基于SPC1068的步进电动机可控转矩矢量控制
2019-02-25吕常智
吕常智,韩 鲁
(山东科技大学,青岛 266590)
0 引 言
步进电动机的工作原理是将电信号转化为角位置。电机转速及转子位置,只与脉冲频率和数量相关[1]。随着步进电动机工作环境复杂化,电机低速振荡和失步问题更加突出。对于电机振荡和失步问题,国内外学者的研究主要集中在细分电流控制[2-8]和电机速度轨迹控制[9-12]两方面。在特定的场合下,电机低频振荡和失步问题得到有效抑制。
步进电动机振荡和失步现象可通过控制转矩得到解决。通过矢量控制能对步进电动机转矩进行有效控制,是步进电动机高性能控制的重要手段[13-16]。本文以高性能控制芯片SPC1068为基础,设计一款高效稳定的电机转矩控制系统。利用转矩矢量控制方法,在已知所需转矩的情况下,通过控制芯片直接计算获得最优矢量电流,摆脱传统查表电流的获取,提高了电机转矩可控性和实时性,优化了电流控制效率。在步进电动机矢量控制闭环系统中,主控芯片进行转矩计算获得最优矢量电流,经矢量控制和PWM控制对电机施加绕组电压。通过增量式旋转编码器将转子位置实时反馈给控制芯片,实现对电机转矩、电流的闭环控制。仿真实验证明,系统能实现对电机转矩的有效控制,且具有较高的动态稳定性。
1 两相混合式步进电动机转矩矢量控制
转矩矢量控制是对电机定子绕组电流的相位和大小进行控制。将定子两相绕组电流进行坐标变换,得交、直轴电流。通过控制交、直轴电流的相位和大小,实现对电机转矩的有效控制。
对定子绕组电流ia,ib进行坐标变换,可得d,q轴上电流id,iq,如下:
(1)
利用磁共能得电机电磁转矩表达式:

pImMsr(-iasinθ+ibcosθ) (2)
式中:p为电机转子齿个数;Im为永磁体等效励磁电流;L2为电机绕组自感的基波分量;Msr为定转子间等效互感。
将式(1)代入式(2)中可得:
Tm=-2pL2idiq+pImMsriq(3)
取d,q轴电感:
(4)
式中:L0为电机绕组自感的平均分量。将式(4)代入式(2)得到:
Tm=p(Ld-Lq)idiq+pImMsriq(5)
式(5)为两相混合式步进电动机电磁转矩表达式。在已知交、直轴电流时,可得电机电磁转矩值。Tm是由磁阻效应产生的磁阻转矩和主电磁转矩共同作用得到。通过控制定子交、直轴电流大小和相位来对电磁转矩进行控制。
由式(5)可知,在已知电磁转矩的情况下,交、直轴电流组合有多种形式。在转矩达到的同时,如何将电能效率达到最优,是未来电机控制发展的重要方向。

(6)

(7)
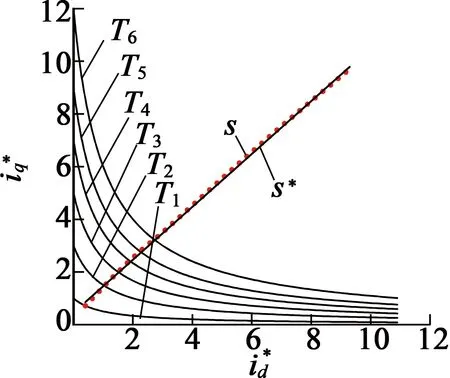
图1恒转矩曲线与最优转矩曲线
将式(7)与式(6)联立,得到所需转矩值的交、直轴最优电流:
(8)

采用最优转矩/电流控制策略时,混合式步进电动机的定子电流需要满足:
图2为细分矢量图。控制电流是非线性的,实时计算出每1 ms的d,q轴电流计算量又过于庞大,不符合目前的现实情况。通过参考细分电流的方法,将每一象限均匀地分成n等份,然后取每一等份中的中间矢量作为d,q轴所在区域标准矢量。
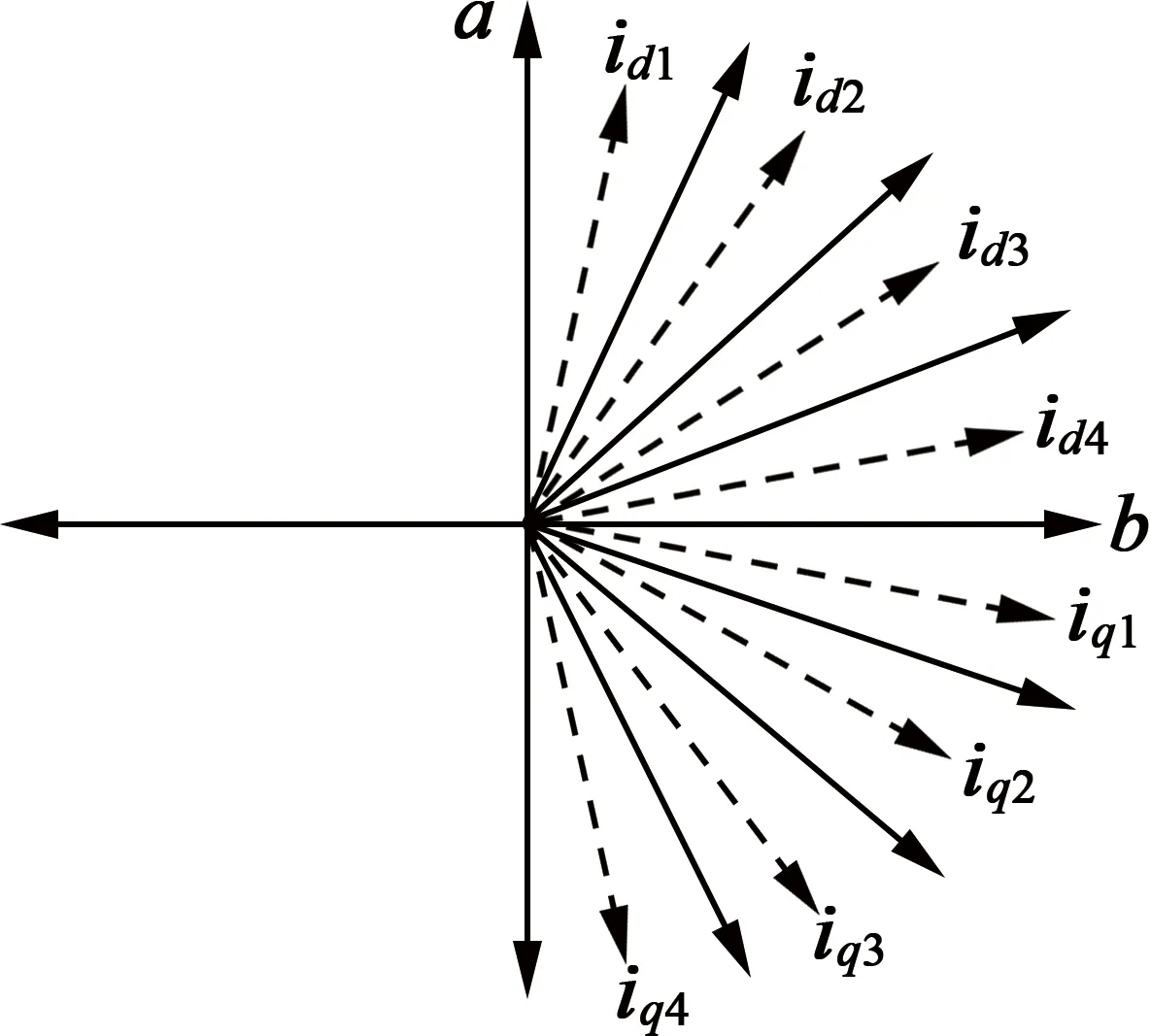
图2细分矢量图
在得到交、直轴电流值以及转子位置角度,通过矢量反变换得到转子绕组电流ia,ib值,如下式:
(10)
增量式旋转编码器可实时、准确地获得电机转子位置角度信息。步进电动机通过矢量细分角度可以有效地控制电机的转矩稳定输出,使步进电动机运行平稳。
2 步进电动机矢量控制的实现
本文使用SPC1068作为主控芯片,它是基于ARM Cortex-M3为内核的32位微控制器,最高支持150 MHz CPU主频和零等待状态。相对于其他的ARM系列的芯片,SPC1068更适合电机产品的开发,14路PWM输出,7组互补PWM。专为电机/电源设计的PWM与ADC连动功能,支持PWM周期内任一时点触发采样 。16通道(16组单端,8组差分输入),最高4×106Hz采样速率,拥有2个Sample/Hold电路,支持同步瞬间采样。
图3是两相混合式步进电动机可控转矩矢量控制原理图。将所需的电机转矩值输入到SPC1068中,通过式(8)、式(9),可得交、直轴电流的最优估计值。
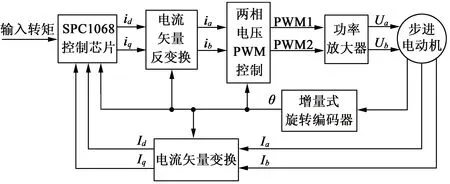
图3步进电动机可控转矩矢量控制系统图
将获得的最优交、直电流进行电流矢量反变换,得电机a,b相绕组电流。对两相电压进行PWM控制,输出脉冲宽度不同的相电压Ua,Ub到电机绕组。增量式旋转编码器能将电机转子位置角度实时、准确地反馈给控制系统。同时电机绕组的反馈电流Ia,Ib,经过矢量变换得到反馈交、直电流Id,Iq,反馈到SPC1068控制器与估计矢量电流进行比较,实现对电机转矩、电流的精确控制和实时监控。
3 仿真实验
在不考虑定子极间与端部中的漏磁、永磁体回路的漏磁、磁滞、涡流以及饱和等情况下,得到两相混合式步进电动机的电压平衡方程:
2L2[iasin(2θ)-ibcos(2θ)]-kmωsinθ(11)
2L2[iasin(2θ)+ibcos(2θ)]+kmωsinθ(12)
式中:km为永磁体内部磁压降系数。
电磁转矩方程:
(13)
由式(11)~式(13)可得电机数学方程的微分形式:
(14)
由式(2)、式(14),建立两相混合式步进电动机电机数学模型。输入量为电机绕组a,b相电压和负载转矩,输出量为步进电动机绕组电流、电磁转矩、角速度以及角位移。
图4为步进电动机转矩矢量控制系统仿真图,向SPC1068中输入所需转矩,计算得到达到转矩所需要的最优矢量电流值。经过矢量控制和PWM电流控制,获得电机绕组电压,实现对电机的转矩、转速控制。电机将转子角度位置及绕组电流值反馈给控制系统,控制芯片对反馈矢量电流和估计矢量电流进行比较,调节矢量电流的输出。

图4步进电动机转矩矢量控制系统仿真图
进行Simulink仿真实验,模拟电机低频突加速工作状态。初始转矩值设定为7 N·m,2.5 s后将转矩值设定为15 N·m,负载设置为6 N·m。仿真结果如图5~图9所示。

图5电机绕组电流图
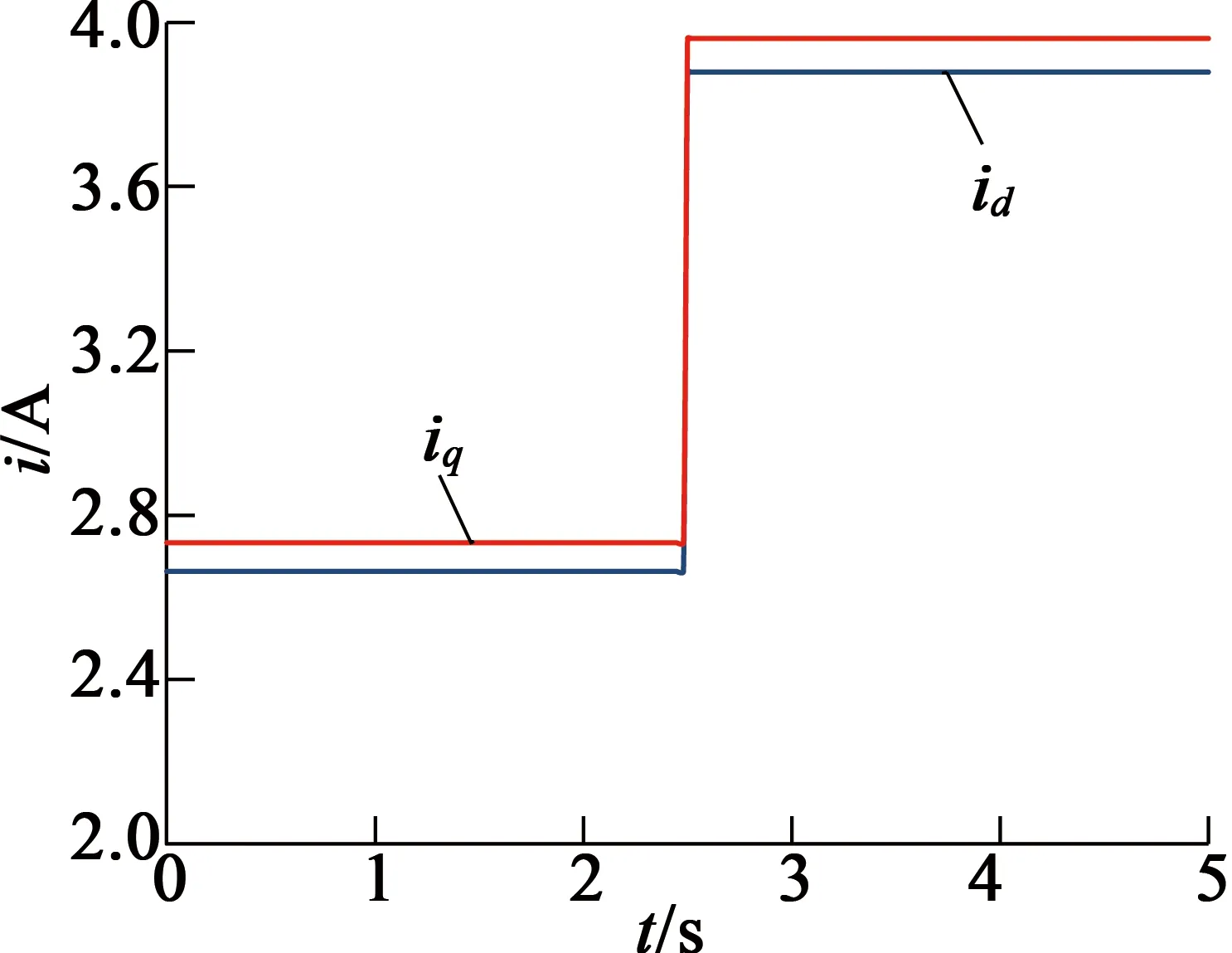
图6交、直电流优化值仿真图

图7电机转矩仿真图

图8电机转速仿真值图

图9电机转子位置仿真图
由图5、图6可看出,电机绕组电流响应稳定,在突加转矩后,系统调节时间短,能迅速达到稳定正弦波状态。控制芯片能准确计算出达到预期转矩的交、直轴电流最优值。由图7可知,电机转矩输出准确,在突加转矩后,系统经过短暂调节,能迅速达到预期输出转矩的稳定状态,保证了电机转矩输出可控的准确度。由图8、图9可知,电机低转速运行平稳,在突加速状态下,转速响应迅速、无振荡过冲。电机转子的位置角度呈线性化,有效改善了电机低频振荡和失步问题。
4 结 语
仿真结果显示,基于高性能SPC1068的可控转矩矢量控制系统下的步进电动机输出转矩响应迅速稳定。通过控制电流实现了对电机转矩的直接控制,有效地解决了电机低频振荡和失步问题。在大范围改变电机输出转矩的工作状况下,电机转矩、转速能在较短的时间内达到预期稳态。通过对转矩的控制,还可以实现电机加速、匀速和减速各种工作状态的控制,并且由SPC1068控制芯片组成的硬件电路结构简单,成本较低,能够满足多种场合下的工作应用要求。
