一种高压室消防机器人
2018-12-26,,,,
, , , ,
(1.深圳供电局有限公司, 广东 深圳 518001; 2.中国科学院沈阳自动化研究所机器人学国家重点实验室,辽宁 沈阳 110016)
0 引言
高压配电室作为变电站的核心区域[1-2],安装有起开闭和分配电能作用的高压配电装置。随着我国电力需求量的不断增长、电网规模的不断扩大,无人值守变电站越来越广泛。当发生起火、冒烟或不明原因断电时,抢修人员无法靠近事故现场第一时间处理。
为解决该问题,开展了高压室消防机器人设备[3-6]的研究。机器人设备主要由地面移动车和控制终端组成[2,7-11]。地面移动车搭载消防装置完成对高压室电柜观察窗的破拆和消防处理,提高了高压室的消防处理效率,减少了人员意外伤害,为变电站高压配电室安全运行提供了可靠的保障。
1 高压配电室消防机器人系统
消防机器人的主要任务是完成对高压配电室的状态监测和消防作业,因此消防机器人系统主要由消防机器人本体和控制终端组成[12-13]。2个子系统的基本功能如图1所示,操作人员可以通过远程控制终端遥控消防机器人进行作业,消防机器人在移动过程中可自主避障和自主靠近对齐配电柜。消防机器人可通过带有红外功能的摄像头设备对环境信息进行采集,并实时上传至控制终端[9]。当发生火情时,消防机器人可及时到达着火地点,对观察窗进行破拆并灭火。
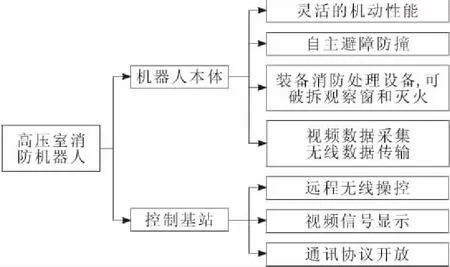
图1 消防机器人系统
与消防机器人的基本功能相对应,机器人系统需要包括机械本体、驱动系统、控制系统和上位机软硬件等,系统的组成如图2所示。其中,控制系统包括主控制模块、运动控制模块、传感器模块、图像采集模块和消防处理模块;上位机软硬件包括无线通讯模块、图像显示模块、图像接收模块和信息显示模块。
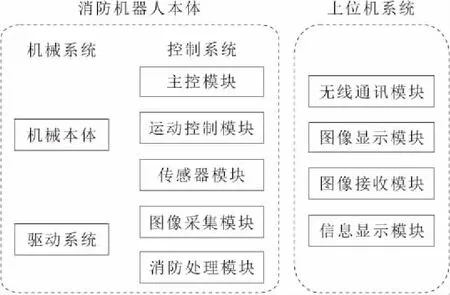
图2 系统的组成
2 消防机器人本体设计
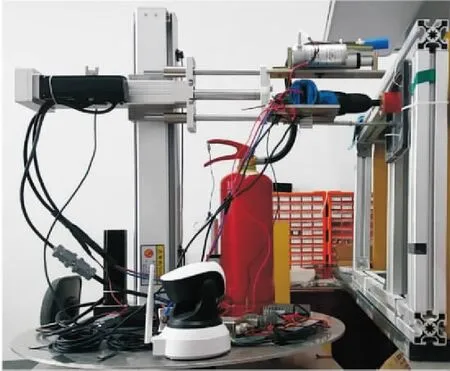
为了实现破拆和灭火功能,消防机器人由可任意半径转向的移动车体和末端执行装置组成,如图3所示。
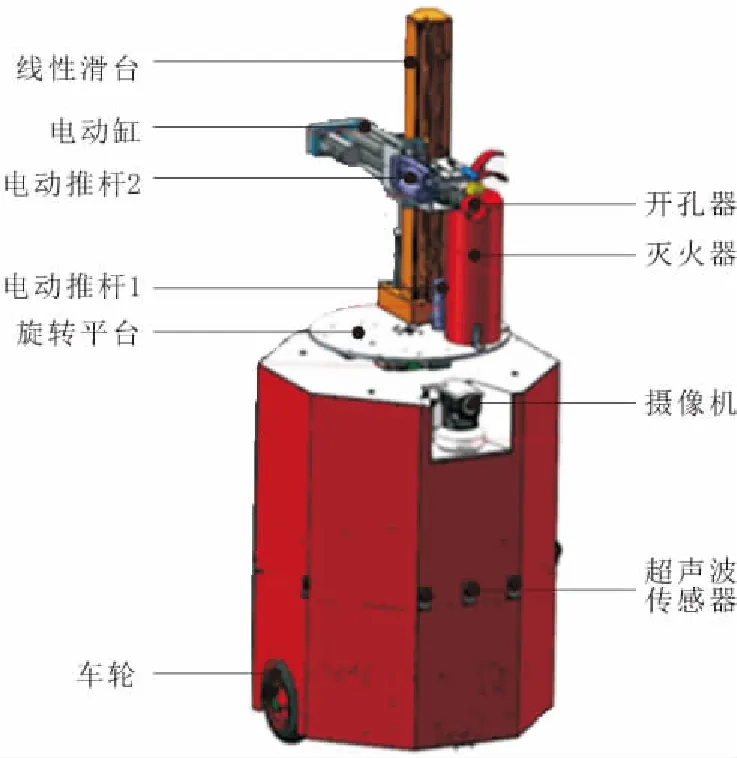
图3 机器人本体结构
移动车体可实现任意半径的转动,主要包括电机、减速机、驱动器、传感器和带有红外功能的高清摄像头等各种零部件,从而实现驱动、监测和避障等功能。
末端执行装置主要由中空旋转平台、三自由度机械臂、转盘、电动开孔器、电动推杆2、灭火器和摄像头等组成。中空旋转平台固定于转盘和车体之间,三者轴心位于同一条直线上,可带动转盘实现任意角度的旋转。三自由度机械臂由线性滑台和电动缸组成,线性滑台与转盘固定连接,两者垂直布置且轴心位于同一条直线上。电动缸通过连接板与线性滑台上的滑块固定连接,两者垂直布置,可随着线性滑台上的滑块沿线性导轨实现400 mm行程的自由移动。电动缸的丝杆端部安装有方形板,通电时丝杆可带动方形版沿着导轨实现150 mm行程的自由移动。电动开孔器和电动推杆2平行布置。电动推杆2的行程为100 mm,电动推杆上安装有连接支架,连接支架的分别与电动缸推杆、灭火器的喷管和开孔器连接,灭火器喷管和开孔器处于同一竖直平面内。
消防机器人进入高压配电室,基于摄像头传输回来的图像信息,操作人员控制车体到达火灾位置,调整车体角度,使电动缸与观察窗保持垂直,控制线性滑台上的滑块上下移动,使其距离地面的高度与观察窗中心距离地面的高度相同,控制电动缸沿着线性导轨移动,使电动开孔器的端部与观察窗接触,控制电动开孔器使其在观察窗上钻孔。钻孔结束后,控制电动缸,使电动开孔器退出到距离观察窗约30 mm的位置,控制线性滑台上的滑块向下移动,使喷管上的喷嘴与钻孔的轴线处于同一条直线上,控制电动推杆2,使其推杆带着喷管进入钻孔内,控制灭火器上的电动推杆1收缩,打开灭火器,使灭火器喷出干粉,从而进行灭火。灭火结束后,控制电动缸回到原来的位置。
3 消防机器人性能分析
在高压配电室消防机器人本体设计的基础上,对机器人的性能进行分析,包括狭窄区域通过性分析、稳定性分析和抗倾覆能力分析,为高压室消防机器人设计方案的制定、结构的设计提供技术和理论支持。
3.1 狭窄区域通过性分析
消防机器人工作环境(高压室)的平面布局如图4所示。
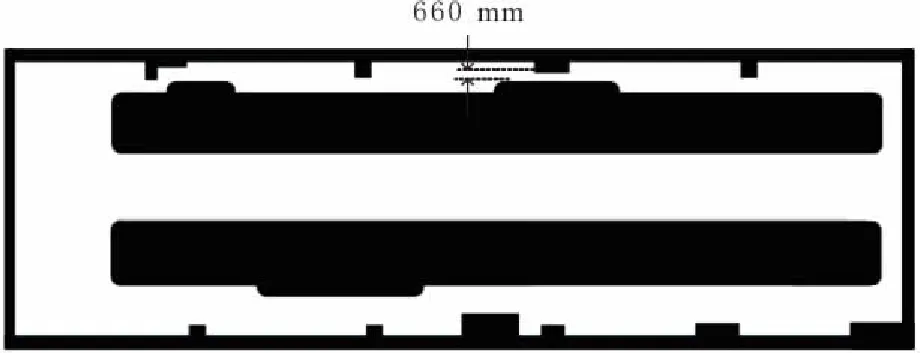
图4 高压消防室平面布局
由图4可知,黑色部分为高压室外壁和内部开关柜,视为移动消防机器人的障碍,白色空间为机器人的活动空间,白色区域最窄空间的宽度为660 mm。为了保证消防机器人能在高压室中顺利行进并完成破拆灭火工作,设计消防机器人车体的宽度为600 mm,使得消防机器人能在室内最狭窄区域顺利通过。
3.2 稳定性分析
由于安装在机械臂上的开孔器在对配电柜观察窗进行破拆钻孔时,会使消防机器人本体受到一个与钻孔方向相反的反作用力,这就需要对消防机器人本体做稳定性分析。当消防机器人移动到发生事故的配电柜位置,准备进行破拆灭火工作时,消防机器人车轮停放状态有2种情况,如下所述。
a.当消防机器人驱动轮的轴线与配电柜观察窗所在面垂直时,其主要受力情况如图5a所示(万向轮受力不考虑)。
设开孔器钻孔时,消防机器人本体受到的反作用力为T1,受力点距移动平台轴线距离为k,2个移动轮受到的阻力分别为F1和F2,移动平台的半径为r,则由力学分析知:
T1k=F2r+F1r
(1)
其中,F1=F2=F,则有T1·k=2F·r,进而有:
(2)
因为r/k>1,所以T1>2F。
b.当消防机器人驱动轮的轴线与配电柜观察窗所在面平行时,其主要受力情况如图5b所示(万向轮受力不考虑)。
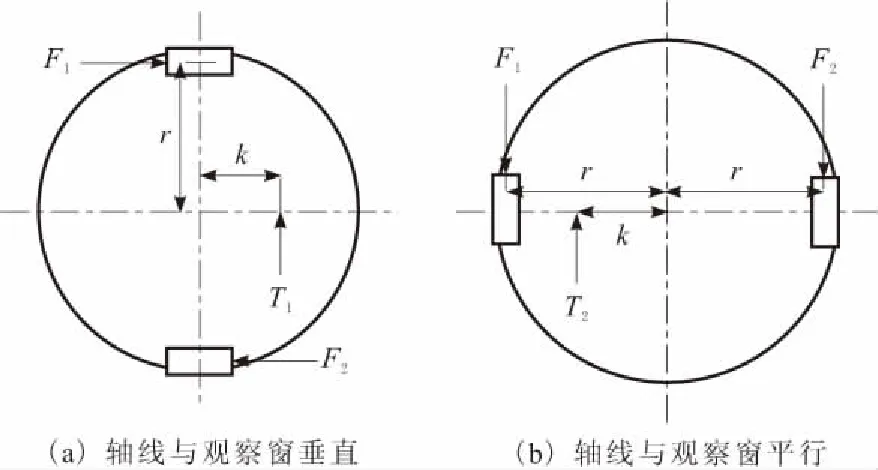
图5 车轮轴线与观察窗不同位置的受力分析
设开孔器钻孔时,消防机器人本体受到的反作用力为T2,受力点距移动平台轴线距离为k,2个驱动轮所受到的阻力分别为F1和F2,移动平台的半径为r,则由力学分析知:
F·2r=T2(k+r)
(3)
其中,F1=F2=F,则有:
(4)
故由a和b分析结果知,除消防机器人本体车轮停放状态外,在相同破拆观察窗条件下,在条件a时机器人本体停放的状态更加稳定。
根据实验情况,在k=0时,条件a和条件b都能满足要求。考虑到开孔器不能正常停止进给运动时,条件b的安全性更高,所以设计的开孔器轴线位置与移动平台轴线位置重合(即k=0)。
3.3 抗倾覆能力分析
为了保证消防机器人正常稳定工作,当开孔器在对配电柜观察窗进行破拆钻孔时,同时需要对消防机器人本体做抗倾覆能力分析。当消防机器人移动到发生事故的配电柜所在位置,准备进行破拆灭火工作时,消防机器人车轮停放状态也有相同的2种情况:
a.当消防机器人驱动轮(移动轮)的轴线与配电柜观察窗所在平面垂直时,其主要受力情况如图6a所示。
设开孔器钻孔时,消防机器人本体受到的反作用力为F1,受力点距地面高度为h,消防机器人本体受到的总重力为G,移动平台的半径为r,倾覆点为移动轮上的M点。则由力学分析知:若F1h F1h=72.5×1 206=87 435 N·mm Gr=500×300=150 000 N·mm 因为F1h b.当消防机器人驱动轮(移动轮)的轴线与配电柜观察窗所在面平行时,其主要受力情况如图6b所示。 图6 驱动轮轴线与观察窗受力分析 设开孔器钻孔时,消防机器人本体受到的反作用力为F2,受力点距地面高度为h,消防机器人本体受到的总重力为G,移动平台的半径为r,倾覆点为万向轮上的M点,则由力学分析知:若F2h F2h=72.5×1 206=87 435 N·mm Gr=500×300=150 000 N·mm 因为F2h 综上所述,在a和b情况下消防机器人本体均具有良好的抗倾覆能力性能。 通过上述计算分析可知,该消防机器人具有良好的狭窄区域通过性能、稳定性能,以及良好的抗倾覆性能。 消防机器人上位机可以通过局域网实现对机器人的远程操控,进行前进、后退、转弯、绕行、开孔和灭火等一系列操作。 操作人员通过上位机控制消防机器人的移动转向,使机器人移动动到距离配电柜观察窗合适的位置,然后控制机械臂通过开孔器对目标进行开孔实验。开孔实验如图7所示,实验表明消防机器人能够顺利开孔。 图7 开孔实验 操作人员通过上位机控制机械臂,使得灭火器喷管移动到开孔器的开孔处,通过电动缸推杆将喷管送入孔内,此时干粉灭火器打开进行灭火,完成后推杆收回,机械臂回零位,灭火动作完成。灭火实验如图8所示。 图8 喷射干粉 在机器人进行灭火的途中,遇到狭窄的空间不方便依靠摄像头图像信息操控机器人时,可切换为自助避障模式,使机器人能够顺利通过狭窄区域。自主避障实验如图9所示。 图9 自主避障实验 根据高压室消防机器人的作业需求,设计了一种用于高压配电室消防机器人系统,用于高压消防室的监测和消防作业。对消防机器人系统进行了组成分析和结构设计,详细介绍了机器人的结构组成。通过对消防机器人的狭窄区域通过能力、稳定性和抗倾覆能力分析,确认了所设计的消防机器人具有较好的性能。通过开孔实验、灭火实验和自主避障实验,验证了高压室消防机器人能够有效完成预定的作业任务。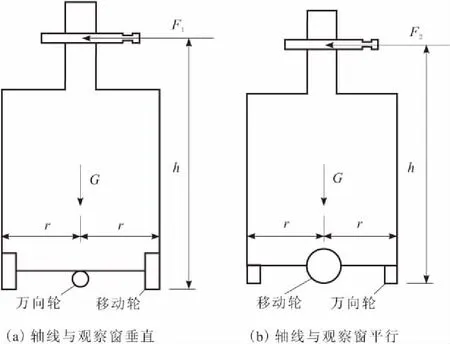
4 实验研究
4.1 开孔实验
4.2 灭火实验

4.3 自主避障实验

5 结束语