船-冰碰撞载荷时间历程的模型试验研究
2019-02-22马高强孙剑桥
黄 焱, 马高强, 孙剑桥
(天津大学 水利工程仿真与安全国家重点实验室,天津 300350)
随着近年来北极航道的开通,以及极地地区铁、镍、油气等矿产资源开发的日趋频繁,船舶航行于极地海域的频率日益增加,同时,由船-冰碰撞所导致的船体结构损伤的风险也日益突出。为了保障极地地区生命、财产与环境的安全,世界多国通力协作,致力于极地海域船舶操作规范的标准化,由此促成了国际船级社协会(IACS)《极地船级规范》的颁布。极地船级规范在综合考虑多种船-冰相互作用情形的基础上,将船首与巨型浮冰的碰擦作用(Glancing impact)作为船体外板强度设计的控制载荷情形,并通过理论分析构建了基于“压力-面积关系”(Pressure-Area Relationship)的碰撞载荷评估方法[1-2]。
然而,现行极地船级规范仍主要从静态极限强度角度考察设计的有效性,缺乏对碰撞过程非线性时变特征的描述。事实上,船-冰碰撞载荷具有突出的瞬时突变特征与空间分布多变特征,这是因为在这一作用过程中包含船体与冰体运动状态的改变、船体的变形及冰体的变形与破坏多种物理进程的耦合。显然,船-冰碰撞载荷具有显著的非线性动力特征,因此,对于高等级极地船舶的设计来说,仅进行局部静态极限强度设计是远远不能满足现实需求的。
针对船-冰碰撞载荷时间历程的描述,国际上已发表的实船测试工作中早有涉及,但早期的研究大多将考察重点集中在冰载荷与作用长度[3-4]或作用面积[5-6]的关系上,而并未对其时变特征进行详细分析。Lee等[7]在总结前人对波浪砰击载荷作用特征的研究的基础上,对Araon号极地科考船监测到的冰载荷数据进行分析,并指出了部分载荷的加载或卸载阶段中间峰值(Intermediate peak)的存在。然而,Lee等所依据的实船测试数据仅针对约1 m厚度的浮冰,与IACS极地船级规范所要求的巨型浮冰(如PC3级的船舶,其强度设计的浮冰厚度为5 m)仍存在很大差异。事实上,出于船体结构安全性的考虑,现有实船测试所针对的冰条件均远未达到规范所要求的水平。
国内对于船-冰碰撞载荷的研究起步较晚。王健伟等[8]采用非线性有限元法对船-冰碰撞进行数值模拟,得到了船舶初速度、冰层厚度等因素对船-冰碰撞载荷的影响。刘瀛昊等[9]根据SA Agulhas Ⅱ号极地科考补给船在南极海域的原型测量数据,利用影响系数矩阵法和反演法对船体尾肩部的冰载荷进行了分析。
当现场监测数据无法作为船舶设计的支撑依据时,依据模型试验结果作为技术支撑是最为可靠的方法。本文即采用室内冰水池物理模型试验的方法,对船体与巨型浮冰的碰撞过程进行模拟,并以船体首部整体覆盖触觉传感器的方式,形成对船体表面冰压力的直接测量。在此基础上,重点对船-冰碰撞载荷的时变特征进行考察。
1 模型试验概述
1.1 试验设施
本文所进行的模型试验测试工作是在天津大学冰力学与冰工程实验室(见图1)内完成的。天津大学冰力学与冰工程实验室是天津大学国家重点实验室的重要组成部分,实验室低温空间面积达320 m2,用于容纳冰水池进行模型试验,冰水池长40 m,宽6 m,深2 m,制冰能力为1~30 cm。试验主拖车的最大水平驱动力为5 t,拖车车速可在0.001~1.000 m/s内无级调节,也可在既定的速度下恒速行驶。

图1 天津大学冰力学与冰工程实验室冰水池Fig.1 The ice tank of Tianjin University
1.2 相似准则及试验模型
弗劳德和柯西相似准则是冰水池模型试验中所遵循的主要相似准则,适用于大多数冰与结构相互作用情形。在本文针对的船-冰碰撞情形中,船体以一定质量和速度撞击浮冰,即惯性力的作用占主导地位,因此需遵循弗劳德准则;浮冰受到船体撞击后发生挤压和弯曲变形,即重力和弹性力的作用占主导地位,因此需遵循柯西准则。上述二种相似准则被国内外大多数冰水池采用[10-12],并已写入最新版的国际拖曳水池会议ITTC的冰水池试验技术规程中[13]。
在模型与原型同时满足弗劳德数和柯西数相等的情况下,可得到模型条件下的冰强度、冰厚、冰弹性模量和压力的比尺为模型几何缩尺比λ,时间和速度的模型比尺为λ1/2,质量和力的模型比尺为λ3。
模型试验针对我国新一代极地科考船“雪龙2”号(见图2)展开,其船体的结构强度满足极地船级PC3等级的要求,船体的主要几何参数,如表1所示。试验中,船模大小采用1∶40的缩尺比进行缩尺,外形则与实船保持一致。船模采用硬质木材加工,船模表面可近似为刚体。

图2 我国新一代极地科考船“雪龙2”号Fig.2 The polar research vessel Xuelong 2
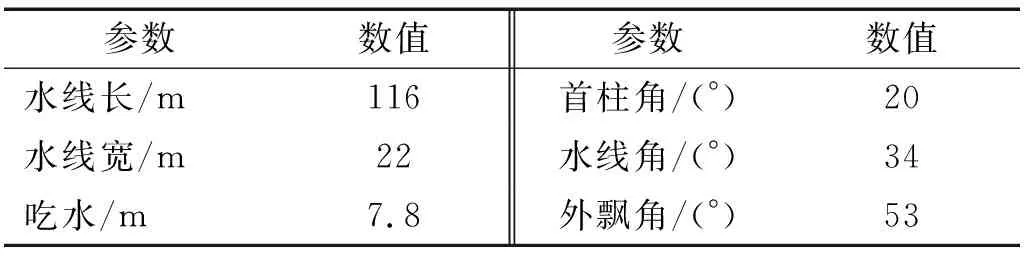
参数数值参数数值水线长/m116首柱角/(°)20水线宽/m22水线角/(°)34吃水/m7.8外飘角/(°)53
1.3 模型冰
试验中的模型冰采用的是国际第二代低温模型冰—尿素冰。模型冰中所含尿素类似于原型海冰中的盐水泡,可促使冰融化,从而加大孔隙率,降低冰强度,以更好地满足模型比尺的要求。室内生成的模型冰在晶格方向、生长过程上均与北极地区海冰保持一致,进而可以在冰的变形与破坏模式、冰载荷特征等关键性问题的模拟上与现实情况保持高度的相似性,如图3所示。
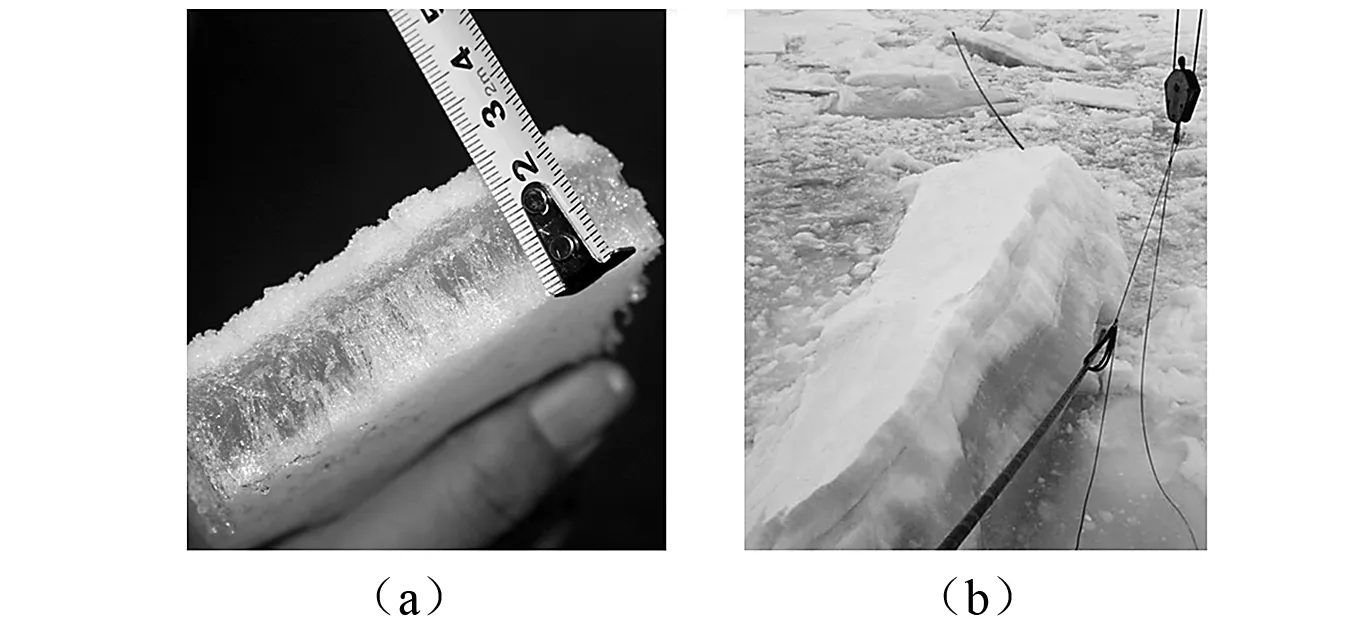
图3 模型冰断面与天然海冰结构对比图Fig.3 Comparison of the model ice and natural sea ice
如上所述,本文所针对的新型极地科考船满足PC3等级的结构强度要求。根据IACS极地船级规范,PC3等级的极地船级要求所对应的冰况为二年冰,其与当年冰最为显著的差异,便是其较高的冰厚和冰强度。鉴于规范技术背景中将浮冰边缘的弯曲破坏作为冰体最终的破坏形式,同时在冰载荷计算中将浮冰的弯曲破坏力作为挤压破坏力的上限,因此试验中采用弯曲强度作为冰强度的指标。此外,现实情况下,海冰的挤压强度σc与弯曲强度σf呈现一定的比例关系(σc/σf=0.5~5.0)[14],而试验中制备的模型冰的强度也遵循了这一比例关系(σc/σf=3~4)。因此,试验在对冰弯曲强度进行缩尺时,同时也对冰挤压强度实现了缩尺。根据IACS极地船级规范的技术背景文件,PC3等级所对应的冰厚为5 m,冰弯曲强度为1.2 MPa[15]。与此相对应的模型条件下的冰厚为12.5 cm,冰弯曲强度为30 kPa。
1.4 触觉式传感器测试系统
试验中通过触觉式传感器测试系统对船体表面的冰压力进行直接测量,传感器数据采集窗口如图4所示。传感器由电阻式织物传感单元阵列组成,织物材料柔软,并有120%的延展性,外部包有聚酯型防水薄膜。当传感器在不平整的表面或者弯曲时,传感器不会因为翘曲而出现噪音。传感单元受到压力作用时,即接通电子回路,设备通过计算电阻阻值的变化而得出每个传感单元的压力值。传感器的尺寸为484 mm × 484 mm,几乎覆盖船体首柱至船肩的整个区域,如图5所示。因此可实现对船-冰碰撞过程中冰载荷沿船体表面作用轨迹的完全捕捉与记录。测试区域由1 024个测试单元组成,每一个测试单元尺寸为14.5 mm × 14.5 mm。测试量程具有多种选择,分别为50 psi,100 psi与150 psi(1 psi约为6.89 kPa)。
1.5 试验工况及试验流程
根据IACS极地船级规范的技术背景文件,设计载荷情形下的船-冰碰撞过程为:假定船首碰撞一块具有无穷质量的浮冰的边缘,在碰撞过程中,浮冰边缘受到船体的持续挤压,直到船体沿船-冰接触面法线方向的速度为零、船体弹开为止。由于在现实情况中,巨大的海上浮冰在尺寸与质量上均远大于船体,因此上述过程中对于浮冰具有“无穷质量”且不发生运动状态改变的假设具有一定的现实合理性。
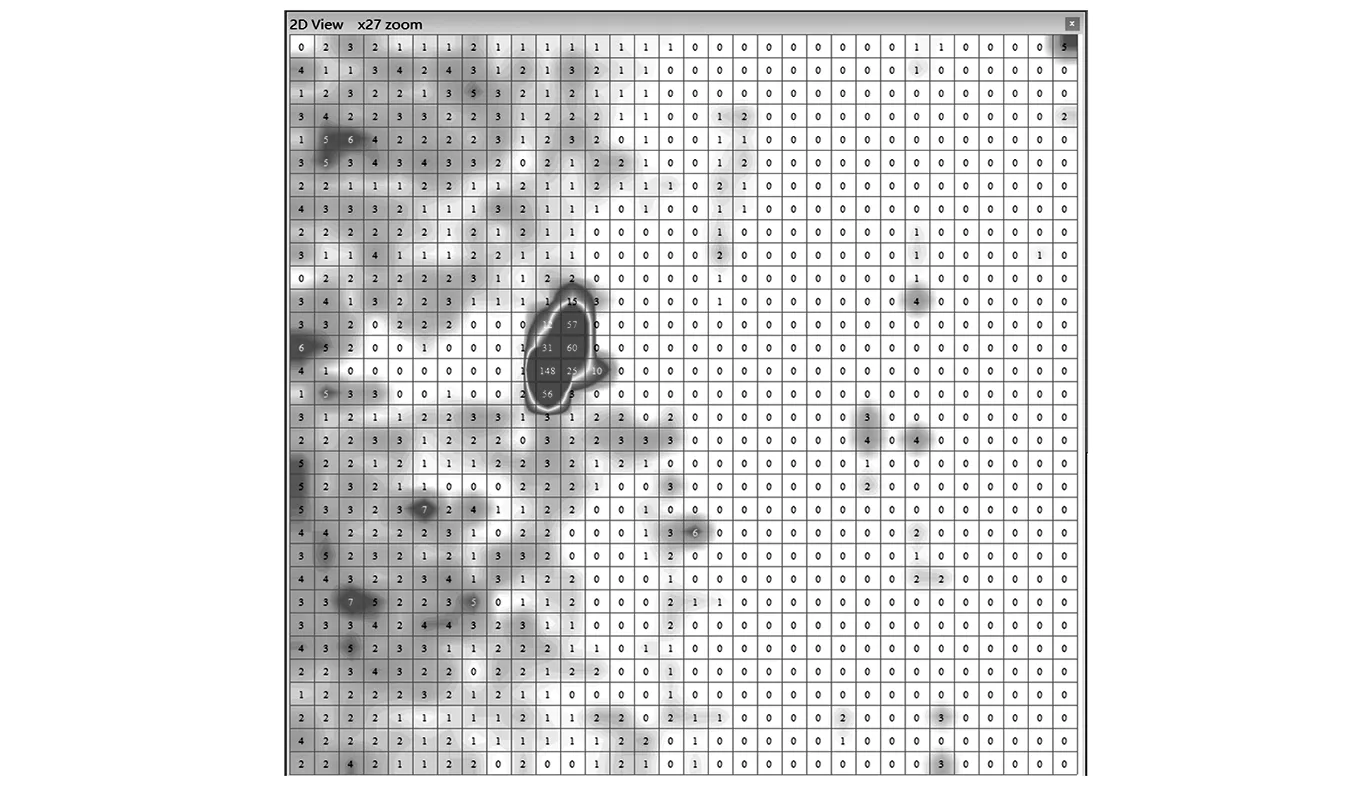
图4 触觉式传感器冰载荷数据采集窗口Fig.4 The data acquisition window of the tactile sensors
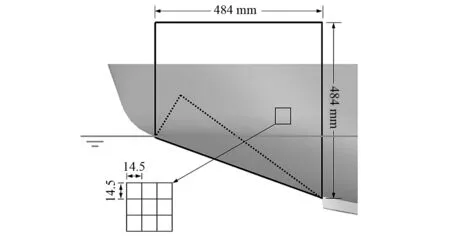
图5 传感器布置示意图Fig.5 Illustration of the arrangement of the tactile sensors
然而,在室内模型试验中,制备所谓的“具有无穷质量的”浮冰体是无法实现的。因此,为合理地模拟碰撞能量在船体与冰体间的转换平衡,前期的准备试验中进行了一系列的探索性试验,对船体和冰体在不同约束条件的组合下(船体固定拖曳或自由牵引,冰体自由漂浮或冻结于水池边壁),碰撞过程的合理性和碰撞载荷的可应用性(即还原至原型后是否能达到规范要求的水平)分别进行了评估,最终确定采用船体固定牵引撞击自由漂浮冰体的模式进行。在此模式下,船体与拖车进行刚性连接,浮冰处在自由漂浮的状态。此模式与规范假定的碰撞模式存在相似之处,即只约束了船体或冰体一方的自由度。因此,此模式下的浮冰体处于自由漂浮的状态,并未有额外的措施来限制其自由度。
同时,为保证试验得到的碰撞载荷水平与规范计算结果保持较高的吻合度,在前期的准备试验中,针对不同的初始撞击位置(见图6)、浮冰质量和浮冰边缘角度进行了试验,最终确定在初始撞击位置在首柱附近区域(即图6中第1个撞击点)、浮冰边缘角度为90°,且浮冰质量在达到1.5倍的船体排水量后,载荷水平基本达到规范的要求。
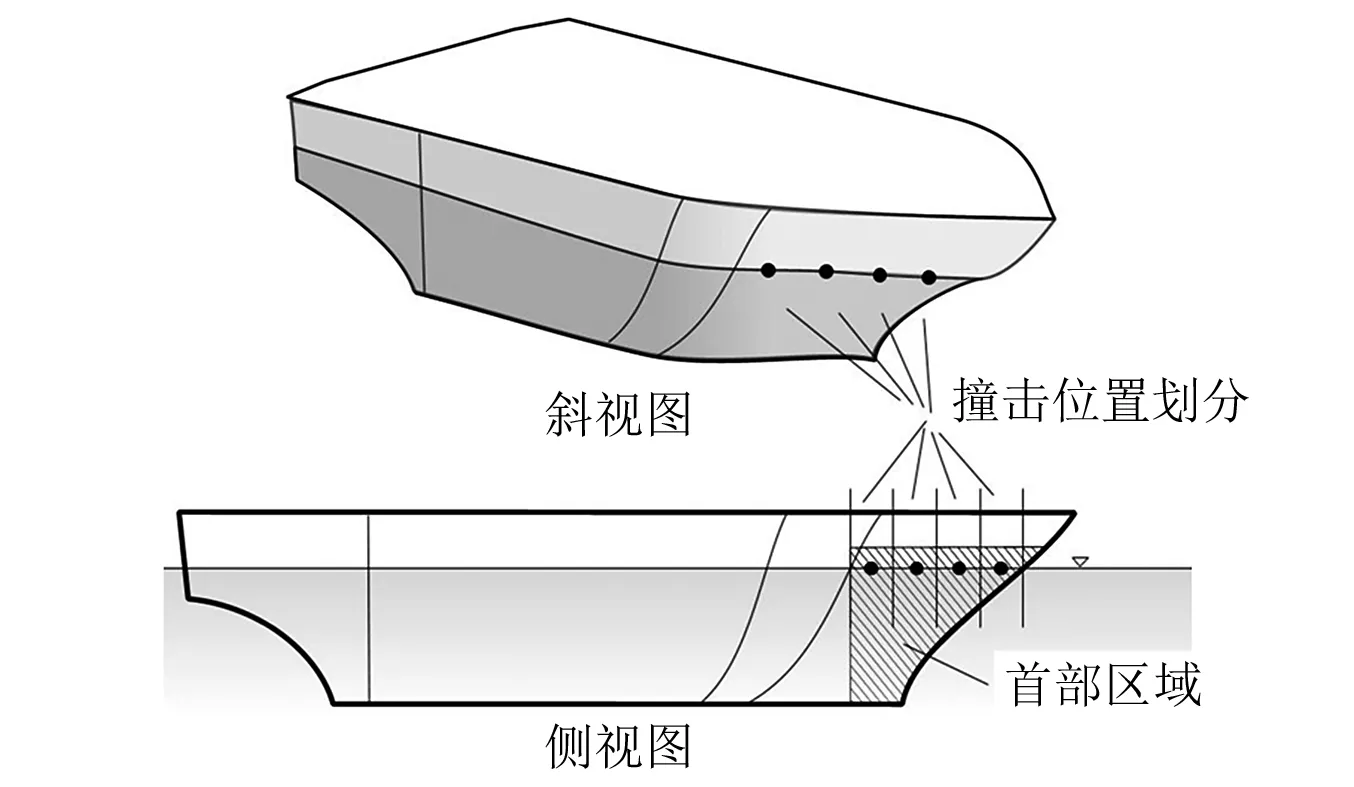
图6 不同撞击位置示意Fig.6 Illustration of the impact locations
试验中船模的拖曳速度为0.553 m/s,其原型航速为3.5 m/s,与规范技术背景文件中PC3等级下的标准设计航速相对应。由于碰撞载荷具有一定的随机性,因此本文在同等条件下共进行了16组次的试验,以保证试验结果的合理性和有效性。
2 基于触觉传感器的碰撞载荷提取
为了将船-冰碰撞区域的冰载荷从整体测试数据中准确的提取出来,首先要进行的便是冰载荷的有效识别。由于在船-冰碰撞过程中,冰压力的作用水平远大于水压力,因此可通过不同测试单元之间的压力水平差异初步判别载荷作用区域,并依此对每个测试单元的原始压力数据进行筛选,最终便可得到船-冰碰撞载荷的作用区域及压力分布,如图7所示。
在对船-冰碰撞载荷形成有效识别后,便可对船-冰碰撞区域上的载荷和有效作用面积进行统计和分析。由于在碰撞过程中,浮冰边缘发生持续的挤压破坏,而在这一破坏过程中往往伴随着碎冰沫的剥落和持续挤出,如图8所示。这一过程造成了有效接触面积,即冰载荷作用面积的减小,同时由于冰破坏的不均匀性,导致接触面内若干高压力区的存在。
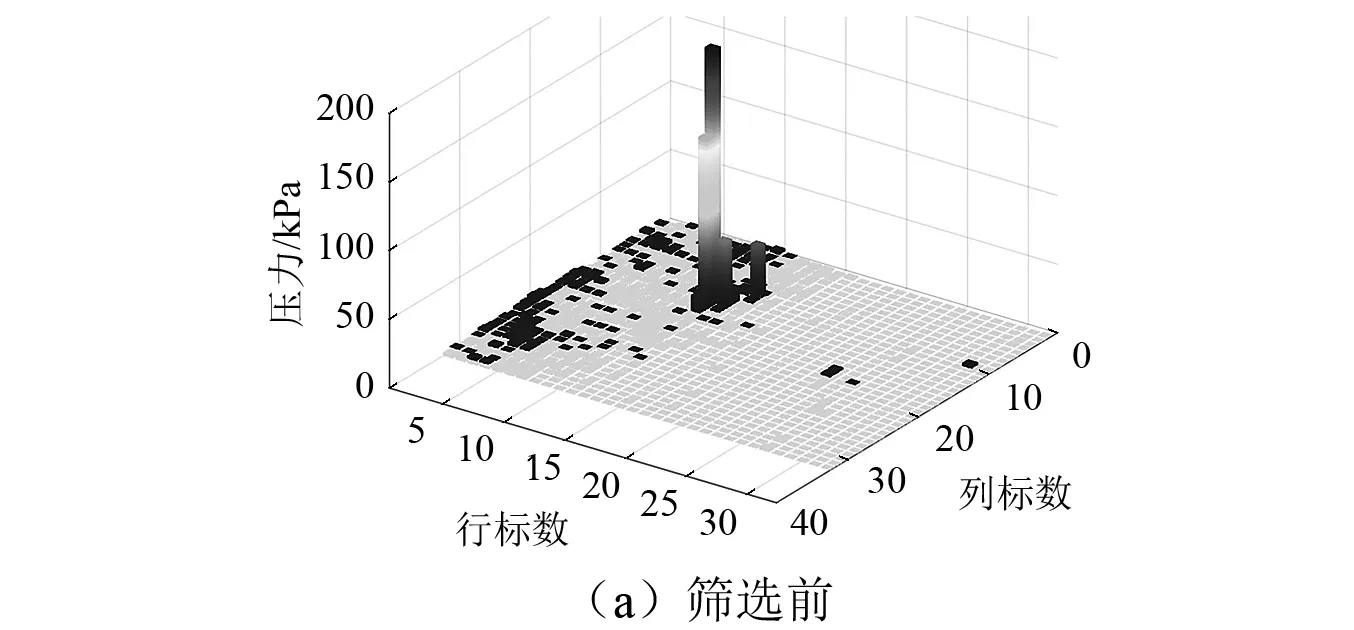
图7 筛选前后的船-冰碰撞载荷分布Fig.7 Distribution of the ice impact load before and after the filtering
由于碎冰沫剥落后,此局部区域的冰载荷在触觉传感器上是无法被测量到,因此触觉传感器所测得的即为有效接触区域上的冰载荷。图9展示的便是图7中的载荷分布在二维空间上投影。图中箭头表示的即为碰撞过程中碎冰沫剥落的位置和挤出方向。
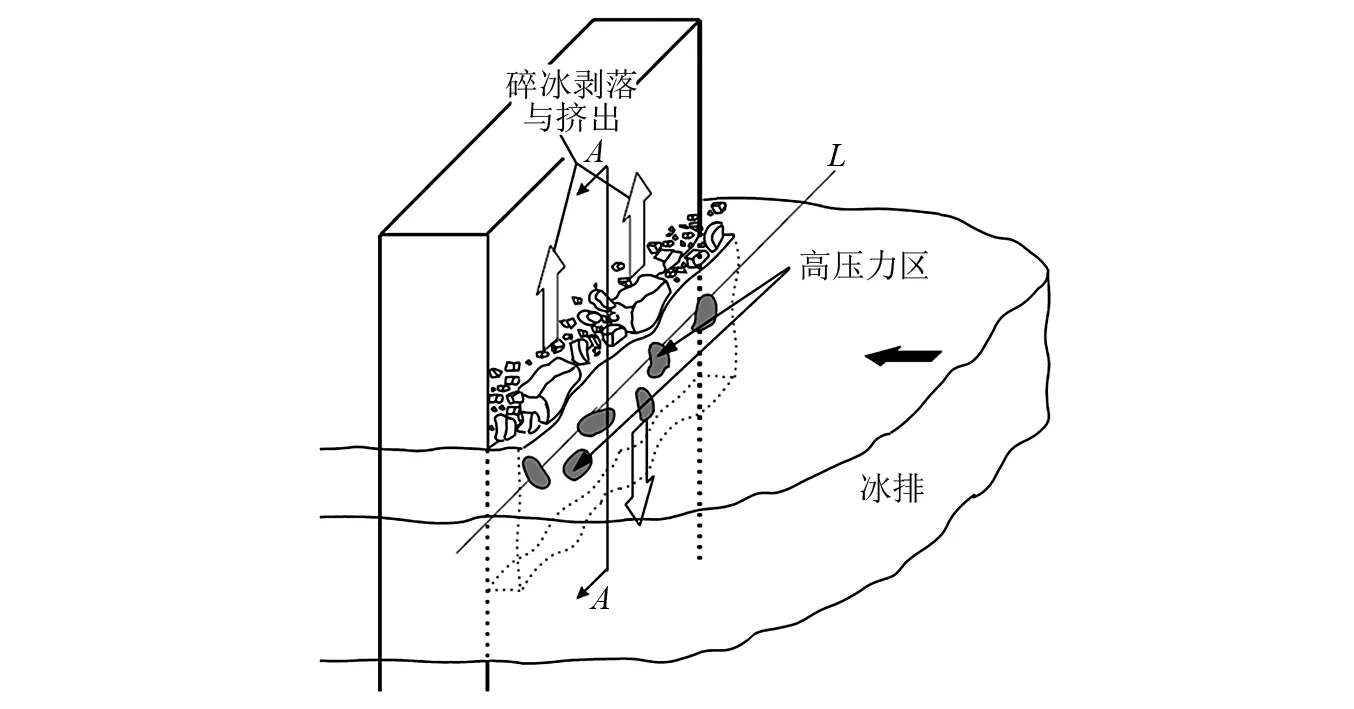
图8 冰与结构的挤压破坏示意[16]Fig.8 Illustration of the crushing failure of ice
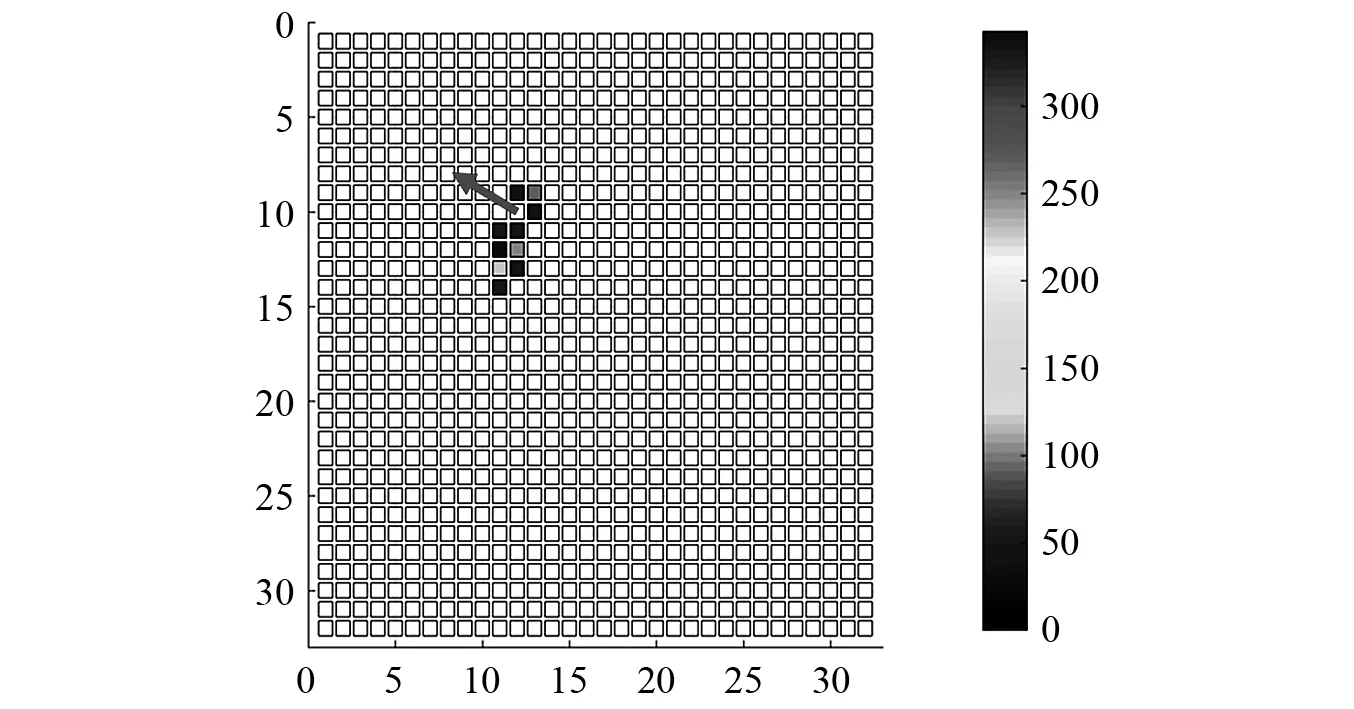
图9 载荷分布在二维空间上投影Fig.9 The ice impact load on the 2D plane
同时,有效接触区域的面积也可由触觉传感器反映出来的载荷作用面积得到。由于触觉传感器上各个测点的压力分布较为离散(见图9)。接触区域的边缘并不是连续、光滑的,并不能完全反映出真实的边界情况。为了使区域边界更加连续平滑,将每个测试单元进一步细化为单元格长度更小的单元,并利用插值得到更小单元的载荷值,最终得到平滑后的有效接触区域,及其对应的有效接触面积Ae。
根据IACS极地船级规范技术背景文件,碰撞力是根据“压力-面积关系”,由名义接触面积与作用其上的平均压力相乘得到。为了使模型试验中的碰撞力获取方法与规范保持一致,试验中需对名义接触面积进行计算。在获得有效接触区域的基础上,可对该区域的边界进行包络,将碎冰剥落后的局部区域进行补全,进而可以得到该时刻下的名义接触区域,最终得到此时刻下的名义接触面积An。
在实现上述载荷作用区域的判定后,便可对碰撞过程中的特征载荷碰撞力Ft和有效平均压力Pavg进行输出。根据IACS极地船级规范及其技术背景文件中对于碰撞力与接触区域关系的描述,碰撞力即可由触觉传感器所测得的名义接触区域上的分布压力叠加得到,即
(1)
式中:Ft为此时刻下的船-冰碰撞力,N;n为此时刻下名义接触区域上测试单元的个数;pi为单个测试单元所测得的压力,kPa;Ai为单个测试单元的面积。
在得到有效接触面积Ae后,便可对有效载荷作用区域内的有效平均压力进行分析,其计算公式如下
Pavg=Ft/Ae
(2)
式中:Pavg为此时刻有效接触面积上的有效平均压力,kPa;Ft为此时刻下的船-冰碰撞力,N;Ae为此时刻下的有效接触面积。
对一次碰撞事件中的每一帧数据均采取以上处理流程,最终可得到船-冰碰撞力Ft与有效平均压力Pavg随时间变化的曲线,如图10所示。在一次碰撞事件中,最终选取压力时程中最大的Pavg值作为代表此次事件的特征压力值,此时刻即为此次碰撞事件中最大载荷作用时刻。
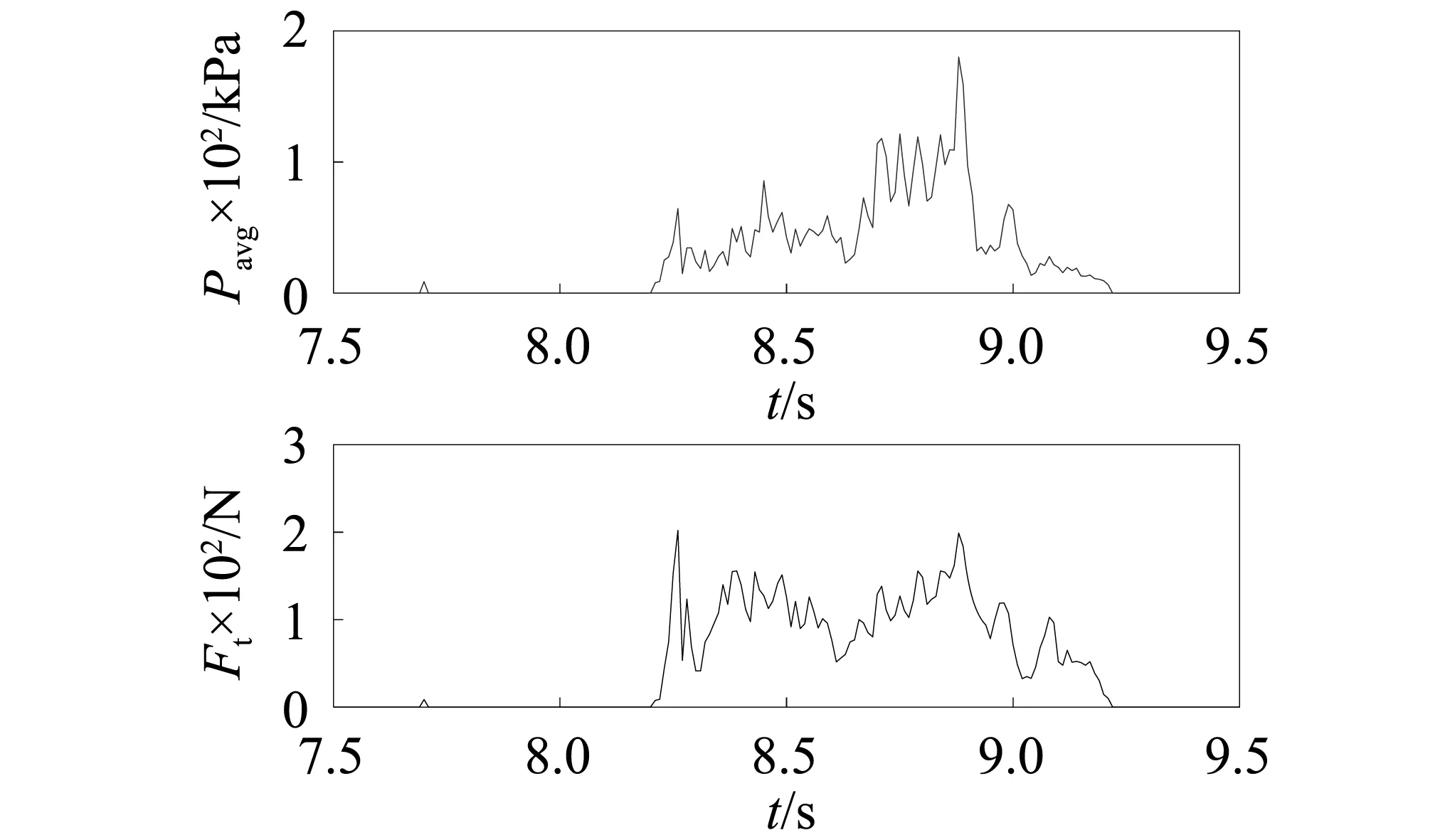
图10 船-冰碰撞力Ft与有效平均压力Pavg时程曲线Fig.10 Time history of the ice impact force Ft and the average pressure Pavg
3 船-冰碰撞过程观测
如上所述,船-冰碰撞过程是一个复杂的动态过程,包含船体与冰体运动状态的改变,及冰体的变形与破坏。因此,在试验过程中重点对浮冰的运动状态的变化,及冰载荷作用位置及水平的变化进行了重点观测。以下将结合试验录像与触觉传感器测试数据,对船-冰碰撞过程进行描述。
图11~图13展示的一次碰撞事件中不同时期的试验场景及滤除水压力干扰后的冰压力分布。根据试验录像及冰压力的演变,可以将碰撞事件分为以下三个阶段:
(1)碰撞初期—“接触”阶段,浮冰与船体首柱附近区域碰撞后,随着船体的行进,接触位置沿水线向后移动;
(2)碰撞中期—“贯入”阶段,在船体进一步的行进过程中,由于浮冰边缘受到首部倾斜线型的引导而发生下压弯曲变形,接触面也随之移动至水线下方的区域,此时,冰压力也达到了最大水平;
(3)碰撞末期—“分离”阶段,随着船体的继续前进和浮冰的向外旋转,浮冰重新上浮至水线处,并开始漂离,最终与船体脱离接触。
从以上三个阶段可知,在碰撞过程中,船体与浮冰保持了充分的接触,接触区域基本覆盖了从首柱至船肩整个首部水线区域。
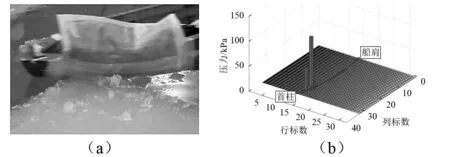
图11 碰撞初期的试验场景及冰压力分布Fig.11 Test scene and ice load at the initial stage of the impact
4 讨 论
4.1 船-冰碰撞的整体冰载荷
船-冰碰撞事件中蕴含着复杂的相互作用进程。一方面,天然海冰是一种复杂的材料,其各项力学指标均是远低于钢材的。因此,一旦碰撞发生,碰撞能量将首先转化为冰材料的变形甚至破坏行为。在Valanto的研究中,冰在船首前的变形与破坏进程被划分为三个阶段:断裂、翻转、滑动清除。冰的断裂进程始于冰排的自由边缘在与船体接触区域的局部挤压。这种局部挤压力伴随船舶的推进而增大,同时冰排与船体的接触区域也相应增大。这一进程导致冰排变形,而与之相应的弯曲应力累积则最终促成了冰排的弯曲断裂。断裂后的碎冰块开始向下翻转,直至与船身平行[17]。由此可知,在船-冰碰撞过程中,冰材料的变形与破坏行为的主要特征表现为:持续的局部挤压变形/破坏伴随持续发展的大尺寸弯曲变形。这种冰材料的变形与破坏行为已在本试验中得到了良好的体现,如图12所示。
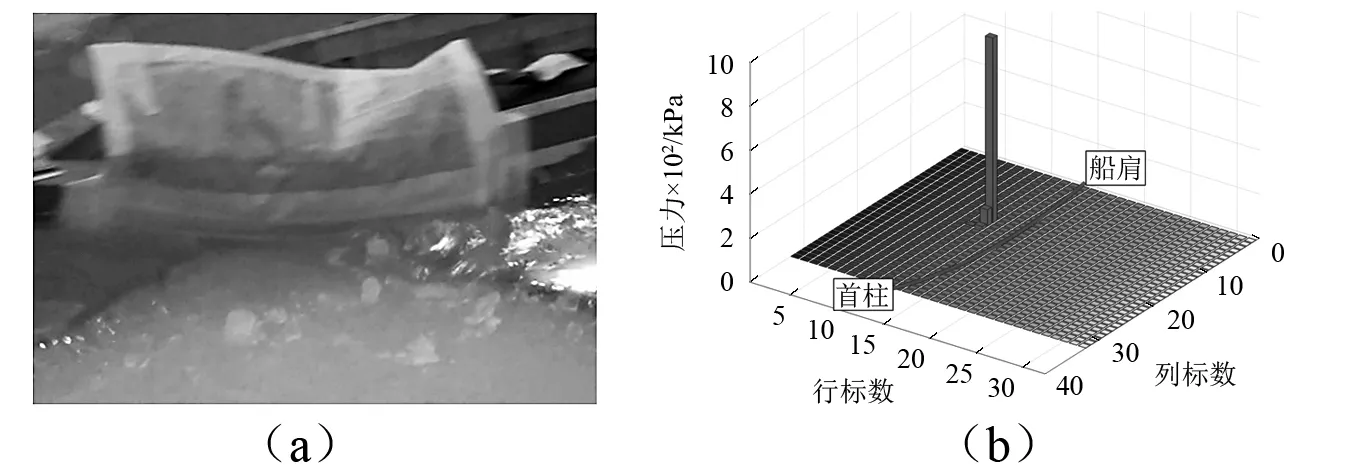
图12 碰撞中期的试验场景及冰压力分布Fig.12 Test scene and ice load at the middle stage of the impact
另一方面,巨大的海上浮冰在尺寸与质量上远大于船体,碰撞能量能够导致的冰体变形与破坏是十分有限的(即仅体现为冰体在碰撞位置的局部行为),因此,碰撞能量在冰体中并不能得到充分的释放。这样以来,船体的偏转运动就成为碰撞能量最终得以释放的主要方式。这种偏转运动在本试验中则体现为浮冰遭遇碰撞后的旋转-漂移行为,如图13所示。
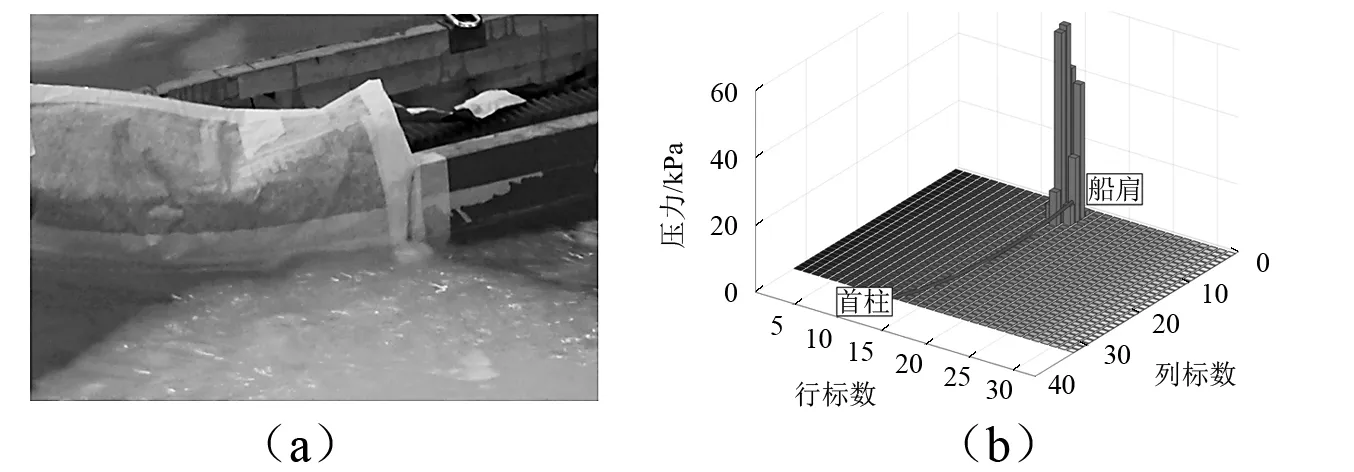
图13 碰撞末期的试验场景及冰压力分布Fig.13 Test scene and ice load at the final stage of the impact
综上,船-冰碰撞过程是一个十分复杂的过程,其中同时伴随着船体与冰体运动状态的改变,和冰的挤压与弯曲变形。因此,船-冰碰撞过程中冰载荷的作用位置和水平是处在不断变化之中的。这种变化可通过试验中船首布置的触觉传感器完整地描绘出来。
如上所述,触觉传感器能够对船体表面的压力分布形成精细地测量,但其测试数据形式却是以固定的时间间隔记录载荷在三维空间分布情况的模式形成的。这样以来,试验中的数据信息就呈现出一种四维特征,如图14所示(图中粗实线表示水线)。图14将一次碰撞事件中每个时刻下的载荷作用位置和水平均集成在一个整体三维坐标系下,由此便能勾勒出船-冰碰撞过程中整体冰载荷在空间上的作用轨迹及其随时间的演变历程。从图14可知,整体冰载荷的作用轨迹呈抛物线形,并几乎遍历首部整个区域。同时,通过载荷轨迹可以看出,冰排边缘发生了明显的下压弯曲变形。此外,观察整体冰载荷作用水平的变化,即可看出载荷经历了先上升、后下降的完整过程,最大载荷作用时刻出现在最大下压弯曲变形时刻。
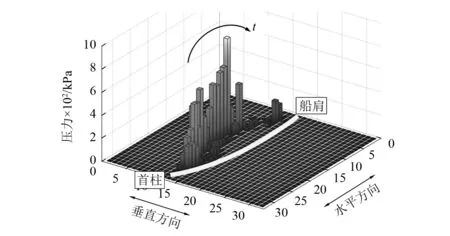
图14 整体碰撞冰荷载的时空演变历程Fig.14 The temporal and spatial variation of the global ice impact load
4.2 船-冰碰撞的局部冰载荷及其时间历程
通过对整体冰载荷作用轨迹及水平变化的勾勒,可以得到最大载荷作用时刻下的局部冰载荷作用位置,及其所对应的船体局部板梁结构上所受冰载荷的时间历程,进而为船体外板强度设计中的非线性载荷输入提供参考。
根据上述对船-冰碰撞整体冰载荷时空演变特征的分析,最大载荷作用时刻下的局部冰载荷的作用位置,可分别由其在水平方向上距首柱的长度l和在垂直方向上距初始撞击位置的偏移深度d来表示。为了进一步构建最大载荷作用位置与船体参数和冰参数的对应关系,现定义
ηl=l/B
(3)
ηd=d/h
(4)
式中:B为船舶的水线宽度;h为浮冰厚度。因此,l即可由ηlB表示,d即可由ηdh表示,如图15所示。
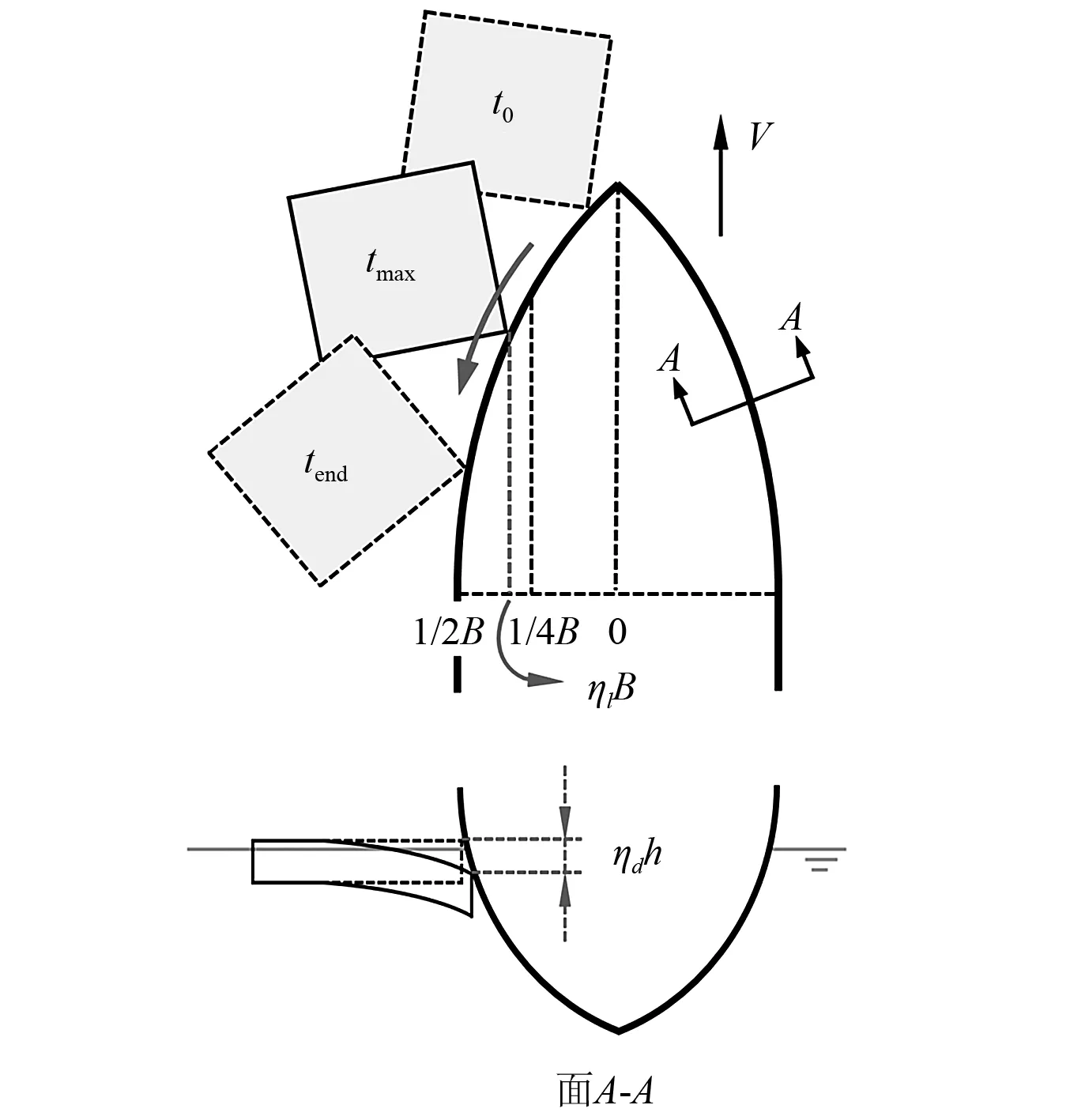
图15 船-冰碰撞过程及最大载荷作用位置示意Fig.15 Illustration of the ship-ice impact and the loaction of the maximum ice loading
同时,最大载荷时刻下局部冰载荷的有效作用面积Ae也可由触觉传感器测试数据得到。为直观描述试验得到的局部载荷作用面积的大小,现定义
ηA=ATest/AIACS
(5)
式中:ATest为模型试验得到的局部载荷作用面积通过模型比尺还原至原型的值;AIACS为通过IACS极地船级规范计算得到的设计载荷作用面积。
如上所述,考虑到碰撞载荷的随机性,本文在同等条件下共进行了16组试验。每组试验得到的ηl,ηd,ηA值见表2。
通过表2可初步得到以下结论:
(1)ηl的均值为0.259,表明初始撞击位置在首柱附近区域时,最大载荷出现的水平位置集中在1/4B附近;
(2)ηd的最大值为1.045,均值为0.642,表明在最大载荷作用时刻下,由浮冰边缘的下压弯曲变形所引发的船-冰接触区域向下偏移的最大幅度已超过了1.0倍的冰厚(原型约为5.2 m),平均偏移幅度为0.642倍的冰厚(原型约为3.2 m);
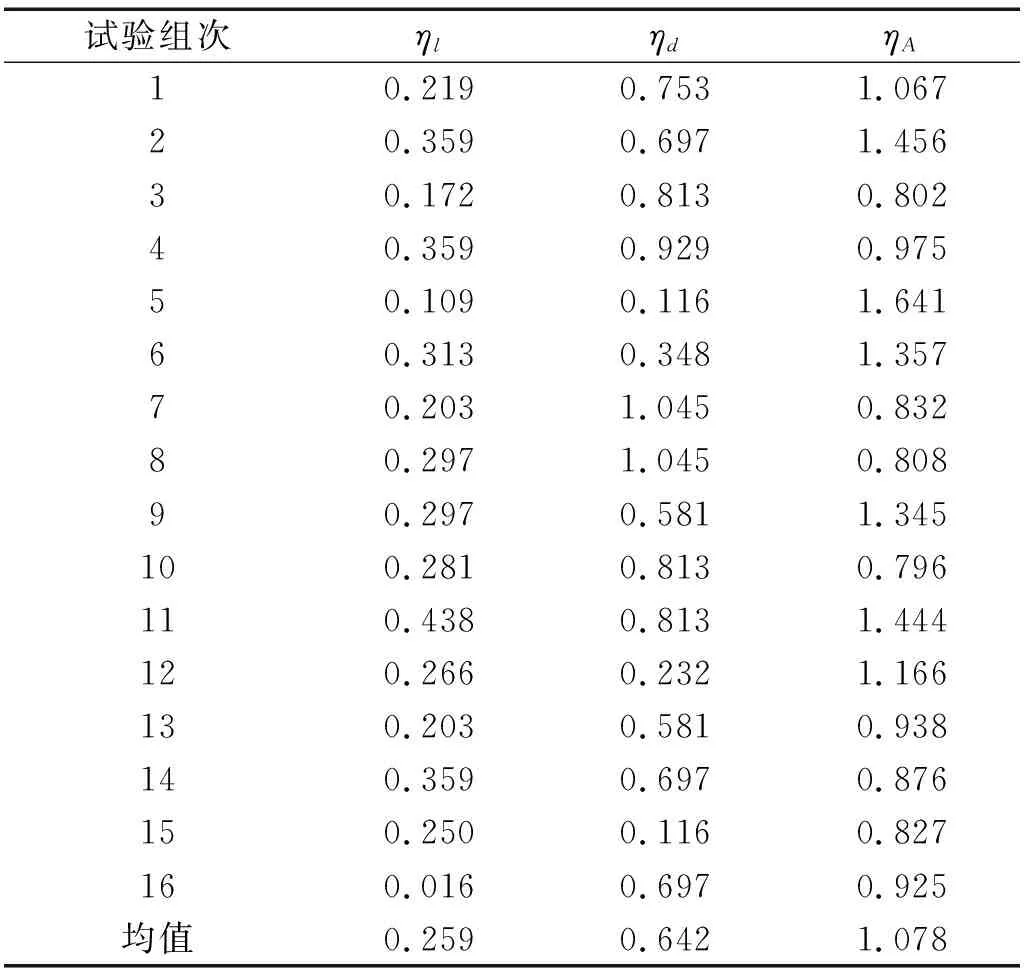
表2 最大载荷作用位置及载荷作用面积统计
(3)ηA的均值为1.078,表明由试验得到的船-冰碰撞载荷的有效作用面积大小与规范得到的设计载荷面积大小基本保持一致。
在获得最大载荷时刻下的局部碰撞冰载荷作用位置和面积后,便可对此局部区域上的载荷时程进行提取和分析。根据不同试验组次下的局部碰撞载荷时程曲线的波动特征,可将其分为以下4类,如图16所示。
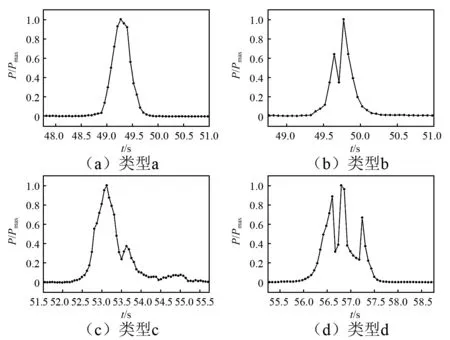
图16 局部碰撞载荷时程特征分类Fig.16 Classification of the time history of the local ice impact loads
(a)“单峰”型,即载荷经历简单的加载与卸载过程;
(b)“双峰”Ⅰ型,即在载荷到达最大峰值前的加载阶段出现了中间峰值;
(c)“双峰”Ⅱ型,即在载荷经历最大峰值后的卸载阶段出现了中间峰值;
(d)“多峰”型,即在载荷的加载与卸载阶段均有中间峰值的出现。
在本文已进行的16组次的试验中,“单峰”型出现次数最多,共9次,约占总数的56%;“双峰”Ⅰ型与Ⅱ型各出现了3次,分别占约19%;“多峰”型只出现1次,占约6%。
为了更为详尽地刻画局部碰撞载荷的时程特征,现将每组试验得到的局部载荷加载时间TR、总时间TT、加载时间占总时间的百分比、中间峰值与最大峰值的比例进行统计,并根据其特征类型分别进行归类和均值的计算。统计结果见表3。表3所列举的数据均通过模型比尺转换至原型尺度。
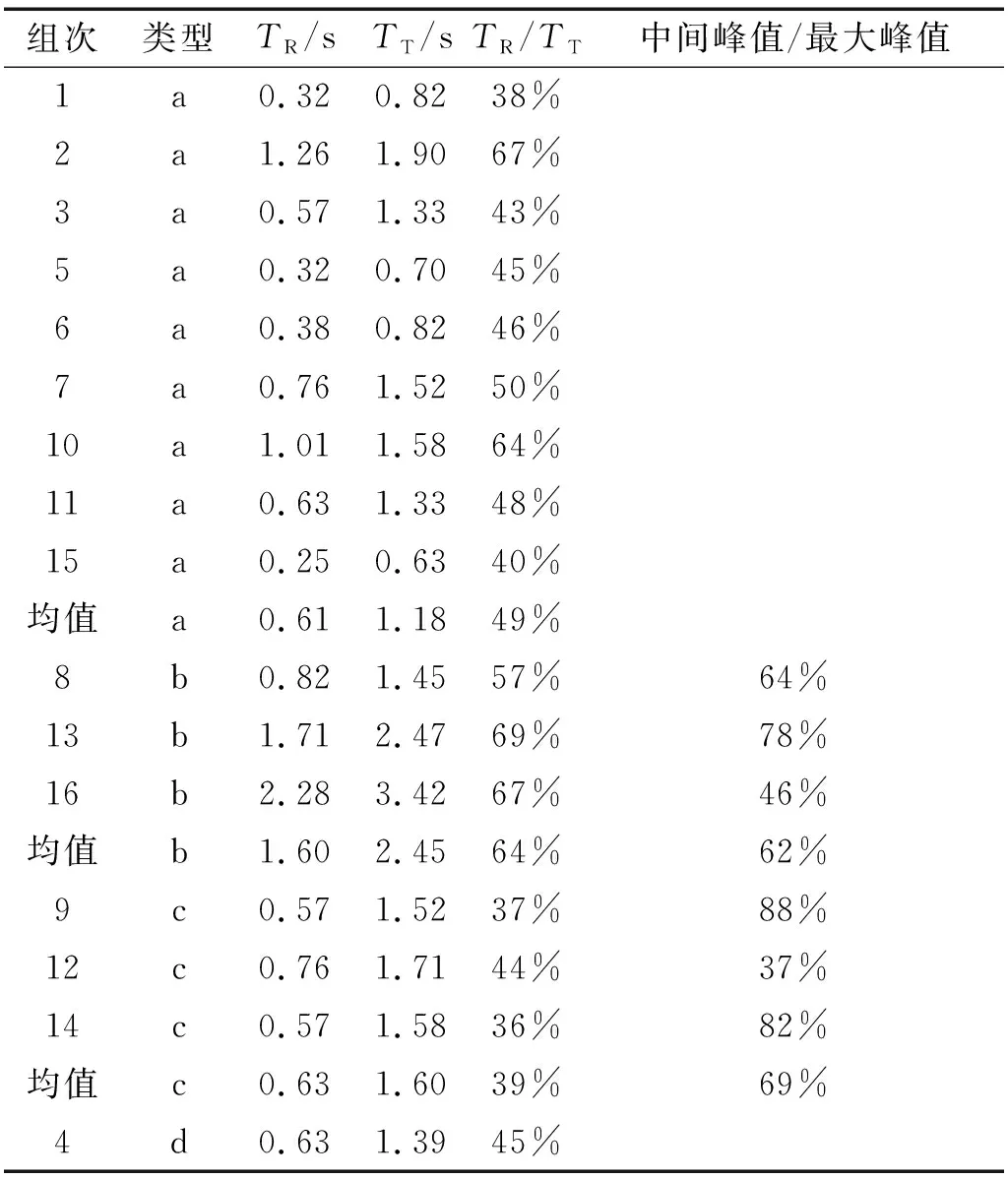
表3 局部碰撞载荷时程特征统计
通过表3可以初步得到以下结论:
(1)针对出现次数最多的“单峰”型的载荷时程,其加载时间占总时间的平均比例约为49%;总时间的最大值为1.90 s,平均值为1.18 s。
(2)针对“双峰”Ⅰ型,由于其加载阶段出现了中间峰值,其加载时间占总时间的平均比例较“单峰”型要高,约为64%;总时间的平均值为2.45 s,同样高于“单峰”型;中间峰值与最大峰值的平均比例约为62%。
(3)针对“双峰”Ⅱ型,由于其卸载阶段出现了中间峰值,其加载时间占总时间的平均比例较“单峰”型要低,约为39%;总时间的平均值为1.60 s,略高于“单峰”型;中间峰值与最大峰值的平均比例约为69%。
(4)针对“多峰”型,由于只出现一次,无法从统计层面对各项参数进行分析;然而,在此次试验中,其加载时间占总时间的比例为45%,这与其时程特征(即加载与卸载阶段均出现中间峰值)是具有一定对应性的。
5 结 论
本文针对船-冰碰撞载荷的时间历程特征,进行了一系列的模型试验。试验在对船体表面冰压力形成直接测量,和对船-冰碰撞载荷作用轨迹形成完整呈现的基础上,重点考察了船-冰碰撞整体载荷的时空演变历程、最大载荷作用时刻下的局部碰撞载荷的作用位置和面积,及其时间历程特征。本文得到的结论如下:
(1)船-冰碰撞过程是一个十分复杂的过程,其中同时伴随着船体与冰体运动状态的改变,和冰的挤压与弯曲变形。因此,船-冰碰撞过程中的整体冰载荷沿船体外板的作用轨迹,并非简单地从船首向船肩处沿水线扫略,而是呈现出一种近似抛物线的轨迹。
(2)船-冰碰撞过程可分为“接触”、“贯入”和“分离”三个阶段,其中在“贯入”阶段,冰的下压弯曲变形得以发展,载荷也往往在这一阶段达到最大值。
(3)当初始撞击位置在首柱附近区域时,最大载荷出现的水平位置集中在1/4B附近,同时由浮冰边缘的下压弯曲变形所引发的船-冰接触区域向下偏移的平均幅度为0.642倍的冰厚,最大幅度已超过1.0倍的冰厚。
(4)最大载荷作用时刻下局部碰撞载荷的时程曲线呈现多种形态,其中以“单峰”型最多,出现比例约为56%;“双峰”型次之,共占约38%。
(5)“单峰”型载荷时程的加载时间占总时间的平均比例约为49%,总时间出现的最大值为1.90 s,平均值为1.18 s;针对“双峰”型载荷时程,中间峰值的出现将提高其所在阶段(加载或卸载)占总时间的比例,同时,中间峰值与最大峰值的平均比例约为2/3。
值得指出的是,本文研究仅针对特定条件下的单一船型,因此所获得的相关规律与结论也仅限定于该条件。针对更多冰条件与船型的模型试验研究将在未来逐步开展。
