PLL与ADRC在PMSM中的应用研究
2019-02-25高军礼张小花
唐 亚,高军礼,张小花
(1.广东工业大学,广州 510006; 2.仲恺农业工程学院,广州 510225)
0 引 言
随着《中国制造2025》的到来,具有高力矩惯量比、高效率特点的永磁同步电机(以下简称PMSM)在数控、汽车和机器人等行业得到了广泛的应用。

在PMSM的矢量控制系统中,转速环和电流环常采用PI调节器。PI调节器结构简单,稳定性好,但其参数鲁棒性不能满足速度范围广、速度响应快、稳态精度高的要求[3]。为了实现PMSM的高性能控制,文献[4-6]提出了一种基于自抗扰控制(以下简称ADRC)的PMSM控制系统。与传统PI控制器相比,ADRC同时实现了高速响应和高稳态精度[7-8]。ADRC的扩张状态观测器能够同时观测出系统的状态变量和扰动,通过添加补偿可以消除这些扰动,显著降低了系统参数变化和负载扰动对系统带来的影响。
本文探讨了锁相环(以下简称PLL)技术和ADRC在PMSM矢量控制系统中的应用。利用PLL观测电机的转速,能够有效改善编码器测速相位滞后的缺点;电机的转速环和电流环采用ADRC,弥补了PI调节器的不足之处,实现了“大误差,小增益;小误差,大增益”的非线性控制,能够实现对速度指令和电流指令的精确跟踪。最后通过MATLAB仿真和实验证明了本方法的正确性。
1 基于状态观测器的速度估计
在电机控制系统的设计中,观测器可以用来扩展或者代替系统中传感器的作用。通过综合测得的反馈信号和被控对象的信息,观测器就能完成相应的观测输出。
一个PLL系统由环路滤波器,鉴相器和压控震荡器这3个部分组成。PLL的环路滤波器有RC积分滤波,比例-积分等几种形式,PLL工作原理如图1所示,环路滤波器采用比例-积分的形式。
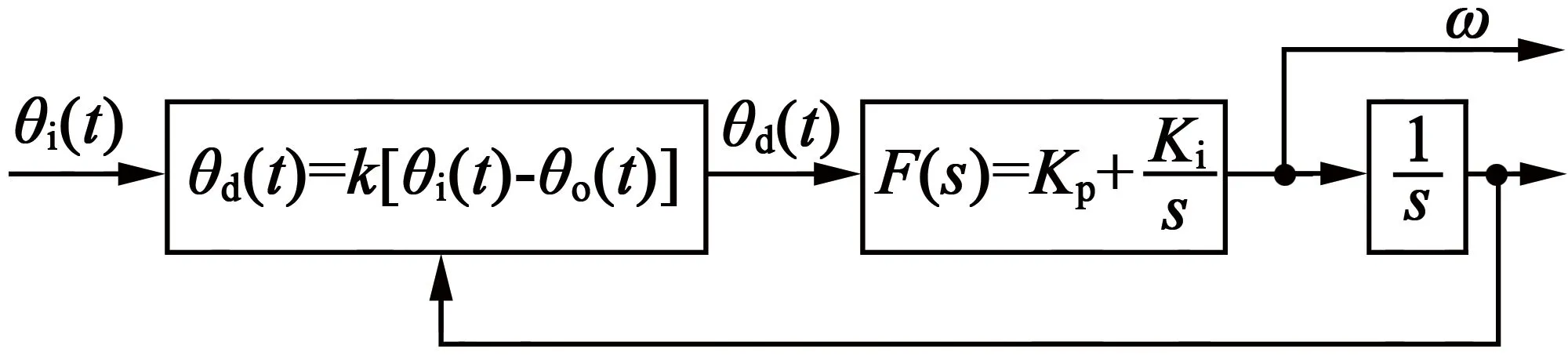
图1 PLL结构框图
电机机械方程:
(1)
式中:ωrm为机械速度;Te,TL分别为电磁转矩和机械转矩;J为转动惯量;B为摩擦和粘滞系数。
工程上粘滞摩擦系数B常设为0;在较小的采样周期内,负载转矩变化较小,可令dTL/dt=0; 在匀速阶段Te与TL相等。由式(1)可以推出状态方程:
(2)
可以列出位置、速度和转矩的观测器方程:
(3)
根据PLL理论,上述观测器方程可以表示:
(4)
还可以用框图来进一步描述,如图2所示。PLL观测器的输入为转子的实际位置和观测位置,输出为

图2 转速观测器控制框图
转子的速度和位置的观测值。
式(3)的特征方程:
det[sI-(A-LC)]=s2+l1s+l2(5)
欲使系统保持稳定,则系统的特征方程的根必须具有负的实部,参考文献[9]中的极点配置的方法,选择合适的极点,令s2+l1s+l2=(s+ω0)2,可以确定l1和l2的值,ω0是状态观测器的带宽,一般取ω0=fs/10,fs为系统的控制频率。
2 基于ADRC的PMSM控制系统
N阶ADRC控制系统结构框图[10-11]如图3所示。跟踪微分器(TD)用来提取给定信号和其微分信号,进一步安排系统的过渡过程,实现指令的快速跟踪。扩张状态观测器(以下简称ESO)是ADRC的关键所在,利用状态观测器的思想,将系统的内部扰动和外部扰动扩张成新的状态变量,并且不依赖系统的模型就能得到估计值。非线性反馈控制律(NLSEF)不仅可以产生类似PID的线性控制组合,还可以产生非线性控制组合,达到快速调节的效果。

图3 ADRC的组成
在实际应用中,韩京清研究员提出的ADRC采用非线性函数,参数多达12个,调节起来十分复杂,实现难度大。在文献[9]中,高志强博士将ADRC的参数整定与系统的带宽相结合,推导出了线性ADRC,便于工程应用。因此,本文将采用一阶线性ADRC来设计转速环和电流环。
PMSM在d-q旋转坐标系下的微分方程:
(6)
式(6)中,在电机的d-q轴电流环之间存在着交叉耦合项,传统的按照电机数学模型解耦的方法会由于参数的不准确导致解耦不彻底,根据ADRC的工作原理,可以将耦合的部分作为系统的内部扰动;此外,电源扰动和负载转矩扰动是电机控制中两种常见的外部扰动。利用ADRC中的ESO,能观测出系统的内扰和外扰,然后再将扰动量补偿到控制系统。因此,可以令:
(7)
则可以得出:
(8)
在线性情况下二阶ESO方程变为:
(9)
一阶线性ADRC的结构图如图4所示。线性组合u0=kp(r-z1);控制量u=(u0-z2)/b0。

图4 一阶线性ADRC结构

3 仿真及实验
采用编码器作为位置传感器,在MATLAB/Simu-link平台上,构建的电机矢量控制系统的结构框图如图5所示。所选电机的电气参数如表1所示,进行仿真与同条件下的实验研究。

图5 电机矢量控制系统框图

参数数值参数数值输入DC电压U/V24转子磁链φ/Wb3.5×10-3额定功率PN/kW0.064定子电感Ls/mH0.34额定转速nN/(r·min-1)3 000定子电阻R/Ω0.62额定电流IN/A3编码器线数1 000极对数p7
3.1 仿真研究
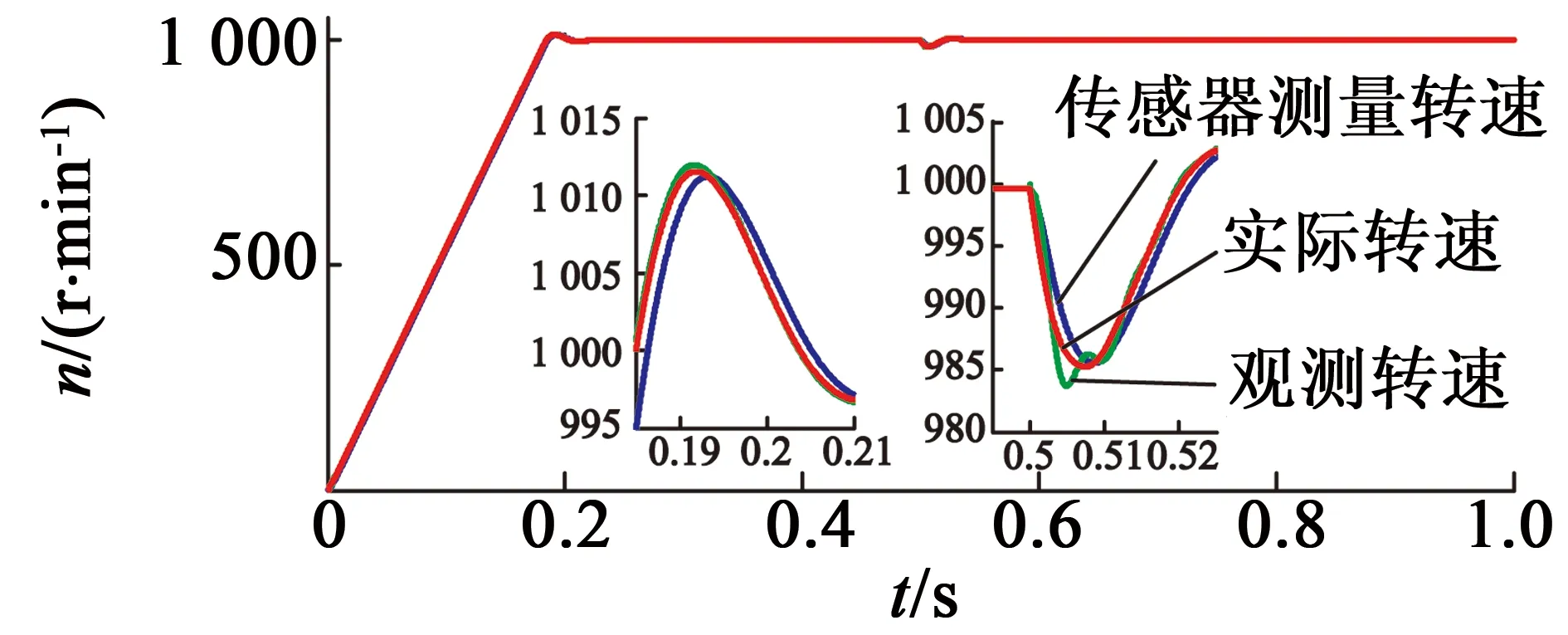
图6 带载情况下转速观测
将采用ADRC技术设计的电流环与转速环与通过极点配置法整定参数的电流环和转速环PI调节器进行仿真对比,如图7所示。转速设定为1 000 r/min,0.5 s加入0.3 N·m负载转矩。ADRC稳定时间约为0.01 s,超调量比PI控制器少30%;PI控制器在调节时间与超调量之间却难以平衡。加入扰动后,自抗扰控制器的转速跌落约为15 r/min,恢复时间约0.02 s。由于自抗扰控制器能够补偿扰动,实现d-q轴电流环的完全解耦,能获得正弦度更好的相电流。
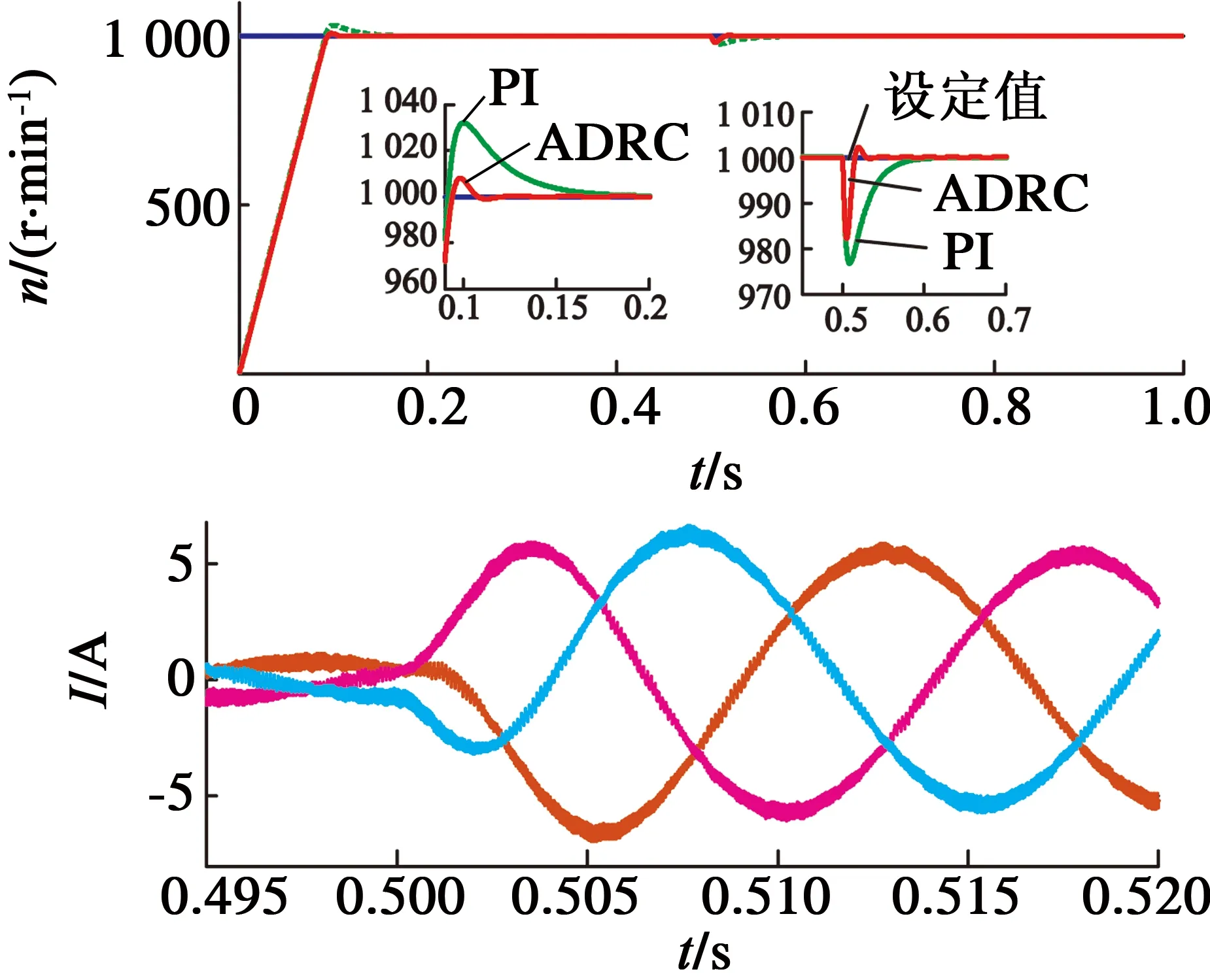
(a) ADRC

(b) PI
3.2 实验研究
电机的测试平台由可调负载、PMSM和转矩传感器组成,电机和负载通过连轴器相连。控制算法全部在STM32F405RG微控制器上完成,三相桥采用DRV8301作为驱动芯片。PWM的开关频率设定为8 kHz,电流环调节器每125 μs执行一次,转速环调节器每2 ms执行一次。电机参数如表1中所示。
转速给定为100r/min,500r/min,1000 r/min;首先用J-Scope上位软件,获得电机的转速信息,然后在MATLAB中绘制出来。利用PLL观测得到的电机速度如图8所示,在不同速度段,PLL都能较好地观测转速信息。

图8 PLL转速观测试验
转速设定为1 000 r/min,在6 s时加入外部扰动,然后再将转速设定为500 r/min。图9(a)为采用ADRC设计双环时的转速跟踪效果,图9(b)为采用PI调节器的效果图。从图9中可以看出,在稳定时间差不多的情况下,采用ADRC时,几乎没有超调,PI控制器的超调达到了15%;加入扰动后,ADRC转速变化为±20 r/min,PI控制器的转速变化达到了±50 r/min。可以看出,基于ADRC设计的系统稳定性高、硬度好。
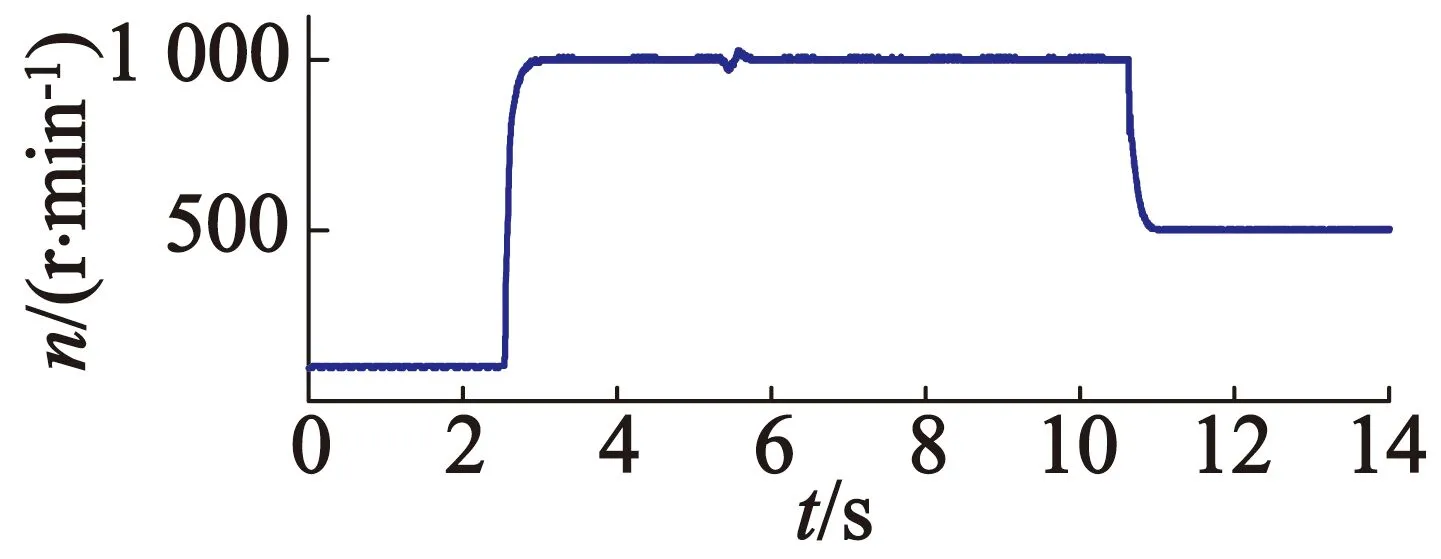
(a) ADRC

(b) PI
图9转速跟踪对比实验
加入0.3 N·m负载转矩,电机的三相电流波形如图10所示。由ADRC实现的解耦控制,补偿了实时扰动,相电流的正弦度较好。
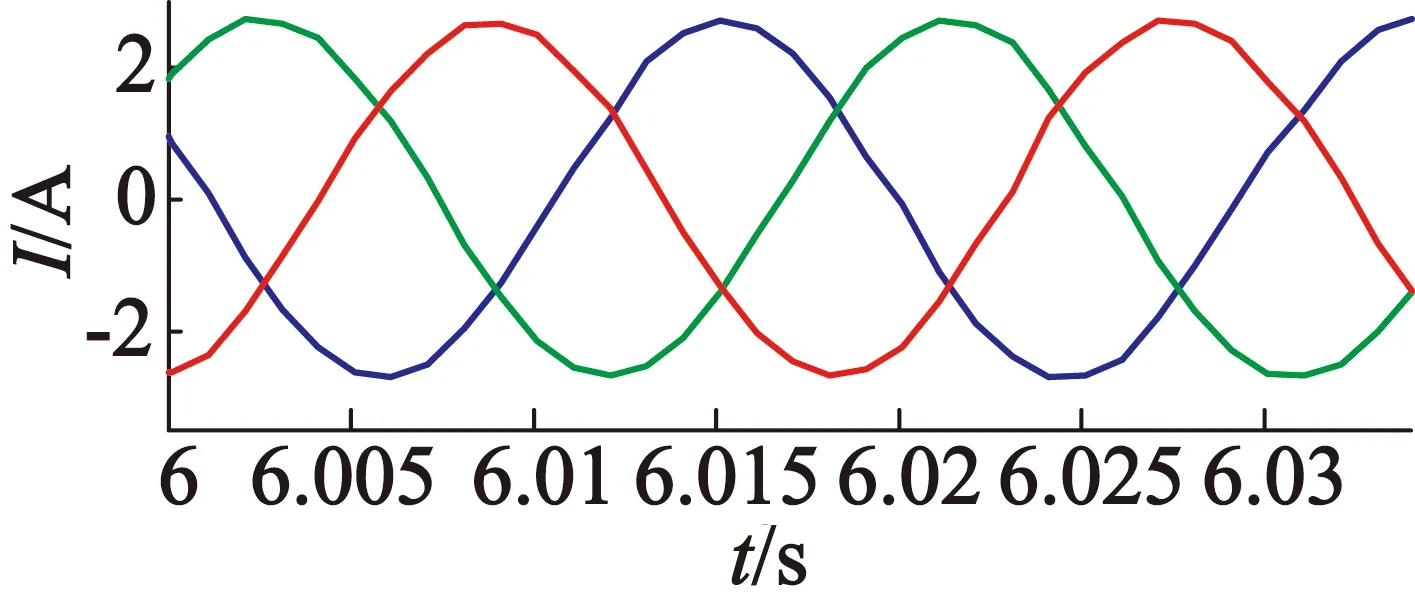
(a) ADRC

(b) PI
图10加入负载后三相电流波形
4 结 语
采用编码器作为PMSM控制系统的位置传感器时,PLL技术能够较好地观测电机的转速,克服了经位置差分测速时带来的相位滞后的缺点,并且本文给出了PLL参数选取的方法。采用ADRC设计的电流环和转速环,在不同的给定转速下,都有较高的跟踪精度,且能够对系统的内部扰动和外部扰动进行观测并加以抑制,使得电机相电流的正弦度更好,提升了系统的抗扰动能力和适应能力。仿真和实验结果表明了上述研究的合理性与正确性。
