基于模糊控制的永磁直驱风力发电机最大功率跟踪控制
2019-02-27刘世林樊国东
裴 俊, 刘世林, 樊国东
(高端装备先进感知与智能控制教育部重点实验室(安徽工程大学), 安徽 芜湖 241000)
引 言
新能源发电技术已逐渐成为各国研究的焦点。风能作为一种绿色且可再生的能源受到广泛重视,且正逐步成为全世界新能源利用的主要形式之一[1-2]。直驱式永磁同步发电机(direct drive permanent magnet synchronous generator,D-PMSG)的风机和电机直接相连省去了中间齿轮箱,相较于双馈风力发电机,可以节约一定的运行和维修成本。而D-PMSG风电系统大多采用加入AC/DC整流器的简单结构,仅具备一般的放电和启停控制功能,较少涉及最大功率追踪(maximum power point tracking,MPPT)控制,从而会导致风能转化率较低。因此,开展关于D-PMSG的MPPT控制技术研究具有重要意义[3-5]。
目前,在风力发电系统中MPPT主要有两大类方法。一类是最佳风力机特性曲线法,如最佳叶尖速比法、最优转矩曲线法及最佳功率曲线法[6]。最优曲线法的必要条件是需获得风机的具体参数,因此还需要增加测风环节,但是在实际中风速的检测会存在误差,导致此类控制方法实用性不高[7]。文献[8-10]建立了风速估计模型,在此基础上提出一种相适应的MPPT复合控制方法,一定程度上解决了风速测量存在误差的问题。文献[11]设计了在额定风速上下两种情况的电机控制系统,在风速较低和较高时分别采用双闭环和模糊PI控制系统,使风电机组可以在最大功率点(maximum power point,MPP)稳定运行。另一类是寻优法,即爬山搜索算法,典型代表是固定步长爬山搜索算法和变步长爬山搜索算法[12]。由于爬山法不需要知道风机详细的参数和实时风速,所以不需要多余的测风装置,降低了机组成本,但缺点是不能迅速跟踪到MPP处,并且会在接近MPP时波动较大[13]。文献[14]在PMSG矢量调控技术的基础上,优化了传统的变步长MPPT控制策略,解决了在风速发生突变时跟踪速度和系统稳态之间相矛盾的问题。文献[15]提出了一种新型梯度式变步长爬山搜索算法,一定程度降低了系统在MPPT时波动。文献[16]在传统爬山法的基础上引入了一种停止机制,该控制策略基本解决了风速突发扰动对搜索方向造成干扰的问题,稳定了系统在MPP的运行。上述一系列文献所提控制策略虽然减小了风速突变对永磁直驱风力发电机MPPT的影响,但是大多数都忽视了机组运行状态接近MPP时仍存在较大波动的情况。
本文基于传统MPPT原理和模糊控制理论,提出了一种基于模糊控制的D-PMSG的MPPT控制策略,并在Matlab/Simulink仿真软件中搭建了完整的D-PMSG的模型,与传统固定步长和变步长爬山法仿真结果进行对比,证明了该控制策略的有效性和优越性。
1 系统结构原理和建模
1.1 系统结构
本文使用的D-PMSG的结构如图1所示,风力机与电机转子直接耦合,机侧采用三相不可控二极管整流桥式电路加上BOOST升压电路,网侧采用了PWM逆变电路。首先三相不可控二极管整流桥将发电机定子的输出电流进行整流,然后利用DC/AC将电压稳定控制,最后利用网侧的逆变器逆变后馈入电网。
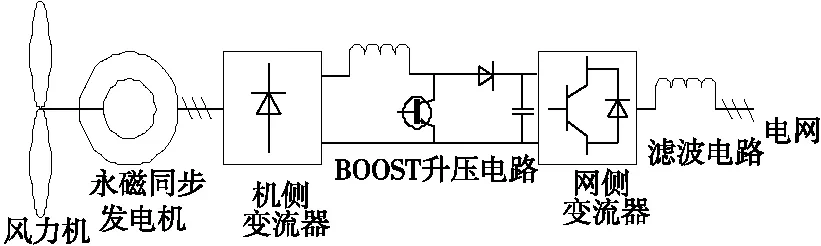
图1 D-PMSG风电系统结构图
1.2 风力机特性
风力机是D-PMSG中不可或缺的装置,其基本的工作原理是:利用风轮叶片将风能捕获,并随即将其转化为机械能,然后以转矩的形式输入到发电机中[17]。风力机的输出功率Pw可表示为:
(1)
其中:
(2)
(3)
(4)
式中:ρ为空气密度(kg/m3);v为风速(m/s);R为风轮半径(m);Cp为风能利用系数;λ为叶尖速比;λi为中间变量;ω为风力机的电角速度(rad/s);β为桨距角。
2 基于BOOST电路实现最大功率追踪原理
根据上述风机的原理和工作特性可知,当桨距角为一定值时,在某一风速下,D-PMSG的风能利用系数和输出功率都只与电机转速有关。根据公式中的单调趋向关系可知,此时肯定会存在某一电机转速使得风力机输出功率和风能利用系数达到最大。由于D-PMSG的风力机与电机的转子直接用机械轴连接,即两者的转速相等,所以某一风速下,只需要控制D-PMSG的转速,就可以让系统在MPP处运行。当风速发生突变扰动时,通过控制系统来保持电机转速的同步来实现系统的MPPT。电机转速关系与系统输出功率如图2所示。
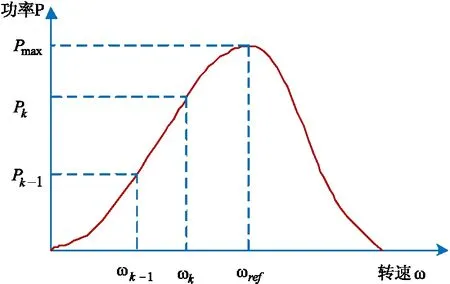
图2 某一风速下电机转速关系与系统输出功率曲线
包含BOOST升压电路的离网型D-PMSG系统等效电路图如图3所示。
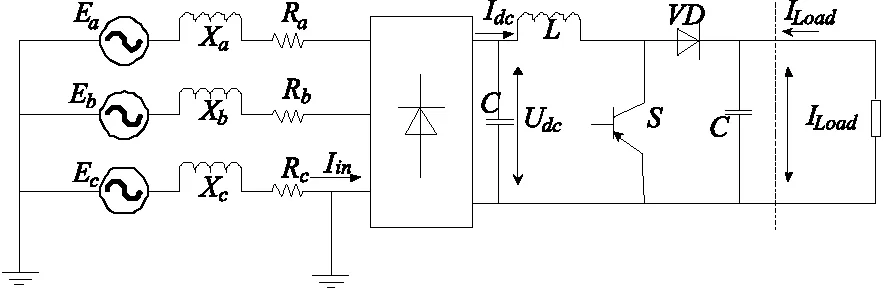
图3 离网型D-PMSG系统等效电路图
根据BOOST升压电路的基本结构和原理知识可知,其输入和输出电压之间的关系可以表示为:
(5)
根据DC-DC变换前后的功率守恒定律可以得到,输出电流Idc和负载电流ILoad之间存在关系如下:
ILoad=(1-D)Idc
(6)
由式(5)和式(6)可知:
(7)
假设发电机定子的输出线电压为VL,则Udc可以表示为:
(8)
如果不计整个风电系统中变换器件的功率损耗,则整流环节前后的功率相等,可以表示为:
(9)
由式(8)和式(9)两式可以得到:
(10)
由式(8)和式(10)两式可以得到:
(11)
将式(11)带入式(7)可以得到:
(12)
根据式(7)和式(12)两式可以得出以下结论:利用改变占空比D的值来改变基于D-PMSG的风电机组等效负载值,即改变了机组的负载输出特性,根据MPPT调节方式中直接功率控制原理可知,当负载输出特性和D-PMSG的输出特性相匹配时,发电机组就可以在MPP处稳定运行。根据贝茨极限定理和上述推理可知,在某一确定风速下,二者都存在一个占空比D使风电机组运行在MPP上。
3 模糊控制器的设计
如前所述,风电系统中风速的变化会影响输出功率,且风速的变化会受到很多不明确的因素影响。因此,在本文中提出了一种基于模糊控制的D-PMSG系统MPPT控制策略,其中利用模糊控制实现D-PMSG的MPPT的结构框图如图4所示。
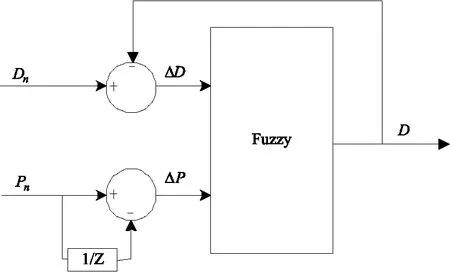
图4 风电系统MPPT中模糊控制结构图
3.1 输入输出量的模糊集合及论域
基于前面的分析可知,通过改变BOOST升压电路的占空比D的值可以控制风电系统的输出功率,因此可以选择BOOST电路的本周期和上个周期占空比的差值、本周期输出功率的差值作为模糊控制的输入信号量,并将其模糊化处理,然后经过模糊规则库进行逻辑推理后可以得出下个周期的所需改变占空比的大小和方向。将输入量进行量化并映射到模糊集合域Ep、ED、ED1。它们分别对应的等级集合为:
Ep={NB,NM,NS,ZE,NS,NM,NB}
ED=ED1={NB,NM,NS,NS,NM,NB}
其中:NB为负大,NS为负小,ZE为零,PS为正小,PB为正大。
3.2 隶属度函数
根据前文提到的系统输出功率和占空比之间的关系大致是一个类似抛物线的曲线,所以在本文中可以选择三角形状的隶属函数trimf,所得具体隶属度函数如图5~图7所示。
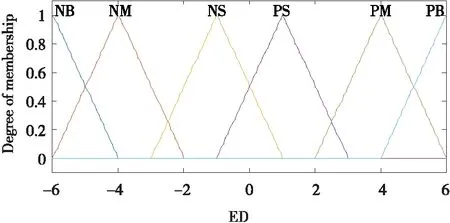
图5 BOOST电路占空比变化量
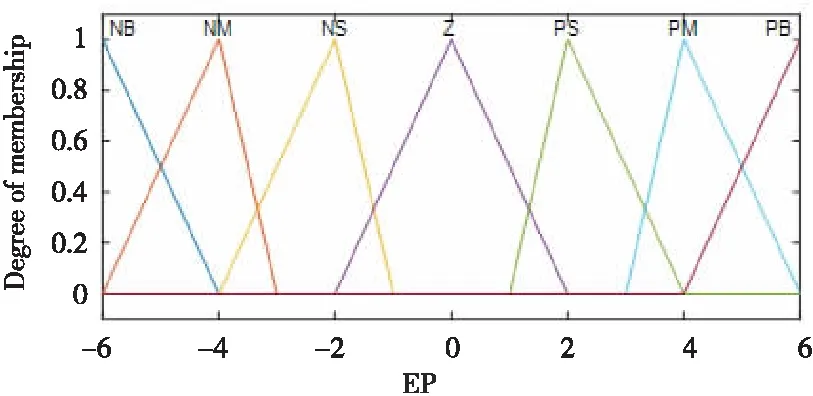
图6 风电系统功率变化量
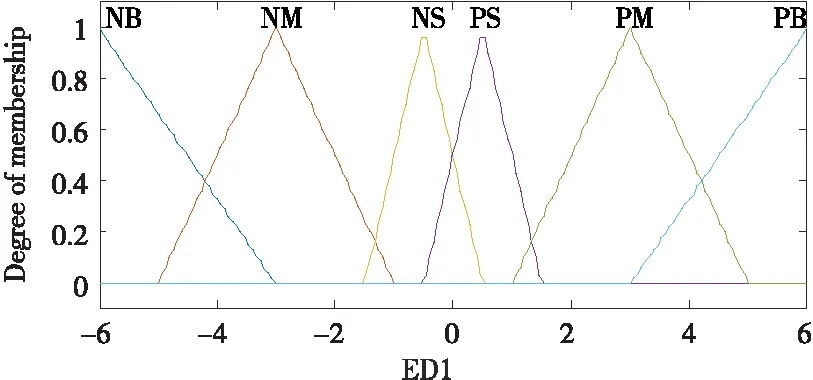
图7 模糊控制系统输出占空比
3.3 模糊规则
根据本文中对D-PMSG的MPPT控制效果要求,当系统输出功率减小了,则应该调整原来的扰动方向,如果系统输出功率增加了,则应该按照原来的步长来稍许继续增加。当距离系统MPP较远时,应该使用较大的步长进行跟踪,当距离MPP较近时,则应该使用较小的步长进行跟踪。通过以上约束可以分析得出控制规则,见表1。
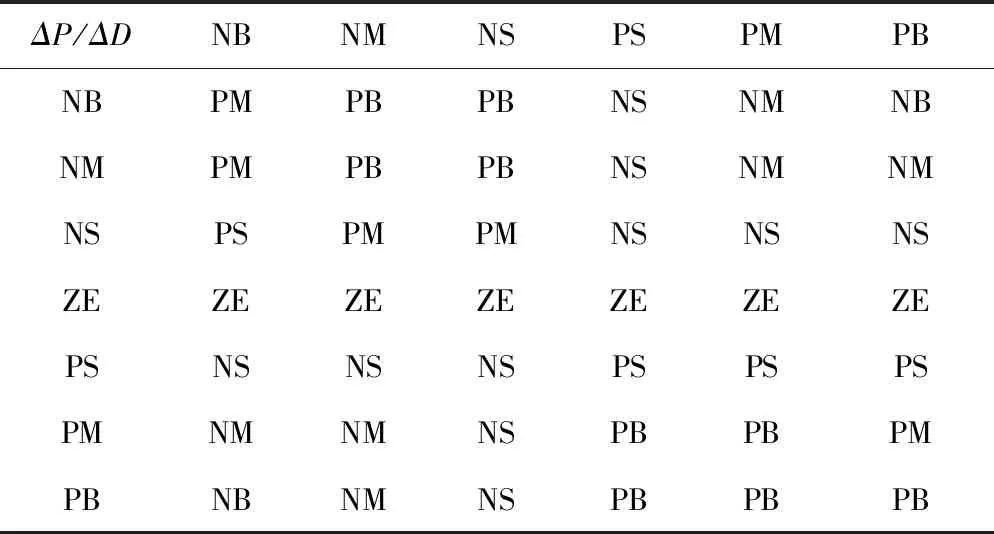
表1 模糊规则
3.4 去模糊化
为获取更准确的控制量,输出隶属度函数的计算结果需要能够很好地表达,则需要经过去模糊化处理。本文选取的方法为重心法,其公式为:
式中:A(u)为论域U上F集合A的隶属度函数。
4 仿真结果及分析验证
本文的仿真参数如下:空气密度ρ=1.225kg/m3,风轮半径R=4 m,风电机的桨距角β=0o,PMSG参数为:定子相电阻Rs=0.05 Ω,定子绕组电感L=3.95×10-4H,转动惯量J=0.192 kg·m2,极对数36,本文中风电机组不计摩擦系数,输入的阶跃风速为12 m/s~15 m/s,BOOST电路负载R=15 Ω,设定仿真时间为2 s。利用Matlab/Simulink仿真软件搭建D-PMSG系统MPPT的整体模型。仿真所得结果如图8~图11所示。
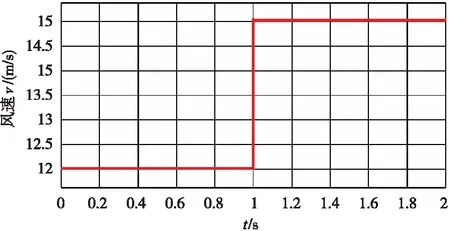
图8 阶跃风速变化示意图
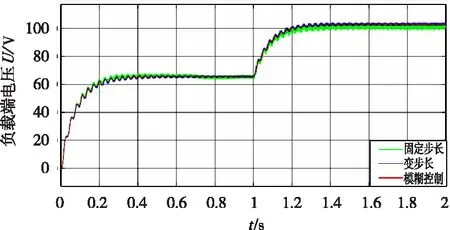
图9 负载端电压对比图
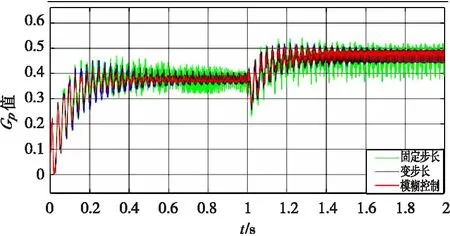
图10 Cp值对比图
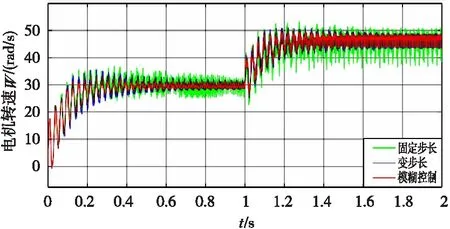
图11 电机转速对比图
通过上述仿真分析可以明显看出,这三种方法都可以实现PMSG风电系统的MPPT,但是固定步长算法由于步长的一成不变,所以在整个2 s内的追踪过程和在1 s时风速由12 m/s突变成15 m/s时波动都非常明显。变步长爬山算法因为会根据追踪的情况来改变步长,所以在0.4 s、1.4 s和1 s风速变化时都一定程度上减小了波动,但是在追踪到MPP之前负载端电压和电机转速还是存在波动。基于模糊控制的MPPT因为通过使用模糊推理得到的自适应步长,与设定的变化步长相比,很明显自适应步长更具有优势,所以不但能和爬山法几乎同时追踪到MPP,且其电机转速和负载端电压的波动在0.4 s、1 s、1.4 s相比于变步长爬山法都明显变小。综上所述,所得仿真结果证明了本文提出的基于模糊控制的MPPT的有效性,且相较于固定步长和变步长算法更有优越性。
5 结束语
本文经过对D-PMSG的原理和结构的分析,阐述了基于BOOST电路达到MPPT的原理,提出了一种基于模糊控制的D-PMSG的MPPT控制策略,结合MPPT与模糊控制原理设计了D-PMSG的MPPT模糊控制器。搭建了Matlab/Simulink仿真模型,对比分析仿真结果验证了所提控制策略的有效性和优越性。