基于融合性检测法的车辆轮廓提取研究
2018-12-24王依兵刘光宇
王依兵,刘光宇
(杭州电子科技大学,浙江 杭州310018)
0 前言
当前交通指挥系统中,车辆信息自动识别技术已经得到有效应用,其不仅能够对车牌进行有效识别,还可甄别车型,从而保证目标车辆提取的精确度。常见的目标车辆提取算法有三类:其一为光流法;其二为帧间差分法;其三为背景消去法[1]。其中有关帧间差分法、背景差分法的研究最为突出。基于前人研究可知,尽管帧间差分法(包括三帧差分法)、背景消去法能够实现对目标车辆的提取,但在下述方面仍存在一定的缺陷:基于帧间差分法提取目标车辆操作难度较小,并且能够保证提取的实时性,但因不能对目标重叠部分进行有效检测,为此,“空洞”问题较为严重;而背景消去法在应对“空洞”问题上具有出色表现,但基于该方法提取目标车辆时,需要创建背景模型,并且极易受到环境因素的影响,诸如物体阴影等[2]。此外,该方法在提取实时性方面存在显著不足。针对该情况,结合相关人员研究,笔者针对基于背景消去法、三帧差分法的融合性检测法进行研究,探究融合性检测法在车辆轮廓提取中的表现。
1 融合性检测法原理
融合性车辆检测法是基于对背景消去法与三帧差分法进行融合而得到一种检测方法,基本逻辑如下:基于均值法从视频序列中提取背景图像,并实现对背景图像的更新,得到Bnew(x,y),提取前帧图像fk(x,y),将其与 Bnew(x,y)进行差分,便能得到背景消去法下的车辆M1(x,y);从视频序列中提取前一帧、当前帧以及下一帧图像,即fk-1(x,y)、fk(x,y)、fk+1(x,y),输入公式,促使邻帧图像实现两两差分,便能得到三帧差分法下的车辆M2(x,y).基于逻辑或促使M1(x,y)、M2(x,y)实现有效融合,便能得到融合性车辆检测法下的运动车辆,即 M(x,y).
2 融合性车辆检测法算法流程
2.1 目标车辆检测
基于融合性检测算法提取车辆轮廓对应的算法流程如图1所示,具体内容如下:
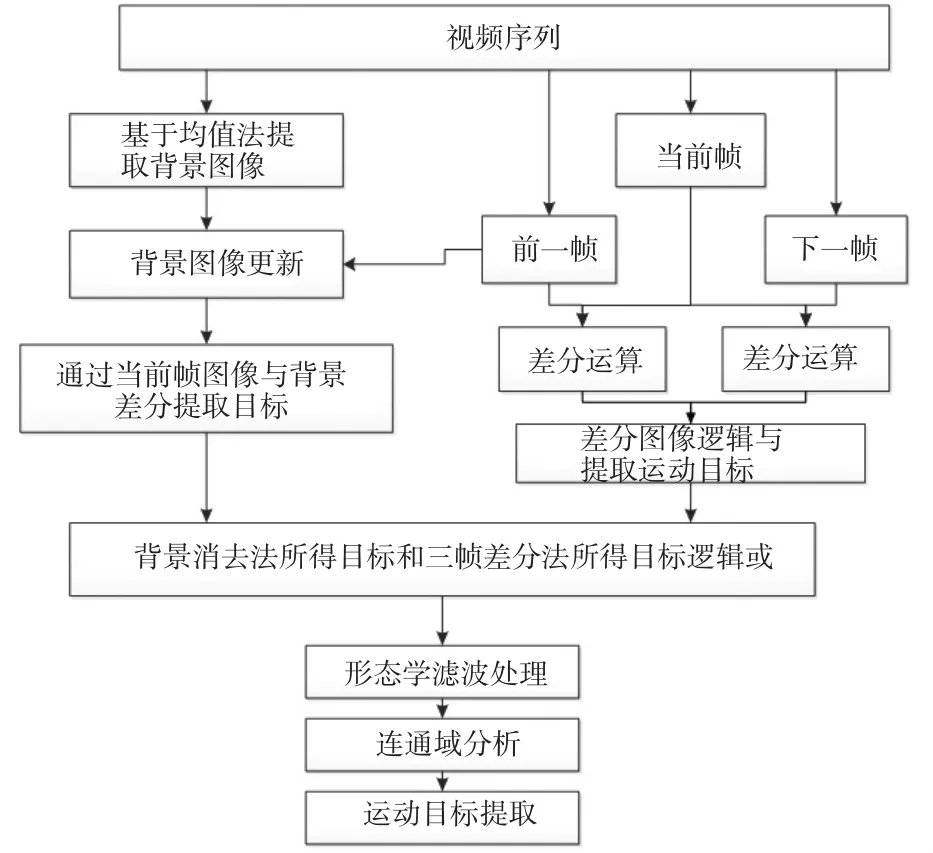
图1 融合性检测算法流程图
(1)创建背景图像
从视频序列中,选择前N帧图像,将其当作均值建模中的输入,借助均值法实现对车辆背景图像的确定,计算公式如下:

fk(x,y)即为当前帧图像,fk-1(x,y)表示的是前一帧图像,基于前一帧图像、背景图像进行求均,促使背景图像实现及时更新:

公式(2)中,α为更新速率。见图2.
图2 背景图像
(2)背景消去法检测
fk、Bk所表示的是k时刻对应的帧图像、背景图像,其对应的差分图像可以基于公式(3)予以表示:

基于差分图像进行二值化,便能得到二值化图像:

公式(4)中,T 为阈值,以实现对点(x,y)是否属于目标所属点的判断,当超过该阈值时,则说明该点属于前景点,反之则说明其属于背景点[3]。
背景更新公式如下:

公式(5)中,α为更新速率。
基于公式(3)、(4)、(5)促使fk(x,y)、Bnew(x,y)进行差分运算,便能得到背景消去法下的运动车辆,即M1(x,y),检测结果如图3所示。

图3 背景消去法所得车辆目标
(3)三帧差分法检测
从视频序列中提取前一帧、当前帧以及下一帧图像,即fk-1(x,y)、fk(x,y)、fk+1(x,y),输入公式(6),有:

促使邻帧图像实现两两差分,便能得到三帧差分法下的车辆,即M2(x,y),检测结果如图4所示:
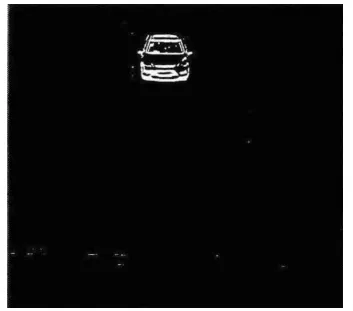
图4 三帧差分法所得运动目标
(4)融合性车辆检测
基于逻辑促使M1(x,y)、M2(x,y)实现有效融合,便能得到融合性检测法下目标车辆,即M(x,y),检测结果如图5所示:

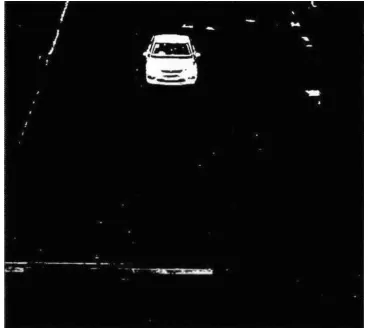
图5 融合检测法所得车辆目标
2.2 形态学滤波处理
基于融合检测法实现对目标车辆的提取后,对提取结果进行处理,以清除提取结果中的噪声,实现对提取结果的优化。
(1)腐蚀
针对腐蚀处理的基本原理进行分析,可以发现,其实际就是促使原图像原点对应的结构元素,即S,在平面内进行有效移动,当其移至某点,能够被纳入到车辆区域A内,此类点的组合对应的便是腐蚀结果[4]。

(2)膨胀
针对膨胀处理的基本原理进行分析,可以发现,其实际就是促使原图像原点对应的结构元素,即S,在平面内进行有效移动,当其移至某点,S和车辆区域A之间存在交集,此类点的组合对应的便是膨胀结果[5]。

(3)闭运算
针对图像实施闭运算,可以将图中位于车辆以外的较小噪声进行有效清除,并对目标间所存在的较小缝隙等进行有效处理,以优化图像[6]。就闭运算的处理顺序来看,一般是先进行膨胀处理,后进行腐蚀处理[7]。

2.3 连通域分析
针对目标内所涉及到的像素点数量进行计算,从而实现对车辆区域的判断,通常来说,车辆区域对应的像素点数量偏多,显著高于噪声区,就车辆区域予以确定[8]。同时,对非车辆区域进行有效去除。连通分析后所得目标如图6所示。

图6 基于形态学处理及连通域分析所得目标
2.4 车辆轮廓信息提取
基于上述步骤完成图像提取后,就图像中车辆位置予以确定,从而实现对车辆的提取,而后基于Canny边缘检测实现对车辆整体特征的提取,并针对车辆图像实施区域划分,基于Gabor变换对车辆的局部特征进行提取,借助灰关联分析,实现对局部特征的优化[9];创建双层串行识别框架,第一层主要是针对车辆的整体特征进行识别,第二层主要是针对车辆的局部特征进行识别,综合双层识别结果,以实现对车辆轮廓的提取,从而确定目标车辆的车型[10],车辆轮廓信息提取结果如图7所示。
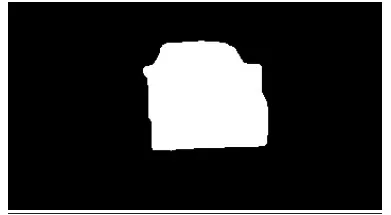
图7 车辆轮廓信息提取结果
3 实验结果与分析
3.1 实验环境
研究实验所用到的硬件设备包括:视频监控设备、计算机等。基于视频监控设备采集视频图像,并将视频文件存储为AVI格式。将视频文件加载至计算机,在Windows7系统下,借助VS2010+OpenCV2.4.2编写应用程序,开展仿真实验。实验所用计算机处理器为 i7-2600,内存为8 G,主频为3.4 GHz.
3.2 实验实施及结果分析
(1)检测结果比较分析
基于背景消去法、三帧差分法以及融合性检测法均能实现对运动车辆的有效检测,但就三种检测方法所得结果进行比较,如图8所示,可以发现,三种检测方面在结果存在较大的差异。针对图8(a)进行分析,可以发现基于背景消去法检测车辆,能够有效规避“空洞”问题,但由于在图像背景方面要求偏高,为此,检测结果中车辆边界完整性表现较差,部分边界存在缺失,此外,因环境因素作用,图像噪声较多;针对图8(b)进行分析,可以发现基于三帧差分法检测车辆,无需创建背景模型,并且环境因素对检测结果的影响相对偏小,图像中噪声偏少,但就“空洞”问题较为严重,不能保证车辆的完整性;针对图8(c)进行分析,可以发现基于对背景消去法、三帧差分法的融合对车辆进行检测,所得到检测效果较好,车辆完整性表现出色,此外,通过形态学滤波处理、连通域分析以及Canny边缘检测等,能够实现对噪声有效清除,“空洞”问题得到有效解决,能够实现对车辆的精准检测。
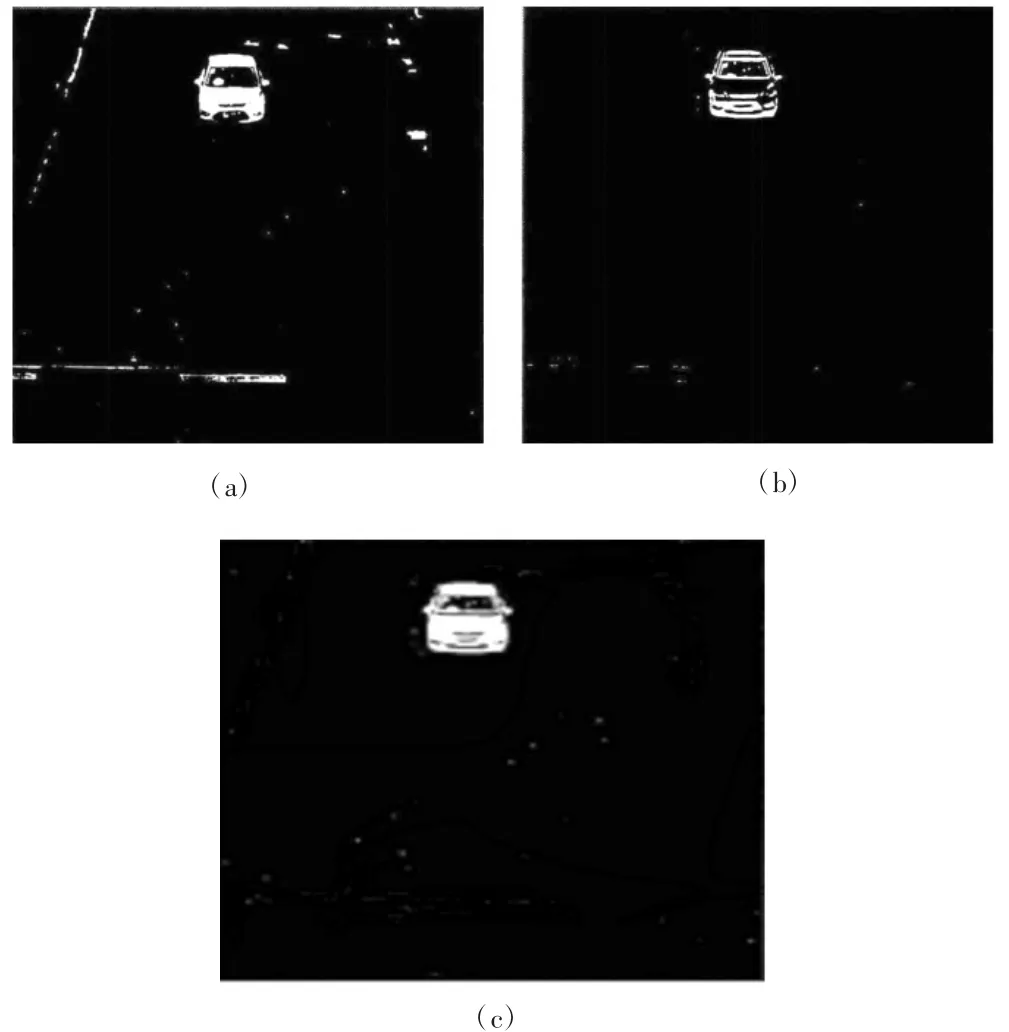
图8 基于三种方法所得检测结果
(2)轮廓提取效果分析
基于实验视频监控设备采集图像共2000帧,借助计算机对图像进行处理处理,创建全新背景图像,并确定背景图像更新规则,基于融合性检测法提取车辆,并对车辆图像进行形态学滤波处理、连通域分析,而后提取车辆轮廓信息,提取效果如图9所示。
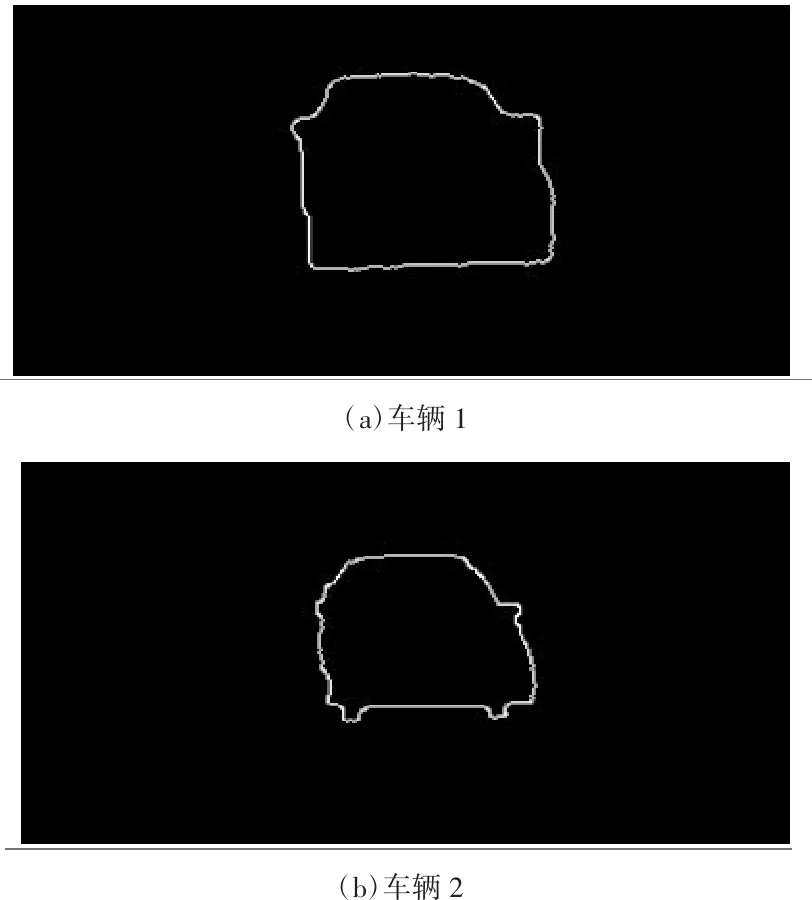
图9 车辆提取实验结果
针对图9进行分析,可知基于研究提取算法所得目标车辆轮廓较为完整,这充分证明了该提取算法的有效性,能够高效识别车型。
通过此次研究可以发现,基于背景消去法、三帧差分法的融合检测法能够实现对车辆轮廓的完整提取,并且有效规避了“空洞”问题,有效减少了噪声,所得提取结果较为理想。但特征选择、识别模型创建等方面仍有一定难度,在后续研究中,笔者将从这两方面进行深入探究,攻坚克难。