基于扰动补偿的表贴式PMSM滑模电流控制研究
2019-02-25阚卫峰齐仲安
阚卫峰,陈 渠,齐仲安
(1. 上汽集团商用车技术中心,上海 200041; 2. 上海交通大学,上海 200240; 3. 上海申沃客车有限公司,上海 201108)
0 引 言
表贴式永磁同步电机(以下简称SPMSM)具有高效、高功率密度、高可靠性等优点,广泛应用于新能源汽车驱动系统中[1-2]。矢量控制是一种常见的永磁同步电机控制框架[3]。该框架具有两个控制环:外环的速度控制环和内环的电流控制环。由于SPMSM的输出转矩仅正比于q轴电流,因此电流控制环对于转矩控制应用尤其重要。近年来,出现了许多永磁同步电机的电流控制策略[4-8]。文献[4]报道了一个具备鲁棒性能的电流控制器,该控制器可以改善传统电流控制器的鲁棒性和动态响应性能。文献[5]将在线参数自调节的方法引用到PI电流控制器。文献[6]通过使用预测电流控制策略降低了速度波动。文献[7-8]分别使用了电流补偿策略和扰动估计策略来改善电流控制器的性能。
滑模控制(以下简称SMC)策略是一种有效的电机控制方法,该方法可以应用到速度控制器[9-10],也可以应用到电流控制器[4,11]。SMC策略具有快速响应、对系统参数和扰动不敏感等优点,然而传统SMC策略会导致控制系统出现抖振现象。一些文献使用将开关函数替换为饱和函数或sigmoid函数的方法降低抖振[12-13]。 不过此方法会降低系统的响应速度。另一种解决方案是使用高阶SMC[10,14]。
本文设计了一种基于新的趋近率的SPMSM滑模电流控制策略,并对电机的各种扰动进行了统一的估计和补偿。新的趋近率是基于Super-Twisting策略设计的。新的具备扰动补偿的SPMSM滑模电流控制策略具有快速的响应性能和较低的抖振。最后,通过仿真模型和电机控制系统,验证了该控制策略。
1 永磁同步电机数学模型
SPMSM的模型由电压方程、磁链方程、电磁转矩方程和转子运动方程组成[2]。根据这些方程可以得到表贴式永磁同步电机的误差微分方程组:
(1)
式中:ωm是机械角速度,ωr是电角速度,ωm=ωr/p;id是d轴电流;iq是q轴电流;ud是d轴电压;uq是q轴电压;R是定子电阻;L是绕组电感,L=Ld=Lq;ψf是永磁磁链;p是极对数;Bm是阻尼系数;T是负载转矩;J是运动惯量;ed,eq和em分别是id,iq和ωm的误差;idref,iqref和ωmref分别是id,iq和ωm的参考值。
将参考微分值、阻尼系数、负载转矩和其它扰动统一考虑为综合扰动,式(1)变换:
(2)
式中:δd,δq和δm分别是id,iq和ωm的综合扰动。最后根据式(2)可以获得SPMSM的通用误差方程:
(3)
式中:e表示id,iq或ωm的误差;u表示电压ud或uq;c是一个通用项,对于id,它是Rid/L-iqωr,对于iq,它是Riq/L+idωr+ψfωr/L,对于ωm,它是0;δ表示id,iq或ωm的综合误差。
2 滑模电流控制策略
2.1 矢量控制框架
典型的SPMSM矢量控制结构如图1所示[3]。该结构通过坐标变换对三相电机电流进行了解耦。对SPMSM来说,由于Ld几乎等于Lq,更是可以获得完全的解耦。该框架包含两个控制环,共三个控制器:速度控制器、id控制器和iq控制器。外环是速度控制环,对于转矩控制应用,该环可以取消。内环是电流控制环,主要通过控制iq来调节电机的转速或者转矩。本文主要关注于电流控制器(id控制器和iq控制器)的研究。
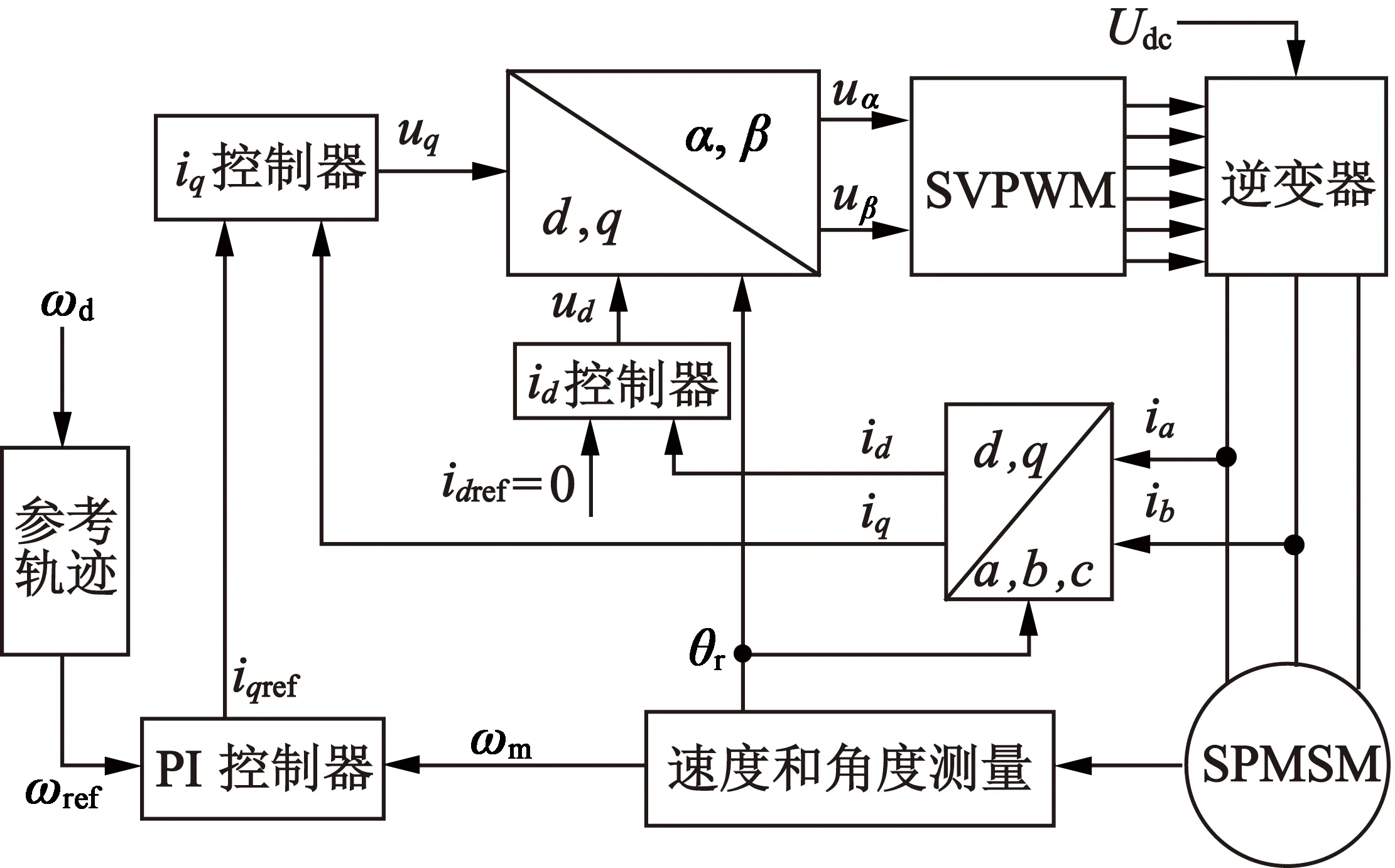
图1 SPMSM 矢量控制框架
2.2 速度控制器
速度控制器使用了一个参考轨迹模块和一个PI控制器,如图2所示。参考轨迹模块用来生成固定斜率的参考速度轨迹,其描述方程:
(4)
式中:ωref是参考速度轨迹;ωd是速度给定值;G是增益;Ts是采样时间;sat是饱和函数;k是计算次数,为正整数。速度控制器的模块图如图2所示。

图2速度控制器
2.3 滑模电流控制器
SMC的设计一般分为两步:选择一个滑模面;设计一个趋近率。基于通用误差方程式(3),传统滑模电流控制器的滑模面可以选为[15]:

对滑模面求微分,得:
(6)
式中:s是滑模面;α是积分系数;ε是趋近率增益。根据式(3)和式(6),并忽略扰动,则传统滑模电流控制器的控制律可以表示:
(7)
改进的滑模电流控制器从两个方面进行改进:滑模面和趋近率。对于滑模面的选取,为了提高电流响应速度,使用端末积分滑模面[16]。这样新的端末积分滑模面:
式中:0 <λ< 1。同理,可以得到滑模面的微分:
(9)
v是趋近率,这样新的滑模控制器控制率:
(10)
在式(7)中,v是-sgn(s)。 这种基于简单开关函数的趋近率趋近速度有限,且会造成控制信号中出现高频的开关谐波。为了解决这个问题,本文基于Super-Twisting 趋近策略[17],提出了一种改进的趋近率:
式中:β,k,φ和χ是趋近率的增益项。
滑模控制器稳定性准则:
(12)
代入趋近率v可得:
ε表示滑模控制器的趋近速度。为了保证系统稳定,ε必须大于0。这样式(13)可以分为两部分。第一部分是:
(14)
可以看到,这部分是稳定的,同时β需要合理的设计。第二部分是:
(15)
因为积分项的存在,这一部分的稳定性是不确定的,因此χ和φ对系统的稳定性是有影响的。SMC中滑模面s是在0附近的,这一部分的值会很小,并接近于0。为了保证系统的稳定性,χ和φ应该取较小的值。
2.4 扰动估计策略
综合扰动δ包含参考微分、阻尼系数、负载转矩和其它扰动。δ存在于控制律式(10)中,会影响控制律的控制性能。扰动估计策略可以提供一个δ的估计值,从而获得更好的控制律。根据式(3),可以获得综合扰动δ的计算公式:
(16)
在式(13)和式(16)中,均存在微分计算,而一般的微分计算法会带有大量的谐波。因此,这里使用鲁棒微分器和FIR滤波器的串联结构获得一个不带有谐波的微分值。FIR滤波器使用20阶10 kHz。鲁棒微分器的设计方法如下[18]:设定一个输入信号e(t)并假设它的微分绝对值的上限值为X(X>0),可得:
式中:ees是e的估计值,ees(0) =e(0);m和d是系数,取值范围如下:
(18)
电流控制器的方框图如图3所示。
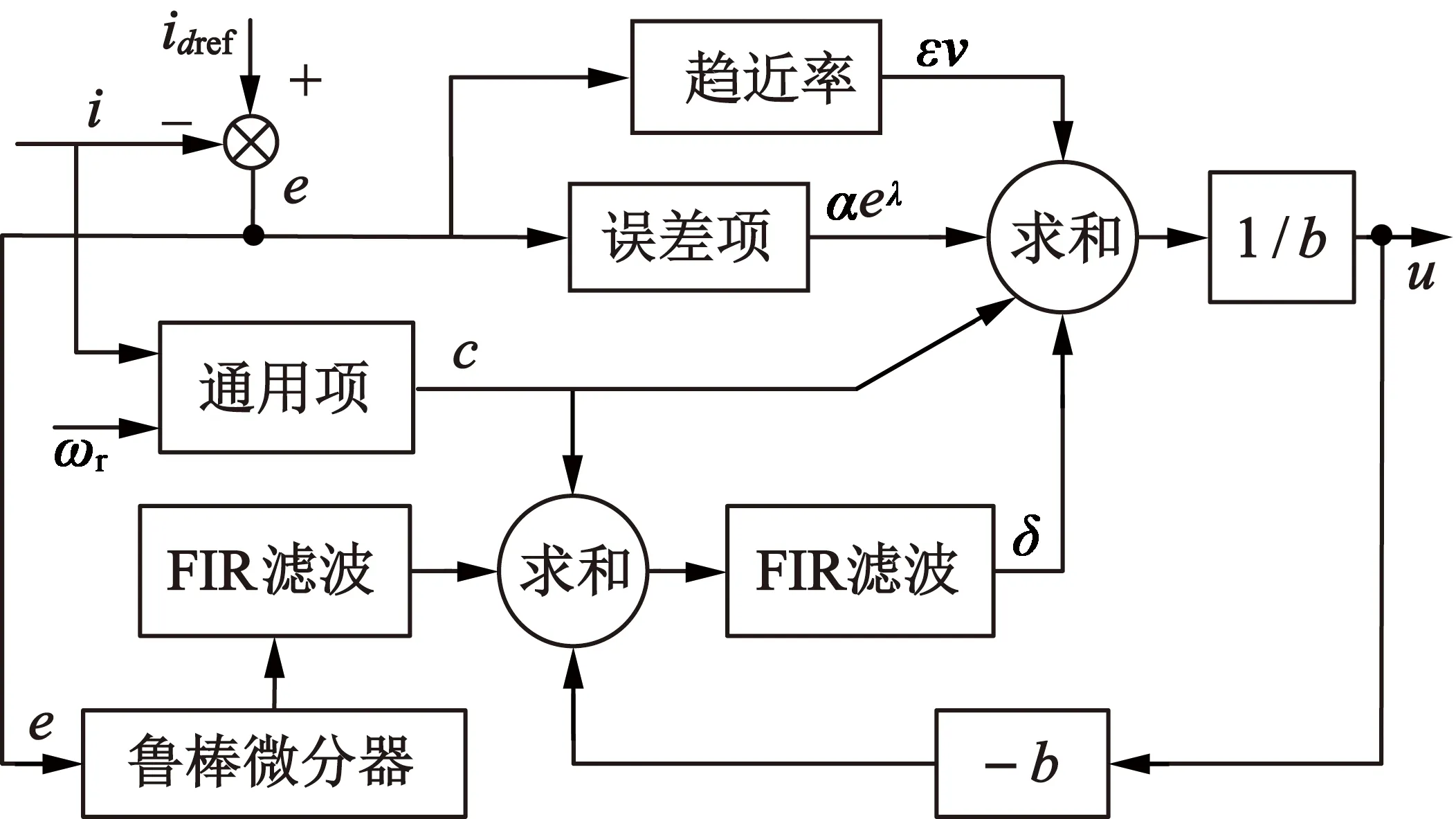
图3 电流控制器
3 仿真验证
为了验证所设计的滑模控制律性能,在MATLAB/Simulink软件中搭建了以上控制策略和SPMSM的仿真模型。SPMSM和相关电路模型使用 SimPowerSystems工具箱搭建,控制策略使用Simulink常用模块搭建。仿真的参数设置如表1所示。
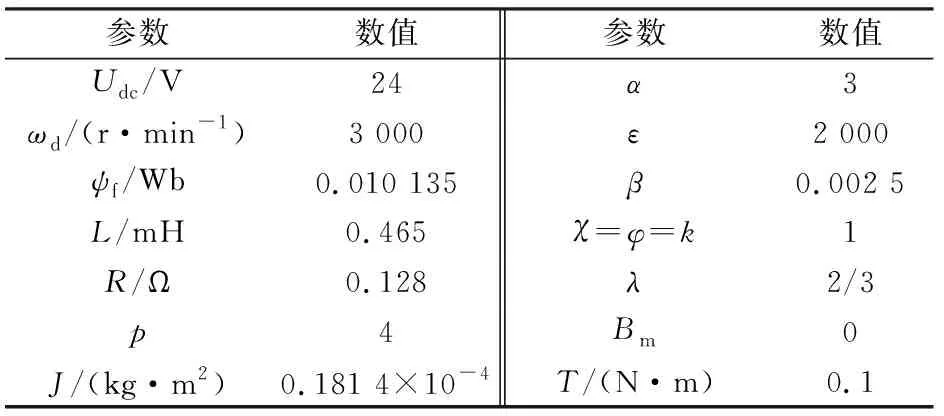
表1 SPMSM仿真参数
3.1 电流控制比较
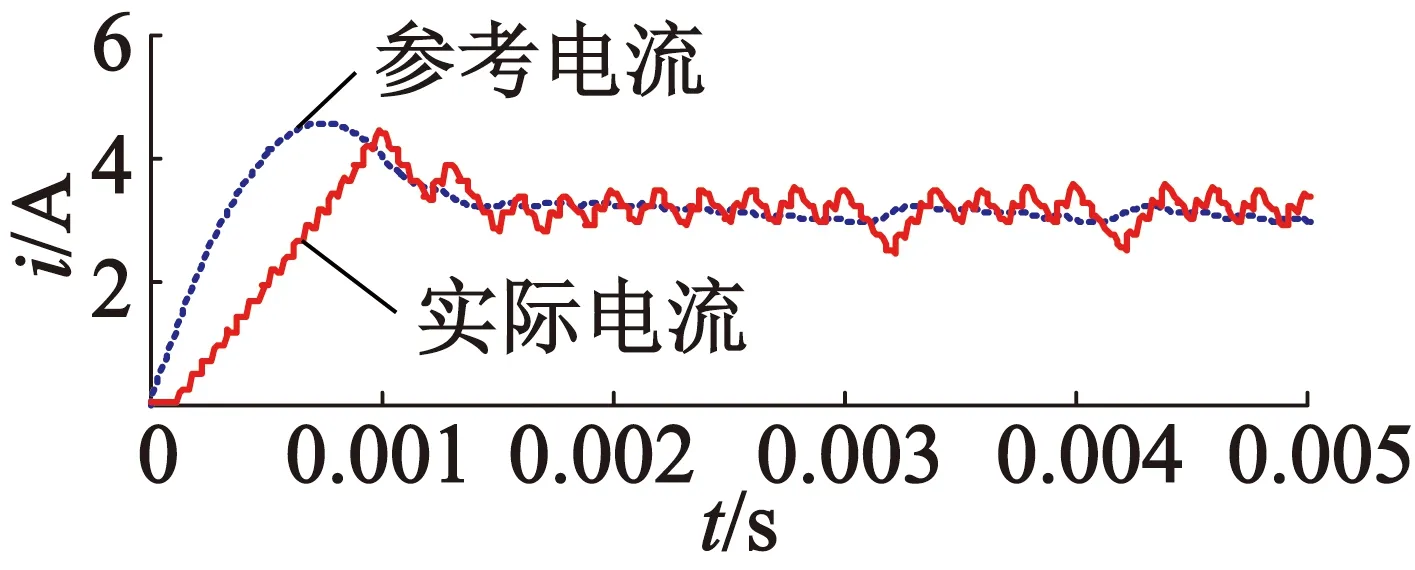
图4和图5是新的SMC策略和传统SMC策略在表1参数下电机起动过程中的q轴电流iq的响应曲线。传统滑模与新的滑模使用相同的速度控制器和相同的参数(α和ε)。从图4可以看到,传统SMC策略具有更大的电流纹波,而新的SMC策略幅值电流纹波更小,谐波更低。从图5可以看到,新的SMC策略具有更快的响应速度,更小的超调量,对于参考电流的追踪更加精确。
(a) 传统SMC

(b) 新的SMC
图4iq波形比较
(a) 传统SMC
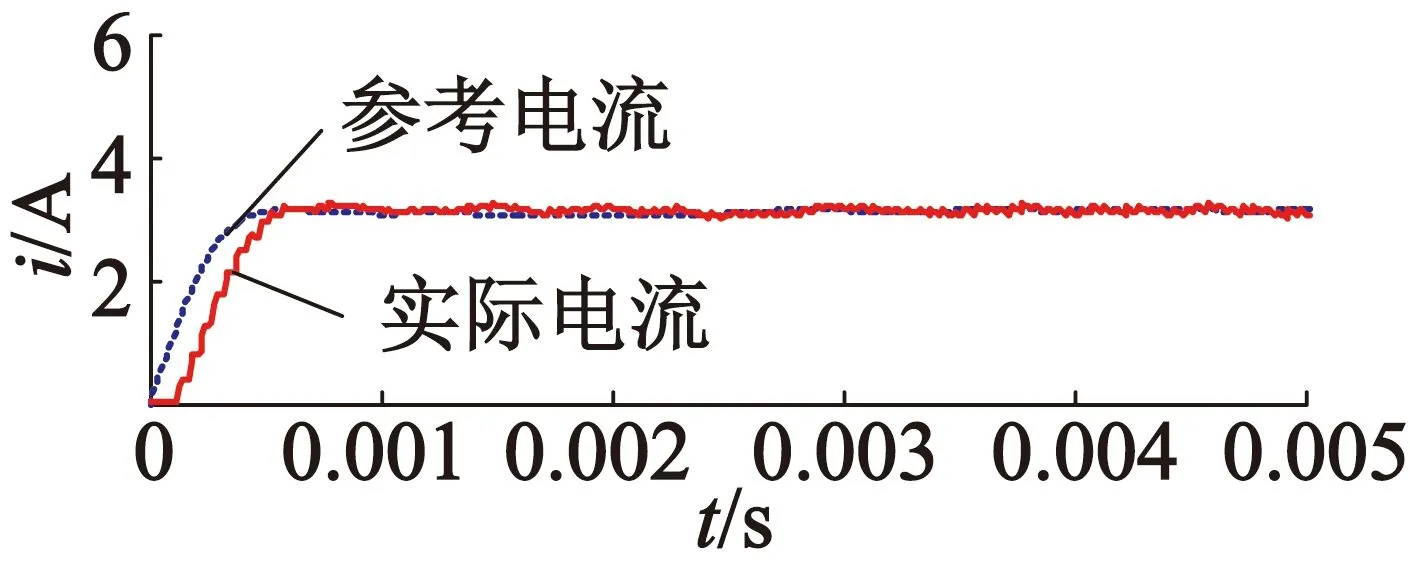
(b) 新的SMC
图5电动起动时iq响应
3.2 性能测试
图6为变转矩测试时的iq响应结果。性能测试的环境:转速ωd恒定为3 000 r/min;负载转矩T的初始值为0.1 N·m,之后在0.2 s时变为0.2 N·m,最后在0.4 s时变回0.1 N·m。从图6的响应结果可以看到,实际电流可以精确地追踪参考电流的变化。在整个控制范围内,电流响应精确、稳定。由于在SPMSM中电磁转矩和iq线性正相关,因此,从图4~图6的结果中可知,新的SMC策略具有较快的转矩响应速度,精确的转矩追踪效果。适合于SPMSM的转矩控制应用或转速控制中的电流环控制应用。
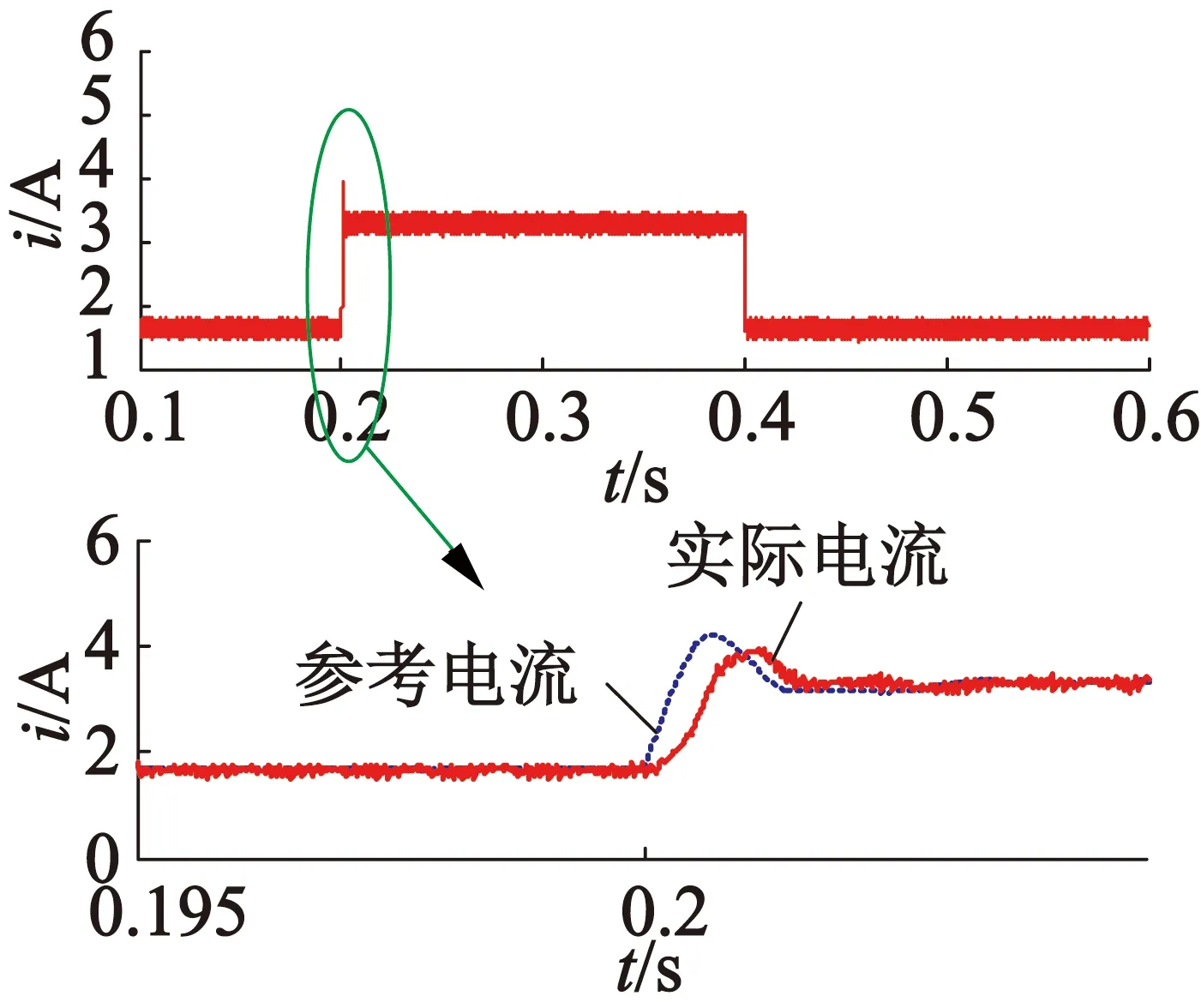
图6 变转矩下的iq响应
4 实验验证
为了进一步验证该策略的可行性,利用一个SPMSM控制系统进行了电机控制实验。电机的参数如表1所示,控制参数和负载情况根据实际情况进行了一定的调整,由于控制器运算能力限制,实验中未包含扰动估计算法。实验配置如图7所示。实验中使用UART串口发送和采集电机数据,使用MATLAB对数据进行处理和绘图。
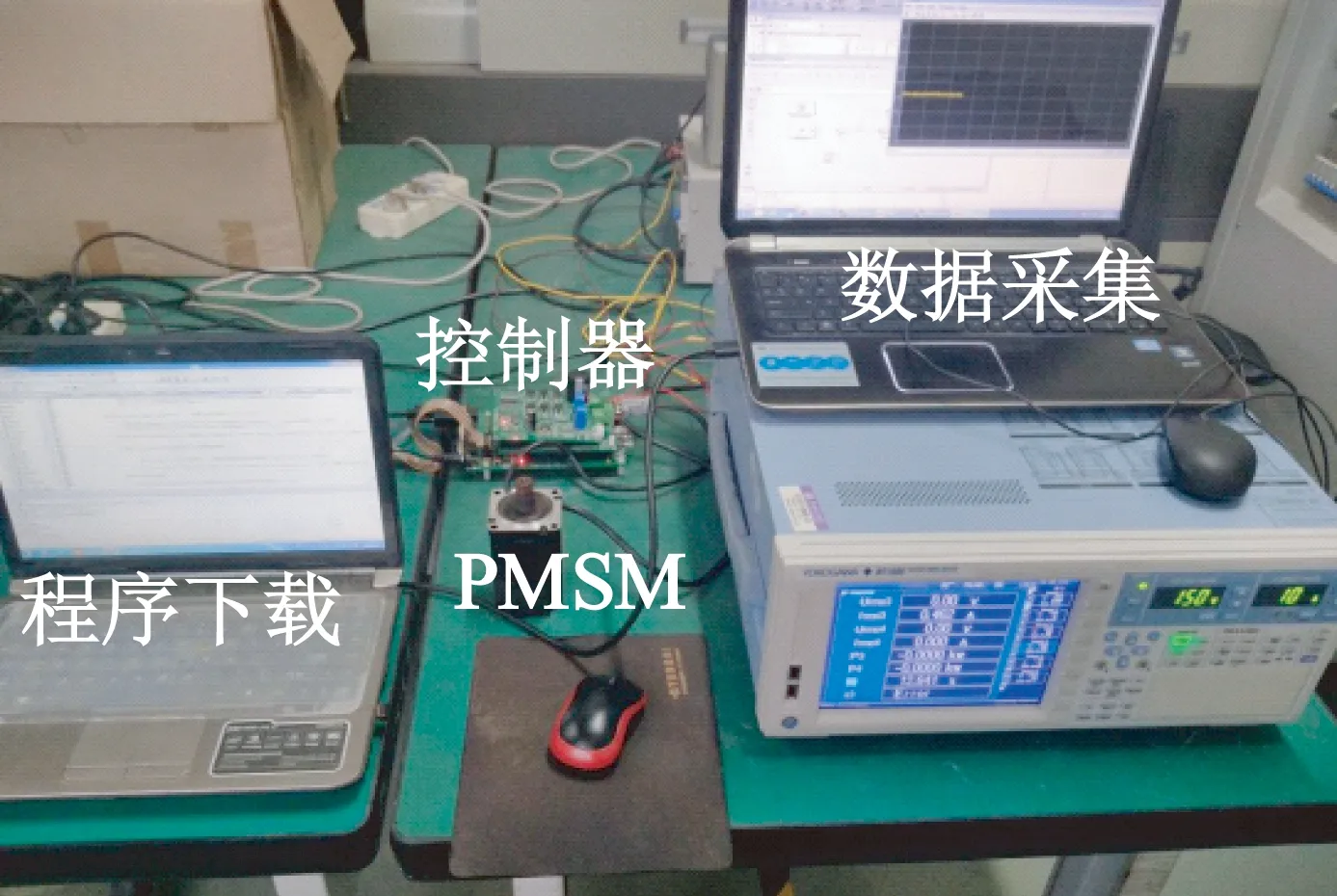
图7 实验配置
图8和图9为实验结果。其中图8为转速实验结果,图9为电流实验结果。电流和转速的实际值可以较好地跟踪参考值的变化。可以看到,所提出的控制策略是可行和有效的。
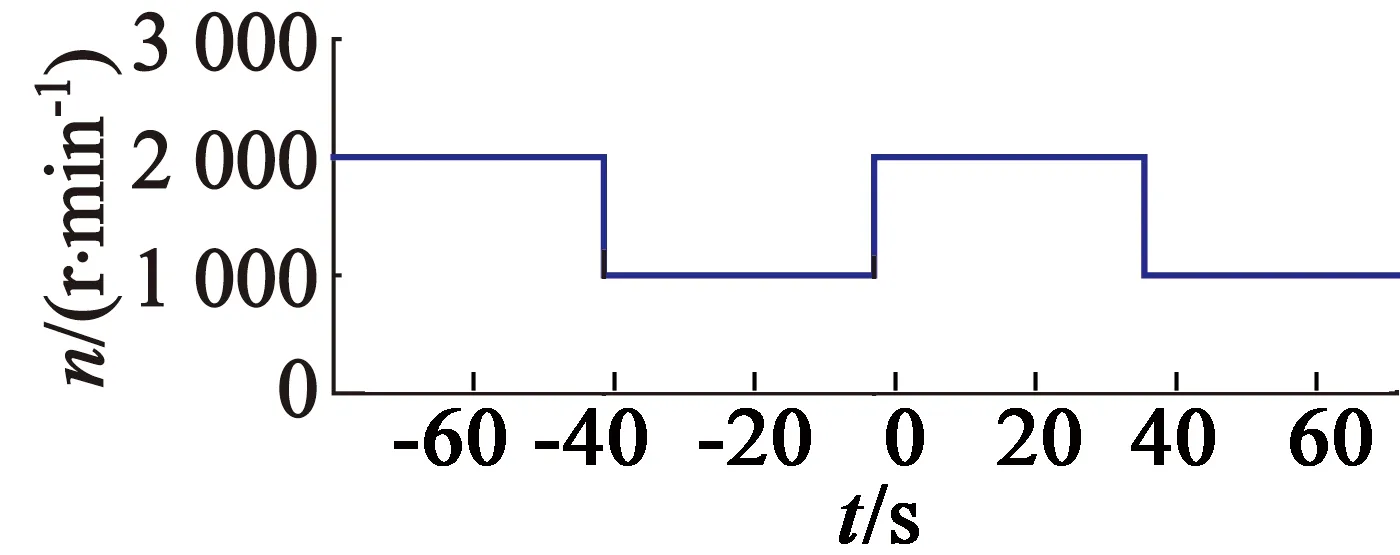
(a) 参考速度
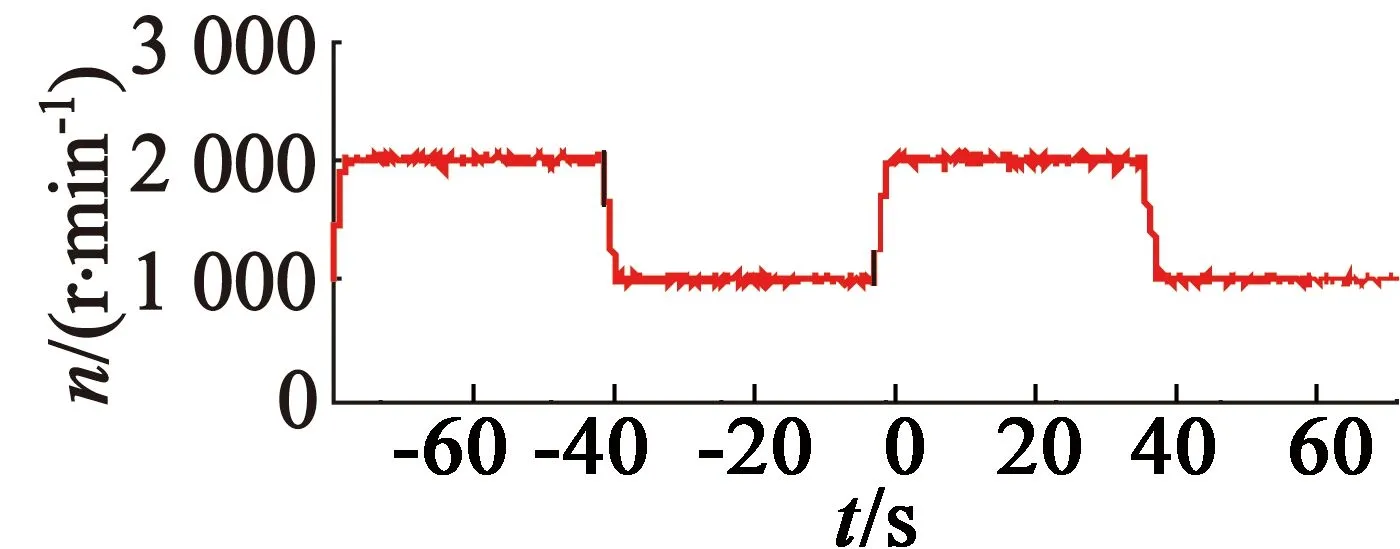
(b) 实际速度
图8转速响应实验结果

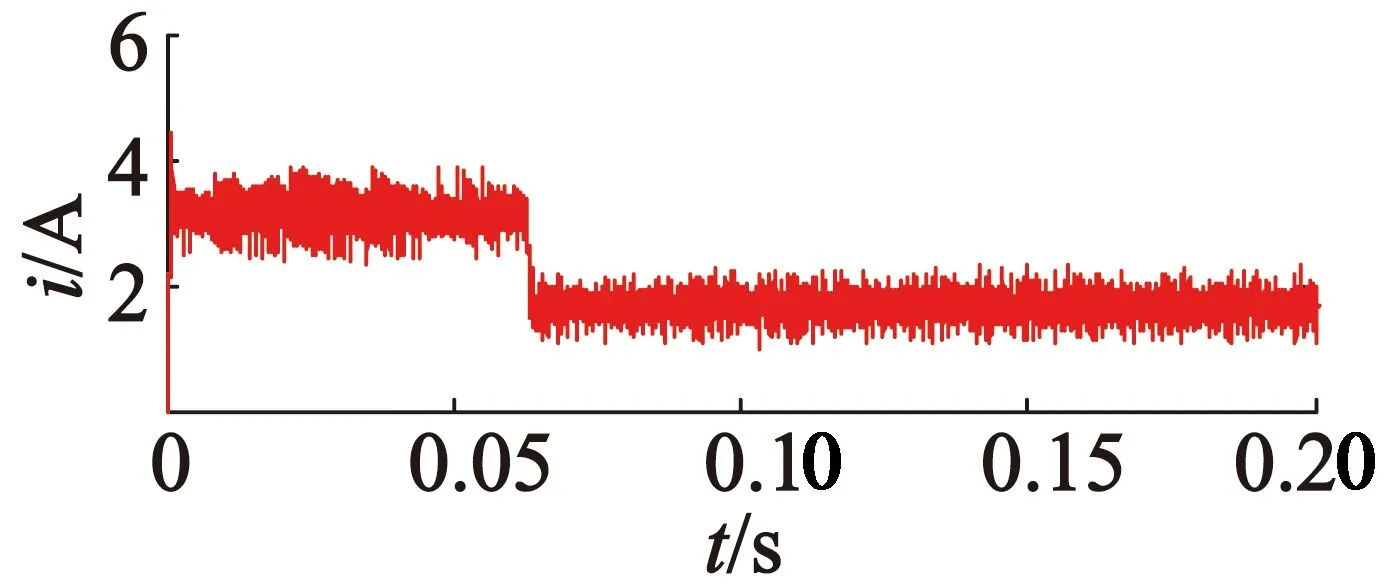
(a) q轴电流参考
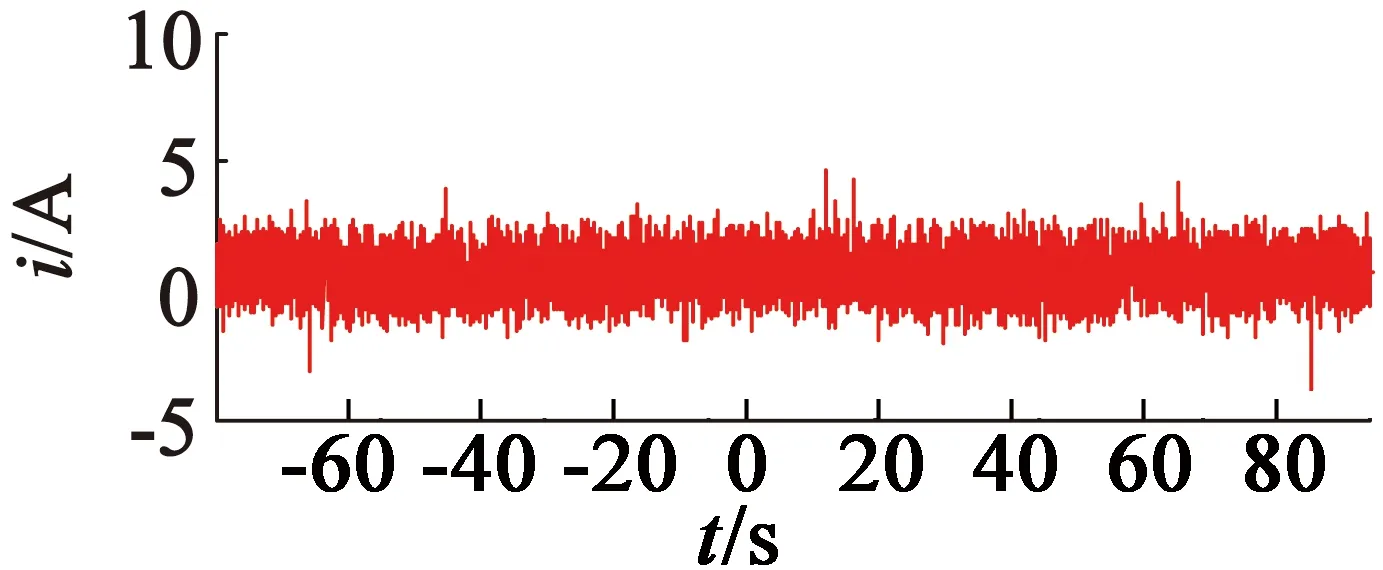
(b)q轴电流测量值
图9iq响应实验结果
5 结 语
针对SPMSM,设计了一种具有扰动补偿能力的滑模电流控制策略。该控制策略能够有效改善滑模控制中出现的抖振现象,提高电流响应速度和追踪精度。最后通过MATLAB/Simulink仿真模型和电机实验系统进行了仿真和实验研究。结果表明,相比于传统的SMC策略,在新的控制策略下,电流响应速度和精度明显提高,电流稳定谐波大为减小。新的电流控制策略可靠、有效。
