A review of aerial manipulation of small-scale rotorcraft unmanned robotic systems
2019-01-16XilunDINGPinGUOKunXUYushuYU
Xilun DING,Pin GUO,*,Kun XU,Yushu YU
aRobotics Institute,Beihang University,Beijing 100083,China
bDepartment of Mechanics and Maritime Sciences,Chalmers University of Technology,Gothenburg 41296,Sweden
KEYWORDS Aerial manipulation;Mechanical structure design;Modeling and control;Research groups;Small-scale rotorcraft unmanned aerial systems;Trends and challenges
AbstractSmall-scale rotorcraft unmanned robotic systems(SRURSs)are a kind of unmanned rotorcraft with manipulating devices.This review aims to provide an overview on aerial manipulation of SRURSs nowadays and promote relative research in the future.In the past decade,aerial manipulation of SRURSs has attracted the interest of researchers globally.This paper provides a literature review of the last 10 years(2008-2017)on SRURSs,and details achievements and challenges.Firstly,the definition,current state,development,classification,and challenges of SRURSs are introduced.Then,related papers are organized into two topical categories:mechanical structure design,and modeling and control.Following this,research groups involved in SRURS research and their major achievements are summarized and classified in the form of tables.The research groups are introduced in detail from seven parts.Finally,trends and challenges are compiled and presented to serve as a resource for researchers interested in aerial manipulation of SRURSs.The problem,trends,and challenges are described from three aspects.Conclusions of the paper are presented,and the future of SRURSs is discussed to enable further research interests.
1.Introduction
The use of small-scale rotorcraft robotic systems(SRURSs)is increasing rapidly in both scientific1and commercial fields.We typically define small-scale as being lighter than 25 kg or smaller than 10 m in any dimension;2rotorcraft refers primarily to helicopter and multirotor in this paper.In commercial fields,SRURSs are typically used for photography,agriculture,disaster monitoring,environmental surveillance,nuclear disaster response,3and electric power inspection.The United Business Media(UBM)4has indicated an approximate 40%increase in unmanned aerial vehicles(UAVs)during 2017-2018,similar to 2016-2017.It has been reported that approximately 587,000 UAVs were sold in 2015.In scientific fields,SRURSs are widely used for unknown environment modeling,5data acquisition,6and manipulation.7Compared to commercial SRURSs,scientific researchers interested in manipulation are more concerned with interaction with the environment.The physical interaction with the surrounding environment pre-sents a greater challenge to researchers,the most significant problem being the coupling between aerial platforms and manipulating devices.Aerial manipulation is creatively used in construction,8drawer operation,9object transporting,10,11valve turning,12tool operation,13ultrasonic testing,14unknown environment sensing,15bulb screwing,16bridge inspection,17wall climbing,18,19aerial writing,20perching and charging,anti-UAV combatting,delivering,and object assembling.
Searching for keywords in the Web of Science Core Collection,21it is observed that research related to UAVs and aerial manipulation has increased rapidly since 2011 as indicated in Fig.1.Performing a second search using specific keywords such as quadrotor and grasping indicates that from 2008 to September 2017,only 145 papers related to aerial manipulation were retrieved out of 8373 papers as displayed in Fig.2.However,there have been workshops at the top conference on robotics,namely the IEEE International Conference on Robotics and Automation(ICRA),every year from 2014 to 2017.22-25It is clear that the potential of aerial manipulation is high,and it remains both a frontier and valuable research direction.
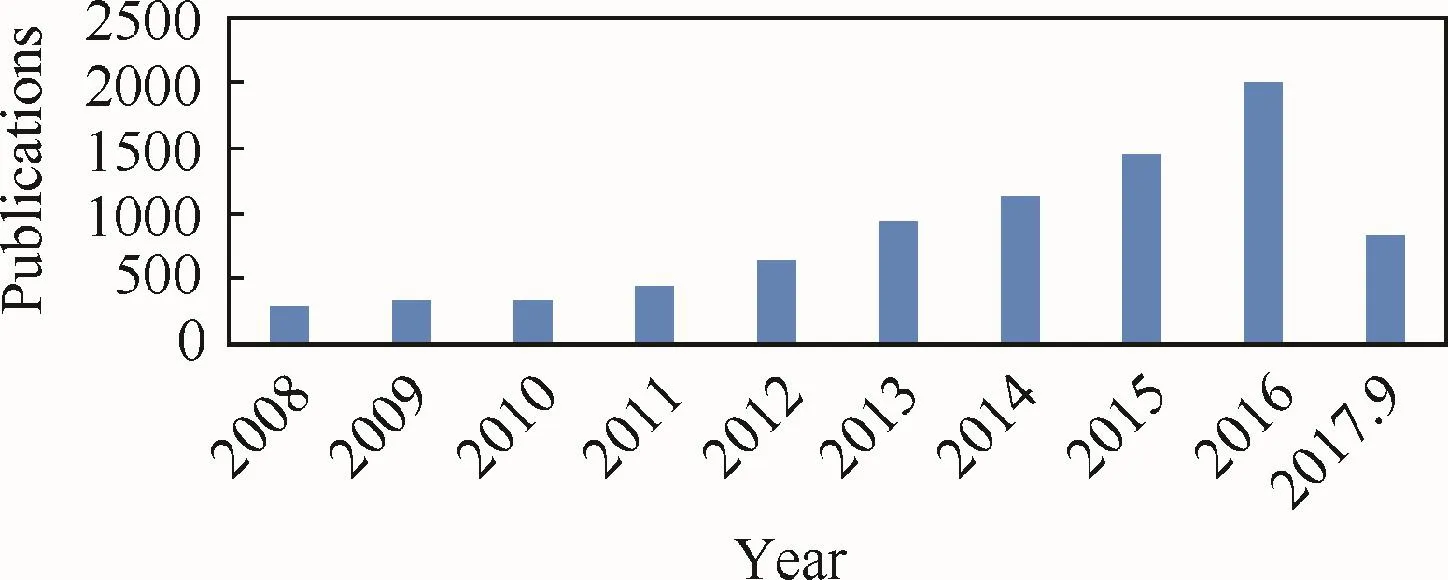
Fig.1 Publication search results in the Web of Science Core Collection.
With the development of aerial robot platforms,the demand for aerial robots is no longer confined to observe the environment in a passive manner.Aerial robots offer the abilities of rapid maneuvering and dexterous manipulation under complex working conditions and dangerous environmental conditions.Aerial manipulation can be summarized into two problems: flying and manipulating.Further,it typically consists of two types, floating base-like multirotor and actuator-like manipulator.SRURSs manipulating devices can be divided into four categories:gripper,multi-degree of freedom(DOF)rigid-body aerial manipulator,aircraft with a suspended load attached through a cable or tether,and others such as airframes or anthropomorphic fingers.Manipulation methods can be divided into four categories:grasp,interact,hang,and manipulate.
Universities and research institutions in the United States are typically sponsored by the National Aeronautics and Space Administration(NASA),26Defense Advanced Research Projects Agency(DARPA),27National Science Foundation(NSF),28Office of Naval research(ONR),29and other organizations.Universities and research institutions in Europe are commonly sponsored by projects from Horizon 202030and the 7th Framework Programme(7FP)31such as AI Robot,32ARCAS,33SHERPA,34and Aeroworks.35Other universities and research institutions are largely sponsored by foundations in their own countries such as the National Natural Science Foundation of China(NSFC)36and the National Research Foundation of Korea(NRF).37Because of the different requirements of sponsors and different development ideas of research institutions and universities,they typically proceed in a diverse directions.
Moreover,the development of UAVs has been further encouraged by UAV competitions.The MBZIRC 201738competition was successfully held in March 2017.Challenge 3 required a team of UAVs to collaborate to detect,locate,track,pick up,and place down a set of static and moving objects.The organizers offered five million dollars in prizes and sponsorships.The upcoming MBZIRC 2019 Challenge 1 is based on UAV dynamic aerial tracking and interventions in 3D.It will require a team of UAVs to autonomously locate,track,and interact with a set of objects moving in space.

Fig.2 Article comparison between two searches.
The first challenge of SRURSs when prototypes are developed is the mechanical structure design,which is both signifi-cant and interesting.Researchers globally have proposed many different ideas(see Section 2)including LEGO toys,39avianinspired designs,40compliant designs,15anthropomorphic designs,41fault-tolerant designs,42Delta mechanisms,14parallel mechanisms,43redundant designs,44tool designs of collaborative work,45KUKA manipulators,46vacuum pump selfsealing suctions,47and SHERPA grippers.48The primary consideration is the mechanical configuration design,because the movement of a manipulating device critically influences a UAV.A superior mechanical structure can reduce the complexity of the controller and coupling between the UAV and the manipulating device,hence improving the capability of SRURSs.
The major challenges in aerial manipulation are modeling and control.There are two approaches to address modeling and control problems.The first independent approach divides a system into two independent parts and considers the modeling methods of each part respectively.This approach considers the motion and dynamics of manipulating devices as external disturbances of UAVs;hence,it is easier to implement than an alternative.The second is an overall approach.It considers the complete system as an overall system,addressing challenges that the center of mass(COM)is changing constantly and the internal dynamics are coupled.The details of these two methods are introduced in Section 3.
To the authors’knowledge,this is the first time that a summarized review of aerial manipulation has been prepared.To provide an overview of the progress of aerial manipulation,achievements from researchers located globally are introduced in detail in Sections 2 and 3.
This paper is composed of six sections.The mechanical structure design of manipulating devices is introduced in Section 2,because the structure is the basis of control.Modeling and control methods are presented and compared in Section 3.In Section 4,works of principal universities and research institutions are presented in a tabular form.In Section 5,trends under multiple conditions and main aerial manipulation research challenges facing researchers are summarized.Finally,Section 6 provides conclusions and thoughts regarding the future of aerial manipulation.
2.Mechanical structure design
As mentioned above,manipulating devices can be divided into four types:gripper,manipulator,cable,and others.They are different from each other mechanically and regarding modeling and control,based on suitability for different application scenarios.The following subsections introduce these manipulating devices in detail.
2.1.Gripper

Fig.3 Example of SRURSs with a gripper from Yale University(picture from Ref.52).
eral grippers including impactive and ingressive grippers have been designed to grasp a number of different items including a beam and a flat piece of wood.51Impactive grippers demand that the freedom of the object to be grasped is adapted to the grippers;ingressive grippers are divided into actively engaging and passively engaging.A quadrotors team achieved a construction task using the gripper mentioned above as demonstrated.8A group of on-board vacuum suction cups was utilized to grasp a series of objects such as a battery and a hair brush,47including items on inclined surfaces.A mechanical coupling was used to reduce the complexity of the grasping mechanism on an adaptive underactuation gripper for a helicopter.42Furthermore,a gripper mounted on a helicopter and a quadrotor are compared;results indicated that the quadrotor could fulfill the condition of the gripper mounted above the airframe.52A ‘‘screwing bulb” experiment was performed by a multirotor with a gripper mounted above the airframe,16and an onboard FPGA was used to address the camera information.53,54An avian-inspired passive mechanism for a quadrotor and helicopter perching was presented;40,55the gripper consisted of three fingers imitating a songbird.Every knuckle was designed independently different from the others on the same finger so that the finger’s stiffness was most suitable for perching and grasping;however,the UAV on which the gripper was mounted did not actually move.A dynamic surface grasping technique was proposed for micro-UAV landing and perching;gecko-inspired directional adhesives were used to absorb the collision energy and provide secure perching.A dynamic model that predicts attachment conditions was presented.56-58A switch between climbing and perching modes was proposed,and the task of crawling on the wall was realized.A climbing mechanism was designed to allow a robot to recover from a climbing failure.19,59
As stated above,a gripper has the following disadvantages owing to its mechanical structure:(i)limited workspace and(ii)limited grasping ability of mass and volume.
2.2.Manipulator
As displayed in Fig.3,a single-DOF gripper is the most widely used manipulating device.It is attached directly on or under the airframe of a UAV.This kind of manipulating device has three advantages:(i)easy to build,(ii)convenient modeling and control,and(iii)relatively inexpensive.
To reduce costs,a low-cost,custom-built quadrotor was presented,39,49which used a LEGO50gripper to reduce the time of prototype development.It gripped a stuffed toy,weighing 150 g,50 cm below the quadrotor using the gripper.Sev-
A manipulator consists mainly of two parts:one or more multi-DOF arms attached to a UAV’s airframe and grippers with different kinds of sensors as illustrated in Fig.4.Typically,arms and grippers are driven by servomotors.A manipulator significantly expands the workspace compared to a gripper,and can utilize the redundancy of the manipulator to compensate for the position error of a UAV’s motion.It is a better choice for complex tasks.
Fig.4 Examples of SRURSs with a manipulator.
A typical robotic arm of a manipulator is a series-connected structure.Different-DOF arms have been developed for different applications.An avian-inspired 1-DOF arm was applied under a quadrotor to achieve bird-like grasping.60,61A simple 2-DOF arm was used to grasp a bottle in an indoor environment adopting VICON62markers,63which could manipulate an object in front of a UAV.Another 2-DOF arm was utilized for picking up and delivering an object,also under a VICON environment,in a dependent and cooperative manner.10,64,65Faced with the challenge of turning a valve for the DARPA Robotics Challenge(DRC),a dual 2-DOF arm was applied to a quadrotor;12,66the workspace of a UAV-manipulator system was beneath the UAV,and a target was located by visual servoing.With the assistance of a dual 2-DOF arm,a UAV achieved wall-climbing in a walking mode with a mechanical structure,but only in simulations.18,67,68Drawer and cylindrical objects under and in front of a multirotor were manipulated with a 3-DOF robotic arm using VICON and vision to locate a UAV and a target.9,69,70Another 3-DOF arm was used to accomplish a bridge detection task by contacting from the underside;17the arm was mounted on a UAV according to the property of the task.Aimed at improving the dexterity of a robot arm and compliance of joints,a lightweight compliant 3-DOF robotic arm was designed;15,41the mechanism of the elbow joint was based on an extension spring to realize collision detection,obstacle detection,and quality estimation of captured objects.Later,the mechanism of the elbow joint was improved by a simple transmission mechanism consisting of a pair of compression springs and a flange bearing.15A dual 3-DOF arm flying test was performed.71A novel mechanism considering the counterweight between a moving battery and a 6-DOF robotic arm was presented;72a flying and manipulating experiment was performed.73,74A 7-DOF robotic arm was installed on an octocopter to perform outdoor grasping experiments.75,76A fully actuated 7-DOF KUKA redundant industrial robotic arm was used for grasping objects utilizing its redundancy on a helicopter.46,77,78A 9-DOF hyper redundant has been designed for aerial manipulation;44however, flying experiments have not yet been performed.Further,parallel manipulators have been applied on UAVs.43

Fig.5 Example of SRURSs with a cable from University of New Mexico(picture from Ref.94).
A manipulator’s disadvantages can be concluded as follows:(i)complex mechatronics system,(ii)heavy weight;(iii)difficult to control,and(iv)severe coupling interference with a UAV.
2.3.Cable and others
As displayed in Fig.5,a cable or tether attached to a UAV is widely used in transporting;79-82however,only few of its mechanisms have been considered.Multi-aerial robotic manipulation experiments with cables or tethers were presented.83,84Researchers consider more the problem of how a slung-load’s motion changes a system’s COM and regard this as a control problem.For example,a reinforcement learning approach was adopted.85It will be introduced in detail in Section 3.
Many other manipulating devices have been presented by researchers globally.A novel mechanical design of a UAV’s manipulating device was presented to interact with the environment and perform ultrasonic non destructive experiments;14,86-88the mechanism consists of a 3-DOF Delta,a Cardan gimbal,and an end-effector.Anthropomorphic grasp was discussed to reduce the effects of gravity and inertia during a grasping process.89A novel aerial manipulation system was proposed to perform a tool operation task;the system was developed with multiple quadrotors connected to a tool through spherical joints.90A transporting express by a commercial company using a multirotor airframe was tested.91A flexible mechanism composed of active joints and passive linear joints was designed,which converts kinetic energy into potential energy;the energy is stored in a directional locking mechanism to reduce the impact of a UAV towards a wall.92,93
From the above,a cable or tether is most suitable when attention is paid to the control problem while manipulating.A gripper is easier to implement than a manipulator from the mechanical aspect.Further,a manipulator is ratherdifficult compared to other manipulating devices.Manipulating devices are compared in Table 1.

Table 1 Comparison between different manipulating devices.
3.Modeling and control
In early works,because the masses of manipulating devices(mainly grippers)and targets were relatively smaller than those of UAVs,researchers ignored the changes of the COM and inertia during a manipulating period;a flying controller was applied directly on the new aerial manipulation system.This could seem as one kind of ‘‘overall approach” in this paper.However,this is a simple and inexact modeling approach.It is called a simplified approach.
The independent approach separates a UAV and manipulating devices apart,and then builds models and controllers separately.As a result,the coupling between the UAV and manipulating devices is regarded as an interference problem.
This overall approach considers the coupling problem as an internal problem;it is extremely accurate and strict.The system model should be integral from the start of kinematics and dynamics modeling.
3.1.Independent approach
The independent approach utilizes the existing control algorithms of a UAV and manipulating devices,and modifies them to adapt the dynamics of a combined system.Hence,it reduces the time required for research.Moreover,the dynamics model of a system is not as complex as that of the overall approach;the interaction force is considered as external interference.This approach simplifies the modeling and control process.
A quadrotor model and a suspended load model were developed independently;a technique based on dynamic programming(DP)and an adaptive controller compensating for the change in the COM caused by load movement were proposed to ensure swing-free trajectory tracking.79,95To overcome the DP algorithm’s shortcomings of demanding accurate modeling and trajectory planning in advance,reinforcement learning algorithms such as AVI and LSPI were presented to generate trajectories with minimal residual oscillations for rotorcraft transporting suspended loads.85,96
The joint position’s motion range was determined by analyzing the stability change of a UAV originated from a manipulator’s movement.97
The model of an outer loop controller for helicopters and load was replaced by a simplified model based on interconnected mass points.For the first time,an experiment with three helicopters with suspended load transporting was performed in 2007.83,84
The redundancy of a 7-DOF manipulator was used to reduce the change of a system’s COM when the manipulator was moving.To address the coupling between the airframe and the manipulator,yaw was introduced into kinematic planning of the manipulator.A flying test by combing impedance control with visual servoing control on a helicopter with a 7-DOF KUKA manipulator was performed.46,77,78
The contact model was divided into three parts,i.e.,a quadrotor,a manipulator,and an environment,which were then combined by the contact point relationship.The attitude and position of the system were tuned by an impedance controller designed according to the passive characteristics of the system.86To solve the unstable problem of inner-loop dynamics caused by a former impedance controller,a modified impedance controller combines virtual quality with the external force dynamic model of a system.The mode of a manipulator was divided into a free- flight mode and a contact mode;a hybrid control method was used to switch between the two modes.87,88,98An LQR-optimized approach was proposed to replace the traditional PID control and to adapt the condition that forces acting consistently on the wall are similar to the UAV’s weight;however,the algorithm requires the contact point be static.92,93
A controller based on momentum estimation considering external forces was proposed;the gain of the estimator was chosen according to the closed-loop impedance behavior with a proper hierarchical structure.99The multilayer structure of the controller based on PID was presented.72
A variable parameter integral backstepping(VPIB)algorithm replaces PID control for compensating the motion of a manipulator.This controller guarantees asymptotic stability and has robustness to some uncertainties.Experimental results demonstrated that the VPIB controller was superior to the PID on a prototype.17,100
The Lagrange dynamics of a system were completely decoupled into two separate parts,the COM dynamics in E(3)and the internal dynamics between the quadrotor and the manipulator.Further,a backstepping-like controller was presented to track the trajectory of the end-effector.101
The trajectory linearization control(TLC)for a quadrotor and the inverse kinematics for manipulators were combined to achieve wall-climbing;the interaction between the main body and manipulators was reduced by an optimal planning strategy.18,68
3.2.Overall approach
The overall approach is divided into two parts in this paper as described in the following subsections,the simplified and overall approaches.The simplified approach directly applies the traditional control algorithm of a UAV to SRURSs,which is simple and easy to implement,but inaccurate.It is regarded as the early version of the overall approach.The overall approach considers SRURSs as a whole,yet complex.
3.2.1.Simplified approach
The estimates of the mass and offset COM of a system in the PID controller for a quadrotor with a gripper were presented.51A construction task was accomplished using the wavefront raster algorithm by the quadrotors team.8Avianinspired perching and grasping based on vision in a GPS-denied,VICON-denied environment were achieved.102,103
The contact between a helicopter and an environment is equivalent to a 6-DOF spring,and a PID controller was used for the helicopter grasping with a gripper.104,105The stabilities of helicopter grasping and quadrotor grasping were compared.Results indicated that the quadrotor was more sensitive to changes in the COM caused by the load;however,it can be applied to situations where the load must be placed above the COM of the airframe.52,106
A low-cost,home-built quadrotor grasping with a gripper was presented.A nested PID was used to overcome precise positioning,object sensing and manipulating,and stabilization caused by object interaction.39,49
3.2.2.Overall approach
For the first time,a complete dynamic model was developed for a UAV with a manipulator system.A modified Cartesian impedance control exploiting redundancy was presented to overcome the challenges of interference and aerodynamic modeling.107All the system dynamics of the coupled UAV and manipulator were considered for the first time.The low level layer was based on the back stepping-control theory,and the top layer was a visual servoing feedback controller based on an external image.108The controller was improved to adapt multi-cooperation SRURSs.109A hybrid control system combing visual servoing control with hierarchical task control was applied for aerial manipulation.110-112
A hybrid model was introduced to describe a quadrotor with cable-suspended load.Through the differentially flat theory,a nominal trajectory with different constraints was planned,so that the large-area dynamic motion of the quadrotor under the condition of swing load was possible.Then,tracking of the quadrotor’s attitude,the load’s attitude,and the position in the three-dimensional space was realized by geometric control.81,113
A lifting load process was divided into three parts,i.e.,setup,pull,and raise,using the related theory of hybrid systems and utilizing a discrete state to determine the key way point that must be passed through.95,114,115A smooth trajectory was generated using the minimum snap theory,116and an adaptive controller was designed by combining geometric control with the least-squares estimation theory.
A system is regarded as a hybrid system that is divided into four phases including flight,arm deployment,adaption,and manipulation phases,and different adaptive algorithms are applied to the different phases to ensure stability.A valveturning task was achieved by visual servoing control and gain scheduling.A Lyapunov-based model reference adaptive control(MRAC)method was introduced to address the changes of the COM and inertia,as well as the external disturbance during the manipulation.66,117The coupling between environment and SRURSs was divided into three categories including momentary coupling,loose coupling,and strong coupling.118
Addressing the requirement that different tasks require different impedance values,a controller structure that can change the impedance and adjust the contact force was proposed.Further,a free- flight controller was proposed to reduce the dependencies on position restrictions and lightweight manipulators.119,120
A rigid multi-body system was modeled on the Lie group,and optical trajectory control for aerial manipulation was
proposed.63,121,122
A modified VPIB algorithm considers full dynamic effects and variation of the mass distribution when a manipulator moves and adopts impendence control.The DGPS and cameras were used to replace VICON.Further,the closed-loop inverse kinematics(CLIK)was used on a SRURS manipulator.75,76
A behavioral controller based on null space-based behavioral(NSB)was utilized to integrate the motion between a manipulator and a quadrotor.73Another three-layer structure controller was proposed,and a manipulator was controlled by an impedance controller.74
A system model from free- flight to contacting on the wall was proposed,and a hybrid-MPC controller to control UAV docking and sliding on the wall was presented.Online data processing for state estimation and manipulating was addressed.123,124An aerial writing task was performed based on the hybrid-MPC controller proposed above.125,126
An adaptive sliding controller based on a traditional Lagrange modeling method was proposed.10An augmented adaptive sliding controller based on a closed-chain robot dynamics was presented for cooperative transportation of multiple SRURSs.64Online estimation of objects based on an augmented adaptive sliding controller was proposed.65An image based visual servo(IBVS)for SRURSs was presented to fulfill an indoor manipulation task.69,70Parametric dynamic movement primitives(PDMPs)and rapidly exploring randomized trees star(RRT*)were combined to address the multi-SRURS cooperation problem in an obstacle environment.127An disturbance-observer-derived external force estimation was proposed to estimate the swing angle of a multirotor suspended load.82
A visual servo control was presented for a multirotor;this processes data online with an onboard FPGA.16,53,54
A cable was modeled as an arbitrary number of different links using spherical joints,and a geometric nonlinear controller was used to control the position of the quadrotor with a suspended cable load.Then the model and control methods were applied to arbitrary numbers of quadrotors to achieve manipulation with cables.128,129
A coordinate-free dynamics model of a system was used to design a geometric controller to track the position and attitude of a cable-suspended load.An elastic spring model including stiffness and damping was developed to compare with the non-elastic model.Virtually global exponential tracking was achieved.130,131
A hybrid model of a system was established by dividing the flight-walking locomotion into three modes including flight mode,double-leg support phase,and single-leg support phase.A globally valid and continuous controller was designed directly on the Lie group for quadrotor manipulating with suspended load.67,80,132,133
In conclusion,the independent approach is not sufficiently accurate;however,it outperforms the simplified approach.The overall approach is most accurate,however,also most difficult.Increasingly more researchers are abandoning the simplified approach because its low accuracy can cause instability of SRURSs.The approaches are compared in Table 2.

Table 2 Comparison of different modeling and control methods.
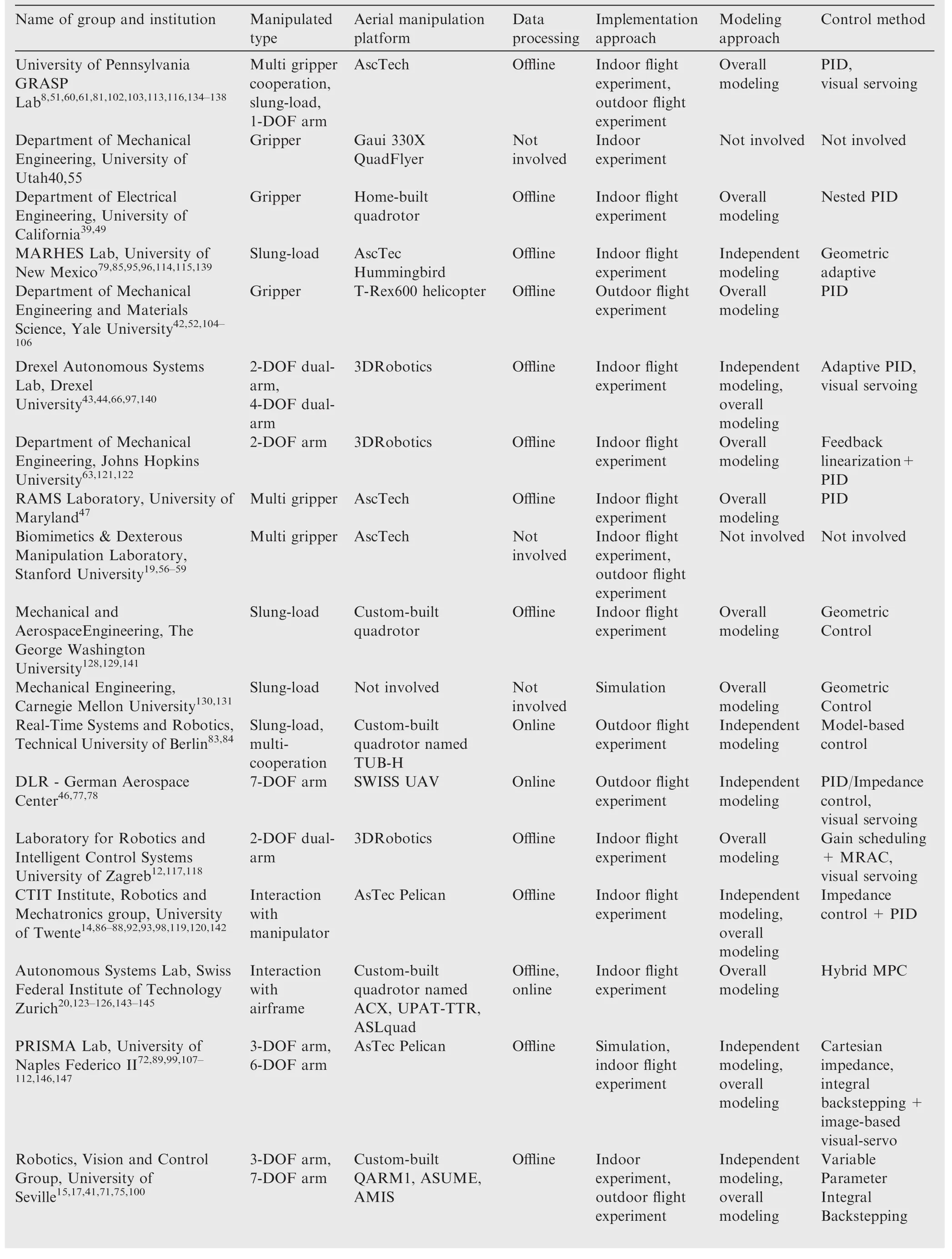
Table 3 Research groups involved in research of SRURSs.
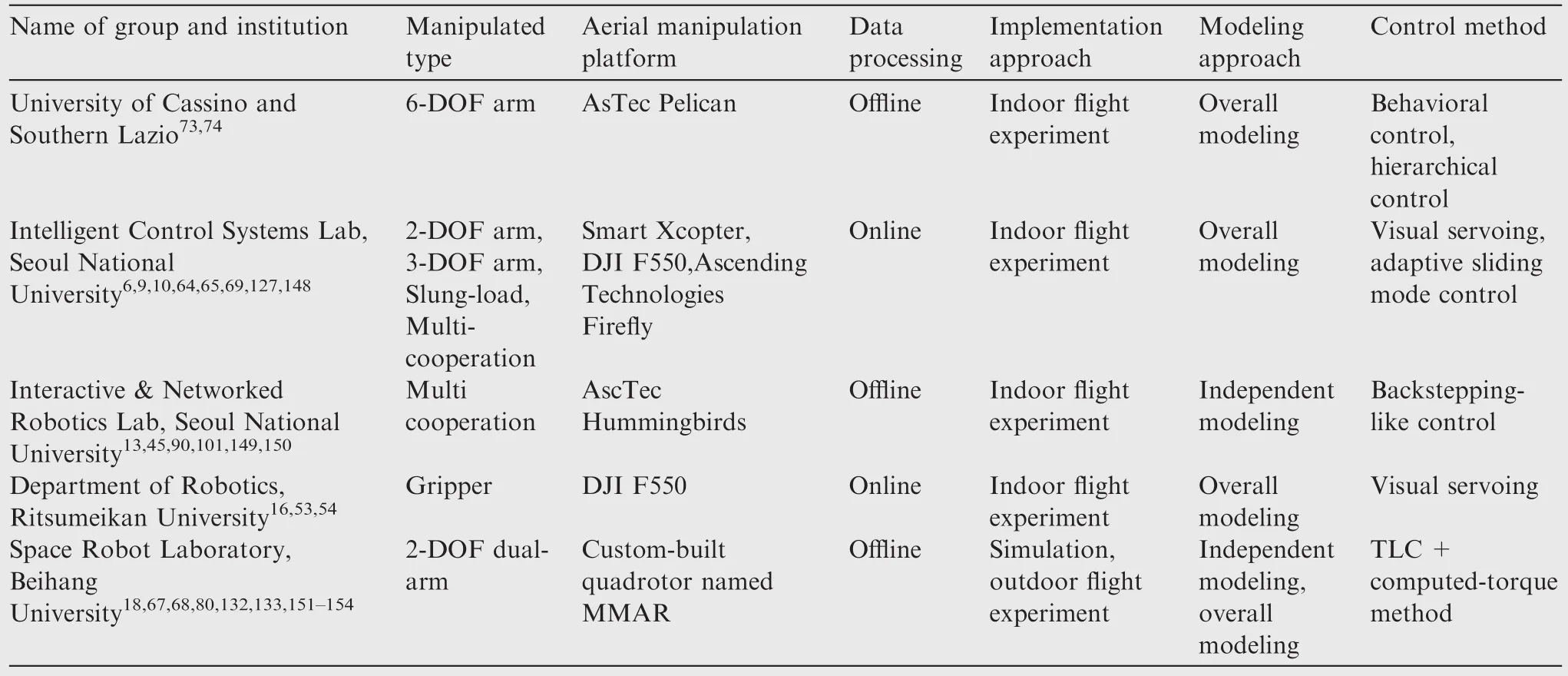
Table 3 (continued)
4.Research groups involved in SRURSs’research and major achievements
Numerous research groups have displayed interest in the field of aerial manipulation.Table 3 presents many of the research groups involved in the research and development of aerial manipulation of SRURSs.The majority of these have been introduced in Sections 2 and 3.The list is not exhaustive and excludes military and industrial research groups.
The achievements of these universities and research institutions are listed in Table 4.
From this table,we can observe that research institutions and universities in America are more interested in grippers and cables or tethers,which is a result of their simplicity in implementation,convenient modeling and control,and low cost.Conversely,research institutions and universities in Europe are more interested in manipulators because of the demands of Horizon 2020 and 7FP.The attentions of other research institutions and universities do not express systematic characteristics.
5.Trends and challenges
With the development of aerial manipulation,many types of problems appear when experiments and simulations are performed.To solve these problems,researchers globally present new,exciting ideas.With the ongoing development of research,numerous trends have been formed in many fashions.However,there remain many challenges on how to achieve aerial manipulation.Some of these have been addressed whereas others remain open.These are presented in Fig.6.
Before undertaking any new research,it is important to build a ground test platform for UAV flying and manipulating.A grasp multiple micro-UAV(MUAV)testbed was introduced,and aerial manipulation was studied on MUAVs with grippers utilizing the testbed.135A 6-DOF miniature gantry crane imitating the flight of a UAV with two manipulators was presented.97A low-cost,simplified quadrotor test bench for 6-DOF flight was proposed.These test platforms can reduce a research period significantly.151
For manipulating devices and DOF choices,researchers are increasingly drawn to two extreme cases.One is the simplest case of a gripper,especially for an MUAV,which faces the challenge of limited manipulating space.The other is a manipulator for the accuracy of manipulation.The challenges they must address are complex modeling and control of SRURSs,and severe interference from a manipulator to a UAV.Both of these cases meet the challenge of how to realize fault tolerant grasping under the error condition of an end-effector.
The development of hardware and visual algorithms has been rapid in recent years.Aerial manipulation has a strong and special requirement for the hardware of perception as follows.(1)Aerial manipulation with SRURSs demands higher accuracy than a normal UAV.Not only must the UAV be stable,but also the manipulating device and the UAV must be extremely accurate.(2)Aerial manipulation with SRURSs demands lighter payload.This is because the total load capacity of an SRURS is limited,and manipulating devices and payload further reduce the restricted payload.(3)Aerial manipulation with SRURSs demands better sensors.It is important to realize onboard perception and processing;however,the hardware and visual algorithms are limited mainly because of the weight of the hardware and the processing speed.It remains a challenge to achieve complete real-time and accurate perception and processing with on board sensors.A VICON camera has a strong dependence on the environment,which limits the sizes of SRURSs;it also limits the application scene to indoor locations.VICON is slowly being replaced by visual cameras and DGPS.As processors advance,on-board FPGA and PC104 will facilitate processing data from offline to online.Omitting the data transmission segment such as WIFI and XBEE155increases the real-time performance of a UAV.This means that aerial manipulation is moving a step further toward industrial applications and intelligence.There remain three challenges to be resolved for the perception,localization,and data processing problem,which are fusion and filtering of multiple sensors,on board
vision algorithms and planning,and calculation speed together with the real-time problem of online data processing.
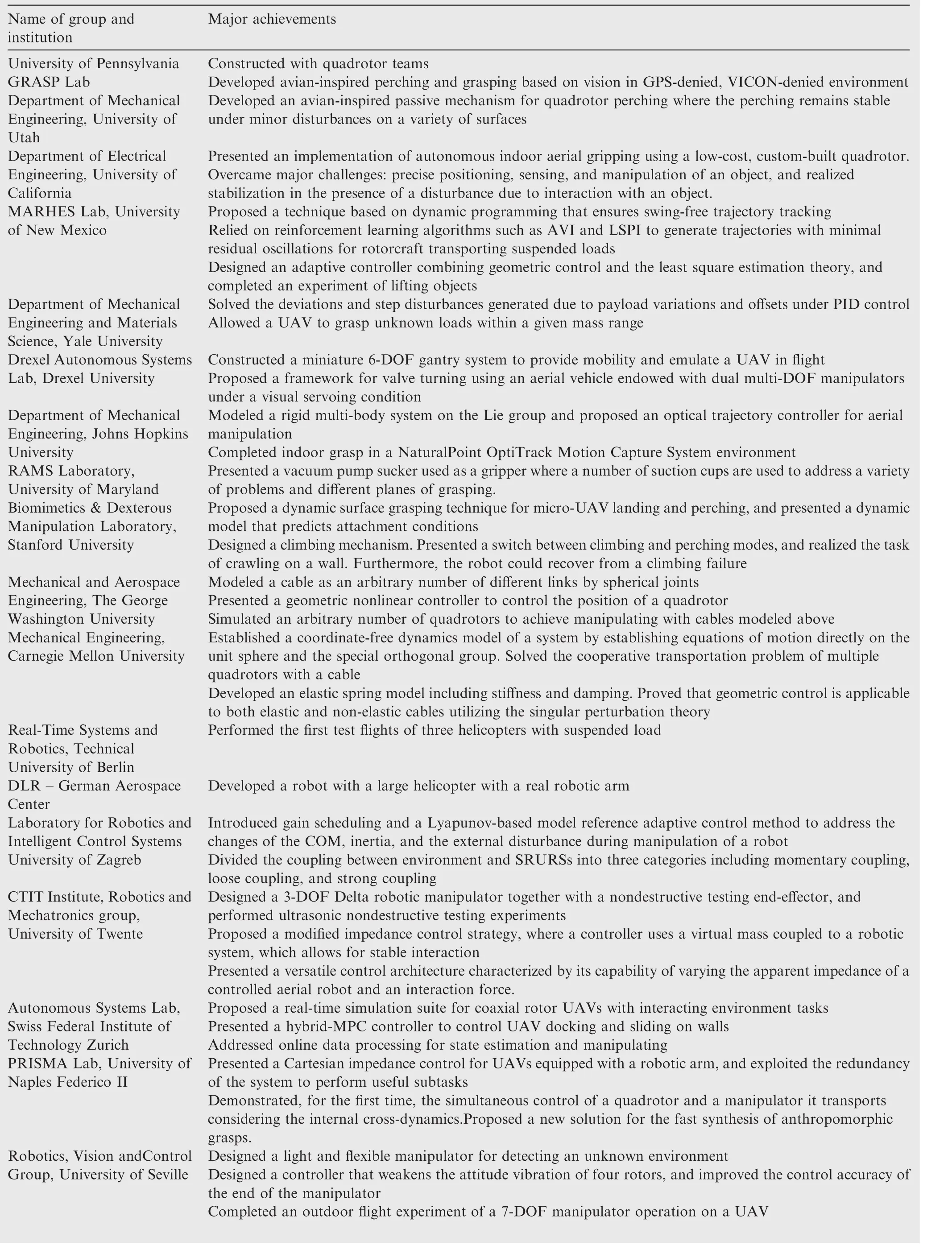
Table 4 Major achievements of research groups.
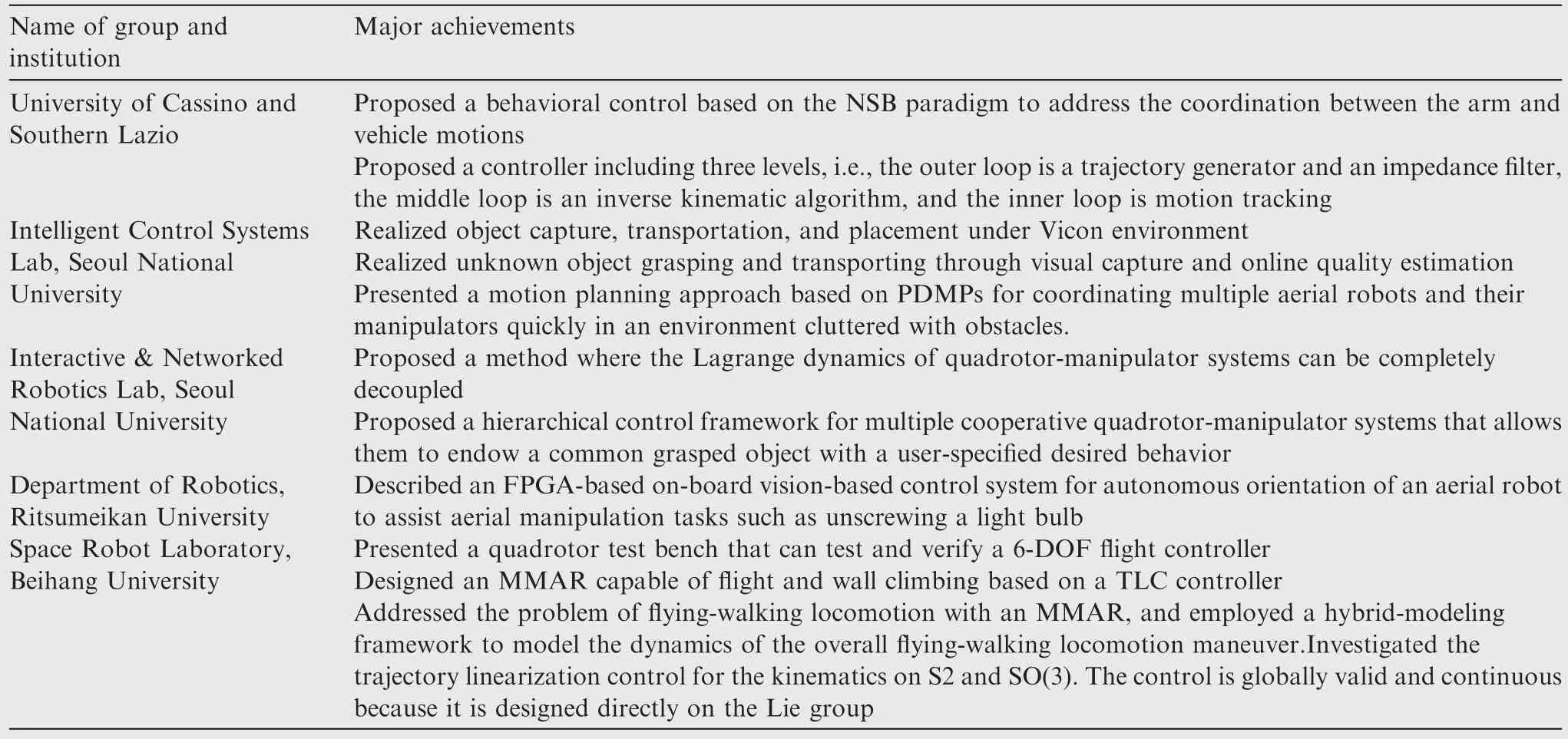
Table 4 (continued)
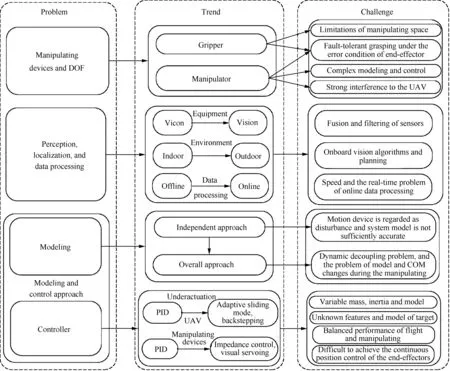
Fig.6 Problems,trends,and challenges.
Modeling and control approaches have been introduced in detail in Section 3.Increasingly researchers are adopting the overall approach for high accuracy.The independent approach faces the challenge that the system model is not sufficiently precise.Although the overall approach should solve the dynamic decoupling problem,model and COM changes during manipulating continue.Meanwhile,controllers for UAVs and manipulating devices have been developed from early time PID to the present situation.Now adaptive sliding mode control and back stepping control are used for UAVs,while impedance control and visual servoing control are used for manipulating devices.A controller should address the following challenges:(i)variable mass,inertia,and model,(ii)unknown features and model of a target,(iii)balanced performance of flight and manipulation,attempting to achieve agile flight with a heavy payload at the same time as providing accurate and stable manipulation,and(iv)continuous position control of the end-effector is difficult to achieve because an under actuated multirotor cannot control the position and attitude simultaneously.
6.Conclusions and future
This paper presented a literature review of small-scale rotorcraft unmanned aerial robotic systems.The research state was introduced.Works on aerial manipulation of SRURSs were presented in three fashions.Mechanical structure design included three parts:i)grippers,ii)manipulators,and iii)cables and others.Modeling and control approaches were divided into two parts,independent and overall approaches including the simplified approach.Relative research groups and major achievements were presented in figures and tables for easy access.Problems,trends,and challenges were concluded and presented.
The overall approach is the trend of modeling approach,and increasingly more and more researchers are addressing SRURSs with manipulators.It can be forecasted that researchers will continue research on SRURSs with manipulators using the overall modeling approach in the future.
In fact,significant work remains to be undertaken in the future.This includes aerial manipulation of moving objects,anti-UAV combat ting by aerial manipulation,and air ground mobile cooperative manipulation.Furthermore,only a small number of industrial and commercial applications have been presented.There remains a significant amount of future research into aerial manipulation of small-scale rotorcraft unmanned aerial robotic systems.
Acknowledgment
This work was supported by the National Natural Science Foundation of China(Nos.91748201 and 51505014).
杂志排行

CHINESE JOURNAL OF AERONAUTICS的其它文章
- Recent development of casing treatments for aeroengine compressors
- Recent advances in physical understanding and quantitative prediction of impinging-jet dynamics and atomization
- General aspects on structural integrity
- Design and simulation of an innovative cylinder fabricated by selective laser melting
- Application of reliability technologies in civil aviation:Lessons learnt and perspectives
- FEC design for remote control and data transmission of aeronautic and astronautic vehicles