半挂式液罐车防侧翻控制策略开发∗
2019-02-15赵伟强凌锦鹏宗长富
赵伟强,凌锦鹏,宗长富
(吉林大学,汽车仿真与控制国家重点实验室,长春 130022)
前言
半挂式液罐车除质心位置高和载质量大特点外,还存在液体晃动与车体运动相互耦合的特点,导致侧倾稳定极限相比普通重型车低,极易失稳而发生侧翻[1],因此提高液罐车行驶稳定性具有重要意义。目前绝大多数研究是通过罐体形状优化来提高液罐车稳定性[2],但该方法无法针对不同工况动态提升车辆稳定性。虽然通过主动安全控制的方法具有更大的普适性,但该方面的研究却很少。
伊朗科技大学的FEIZI M M等[3]采用最优线性二次型设计主动悬架控制器,降低液罐车辆液体晃动对车辆操纵稳定性和车体结构的影响。ACARMAN T等[4]通过驱动和制动控制,降低罐内液体的纵向和横向晃动,扩大了液罐车的稳定域。国内南京林业大学刘静[5]采用准静态液体模型与ADAMS车辆动力学模型联合仿真,分析了液罐车稳态转向的侧翻阈值和侧翻稳定性,并提出采用主动悬架等改善方法。胡晓明等[6]以横摆角速度为控制量,设计了相平面分区控制器,通过差动制动的控制方式进行液罐车的稳定性控制。
对液罐车动力学特性的模拟需要建立液体晃动模型,主要类型有准静态液体模型、数值模型、解析模型和机械等效力学模型等。其中,准静态液体模型计算速度快,但无法反映液体的动态变化和晃动过程[7];数值模型求解准确,但过程复杂,时效性差;解析模型适应性差,只适用于求解罐体形状规则的情况;机械等效力学模型不能求解具体的晃动细节,但对于工程上计算晃动力或力矩,能保证模型的实时性同时兼顾准确性。
在车辆的主动防侧翻控制方面,目前主要有主动悬架、主动转向和差动制动[8-10]等几类控制方式。其中,主动悬架的阻尼调节范围不大,悬架控制需要时间较长,且主动悬架通常只为高档商用车配备;主动转向的执行机构成本高、结构复杂,目前装车率还较低;差动制动通过对每个车轮的制动力进行精确分配控制,对侧翻主动控制效果良好,且无需增加额外的硬件成本,现已成为一种高效的抗侧翻控制方法,并得到了广泛的应用。
针对目前半挂式液罐车稳定性方法的不足,本文中建立了半挂式液罐车整车动力学仿真模型,并提出基于差动制动的半挂式液罐车防侧翻控制策略;通过Trucksim/Simulink联合仿真,验证了液罐车防侧翻控制策略的有效性。
1 半挂式液罐车整车动力学仿真模型的建立
半挂式液罐车的横摆和侧倾运动示意图如图1和图2所示,包括牵引车和挂车两部分,二者通过第5轮连接。
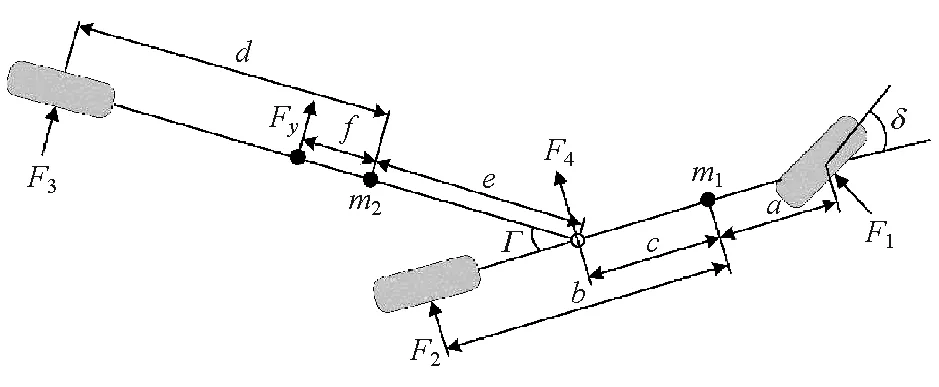
图1 半挂式液罐车横摆运动示意图
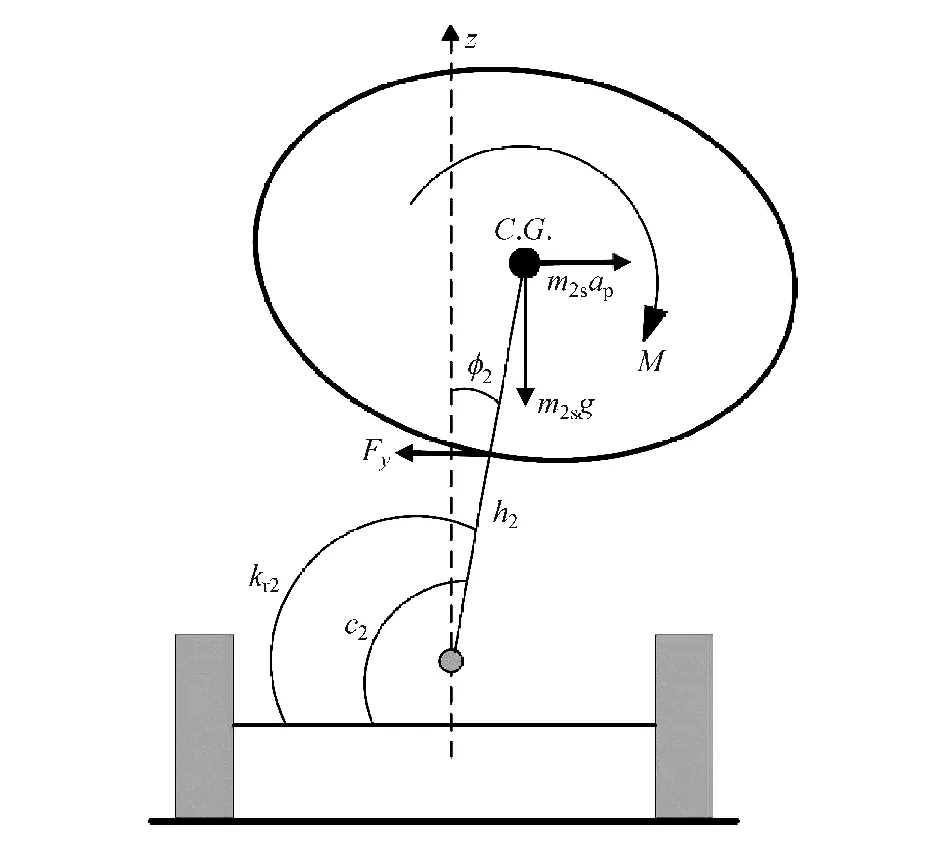
图2 半挂式液罐车侧倾运动示意图
在建立半挂式液罐车整车仿真模型时,将车辆刚体部分与液体货物分别建模,并以罐体运动状态和液体作用力或力矩进行联系,两个子系统间的联系如图3所示。半挂车整车刚体模型采用Trucksim建立,而罐内液体晃动采用等效单摆模型来模拟。该仿真模型将为控制策略提供车辆模拟平台。
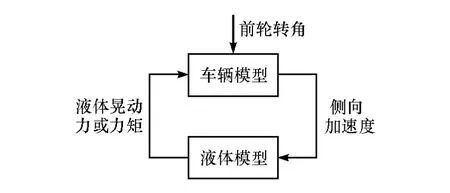
图3 车辆模型与液体模型交互示意图
液体等效单摆模型示意图如图4所示。
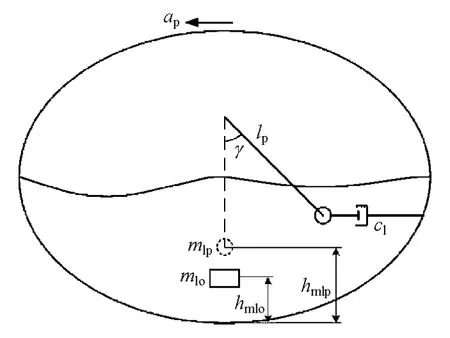
图4 液体单摆模型示意图
将罐内液体质量分为靠近自由液面部分的单摆质量和靠近罐底部分的固定质量,从而确定单摆模型动力学方程:

横向激励产生的液体晃动力Fy为

横向激励产生的液体晃动对罐底的力矩M为

式中:ml,mlp和mlo分别为罐内液体总质量、等效单摆质量和固定质量;hmlp和hmlo分别为罐体底部到等效单摆质量质心和固定质量质心的距离;ap为液罐侧向加速度;γ为等效单摆的摆动角度;cl为等效阻尼;lp为等效单摆长度。
以上参数需通过辨识来确定,参数辨识的一般等效原则为:
(1)罐内液体总质量保持不变;
(2)等效系统固有频率和液体晃动基频相等;
(3)罐内液体总质量的质心位置保存不变;
(4)等效系统的动能和液体系统的动能相等;
(5)等效系统产生的力与力矩和液体晃动的力与力矩相等。
利用流体数值仿真软件FLUENT在单位侧向加速度阶跃激励下的仿真结果进行参数辨识,得到结果如表1所示。
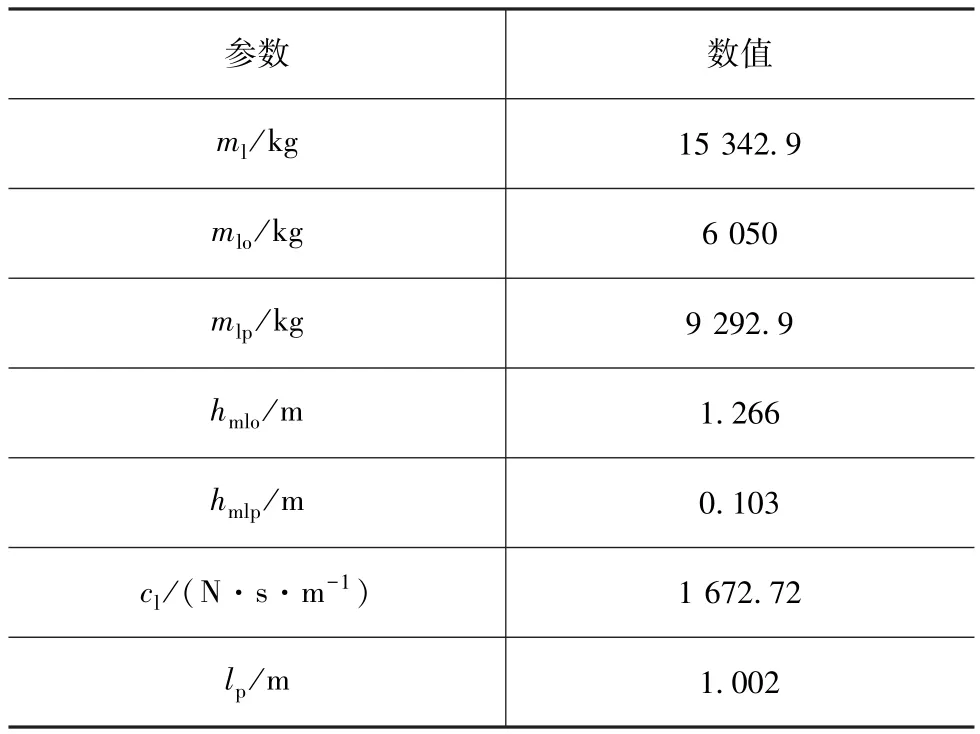
表1 液体单摆模型参数
采用2m/s2侧向加速度阶跃激励对参数辨识结果进行验证,辨识后的单摆模型和FLUENT仿真结果对比如图5和图6所示。从图中可以看出,液体等效单摆模型与FLUENT建立的非线性模型吻合较好,能较好地反映罐内液体的晃动特性。
2 半挂式液罐车6DOF线性简化模型
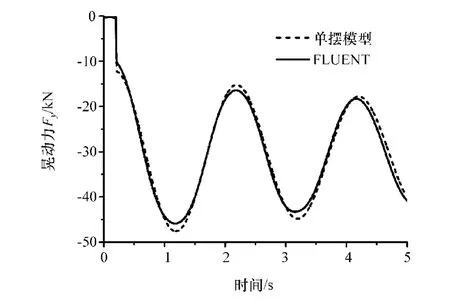
图5 液体晃动力对比
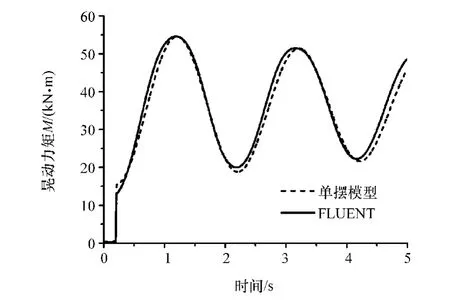
图6 液体晃动力矩对比
为进行控制算法设计,在文献[11]的基础上,加入了液体晃动力和晃动力矩项,建立一个半挂式液罐车6DOF线性简化模型,其自由度包括牵引车的横摆、侧倾和质心侧偏角,挂车的横摆与侧倾,以及液体等效单摆摆角,如图1和图2所示。
建模过程做如下假设:
(1)车辆的纵向速度恒定;
(2)忽略空气动力学影响;
(3)挂车多个车轴简化成单轴,且等效轴的位置在其几何中心;
(4)铰接角较小;
(5)忽略牵引车与挂车的俯仰运动;
(6)以转向盘转角作为模型输入;
(7)轮胎载荷变化不会引起轮胎回正力矩和轮胎特性的变化;
(8)假设路面水平,忽略车辆垂直方向运动。
牵引车侧向运动:

牵引车横摆运动:

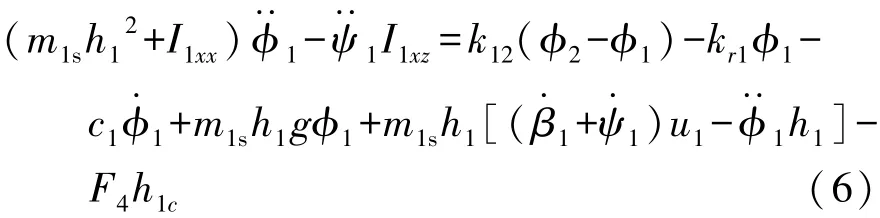
牵引车侧倾运动:
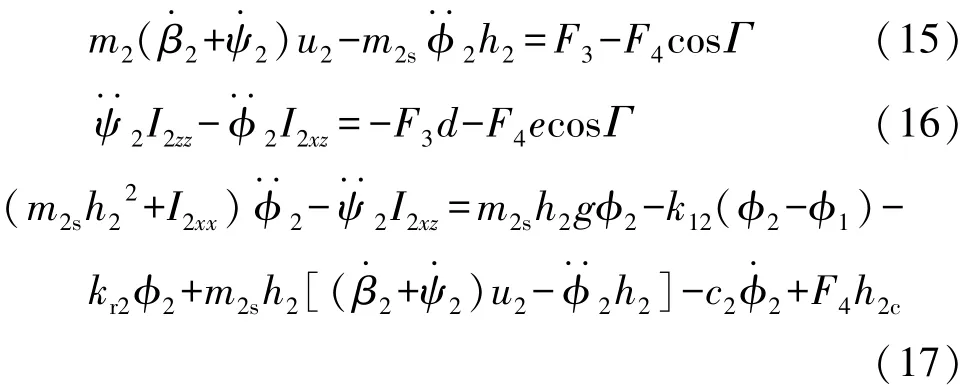
挂车侧向运动:

挂车横摆运动:

挂车侧倾运动:
第5轮处的约束方程:
轮胎模型采用简单的线性轮胎模型,即
式中:m1和m1s分别为牵引车的总质量和簧载质量;m2和m2s分别为挂车的总质量和簧载质量;a,b和c分别为牵引车质心到牵引车前轴、后轴和第5轮中心的距离;d,e和f分别为挂车质心到挂车轴、第5轮和液体晃动力作用点的距离;h1和h2分别为牵引车质心和挂车质心到其各自侧倾轴线的距离;h1c和h2c分别为第5轮中心到牵引车和挂车侧倾轴线的距离;δ为前轮转角;Γ为铰接角;u1和u2分别为牵引车和挂车的纵向速度;β1和β2分别为牵引车和挂车的质心侧偏角;ψ·1和 ψ·2分别为牵引车和挂车的横摆角速度;φ1和φ2分别为牵引车和挂车的侧倾角;F1,F2和F3分别为牵引车前、后轴和挂车轴轮胎所受的侧向力;F4为第5轮处的侧向力;I1xx和I1zz分别为牵引车绕x轴和z轴的转动惯量;I1xz为牵引车簧载质量绕质心横摆侧倾惯性积;I2xx和I2zz分别为挂车绕x轴和z轴的转动惯量;I2xz为挂车簧载质量绕质心横摆侧倾惯性积;k1,k2和k3分别为牵引车前后轴和挂车轴轮胎的侧偏刚度;kr1,kr2和k12分别为牵引车、挂车和第5轮的侧倾刚度;c1和c2分别为牵引车和挂车的侧倾阻尼;Fy和M为液体模型得到的液体晃动力和力矩。
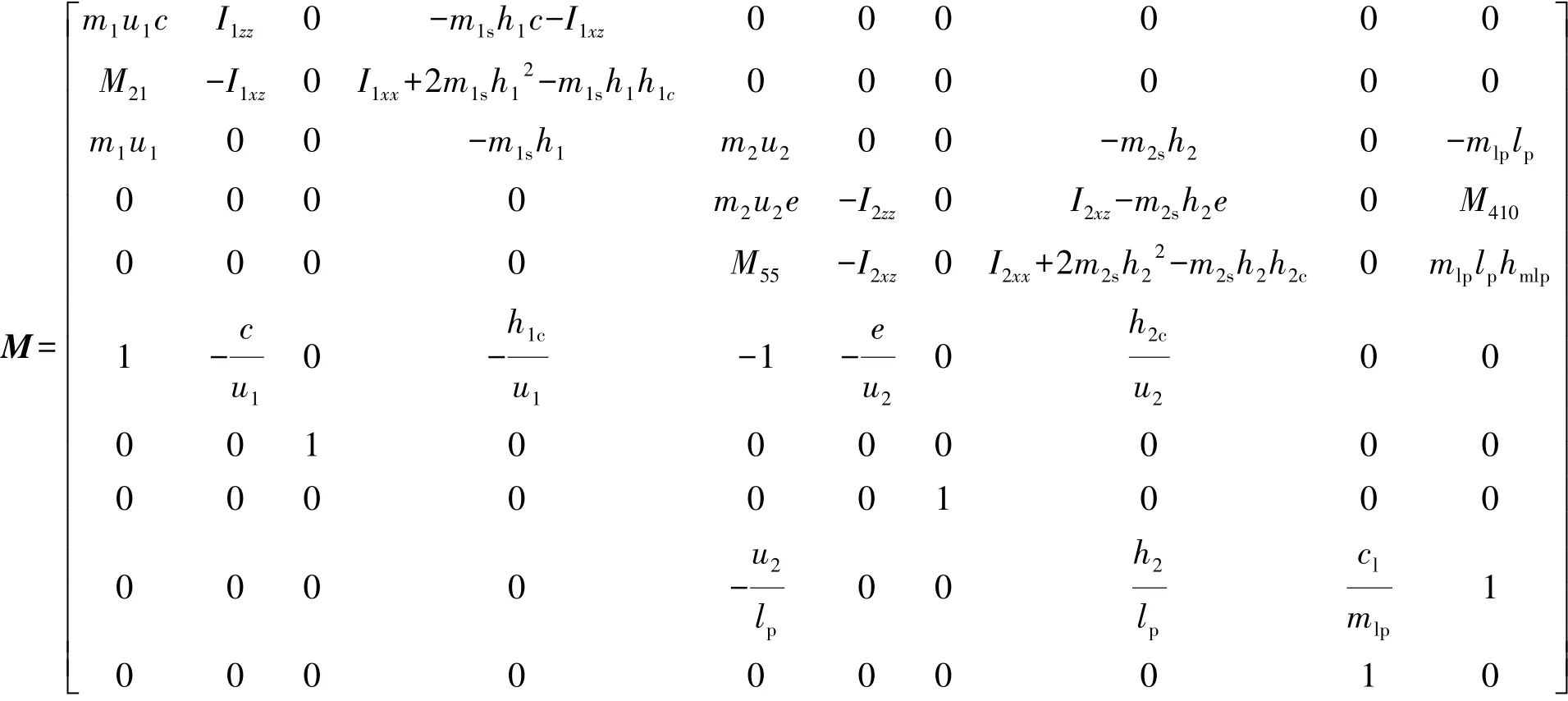
简化模型的状态方程为

其中

3 差动制动防侧翻控制策略
基于差动制动设计半挂式液罐车LQR防侧翻控制策略,其流程图如图7所示。以半挂式液罐车整车仿真模型的状态变量实际值与重型半挂车5DOF参考模型理想值之间的偏差作为输入,利用LQR控制器,计算最优附加横摆力矩,并转化为各轮的制动轮缸压力,分配给半挂式液罐车仿真模型,通过差动制动实现液罐车防侧翻的控制目的。
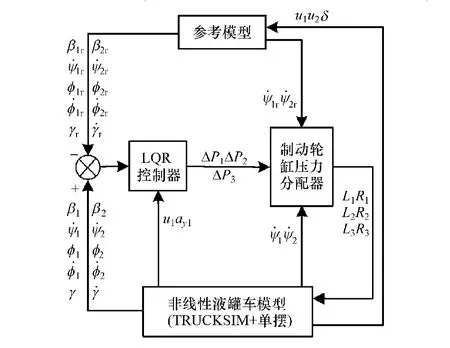
图7 差动制动控制策略流程图
3.1 重型半挂车5DOF参考模型的建立
由于半挂式液罐车参考模型的状态变量稳定值仍然存在液体的单摆摆角,并不是控制所要逼近的稳定状态,因此采用装载固体货物的5DOF重型半挂车参考模型作为半挂式液罐车的逼近目标。
在半挂式液罐车6DOF线性简化模型基础上,将液体附加晃动力和力矩去除,则式(7)~式(9)分别变为
其余各式均与6DOF线性简化模型相同,得到装载固体货物的5DOF重型半挂车模型。其状态方程为

令其状态变量的导数为0,即可得到5DOF重型半挂车参考模型,式(18)变为

其中

3.2 基于LQR控制器的最优附加横摆力矩决策
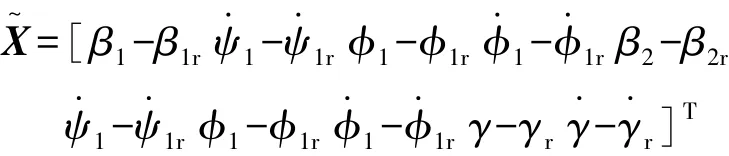
将控制量添加到状态方程中,同时以状态变量的偏差作为新的状态变量,得到偏差状态方程如下:

式中:m=[M1M2]T,M1和M2分别为施加于牵引车和挂车的附加横摆力矩;E为横摆力矩分配矩阵。为状态偏差,即
定义最优控制目标函数为
式中Q和R为其权矩阵。
最优附加横摆力矩为
式中:R-1ETP为反馈增益矩阵K;矩阵P为黎卡提方程PA+PAT-PER-1ETP+Q=0的解。
3.3 制动轮缸压力决策
将计算得到的最优附加横摆力矩转换为各车轮的制动轮缸压力,即

式中:Δp为所需的制动轮缸压力;ΔM为防侧翻控制策略计算得到的最优附加横摆力矩;Rw为车轮半径;Rc为制动器有效作用半径;Sc为制动气室的有效作用面积;L为制动轮到牵引车/挂车质心位置的距离;kef为制动器制动效能因数。
采用牵引车和挂车分别差动制动的方式进行防侧翻控制,将半挂式液罐车仿真模型的实际横摆角速度与5DOF重型半挂车参考模型的理想横摆角速度进行比较,确定牵引车和挂车需要制动的车轮,进而对牵引车和挂车分别施加制动,实现附加横摆力矩。决策规则如下。
同时为避免频繁启动程序进行制动而影响汽车的平顺性,采用牵引车侧向加速度作为开启差动制动控制的门限阈值,当侧向加速度大于0.45g时程序开启,反之则不进行控制。
4 仿真验证
为验证控制策略的有效性,选择图8所示的60km/h车速和150°转向盘转角的阶跃工况对其进行仿真验证。
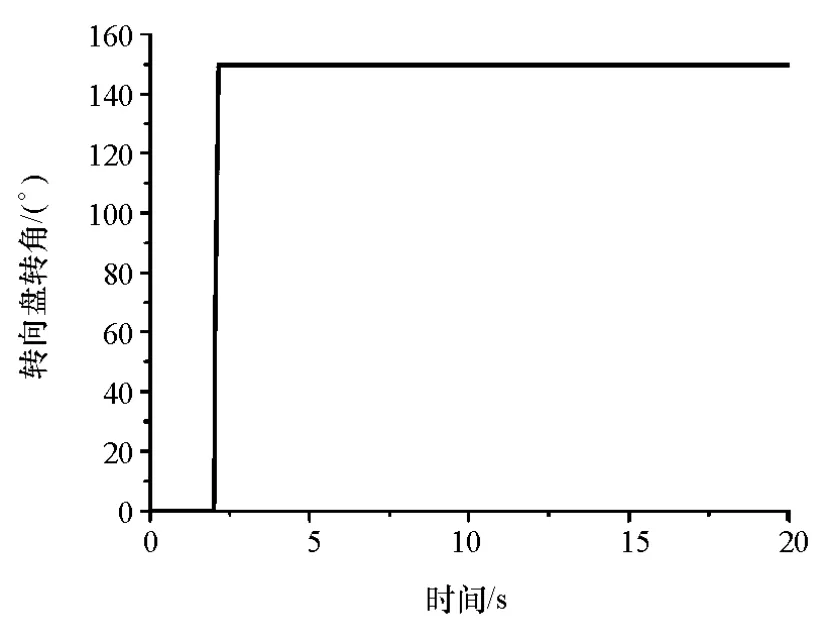
图8 转向盘转角
车辆的状态参数曲线如图9~图12所示。
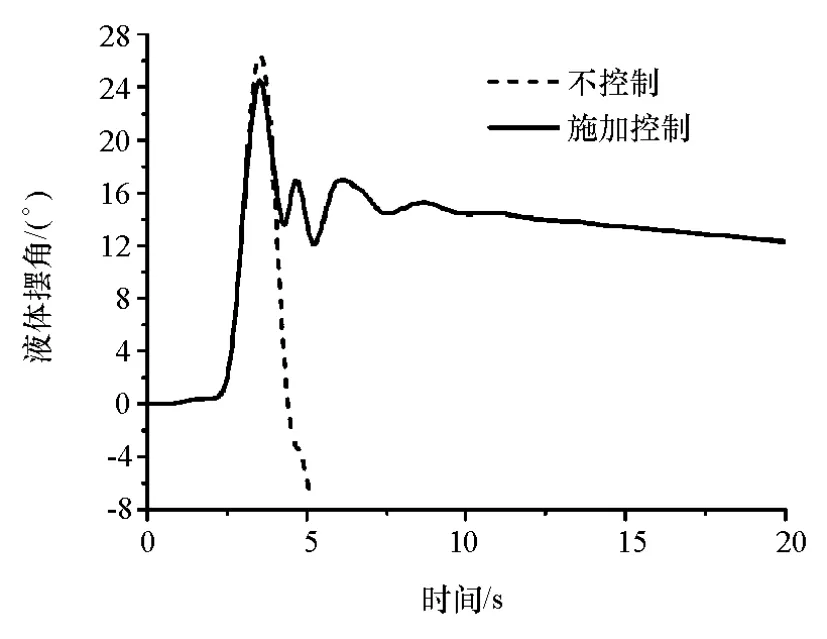
图9 液体摆角
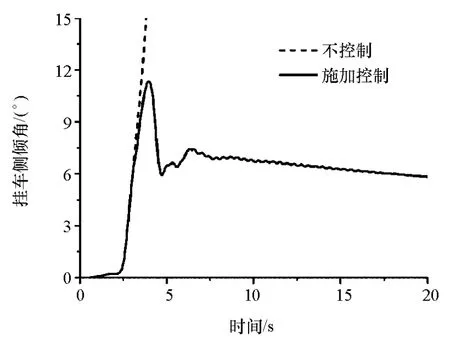
图10 挂车侧倾角
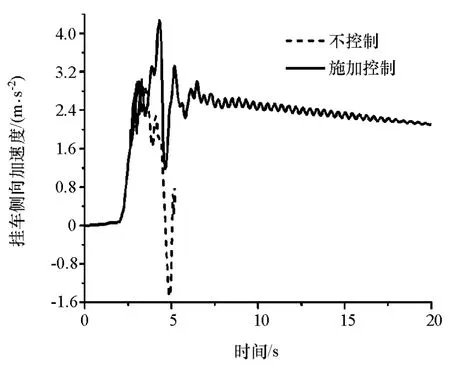
图11 挂车侧向加速度
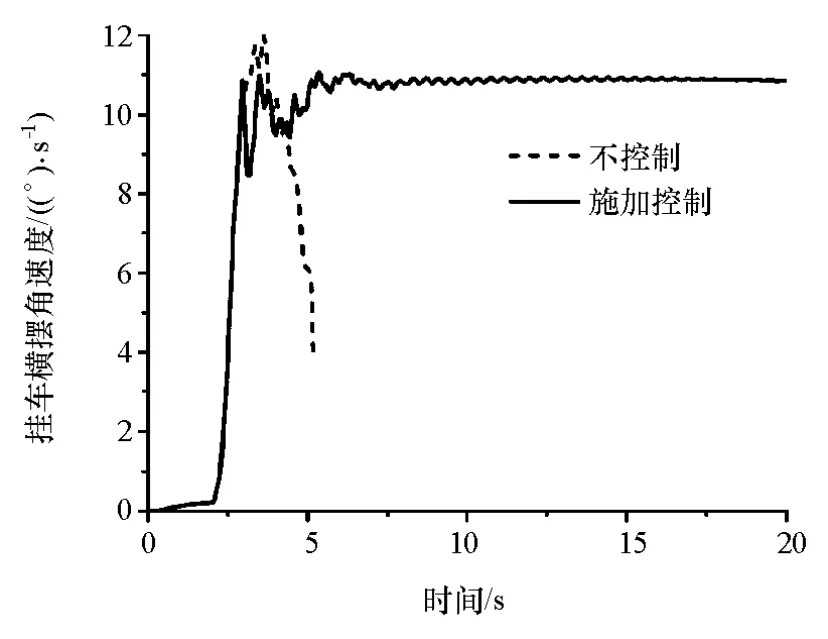
图12 挂车横摆角速度
由于半挂式液罐车的危险部位主要为挂车,且牵引车与挂车的状态参数曲线类似,故只给出了挂车的状态参数曲线。
由图9可知:在不施加控制的情况下,液体摆角的晃动幅度很大,进而对半挂式液罐车的稳定性造成严重影响;而当施加了控制策略后,液体单摆摆角下降到了12°左右,减弱了对半挂式液罐车稳定性的影响。
由图10~图12可知:在阶跃工况下,若不施加控制策略,在3s左右,侧倾角急速增大,车辆便开始大幅侧倾,直到5s左右,车辆完全侧翻;而当施加了控制策略后,当车辆有侧翻危险时,控制程序分别对牵引车和挂车各轴进行制动,通过差动制动的控制产生附加横摆力矩,使车辆侧倾趋势减小,挂车侧倾角从11.8°下降到6°左右,挂车横摆角速度被限制在了10.8°/s左右,挂车侧向加速度也被限制在了2.4m/s2左右。因此,该控制策略能有效地防止车辆侧翻的发生,提高车辆的稳定性。
5 结论
利用液罐车等效单摆模型模拟罐内液体的横向晃动,结合Trucksim建立了半挂式液罐车整车动力学仿真模型。基于考虑液体摆角的半挂式液罐车6DOF线性简化模型设计了LQR状态反馈控制器,以重型半挂车稳态响应为控制目标,采用差动制动的方式进行主动防侧翻控制。最后在阶跃工况下进行仿真验证,证明了控制策略的有效性。本文对提高半挂式液罐车的主动安全性、减少侧翻事故具有重要理论意义。
