,随着雷达主波束的移动,雷达自卫距离将会变化,将雷达在不同方向时最大探测距离连接起来就是分布式干扰下雷达的暴露区也即是有效区域。
3 主瓣航迹欺骗干扰
要成功实施主瓣航迹欺骗干扰,最主要的就是在适当的时机施放带有相应干扰参数调制的干扰信号,因此干扰参数的调制是主瓣航迹欺骗干扰能否成功有效的关键[7]。以常用的线性调频(LFM)信号为例,假定雷达发射信号为:
(3)
则调制之后的干扰信号可表示为:
J(t)=krect(t-Δt)·exp[j2π((f0+fd)(t-Δt)+
(4)
式中:k、Δt、fd分别表示对接收到的雷达信号的幅度、时延和多普勒频率的调制。
3.1 幅度调制分析
假设干扰机模拟的假目标到雷达的距离为Rf,RCS为σ,根据侦察方程,干扰机截获的雷达信号功率为:
(5)
将干扰信号转发给雷达,则雷达接收到的干扰信号功率为:
(6)
式中:K=k2,为干扰信号调制结果。
所要模拟的假目标回波功率应为:
(7)
式(7)与式(6)应当相等,则有:
(8)
因此得到幅度调制参数为:
(9)
3.2 时延调制分析
假设干扰机与雷达之间的距离为Rj,假目标与雷达之间的距离则为Rf,雷达的脉冲重复周期为TP,且在此假设假目标位于干扰机与雷达连线的延长线上,则时延Δt可以表示为:
Δt=2(Rf-Rj)/c,Rf>Rj
(10)
雷达、干扰机和假目标的空间关系如图2所示。
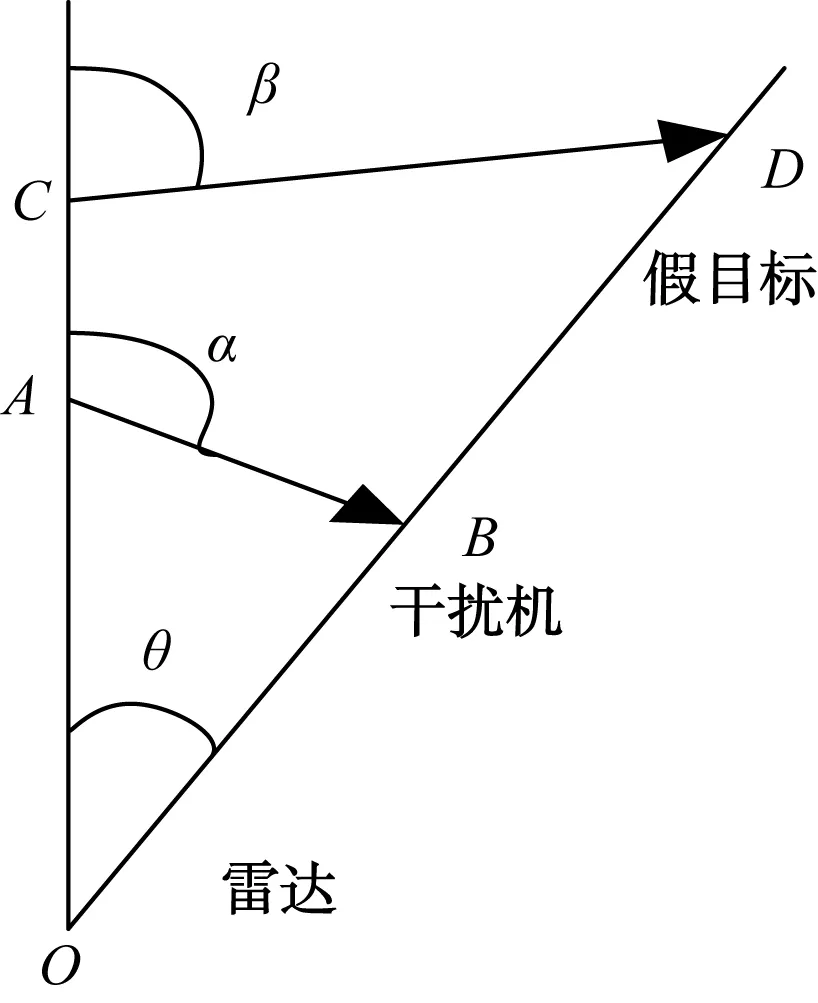
图2 空间关系
图2中,A和C表示当前干扰机和假目标位置,B和D表示下一次干扰机和假目标的位置,在此设定OA=Rj0,OC=Rf0,OB=Rj1,OD=Rf1,CD=d,∠AOB=∠COD=θ。
(11)
由前文分析可知,在整个过程中首先得到的是假目标点迹的参数和当前时刻的干扰机位置,即Rj0、Rf0、Rf1和d是已知的,需要求解的就是下一次干扰时干扰机位置,即Rj1。
在ΔCOD中,已知OC、OD和CD,通过余弦定理可以求得θ为:
(12)
在ΔAOB中,已知OA、θ,在此假设α已知,则有∠OAB=π-α,通过正弦定理可以求得OB及Rj1为:
(13)
因此干扰信号的时间延迟为:
(14)
3.3 多普勒调制分析
在干扰过程中2次干扰的时间间隔设为Δt0,在此为方便计算,假定其在干扰点处的速度为其在这段时间内匀速运动的速度,因此可以求出假目标和干扰机的运动速度为:
(15)
(16)
因此干扰信号的多普勒频率为:
(17)
在进行多普勒调制时,应将自身多普勒效应的影响抵消[8],因此有:
(18)

α=αmin+rand*(αmax-αmin)
(19)
式中:rand函数表示取0到1之间的随机数;αmax为航向角最大值;αmin为航向角最小值。
3.4 干扰实施过程
根据前文的分析推导,设计主瓣航迹欺骗干扰过程如图3所示,具体实施步骤如下:
(1) 干扰侦察。获得敌方雷达的位置、发射信号形式、波束信号强度和驻留时间等先验信息。
(2) 虚假航迹设定。根据运动学特征参数限制设计符合敌方雷达一般航迹关联准则的虚假航迹,得出虚假航迹、点迹的各项参数。
(3) 参数推导装订。在对干扰机自身状态进行初始化测量的基础上,依据前面提出的干扰信号调制方法推导干扰机运动参数并进行装订。
(4) 干扰具体实施。首先判定是否为首次干扰,若是,则使用步骤(3)的初始参数实施首次干扰,而后递推计算下次干扰参数;若不是,则使用递推参数释放干扰,直至干扰结束。
(5) 干扰结束。一是由我方下达干扰结束指令,二是干扰机连续多个雷达工作周期未截获雷达波束。
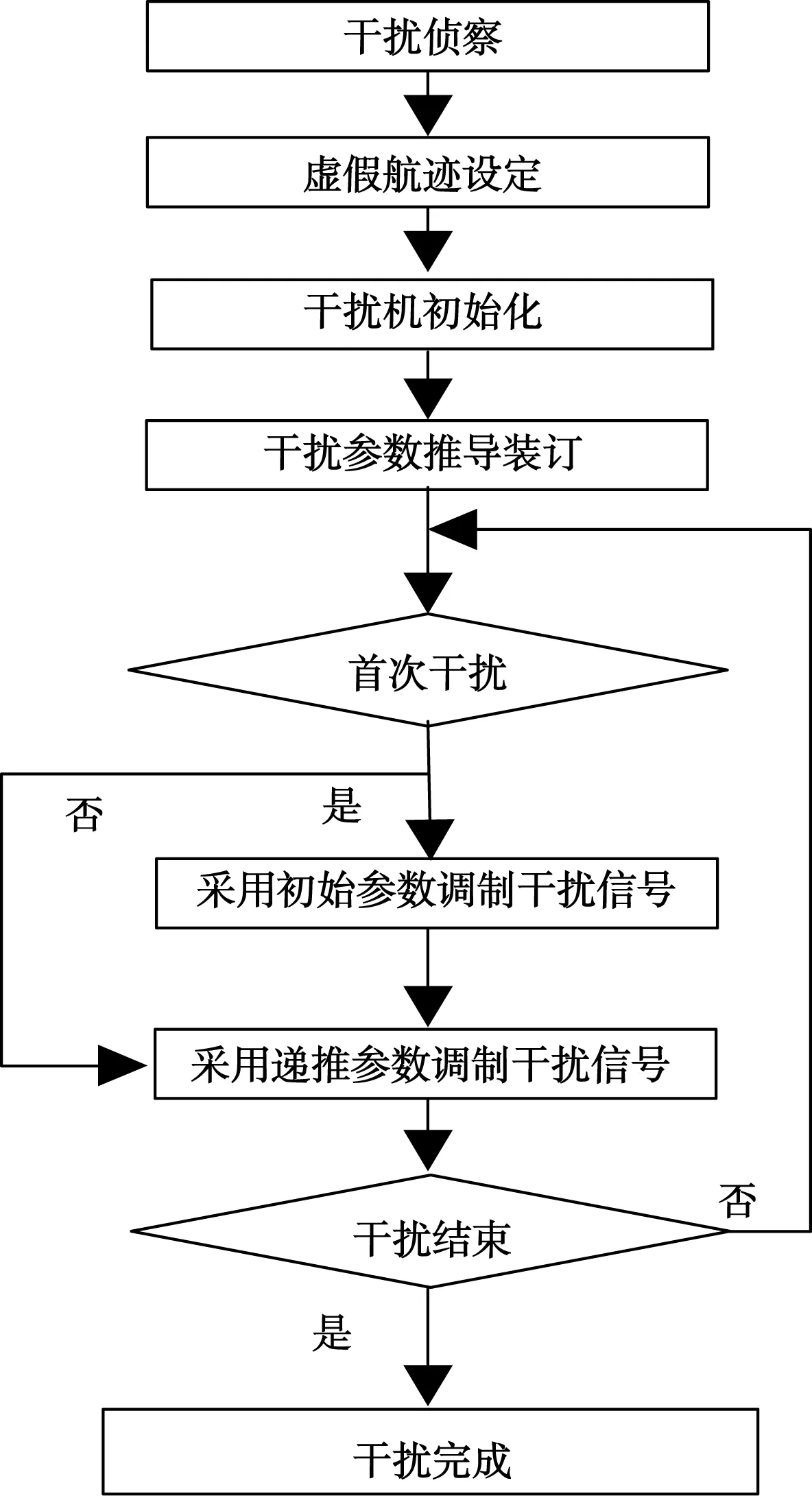
图3 干扰实施流程
4 仿真实验验证
在此分别对分布式压制干扰和主瓣欺骗干扰进行仿真分析。
4.1 分布式干扰仿真
雷达及干扰机参数如下:Pt=150 kW,Pj=5 W,Gt=Gr=30 dB,σ=5 m2,γj=1 dB,Gj=1 dB,Kj=10 dB,Bj=200 MHz,Bs=60 MHz,Lj/Ls=-10 dB。
选取9部相同初始条件的干扰机,与雷达距离均为Rj=40 km,按等间距分布,中心位置位于0°方向。干扰机之间的分布间隔以半功率波束宽度3°为准,仿真结果如图4所示,局部放大如图5。

图4 分布式压制干扰效果
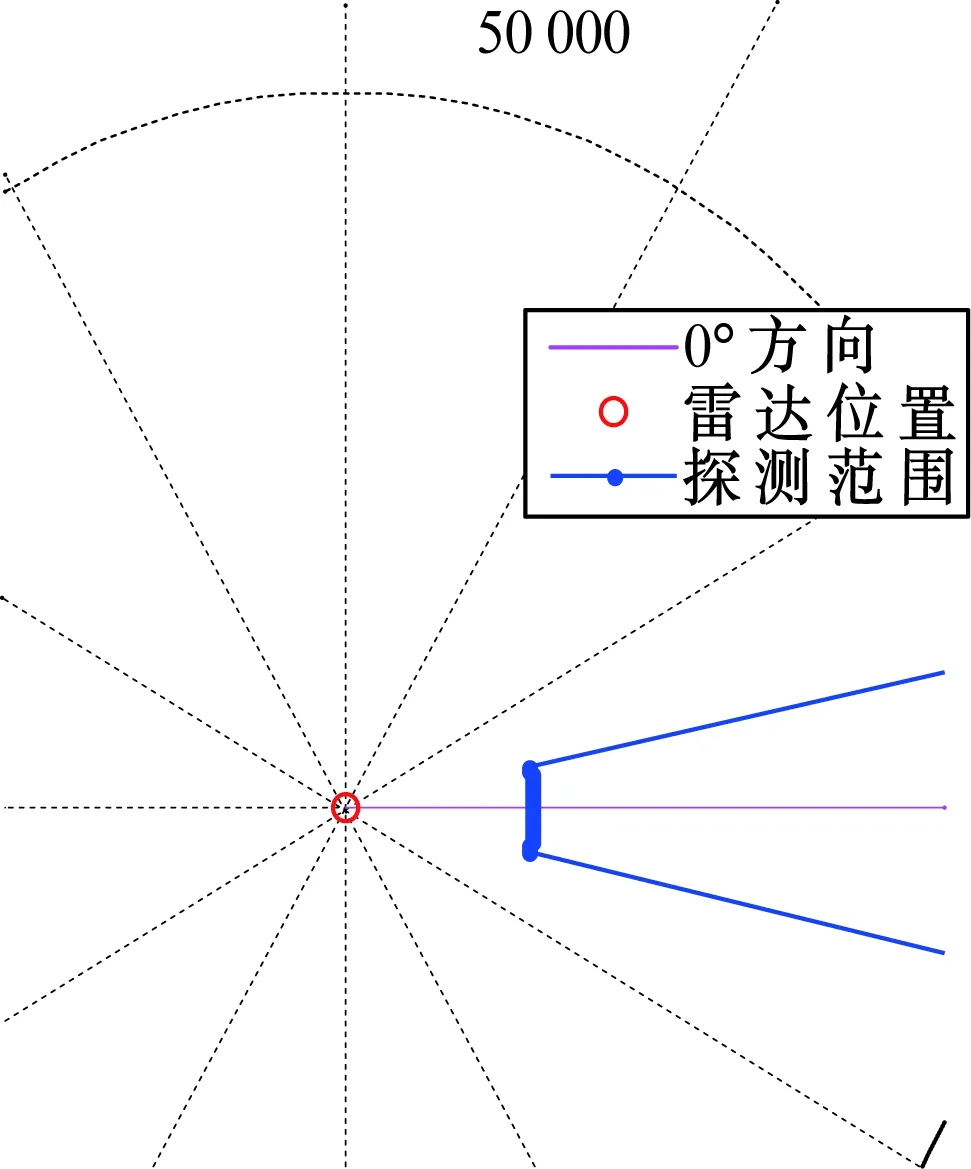
图5 干扰效果局部放大
观察图4和图5可以发现,通过多部小型干扰机共同对雷达实施压制干扰可以使雷达的探测范围大幅度下降,在雷达主瓣波束对准分布式干扰机群时将出现“楔形缺口”盲区,在这个盲区中,雷达被干扰信号所压制,探测范围急剧下降,不能有效地检测到运动目标,在一定角度范围内均有较强的压制效果。
4.2 主瓣欺骗干扰仿真
在此设定虚假目标做匀变速运动,以虚假航迹起始位置为原点建立三维直角坐标系,取雷达位置为(-50 000,50 000,0),虚假航迹起始点相对于雷达的方位角为315°,干扰机初始位置距离雷达60 km,其初始方位角同样为315°。设定虚假目标做匀变速运动,其初始位置为(0,0,0),X、Y、Z方向初始速度均为100 m/s,其加速度情况如表1所示。

表1 虚假航迹加速度
而后根据参数调制方法进行参数计算,按照时间顺序施放干扰信号。干扰信号通过雷达处理后在PPI显示器上的假目标及干扰机航迹如图6所示。

图6 假目标及干扰机航迹
根据前文提出的主瓣航迹欺骗干扰实施方法得出的干扰机航迹及运动参数是行之有效的,干扰机按照相应的运动参数进行机动,同时发射经过调制的干扰信号,被雷达接收之后将被雷达关联波门关联,最终能在显示器上形成连续假目标航迹。
综上所述,通过分布式干扰机实施压制干扰使
网内部分雷达探测范围大幅度压缩,而后利用欺骗式干扰机对网内重要雷达如制导雷达实施主瓣航迹欺骗干扰,这在实际电子对抗中是可以实现的,因此欺骗与压制2种干扰样式组成的复合干扰是有效的,具有实际可行性。
5 结束语
本文针对组网雷达对抗问题,提出了欺骗压制复合干扰方法,对其原理进行了阐述,通过一系列数据处理和分析,得出了主瓣欺骗和分布式干扰合一的复合干扰实施方法。与前人结果相比,其主要优势在于主瓣欺骗干扰分析更加深入,对具体参数调制方法进行推导,整体实施方法更加详细,并与分布式干扰紧密结合。最后进行仿真实验,证明此类复合干扰方法实际可行,对于雷达对抗理论发展和实际应用具有一定的参考意义。