基于DSP图像处理的播种导航技术研究
2019-01-27伍坪
伍 坪
(三明学院 机电工程学院,福建 三明365000)
当前,处理器已经进入了多核时代,无论是超级计算机、服务器等大型计算设备,还是个人计算机、智能手机和平板电脑等,都在向着采用多核处理器的方向发展。深度图像的估计和处理方法是实时视频技术的关键和重点。图像实时处理技术的基本方法是:用基于深度图像处理技术来估计和重建多视点视频,从而显著减小数据带宽。随着现代农业技术的发展,无人驾驶技术开始在农业生产过程中使用,特别是在一些大面积作业地区使用。无人驾驶播种机完成自主作业主要是依赖于高精度的导航技术,将多核DSP深度图像处理技术应用于播种机的导航系统中,对提升播种机导航的效率和精度都具有重要意义[1]。
1 系统框架
自动驾驶汽车依靠人工智能、视觉计算、雷达、监控装置和全球定位系统协同合作[2-5],可以在没有任何人工操作的情况下,自动安全地工作。由于农业作业环境较为复杂,为了实现精准导航及应对突发状况,需要采用视觉导航技术对周围环境进行全方位监测。图1所示为无人驾驶播种机的基本控制系统框架。在图1中,无人驾驶播种机通过视觉导航传感器以及DSP和播种机自身运动模型来对播种路径进行规划,然后利用PID反馈装置和智能控制器实现转弯等难度较高的动作[6-8]。
视觉导航图像的处理主要采用多核DSP处理器来完成,基本框架如图2所示。在图2中,进行视频处理时,系统先将图像数据存放到外部存储器,然后把数据分配给不同的DSP内核进行图像深度处理,最后将计算数据返回到外部存储器[9-12]。
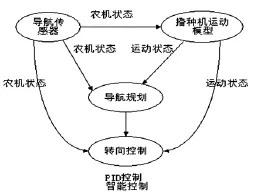
图1 无人驾驶播种机控制系统框架
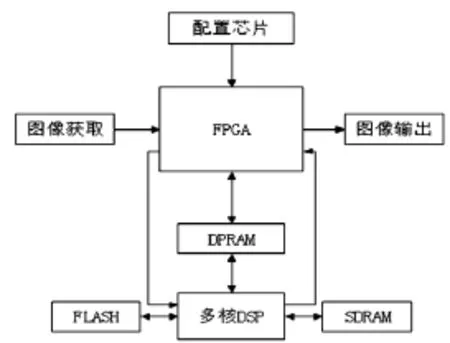
图2 DSP图像处理框架
2 深度图像处理技术和处理模块设计
深度图像处理技术是以色度分割原理为基础的,有助于提高播种机视觉导航图像的实时处理效果[13-15]。一般一幅播种机视觉导航实时图像由两部分组成:亮度和色度[16]。在进行深度图像处理时,通过处理亮度和色度信息可以得到视差矢量和深度图像。如果色度图像按照一定的标准被分割开,那么物体的背景区域就会相应地被检测出来。如果像素值在某个分割区域内各不相同,则表示深度图像预测是错误的,需要通过一些方法来进行修正,而修正是以色度分割为基础的[17-20]。色度分割主要分为三个步骤:
1)将亮度和色度分量归一化到[0,255]中。
2)进行图像分割。在进行图像分割时需要遵循一定的规则[21-23]:当相邻像素的绝对值 a小于色度分量分割阈值D时,会被归类到相同的分割区域,否则会出现在下一个分类上。具体规则为:
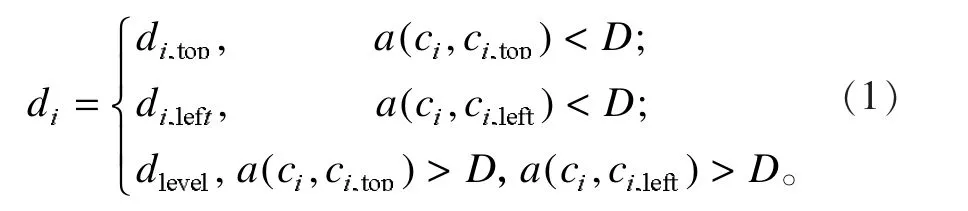
其中,di表示第i个像素的分割值,为第i个象素的平均值,ci表示灰度图像像素值,ci,top和 ci,left分别表示像素的顶部和左侧值。
3)色度的分割区域归类。同一色度分割被归在同一区域内[21-23]。一般来说,同一区域内的像素深度值相同,色度分割的平均深度值可以由

得出,其中,ak表示第k个色度分割的平均深度,mi表示色度。深度值是否属统一色度分割可以由

决定。其中,pnumk表示第k个色度分割包含的像素个数;PNUMTH表示预设的像素序号阈值,其数值可以通过对同一分割区域内的像素深度值取平均值获得[24-25]。
播种机视觉导航视频深度处理模块的架构和组成根据算法的结构和组成来设计,主要包括时钟频率、各种模块和存储结构。深度图像处理系统总体框图如图3所示。色度分割模块主要由三部分组成:图像锐化模块、图像分割模块和图像滤波模块。色度锐化处理模块主要负责对图像进行锐化处理,色度分割按照前文所述的规则进行划分,深度滤波主要保证图像的优化在同一色度分割区域内进行。
图4所示为深度图像滤波模块的系统框架。这一部分的功能是将存储在存储器中的色度分割结果通过滤波器滤波后和比较器得到的值进行比较,将结果进行统一分割取平均值,进一步对深度图像的值进行修正,最后将图像处理结果保存起来。

图3 深度图像处理系统总体框图
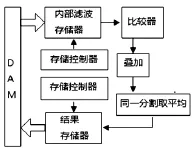
图4 深度图像滤波模块系统
3 播种机快速导航测试
在导航视频实时处理中,随着多核DSP的出现,视频并行处理效率得到了极大提升。在进行视频处理时,系统先将图像数据存放到外部存储器,然后将数据分配给不同的DSP内核进行图像深度处理,再将计算结果返回外部存储器。多核DSP系统的PC接口和相机接口分别连接相机和PC设备。图像深度处理主要用来定位播种机的导航线,从而实现自主作业。播种机导航流程如图5所示。
导航主要依赖图像处理对导航线的识别。对导航线的识别准确性与识别效率会直接影响播种机的作业效率。
为了验证多核DSP系统在播种机导航系统中对导航线定位识别时间和识别准确性的影响,对多核DSP图像处理系统进行了测试。硬件如图6所示。时间测试结果如表1所示。从表1可以看出:单核DSP处理时间最短为2.12 s,而多核DSP处理器处理时间最短仅为1.26 s。多核DSP处理器处理速度明显比单核处理器快,可以有效地提高导航的效率。
无人播种机导航精度测试结果如表2所示。由表2可以看出:单核和多核DSP处理系统都可以得到较高的导航精度。这是因为深度图像处理可以有效提高图像处理精度,从而让播种机更有效地识别导航位置线;采用多核DSP处理系统得到的导航精度比单核DSP处理系统更高,可以满足无人播种机导航系统设计的高精度需求。
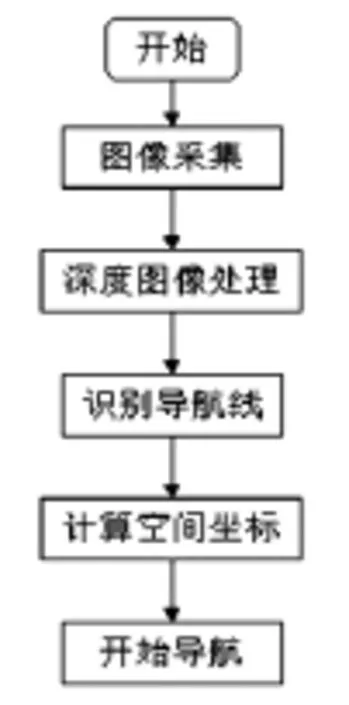
图5 导航流程图

图6 多核DSP系统硬件实物图

表1 快速定位标线时间测试
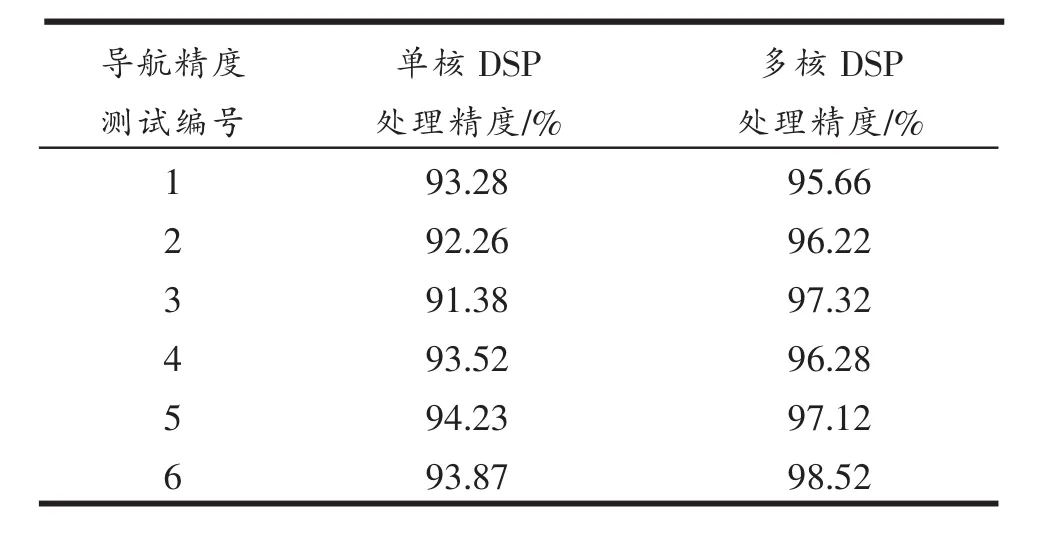
表2 导航精度测试
4 结束语
随着现代农业技术的发展,无人驾驶作业机械会越来越多。多核DSP深度图像处理技术对实现播种机无人驾驶作业具有重要的意义。为了提高播种机导航系统的效率和精度,本文将深度图像处理技术和多核DSP处理器引入到了播种机导航系统的设计上,并对方案的可行性进行了研究。实验结果表明:无论采用单核还是多核DSP处理器,使用深度图像处理技术都可以使播种机有较高的导航精度,相较而言,采用多核处理器的精度更高且可以有效缩短导航定位所需时间,提高导航效率。
