电动汽车用六相永磁同步容错电机设计
2019-02-25刘慧博
刘慧博,杨 欢
(内蒙古科技大学,包头 014010)
0 引 言
汽车产量的快速增长,加速了世界石油资源的消耗,同时,汽车尾气也给环境造成了一定程度的污染。因此,电动汽车的研究愈加重要。电动机是汽车的核心,它的性能好坏直接决定着汽车的性能。传统的三相永磁同步电机在运行过程中发生缺相故障后,电机的输出转矩大幅下降,转矩脉动大幅增加,发热、噪声和振动增大,严重时会烧毁电机,不利于实际运行。电机故障严重威胁着整个汽车的安全以及人身安全。所以,研究具有容错性能的多相电机具有很好的应用前景。
文献[2]提出容错电机的定义,分析了故障类型,并研制了一台六相八极电机,但其气隙磁密不高,输出转矩以及效率低。文献[3]设计了一台混合动力汽车用五相永磁电机,提高了电机的电磁转矩性能,但其有很大的磁耦合,不利于容错算法控制。国内方面,文献[4]研究了十五相永磁电机的矢量控制,提出全数字矢量控制法。文献[5]设计了一种半十二相永磁电机,采用分数槽集中绕组,使电机的电磁转矩有很大提高。文献[6-7]研究了六相十极永磁电机,深入分析了极数槽数对电机空载转矩的影响,并研究了相应的容错控制策略。当前,在多相永磁电机原理上的研究比较成熟,但其应用在电动汽车上的研究还处于起步阶段,对其的电机设计、容错控制算法及故障检测等方面还需深入研究。
本文针对六相双Y移30°绕组永磁同步容错电机进行研究,根据电动汽车所用电机的性能指标进行电机设计,在Maxwell软件中建立模型,仿真分析电机空载和负载时的反电动势、转矩等基本性能。分析了电机在发生故障后电机转矩波动的原因,从磁动势出发,提出降低转矩波动的容错控制策略,通过仿真实验验证容错控制策略的可行性。
1 电机设计分析
永磁同步容错电机需要做到物理隔离、热隔离、磁隔离、电气隔离等。需要采用单层集中绕组来实现相与相之间的物理隔离,即每相绕组都采用集中式隔齿绕制,避免各相绕组发生物理接触,进而产生的热量不会直接传递到相邻相。选择窄而深的槽形,可抑制短路电流产生的磁链进入其他绕组,避免了磁耦合。
1.1 性能指标
根据电机技术要求和客户要求,所设计的电机性能指标:额定功率22.5 kW,额定转速3 900 r/min,额定电压220 V,额定电流50 A,额定转矩5.5 N·m,铁心长度140 mm,定子外径不超过300 mm,效率大于85%。
1.2 永磁体的选择
在电机设计时,永磁体材料的选择至关重要,需要满足以下几个要求:机械性好,便于加工;磁性能好,能够产生相应的磁场强度;价格便宜。本文选择钕铁硼(NdFeB)永磁材料,它具有良好的矫顽力和较高的磁能积。具体牌号为N35,剩磁Br为1.2 T,矫顽力Hc为890 kA/m,最高工作温度80 ℃。
不同结构形式的转子具有不同的特性,按永磁体安装方式可分为表面贴装式、辐条式和嵌入式。表面贴装式没有凸极效应,漏感系数小,同时其结构简单,相对其他结构可减少成本,此外采用表贴式结构的电机输出功率大于其他结构,反电动势波形中的总谐波变形也比其他结构的小。因此转子结构选择表面贴装式。
1.3 极数槽数的选择
电动汽车用电机要兼顾低速和高速的性能,当电机的极数太多时,不利于电机的高速运行;当极数太少时,会使定子轭部变厚,增大了电机的体积,同时,会使永磁体极弧度变大,不利于永磁体安装,增加了电机的成本。所以要综合考虑各个因素来确定电机极数。定子槽数的确定需要考虑谐波、损耗等,合理的槽数可以降低齿槽转矩幅值,减小振动、噪声。极数槽数选择时需要满足以下条件:对于六相双Y移30°电机,其定子槽数选择必须为12的整数倍;采用集中式绕组结构,其节距为1。满足以上条件的极槽数,仿真分析其气隙磁场,最终选择电机的极槽数为10/24。
1.4 电机主要尺寸设计
电机主要尺寸与电机转速、功率和电磁负荷等有一定的内在关系,如下式:
1.5 绕组设计
绕组采用双Y移30°方式,如图1所示。ABC是一套绕组,DEF是另一套绕组,两套绕组互差30°的电角度和机械角度。和传统三相电机绕组结构相比,六相双Y移30°绕组具有降低高次谐波、提高绕组材料利用率、降低谐波损耗等优势。
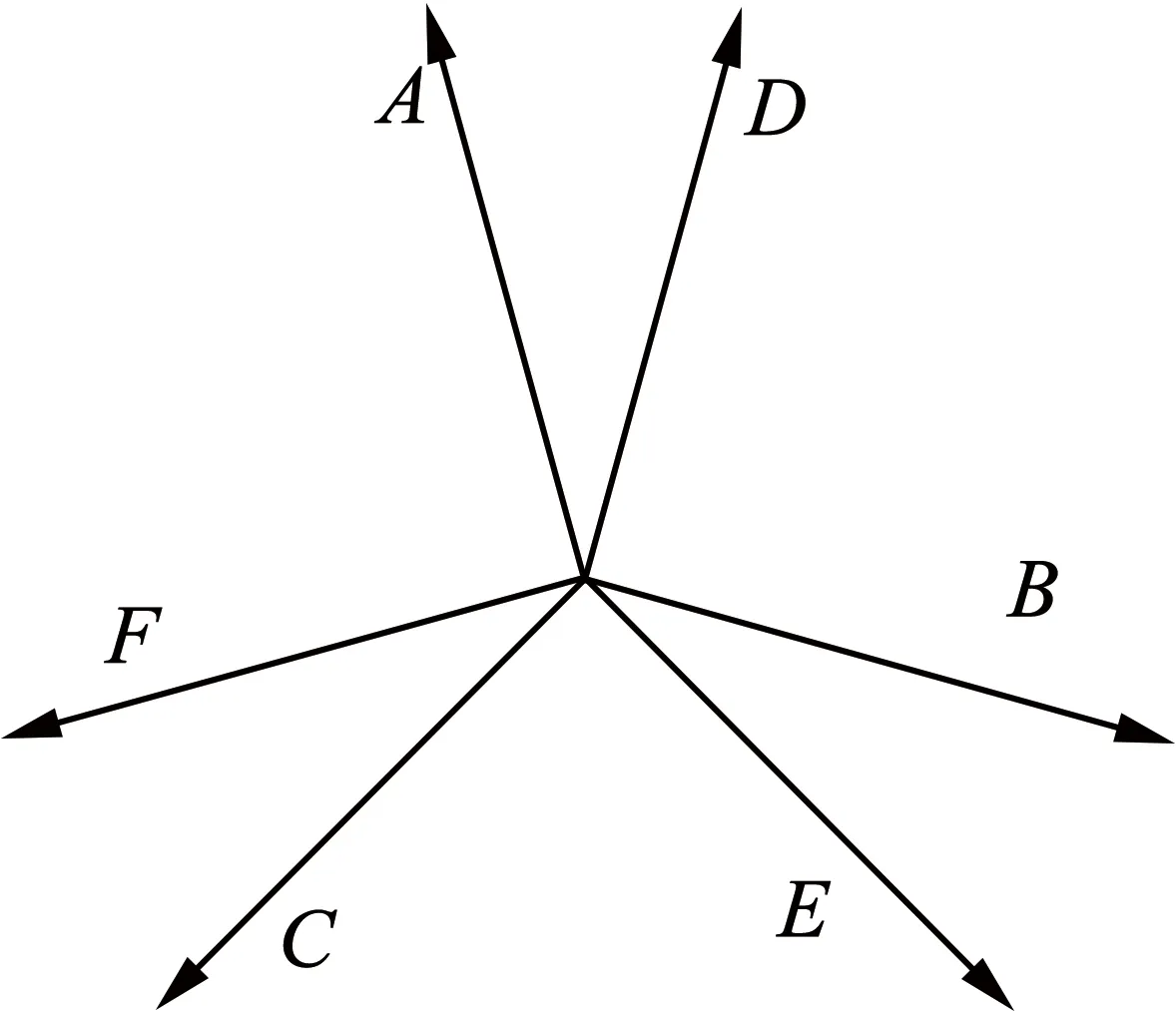
图1 双Y移30°
1.6 电机参数
综合考虑以上因素,可以得到电机主要参数如表1所示。
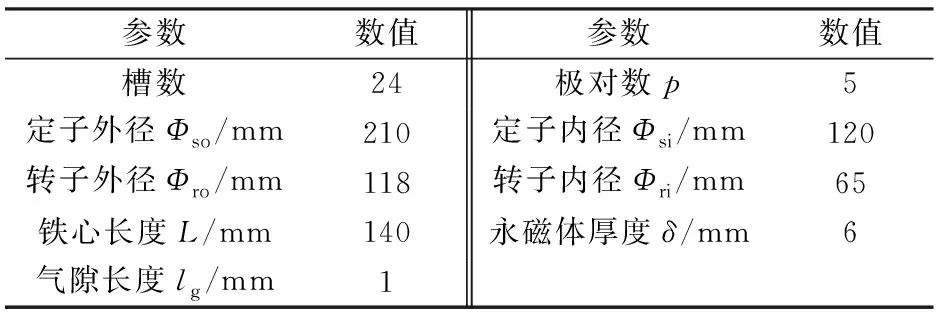
表1 电机参数
1.7 驱动电路设计
驱动电路采用6个H桥式逆变电路,6个H桥相互独立,每个H桥连接一相绕组,当逆变电路或绕组出现短路、断路等故障时,由于没有中性点连接,可以直接断开母线上的开关,从而不会影响其他相绕组。驱动电路如图2所示。
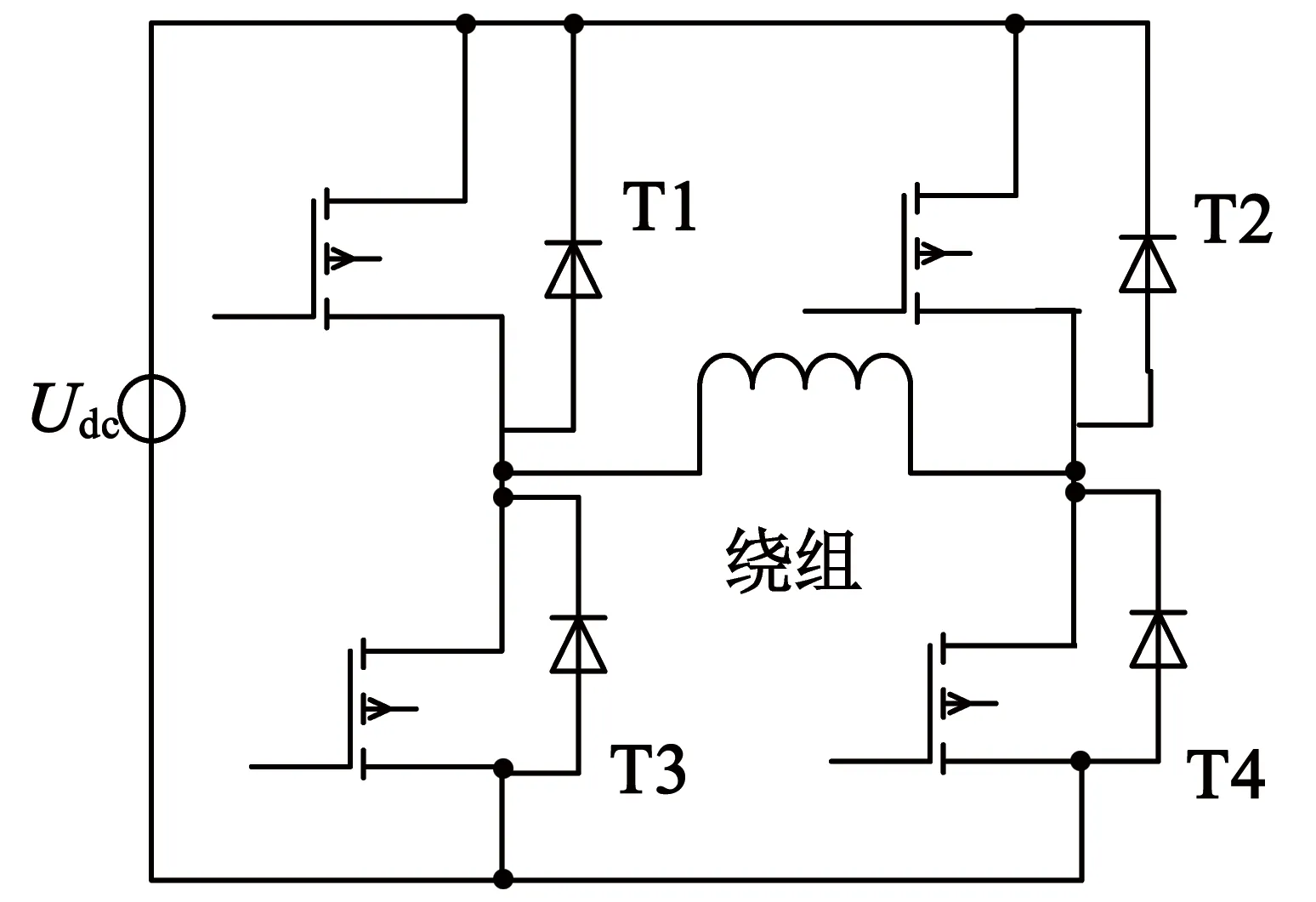
图2 单相H桥电路
2 仿真分析
Ansoft软件中有两个设计仿真所用的工具,分别为Maxwell和RMxprt[9-12]。这里采用Maxwell模块进行电机模型建立,建立的模型如图3所示。电机模型中各个部分都添加相应的材料,然后每相绕组加上对应的电流激励。A,B,C三相之间互差120°,D,E,F与A,B,C相差30°。
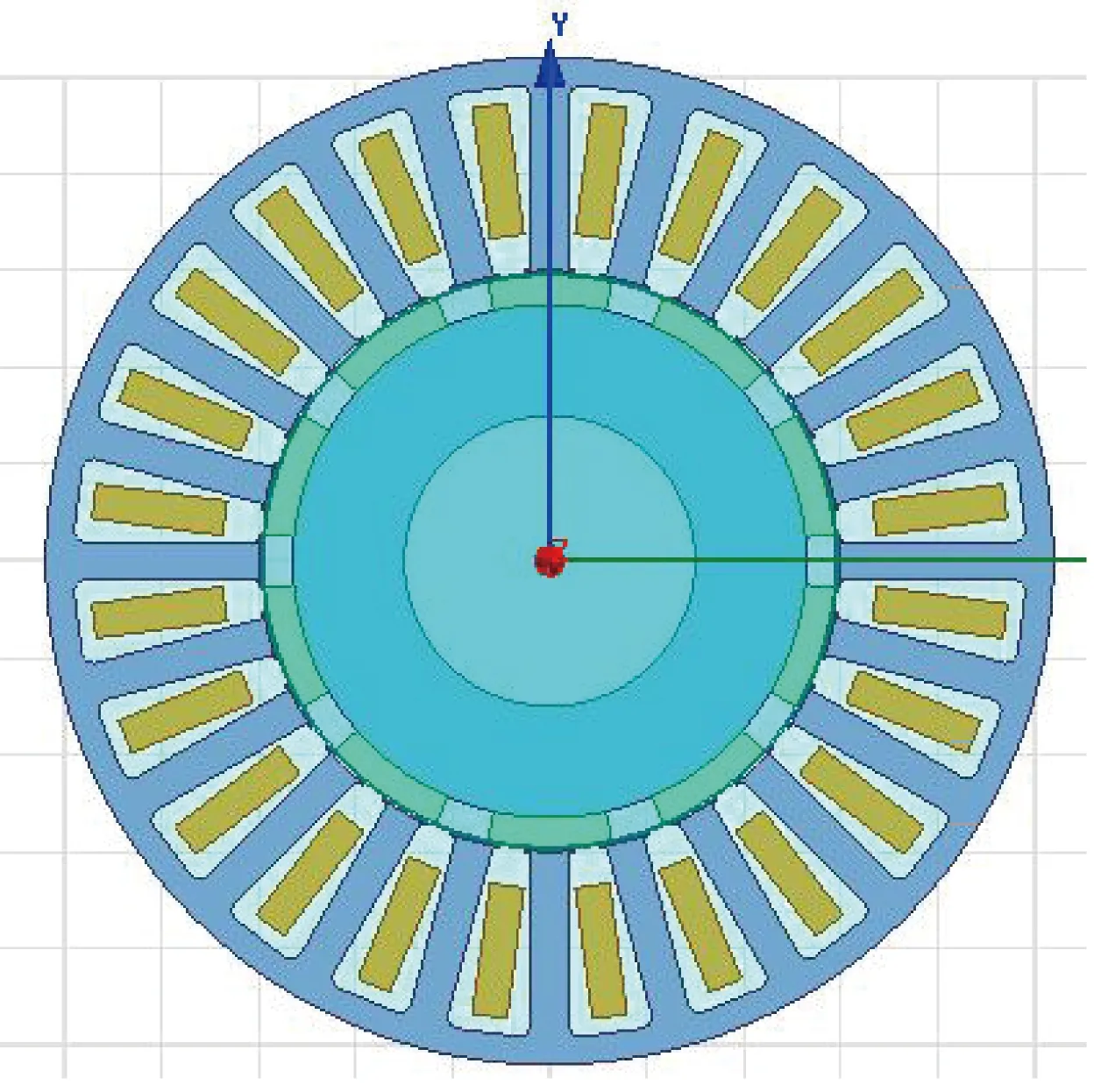
图3 电机模型
2.1 空载反电动势分析
永磁同步电机中,空载反电动势是由永磁体产生的气隙磁密的基波主磁通切割绕组产生的。它的大小影响着电机的动态性能和稳态性能,将其设计好,可以降低定子的电枢电流,进而降低电机温升,提高电机的效率。加入定子斜槽,可以降低谐波含量,从而使反电动势波形更接近正弦波。电机空载运行时,将各相电流输入设置为零,可以得到相应的空载反电动势,A相反电动势波形如图4所示。
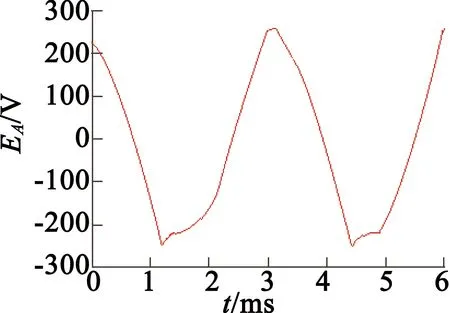
图4 A相空载反电动势波形
2.2 气隙磁密分析
通过Maxwell有限元分析,可得到空载时气隙径向磁密,如图5所示,以及加上电流激励时气隙径向磁密,如图6所示。由于定子开槽,所以会有尖峰,尖峰越大,说明定子槽口越宽。通过对比可知,负载时气隙径向磁密受交轴电枢反应影响,一些气隙磁密加强,一些气隙磁密减弱。总之,负载时气隙径向磁密和空载时一样。
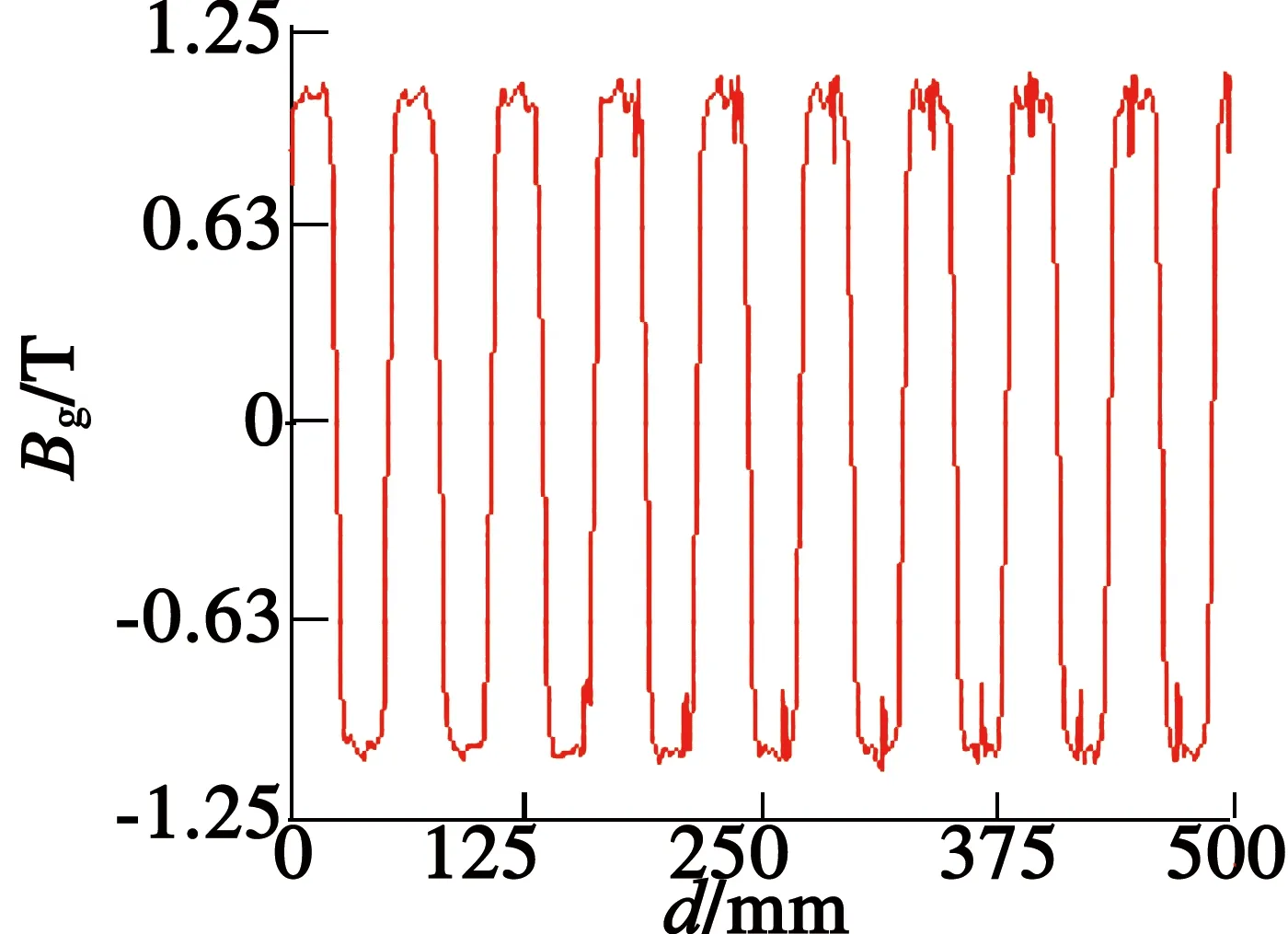
图5 电机空载气隙径向磁密
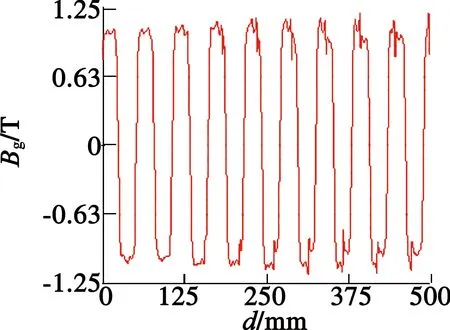
图6 电机负载气隙径向磁密
2.3 转矩分析
在永磁电机定子绕组不输入电流时,永磁体与电枢齿之间相互作用会产生齿槽转矩,它会使电机产生噪声和振动,使电机运行不平稳,影响电机性能。当采用定子斜槽后,电机的空载齿槽转矩峰值仅为0.7 N·m,如图7所示。
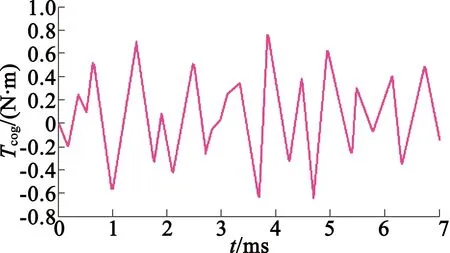
图7 空载齿槽转矩
3 缺相容错分析
3.1 容错策略
电机在运行过程中,电机本体及驱动电路中的电子器件都有可能发生故障,通过故障检测以及故障隔离,可以把故障转化为缺相故障。电机正常运行时,各相绕组通以正弦电流,分别如下:
(1)
当D相缺相时,D相的电流为零,如果其他相电流不变的话,气隙中产生的磁场将变成椭圆形,转矩波动会明显增大,电机无法正常运转。为了保证电机运行的连续性,需要调整剩余相电流,使气隙中仍产生圆形旋转磁场。将六相绕组看成两套对称三相绕组,A,B,C三相无故障的相电流保持不变,改变E,F两相电流的相位。重新施加电流:
(2)
式(2)中的α,β是E,F相电流需要调整的角度。发生缺相前后,D,E,F三相产生的转矩分别如下:
应使T=T′。正常情况下D,E,F三相产生的基波磁动势:
发生故障后,产生的基波磁动势:
由故障前后基波磁动势应相等,解得:
则D,E,F电流重构:
同理,当ABC绕组和DEF绕组中各有一相发生故障时,以A相和D相发生缺相为例进行说明,A,B,C,D,E,F相电流重构:
对于双Y移30°的六相电机来说,其在运行过程中发生缺一相故障的只有一种类型;缺两相的故障类型有四种,分别为相邻两相差30°(如EB两相缺失),相邻两相差90°(如BD两相缺失),相邻两相差120°(如BA两相缺失),相邻两相差150°(如BF两相缺失);缺三相的故障类型有四种,分别为不相邻三相即互差120°(如ABC三相缺失);相邻三相(如AFC三相缺失);相邻两相差30°、不相邻一相(如DFC三相缺失);相邻两相差90°、不相邻一相(如AFB三相缺失)。在实际运行中出现缺一相故障的概率为 10.85%,两相同时发生故障且故障相为相邻两相差120°的概率为0.22%,同时出现缺三相及以上的概率为0.0166%。因此研究缺一相及两套绕组各缺一相的情况是很有必要的。
3.2 仿真分析
电机在正常工作下、D相缺相以及采用容错控制时,转矩波形如图8~图10所示。由图8~图10可知,电机在输入额定电流情况下,输出转矩比较平稳,转矩波动很小;当D相发生故障后,转矩波动增大,平均输出转矩有所下降;当采用容错控制策略后,转矩波动明显减小。
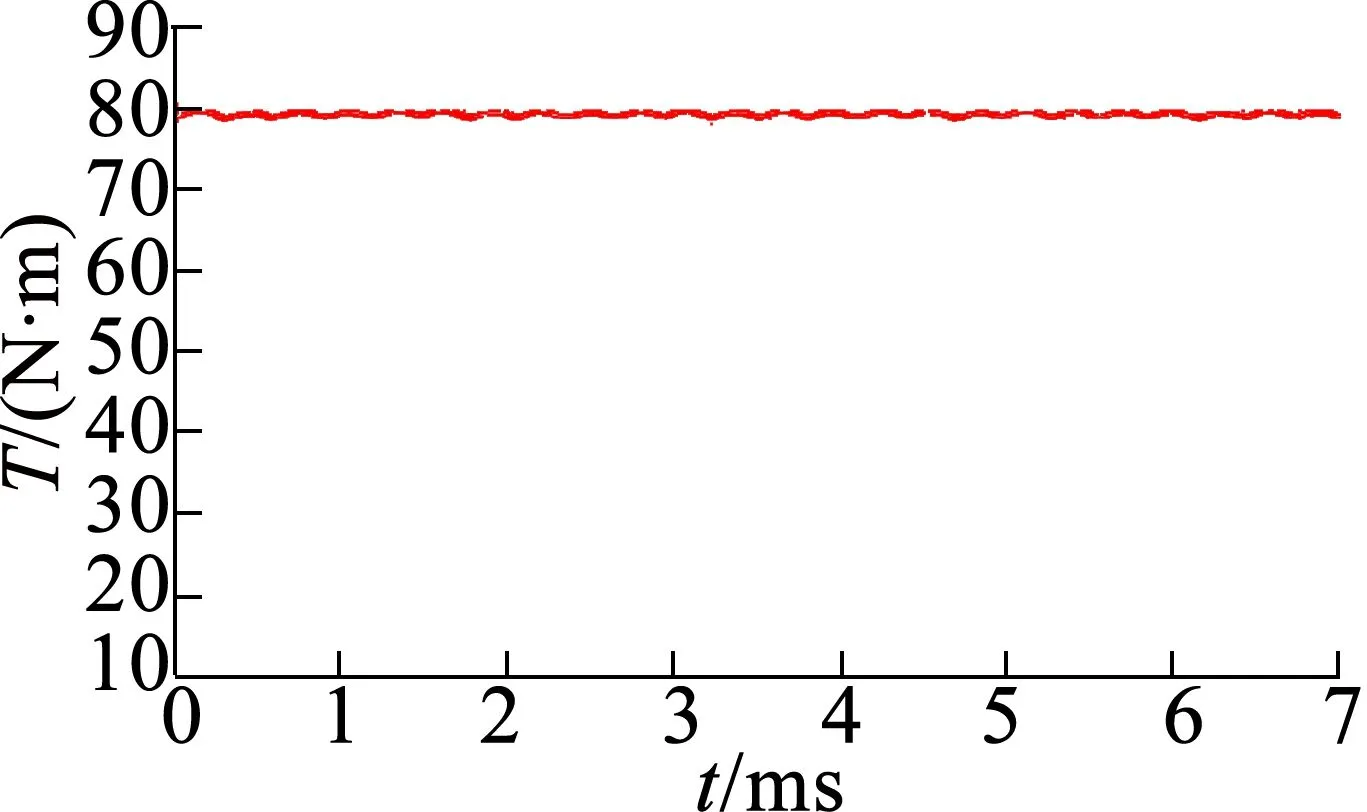
图8 正常工作时转矩波形
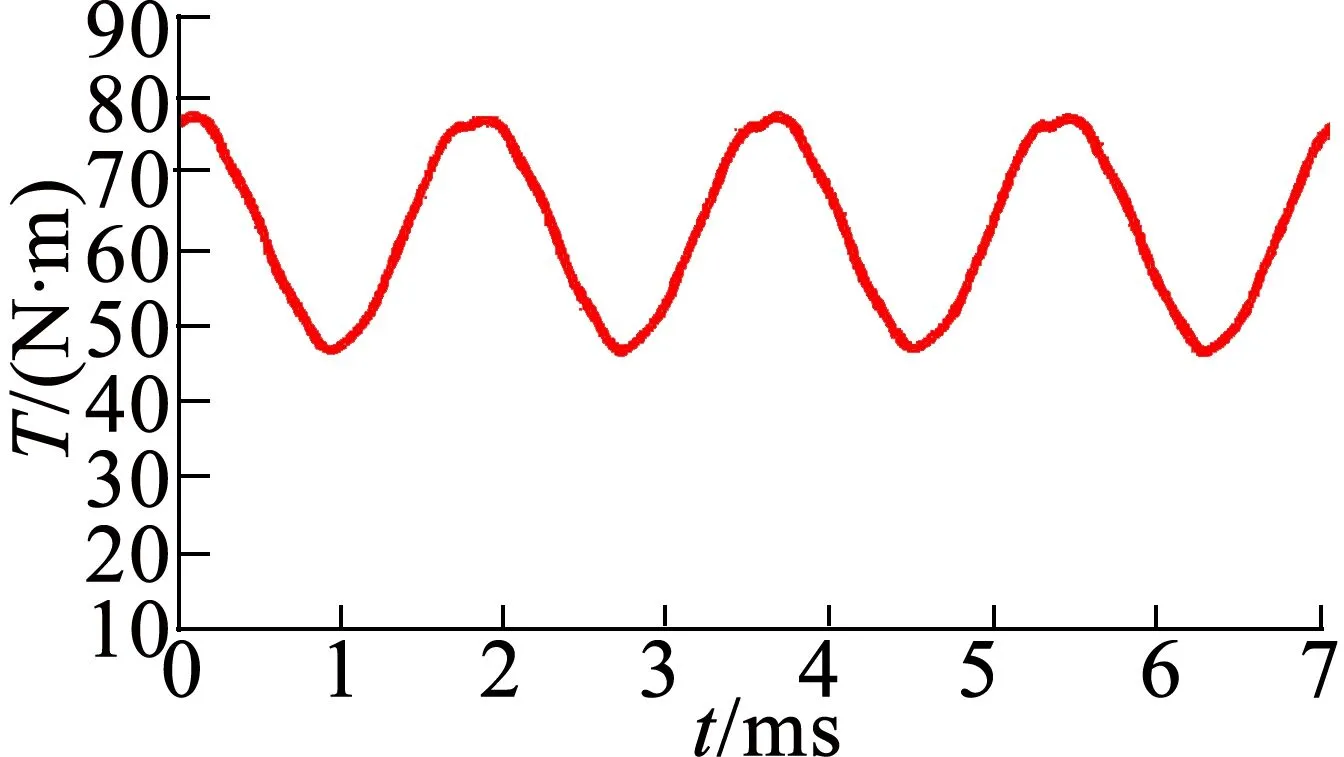
图9 D相缺相时转矩波形
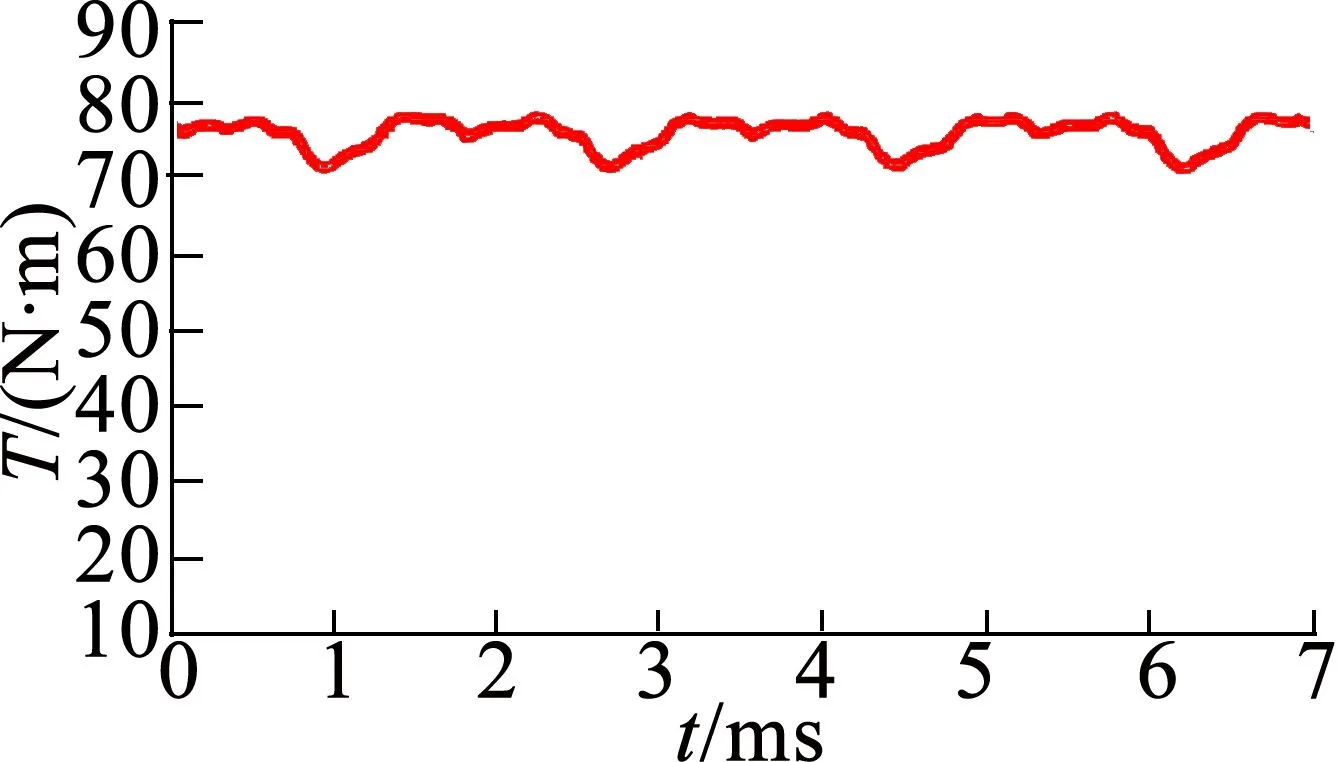
图10 采取容错控制时转矩波形
4 结 语
本文根据性能指标要求,设计了一种电动车用六相永磁同步容错电机,其具有可靠性和容错性高,转矩波动小等优点。通过有限元软件Ansoft Maxwell,仿真分析了所设计电机的空载反电动势波形、空载齿槽转矩、负载转矩等数据波形,验证了设计的合理性。研究了电机在发生一相绕组缺相故障和两相绕组缺相时的容错控制策略,不采用容错控制策略时转矩波动增大,电机无法正常工作;当采用容错控制策略时,转矩波动明显降低,并保持了较好的转矩性能,从而验证了容错策略的有效性,大大提高了系统的效率。
