PSO优化三维Otsu森林冠层图像快速分割算法
2019-01-14朱良宽邵思协景维鹏刘亮
朱良宽 邵思协 景维鹏 刘亮
摘 要:森林冠层图像分割是采用数字图像处理方法获取森林冠层参数的关键步骤,针对林木冠层鱼眼图像背景复杂、分辨率高的特点,提出一种PSO优化三维Otsu法的森林冠层图像分割算法,将传统三维OTSU进行分解,以减少运算时间和存储空间,并利用PSO算法优化二维Otsu求取阈值过程。实验结果表明:提出的算法能够快速并准确地分割森林冠层鱼眼图像,尤其在树梢细节区域分割效果更好。所提方法可为林木冠层参数测量提供技术支持。
关键词:森林冠层图像;图像处理;自动阈值分割;三维Otsu法;粒子群优化
DOI:10.15938/j.jhust.2019.05.021
中图分类号: TP391.4
文献标志码: A
文章编号: 1007-2683(2019)05-0128-06
Forest canopy image segmentation is a key step to forest canopy parameters using digital image processing methods. According to the characteristics of forest canopy fisheye images with complex background and high resolution, this paper proposed a PSO-optimized forest canopy image decomposition Otsu method 3D segmentation algorithm. In this method, the 3D OTSU was decomposed, which reduced the computing time and storage space, and the PSO algorithm was adopted to optimize the two-dimensional Otsu to obtain the threshold process. Experimental results showed that the algorithm proposed in this paper can quickly and accurately segment the fisheye images of forest canopy, especially in the details of treetops. The proposed method can provide a technical support for forest canopy parameters measurement.
0 引 言
隨着现代林业发展,林木冠层参数成为森林生态系统相关研究的主要内容,具有重要意义。作为群落外观的可视化判断指数,林木冠层参数已被广泛应用于森林生态系统的相关研究中[1-2],并占据着非常重要的地位[3]。冠层结构的各项参数,能够直接反映植被的生长能力,对于森林氧气释放速率[4]、固碳效率和水土保持能力的测量与计算提供了极大的帮助,为森林生态系统的各项指标估计测量提供十分重要的相关参考依据。
林木冠层参数主要包括叶面积指数、森林郁闭度、丛生指数、叶倾角等。叶面积指数(leaf area index,LAI) 是用来表征林木冠层相应结构的变量。森林中树木叶片的蒸发、蒸腾和光合作用等很多的环境生态功能都与其自身叶面积的大小密切相关。叶面积指数深刻影响着生态系统中的冠层内和冠层下的微环境,发挥着控制水和碳的交换、辐射衰减、冠层水截留的作用,对于生物地理化学循环具有十分重要的意义[5]。
近年来,植物冠层图像分割方法的研究和应用日益得到关注,傅隆生等[6]提出了一种适用于猕猴桃采摘机器人夜间识别的方法,在图像分割环节中使用Otsu阈值法将采集到的猕猴桃果实图片中果实果萼部分分割出来;Carlos Poblete-Echeverria等[7]通过对比试验,比较K-均值,人工神经网络(ANN),随机森林(Rforest)和光普指数(SI)四种分类方法在人工葡萄园冠层图像分割中的性能;W.S.Qureshi等[8]在所获取的芒果树冠层图像中分割出芒果过程中对比使用邻近算法(KNN)和支持向量机算法(SVM)的分割效果。
在众多的分割算法中,阈值分割法为使用普遍且简单有效的分割方法之一。在阈值分割法中的最大类间方差法使用广泛,自1978年由Otsu(大津展之)提出的一维最大类间方差法[9]后,由于该方法分割效果好、适用范围广并且简单有效,近些年得到了广泛的应用,但一维的大津算法对于目标背景灰度区别不明显时存在较大的分割错误。因此一些学者提出了二维Otsu法[10] 和三维Otsu法[11],有效地提高了抗干扰能力,改善了算法的鲁棒性。也有一些学者在此基础上进行优化改进,或将优化后的算法应用于不同领域。Guo Weiya等[12]结合滤波器和优化粒子群算法对二维大津阈值算法进行改进,实验结果表明改进后的算法比传统的递推算法有更好的分割精度和更短的分割时间。范朝冬等[13]将改进的斜分Otsu法应用于回转窑火焰图像分割,提高了图像分割的抗造性和速度。Qiao Naosheng,Sun Ping[14]利用大津阈值分割算法对PCB光电图像进行分割,提出了一种改进的大津阈值算法并对其基本原理和分割优点进行详细分析,并进行定量评价分析分割,结果表明改进的大津阈值算法处理效果更好。Wei等[15]结合滤波器和优化粒子群算法(PSO)对二维大津阈值算法进行改进,实验结果表明改进后的算法比传统的递推算法有更好的分割精度和更短的分割时间。
由于林木背景复杂,冠层结构复杂导致透光效果不均匀,会产生光照不均现象,因此更需要精确的分割精度以获取冠层参数。基于此,本文首先采用三维Otsu法进行冠层图像分割;另外考虑到三维Otsu法推广能力偏弱,计算复杂度较高,鲁棒性和实时性也存在一定提升空间,因此本文结合PSO算法的优势,提出一种基于PSO优化的三维Otsu法的分割算法,优化了阈值求取过程。最后通过森林冠层图像分割实验对所提算法的可行性与有效性进行了分析。
1 传统三维Otsu法
1.1 算法的基本介绍
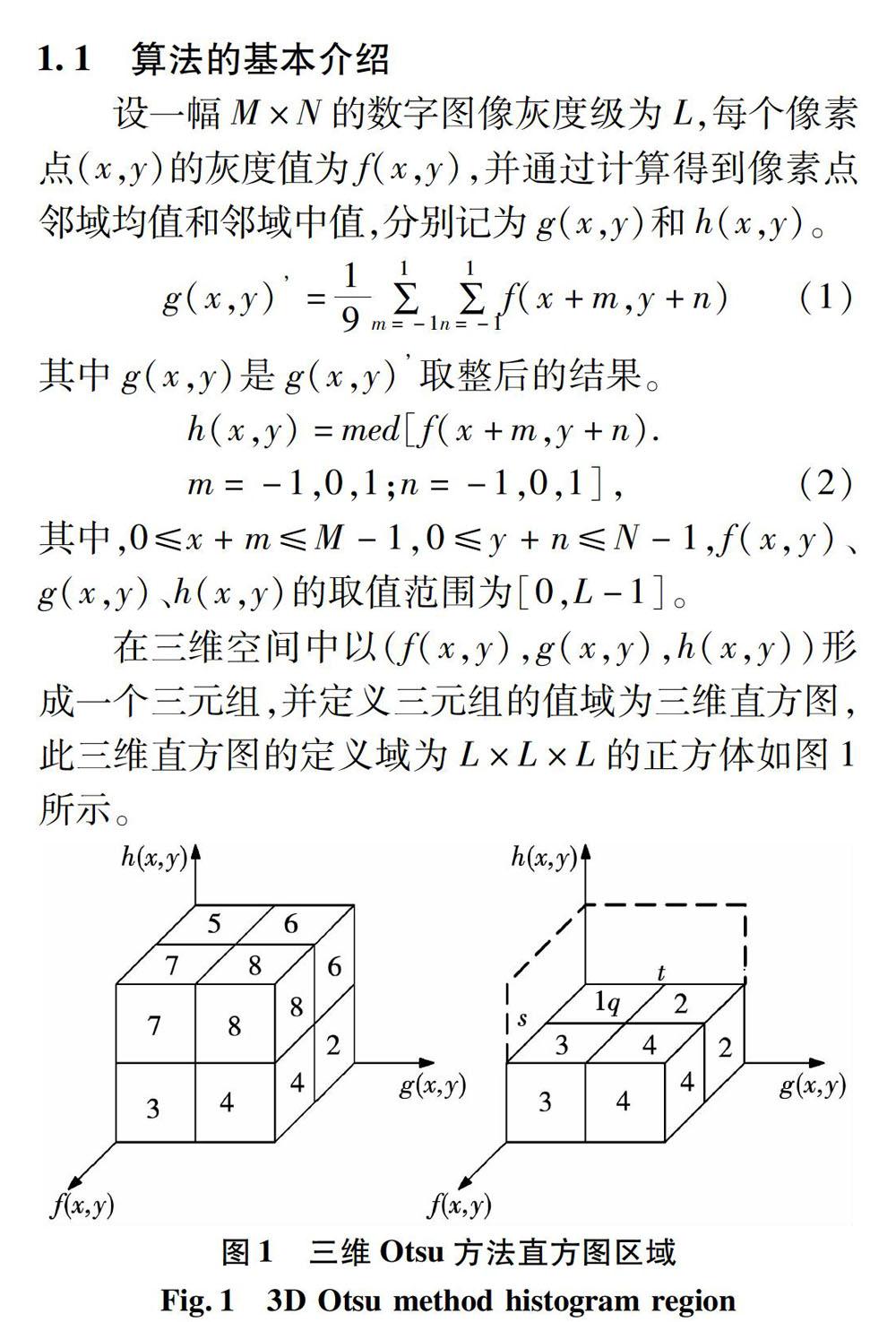
设一幅M×N的数字图像灰度级为L,每个像素点(x,y)的灰度值为f(x,y),并通过计算得到像素点邻域均值和邻域中值,分别记为g(x,y)和h(x,y)。
1.2 传统三维Otsu法的不足
对比一维、二维Otsu方法,传统三维Otsu方法在图像分割时加强了对噪声的去除,但也同时在林木冠层图像处理中仍存在着一些不足之处:由于维度为三,使得计算较复杂度,相应分割所需要的时间较,影响实时性;其所需存储空间较大,在实际项目中难以得到应用。
2 基于PSO优化的三维Otsu法的森林冠层图像分割算法
粒子群算法[16](particle swarm optimization, PSO)的原理是通过群体中个体之间的协作和信息共享来寻求最优解,具有算法设置参数少、实现过程简单、精度高、收敛速度快的等优点,应用广泛[17-20]。算法假设优化问题为D维搜索空间中随机生成的i个粒子,每个粒子携带一个二维信息,分别是粒子的位置和速度,速度决定粒子的飞行距离和方向,粒子根据所规定的适应度进行迭代匹配最优值,在迭代中根据曾到达的最好位置和种群的最好位置进行修正。
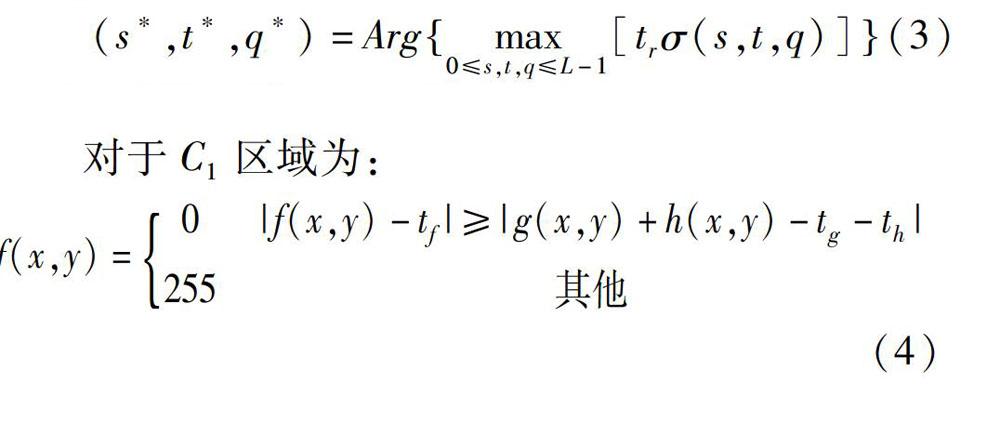
本文首先对三维Otsu法进行降维处理[21],分解为一个一维Otsu法和一个二维Otsu法,求得阈值tf和阈值对(tg,th),这三个阈值构成两个平面将三维区域分割出目标和背景;进一步,采用基于粒子群优化的二维Otsu法求取阈值对(tg,th)。
步骤1:对三维Otsu阈值分割算法进行降维处理
将传统三维Otsu定义的像素点(f(x,y),g(x,y),h(x,y))在定义域L×L×L的三维空间中进行区域投影,将像素点投影到平面f(x,y)=tf,和平面g(x,y)+h(x,y)=tg+th上,即将三维的Otsu阈值法分解为一个一维和一个改进的二维Otsu法,判断点面之间距离来划分属于目标区域还是背景区域,如图2。
二维阈值分割采用二维曲线阈值型Otsu方法,如图3所示,曲线C=r(i,j)是一条经过(s,t)的曲线,曲线C将图像分成A0和A1两块区域,A0和A1分别是图像的目標与背景,两区域的概率和有p0+p1=1。为了方便计算,选用直线L*代替曲线,直线L*垂直于定义域对角线,经过最佳阈值点(s*,t*)。在对图像每个像素点遍历求最佳阈值(s*,t*)过程中根据特殊直线分割的几何性质可以只需遍历二维直方图的主对角线和一条次主对角线。
设二元组(i,j)出现的联合概率密度pij,其中,N为像素的总个数,有∑Ni=1∑Nj=1pi,j=1,假设过阈值点(s,t)的曲线C=r(i,j)将定义域分为两个类型,分别为目标区域A0和背景区域A1,这两区域有着不同的概率密度函数分布,这两类出现的概率分别为:
使用粒子群算法(PSO)寻求最优阈值(s*,t*),在二维解空间中,每个粒子的位置为xi=(xi1,xi2),表示阈值(s,t),速度为vi=(vi1,vi2),表示粒子在二维解空间中位置移动的速度,对应的目标函数为公式(13)作为来评价该粒子优劣程度的适应度。
粒子位置从 (0,255)之间随机产生,速度在(-vmax,vmax)之间随机产生,设置最大迭代次数为Nmax,最大惯性因子为ωmax,最小惯性因子为ωmin,初始化q=0;计算该粒子类间的适应度,更新每个粒子的个体极值和整个粒子群的全局极值,其中,q表示迭代次数,个体极值ρBest和全局极值δBest是在直至q次迭代时刻,粒子i找到的最优阈值和整个粒子群所找到最优阈值;根据以下公式更新惯性因子:
3 实验结果与分析
3.1 实验材料
本研究的林木冠层图像来源于凉水实验林场,由带有鱼眼镜头的图像采集设备获得分辨率为3264X22448的原图。中国黑龙江凉水国家级自然保护区(N47°10′50″, E128°53′20″)是东北林业大学进行实验研究教学的重要基地,年平均气温-0.3℃,林木种类包括白桦次生林、阔叶红松林等。
3.2 实验结果与分析
通过实验对比发现:使用本文方法分别对阔叶林和针叶林的森林冠层鱼眼图像的分割效果要比文[14]中的分解三维Otsu法更为有效。
同时,为进一步对比两者方法对图像分割的差异,阔叶林冠层鱼眼分割图像以图5(a)为例,针叶林冠层鱼眼分割图像以图5(b)为例,提取两幅分割后图像的局部图像观察,结果如图7所示。图7中图(a)(b)(c)(d)分别是冠层图(1)和(2)局部图像位置示意图中标出的四个方框内图像放大效果图,是提取分割结果图的局部细节图,细节图主要选取树枝部分和树干部分观察其分割效果,每组的三幅局部图片分别是原图、文[14]的分解三维Otsu法分割后局部图片和本文方法分割后局部图片。可以发现:相对于另外两种分割算法,本文方法对于细节处理在分割效果上有较大提升。
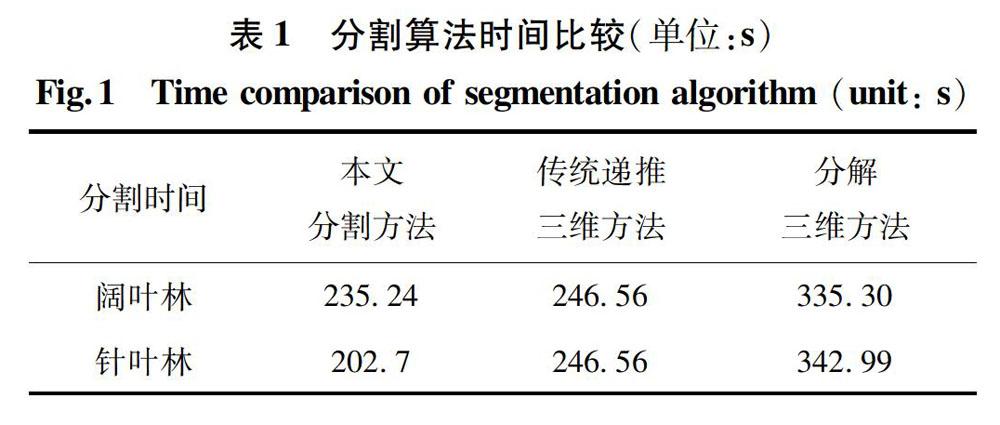
另外,为进一步验证算法的分割效率,分别采用传统递推三维Otsu分割方法、分解三维Otsu分割方法以及本文方法对相同的冠层图像进行分割实验效率对比,分割算法时间是取十副不同的森林冠层图像处理的平均结果数据。其中传统递推三维Otsu分割方法在遍历每个像素的过程中采用了迭代递推法,分解三维Otsu分割方法是将传统三维分解为一维和二维Otsu分割法。分割效率比较结果如表1所示,可以看出:本文的分割算法对同一组森林冠层鱼眼图像的分割平均时间约为220s,比传统递推三维Otsu分割算法速度提高了约6%,比分解三维Otsu分割算法提高了约38%。
4 结 论
本文首先介绍了传统三维Otsu方法,分析了传统三维Otsu方法的不足,然后结合PSO算法对其进行改进。通过分解降维,得到一个一维度和一个两维度,并采用PSO算法获取二维最优阈值。实验结果证明:所提改进方法能够提取出森林冠层鱼眼图像的有效区域,且具有良好的分割效果和效率。本文的研究成果对于林木冠层参数的快速准确测量具有一定的参考价值。
参 考 文 献:
[1] BRUSA A, BUNKER D E. Increasing the Precision of Canopy Closure Estimates from Hemispherical Photography: Blue Channel Analysis and Under-exposure [J]. Agricultural & Forest Meteorology, 2014, 195-196(6):102.
[2] LOFFREDO N, ONDA Y, HURTEVENT P, et al. Equation to Predict the 137 Cs Leaching Dynamic from Evergreen Canopies after a Radio-cesium Deposit[J]. Journal of Environmental Radioactivity, 2015, 147:100.
[3] 李德志, 臧润国. 森林冠层结构与功能及其时空变化研究进展[J]. 世界林业研究, 2004, 17(3):12.
[4] 孙同高, 李丽冰, 张亨,等. 基于粗糙集的林木水分生理和冠层结构对净光合速率的影响研究[J]. 生态环境学报, 2015(7):1137.
[5] 王希群,马履一,贾忠奎,徐程扬.叶面积指数的研究和应用进展[J].生态学杂志,2005(5):537.
[6] 傅隆生, 孙世鹏, Vázquez-Arellano Manuel,等. 基于果萼图像的猕猴桃果实夜间识别方法[J]. 农业工程学报, 2017, 33(2):199.
[7] POBLETEECHEVERRA C,OLMEDO G,INGRAM B,et al.Detection and Segmentation of Vine Canopy in Ultra-High Spatial Resolution RGB Imagery Obtained from Unmanned Aerial Vehicle (UAV): A Case Study in a Commercial Vineyard[J]. Impact Factor,2017,9(3):268.
[8] QURESHI W S, PAYNE A, WALSH K B, et al. Machine Vision for Counting Fruit on Mango Tree Canopies [J]. Precision Agriculture, 2016, 17(3):1.
[9] OTSU N. A Threshold Selection Method from Gray-level Histograms [J]. IEEE Transactions on systems, man, and cybernetics, 1979, 9(1): 62.
[10]劉健庄, 栗文青. 灰度图象的二维Otsu自动阈值分割法[J]. 自动化学报, 1993, 19(1):101.
[11]景晓军, 李剑峰, 刘郁林. 一种基于三维最大类间方差的图像分割算法[J]. 电子学报, 2003, 31(9):1281-1285.
[12]GUO W Y, WANG X F, XIA X Z. Two-dimensional Otsu′s Thresholding Segmentation Method B ased on Grid Box Filter [J]. Optik-International Journal for Light and Electron Optics, 2014, 125(18):5234.
[13]范朝冬, 张英杰, 欧阳红林,等. 基于改进斜分Otsu法的回转窑火焰图像分割[J]. 自动化学报, 2014, 40(11):2480.
[14]QIAO N, SUN P. Study of Improved Otsu Algorithm and Its Ration Evaluation Analysis for PCB Photoelectric Image Segmentation [J]. Optik-International Journal for Light and Electron Optics, 2014, 125(17): 4784.
[15]GUO W Y, WANG X F, XIA X Z. Two-dimensional Otsu′s Thresholding Segmentation Method Based on Grid Box Filter[J]. Optik International Journal for Light and Electron Optics, 2014, 125(18):5234.
[16]KENNEDY J, EBERHART R. Particle Swarm Optimization[M]. Springer US, 2011.
[17]MASDARI M, SALEHI F, JALALI M, et al. A Survey of PSO-Based Scheduling Algorithms in Cloud Computing[J]. Journal of Network & Systems Management, 2017, 25(1):122.
[18]CHEN S M, JIAN W S. Fuzzy Forecasting Based on Two-factors Second-order Fuzzy-trend Logical Relationship Groups, Similarity Measures and PSO Techniques[J]. Information Sciences, 2016(391/392):65.
[19]GUEDRIA N B. Improved Accelerated PSO Algorithm for Mechanical Engineering Optimization Problems[J]. Applied Soft Computing, 2016, 40(40):455.
[20]SYAHPUTRA R, SOESANTI I. Power System Stabilizer Model Based on Fuzzy-PSO for Improving Power System Stability[C]// International Conference on Advanced Mechatronics, Intelligent Manufacture, and Industrial Automation, IEEE, 2016:121.
[21]徐青, 范九伦. 新的基于分解直方图的三维Otsu分割算法[J]. 传感器与微系统, 2017, 36(1):119.
(编辑:温泽宇)
