排屑机防堵转保护装置的设计与实现∗∗
2019-02-27关集俱
王 勇 关集俱 赵 敏
(①苏州工业职业技术学院精密制造工程系,江苏苏州215104;②纽威数控装备(苏州)有限公司设计部,江苏苏州215129)
排屑机在数控机床上的应用非常广泛,它的主要作用是将机床加工的废料输送出去,提高自动化程度,减小工人的劳动强度。但排屑机在遇到料多或体积较大的废料时,传送装置常会被卡住,由于排屑机是靠电动机带动的,遇到这种情况电动机会过载烧坏。目前多采用热继电器来对电动机进行过载保护,但是热继电器保护有一段反应时间,当通过的电流大于额定电流时,反应的时间约1~2 min,在这个时间段内可能会导致电动机烧坏或部分机械部件损坏。针对此问题,我们设计了一种排屑机的防堵转保护装置,从机械和电气方面对电动机和排屑机机械部件双重防堵转保护,一旦排屑机卡住,防堵转机械保护装置使电动机驱动的机械部分依然可以转动,使其处于打滑状态,避免了电动机过载而造成损坏,同时也防止排屑机的零部件由于被迫受力而造成损坏。本装置还可以调整排屑的力矩,提升了防堵转保护装置的应用范围。
1 机械保护装置设计
1.1 可调摩擦片式机械保护装置
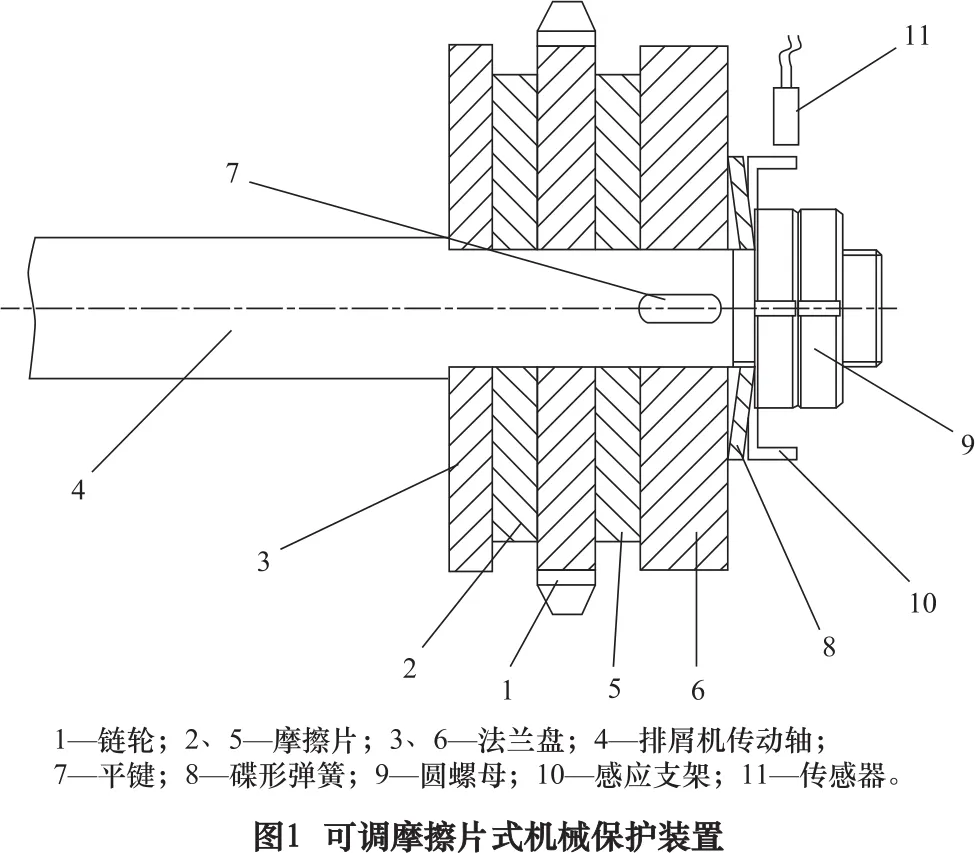
可调摩擦片式机械保护装置结构示意图如图1所示,包括机械保护部件和电气保护部件。机械保护部件包括链轮1、摩擦片2和5、法兰盘3和6、传动轴4、碟形弹簧8和圆螺母9;电气保护部件包括感应支架10和传感器11。
工作时,卷屑电动机通过链条带动链轮1转动,链轮1左面与左摩擦片2的右面摩擦传动,左摩擦片2的左面与左法兰盘3的右面摩擦传动,从而带动排屑机传动轴4转动;链轮1右面与右摩擦片5的左面摩擦传动,右摩擦片5的右面与右法兰盘6的左面摩擦传动,右法兰盘6通过平键7带动排屑机传动轴4转动。
碟形弹簧8设置于圆螺母9与右法兰盘6之间,碟形弹簧8往左给右法兰盘6、右摩擦片5、链轮1、左摩擦片2施加一定的压力,这压力的大小可以改变左摩擦片2与右摩擦片5产生的摩擦力大小,压力的大小可以通过安装在排屑机传动轴4外端设置的螺纹上的圆螺母9来进行调节,如果顺时针旋转圆螺母9,碟形弹簧8产生的压力增大,进而摩擦传动力增大,反之则减小,所以圆螺母9可以用来调节排屑机的力矩[1]。假如排屑机发生堵转,当堵转的力大于摩擦力时,链轮1、左摩擦片2、右摩擦片5空转打滑[2],排屑机传动轴4不转,从而保护了电动机和排屑机机械零部件。
1.2 可调超力离合器式机械保护装置
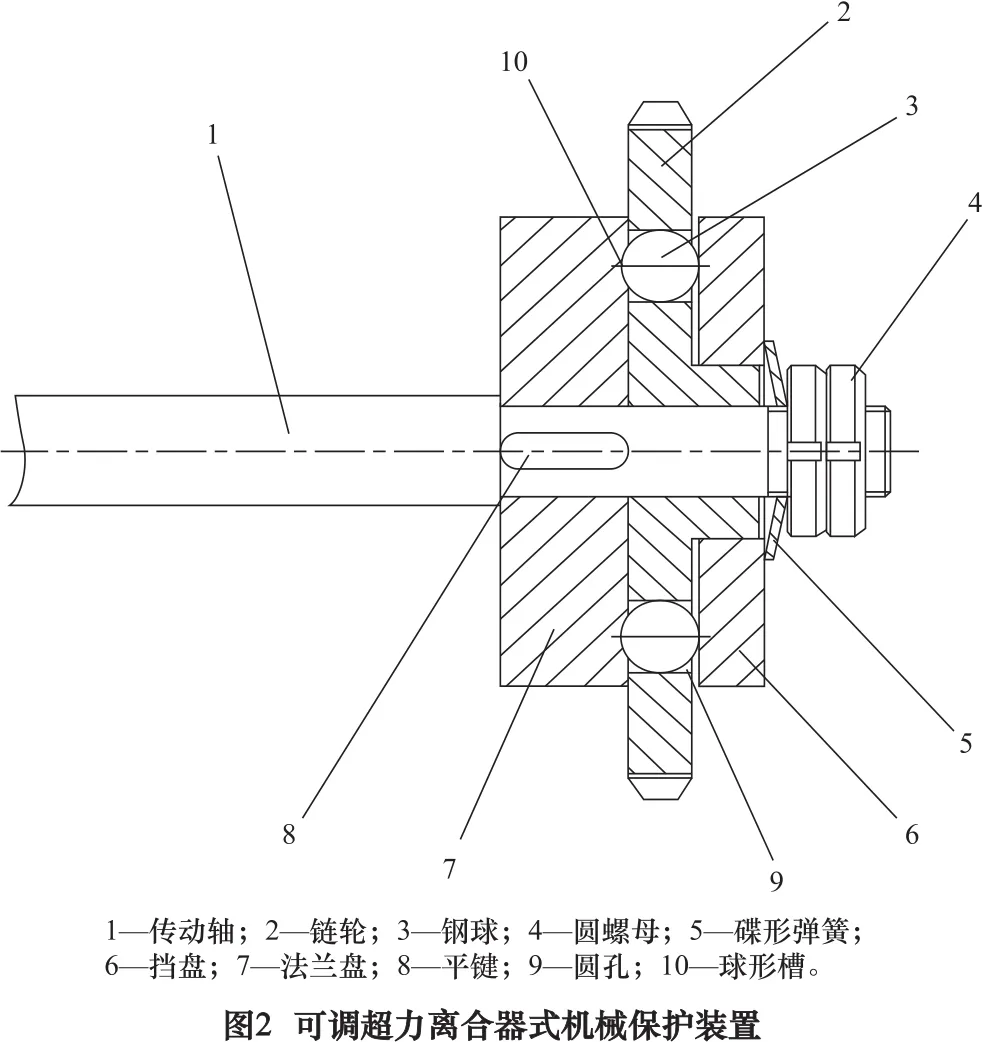
可调超力离合器式机械保护装置结构示意图如图2所示,包括由外向内依次安装圆螺母4、碟形弹簧5、挡盘6、链轮2、法兰盘7,传动轴1与法兰盘7通过平键8固定连接,链轮2套在传动轴1上,链轮2轮面的同一圆周上均匀设置有多个圆孔9,与每个圆孔9对应的法兰盘7的外表面上都设置有球形槽10,链轮2的圆孔9内部都安装有钢球3,每个钢球3的内端位于法兰盘7的球形槽10内,挡盘6通过套在传动轴1上的碟形弹簧5和安装在传动轴1外端的圆螺母4,压紧所有的钢球3,从而组成了一个可调超力离合器装置[3]。
工作时,卷屑电动机带动链轮2转动,由于钢球3受到挡盘6的挤压,钢球3与球形槽10啮合,从而带动法兰盘7旋转,法兰盘7通过平键8带动传动轴1转动。当排屑机因外力卡住时,传动轴1与法兰盘7停转,因外力超过了钢球3与球形槽10的啮合力,钢球3脱离法兰盘7的球形槽,链轮2继续由电动机驱动空转,实现了超力保护[4]。一旦外部卡住的故障被排除,钢球3重新进入法兰盘7的球形槽,从而恢复卷屑动作。通过调节圆螺母9,继而调节钢球3与球形槽10的啮合力,以实现不同场合下所需的卷屑力矩。
2 电气反馈保护装置设计
如果上述机械保护装置失灵,当出现排屑机因外力卡住时,上述两个机械保护装置的链轮不空转打滑,仍然与传动轴连接,这样卷屑电动机将无法带动传动轴,电动机将因过载而损坏,排屑机的零部件因强制受力而造成损坏。参照闭环反馈的原理,时刻“监控”传动轴是否卡死停转,及时将此信号反馈给数控系统,由数控系统控制卷屑电动机的工作[5]。
因此,增加了一种电气保护方式进行联保,如图1所示,在碟形弹簧8与圆螺母9之间安装一个感应支架10,感应支架是随传动轴旋转的,感应支架10上有4个金属感应片,均匀分配在圆周上,每90°一个金属感应片,在感应支架正上方安装有一个接近传感器11,型号为PRT12-4DO(感测距离为4 mm,PNP常开型)。当传感器正对着金属感应片时,传感器指示灯亮,指示灯亮的时间大概是1 s左右,同时监控信号为1并反馈给数控系统,控制电路如图3所示。在两个金属感应片之间,传感器指示灯灭,指示灯灭的时间大概是4 s左右,监控信号为0。
2.1 排屑机输入输出控制电路设计
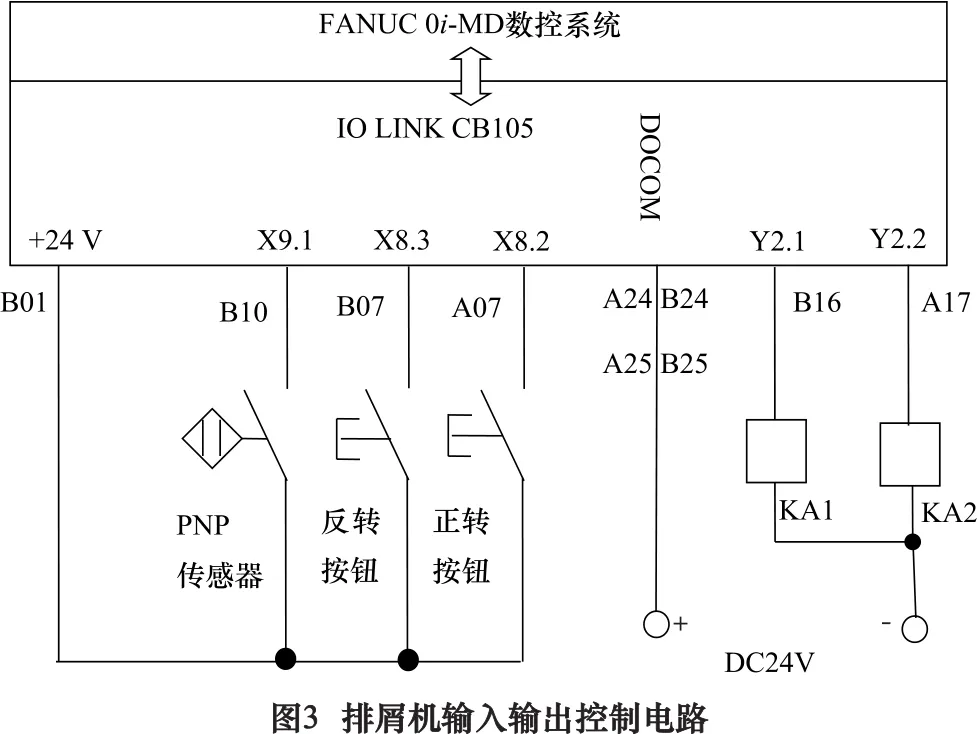
图3为排屑机输入输出控制电路,PNP传感器感应信号一端接在CB105的+24 V(B01端子)上,另一端接在B10端子上,其输入信号地址为X9.1;排屑机正转启动按钮的一端接在B01端子上,另一端接在A07端子上,其输入信号地址为X8.2;排屑机反转启动按钮的一端接在B01端子上,另一端接在B07端子上,其输入信号地址为X8.3。控制卷屑电动机正转的继电器 KA1接在B16端子上,其输出信号地址为Y2.1;控制卷屑电动机反转的继电器KA2接在A17端子上,其输出信号地址为Y2.2。例如当正转按钮按下时,X8.2为1,否则为0;当PNP传感器感测到金属感应片时,X9.1为1,否则为0;当 Y2.1为1时,KA1继电器得电吸合,排屑机正转。
2.2 防堵转保护梯形图设计思路
假如排屑机因卡住而堵转,排屑机传动轴不动,传感器会一直亮,或一直灭。因此在电动机控制程序中设置传感器感应信号超时判断功能,监控传感器感应信号持续为1的时间和持续为0的时间,持续为1的信号大于1 s或持续为0的信号大于4 s时,切断卷屑电动机正反转输出控制信号,从而保护电动机和排屑机机械零部件。可以假设两种排屑机堵转的情况:
(1)传感器正好检测到金属感应片时发生堵转,则此时X9.1为1的状态持续2 s,即认为排屑机卡住堵转。此时数控系统通过PMC命令卷屑电动机停止工作,同时在系统屏幕上出现排屑机卡住报警信息,以提醒操作人员检查排屑机卡住的故障。
(2)传感器没有检测到金属感应片时发生堵转,则此时X9.1为0的状态持续5 s,即认为排屑机卡住堵转。此时数控系统通过PMC命令卷屑电动机停止工作,同时在系统屏幕上出现排屑机卡住报警信息,以提醒操作人员检查排屑机卡住的故障。
2.3 防堵转保护梯形图设计
根据上述设计思路,设计排屑机防堵转保护梯形图。如图4所示,X8.2是排屑机正转启动输入信号,Y2.1是卷屑电动机正转输出信号,X8.3是排屑机反转启动输入信号,Y2.2是卷屑电动机反转输出信号,X9.1是传感器监控信号,R1000.4排屑机卡住报警信号。梯形图中的Y2.2与Y2.1常闭触点为互锁触点,起到正反转互锁保护作用,X8.4为急停信号,正常情况下,该信号为1[6],一旦出现排屑机卡住故障,R1000.4线圈得电,R1000.4常闭触点断开,Y2.1与Y2.2线圈失电为0,卷屑电动机停转。
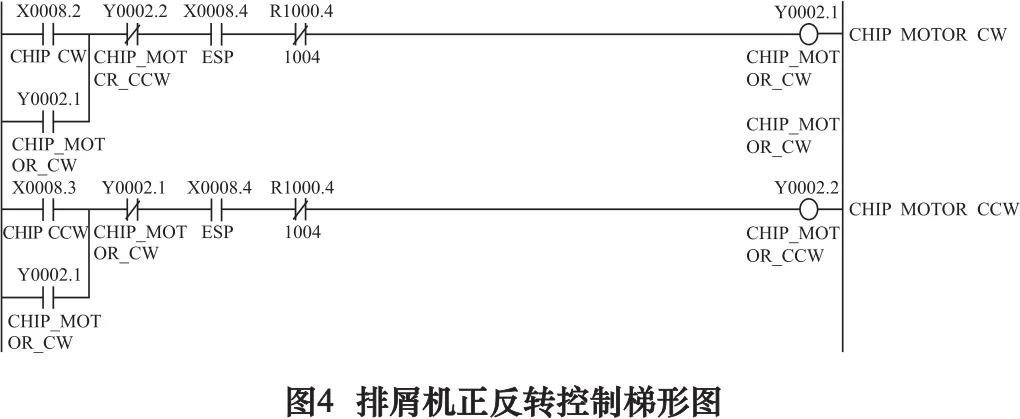
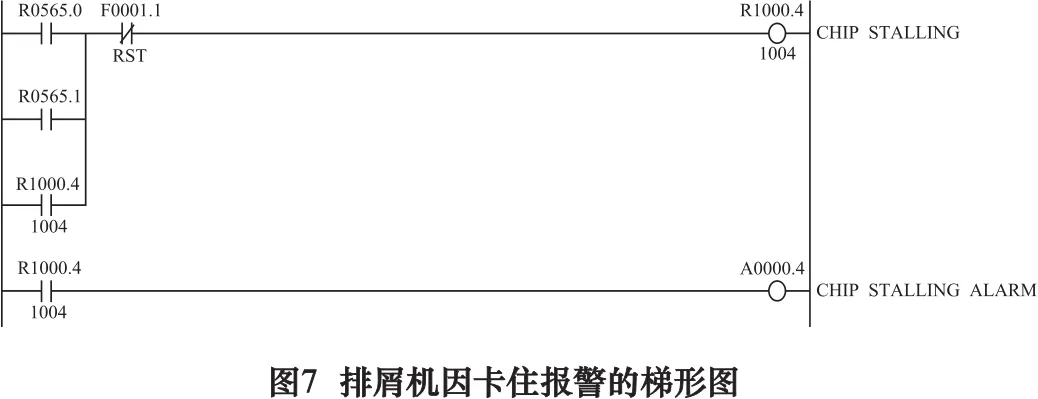
图5是排屑机正转或反转时,X9.1信号状态为1持续2 s的梯形图,利用TMRB定时器功能指令[7],时间常数设定为2 000 ms。排屑机正转或反转时,Y2.1与Y2.2其中一个为1,当传感器感测到金属片时,X9.1为1,图中的X9.1常开触点导通,此时TMRB定时器开始计时,计时到2 s时,线圈R565.0得电为1,图7中的R565.0常开触点闭合,线圈R1000.4得电为1,R1000.4的常开触点闭合,报警线圈A0.4得电,触发报警信息,紧接着在屏幕上显示“1004排屑机卡住报警(A0.4-R1000.4)”。同时,图4中的R1000.4常闭触点断开,Y2.1与Y2.2线圈失电为0,卷屑电动机停止转动,从而保护了电动机。
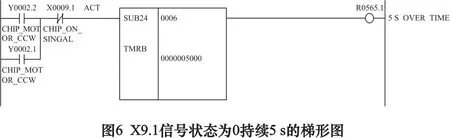
图6是X9.1信号状态为0持续5 s的梯形图,利用TMRB定时器功能指令,时间常数设定为5 000 ms。排屑机正转或反转时,Y2.1与Y2.2其中一个为1,当传感器没有检测到金属片时,X9.1为0,图中的X9.1常闭触点导通,此时TMRB定时器开始计时,计时5 s时,线圈R565.1得电为1。
图7中的R565.1常开触点闭合,线圈R1000.4得电为1,R1000.4的常开触点闭合,报警线圈A0.4得电,触发报警信息,紧接着在屏幕上显示“1004排屑机卡住报警(A0.4-R1000.4)”[8]。同时,图 4中的R1000.4常闭触点断开,Y2.1与Y2.2线圈失电为0,卷屑电动机停止转动,从而保护了电动机。

3 结语
这种机械与电气相互配合的防堵转保护装置性能优良,有效的保护了排屑电动机和机械零部件,延长了排屑机使用寿命,且可以根据不同的使用场合调节排屑力矩,扩大了其使用范围。电气保护设计中,用到了4个感应片,传感器监控信号为0的时间较长,可以适当增加感应片的数量,使传感器监控信号为1或为0的时间基本一样,缩短堵转检测时间。该排屑机防堵转保护装置已应用在HRLE系列链板式卷屑装置上,并授权了实用新型专利(一种排屑机的防堵转保护装置,专利号:ZL201721662161.2)