一种新型磁链滑模观测器的IPMSM无位置传感器最大转矩控制
2018-12-24张健
张 健
(江苏安全技术职业学院 电气工程系,江苏 徐州221011)
0 引言
为了实现对内置式永磁电机(inter-ior permanent magnet synchronous motor,IPMSM)的有效控制,通常安装位置传感器对电机运行过程的位置信号进行采集和反馈,从而完成对电机转速、位置以及电磁推力的精确控制[1]。但位置传感器比较容易受高温、震动和装配精度等诸多因素的影响,使得控制系统的稳定性下降,增加电机控制系统的设计成本[2-3]。为了提高系统的可靠性、降低生产成本,近年来,IPMSM的无位置传感器的控制已经成为当今研究的热点[4]。许多科研人员也提出了诸多无位置传感器的估算方法,其中主要有反电动势积分法[5]、反电动势观测法[6]、自适应算法以及高频注入算法等[7],都有一定的应用效果。
本文提出了一种基于磁链滑模观测器的IPMSM无位置传感器控制方法,为了实现内置式永磁同步电机最大转矩电流比的控制,在新建的坐标系上借助相位角分析,完成了新定义磁链的控制方程和磁链滑模观测器的设计。最后,在MATLAB/Simulink上对该无位置传感器控制算法进行仿真验证。实验结果表明:与传统的磁链观测器相比,该磁链滑模控制器可以非常近似地估计最大转矩(MTC),其同样适用于MTPA的电流矢量控制。
1 新磁链模型的建立
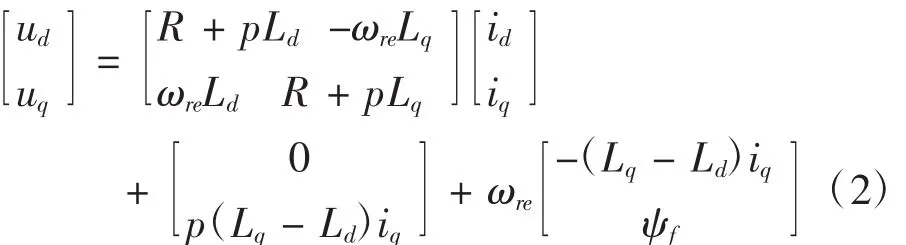
电机模型的构建通常比较复杂,在d-q轴的旋转坐标系下,可得IPMSM的定子电压和磁链数学模型如下:

其中pψf=0.R是绕组电阻,Ld是d轴电感,Lq是q轴电感,ωre是转子电角速度,ωf是定子绕组中d轴绕组永磁铁产生的磁链,p是微分算子。
为了有效控制IPMSM,本文对传统磁链模型进行改进,使其在无位置传感器基础不需Ld,提高磁路饱和无位置传感器的鲁棒性,将所有轴电感全部为Ld得下式:
将磁链定义表达式(3)为:

将表达式(3)代入表达式(2)可得:

将表达式(4)变换成两相静止坐标系可得:

λα以及λβ的两相静止坐标系的物理量都是将(3)式变成(6)式:
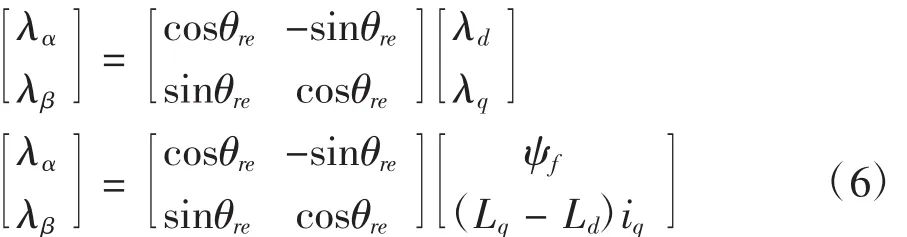
图1(a)表示IPMSM的一般物理模型。若考虑Lq部分是转子一侧时,可得图1(b).磁链λ在d轴方向上由电机产生的定子绕组中的d绕组永磁铁产生的磁链 ψf,在 q轴上由(Lq-Ld)iq产生的磁链与表达式(3)的定义的λ一致。但表达式(3)中的磁链λ不一定指向d轴,对于λ的相位将在下文阐述。结合表达式(4)和图 1(b)定子侧的绕组电感(d,q轴电感)可以被认为Ld.所以,此物理模型可近似看作表面式永磁同步电机进行研究处理[8]。
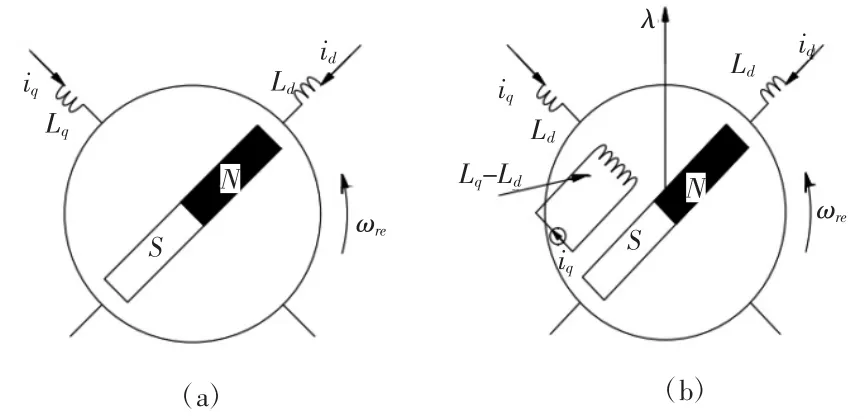
图1 IPMSM的物理模型
对磁链λ与它正交的轴进行定义为γ-δ轴,iMTPA表示 MTPA 控制电流。如图 2 所示。θγ,θi,Δθi表示 d轴与γ轴的相位差、q轴与iMTPA的相位差、θγ与θi的相位差。从图中可以看出α-β轴、γ-δ轴上的iMTPA的相位差关系,θ表示α轴与γ轴的相位差。磁链模型定义图如图2所示。
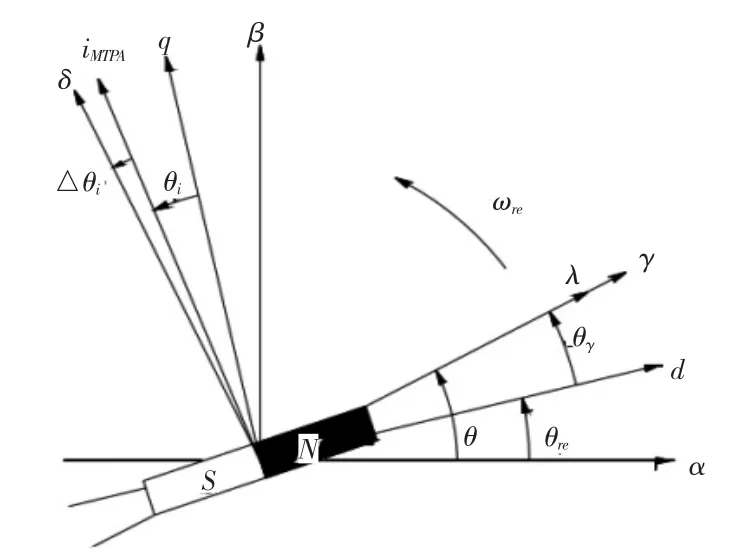
图2 磁链模型定义图

由表达式(3)和表达式(7)可得:

最大转矩电流比控制中θi的表示如下:

如果θγ=θi,则通过估计提出的磁链最大转矩轴成为可能。图3中特性。由图3中可看出,相位差Δθi随凸极比或负荷增大而增大。当位差 Δθi的相位差约 50°.
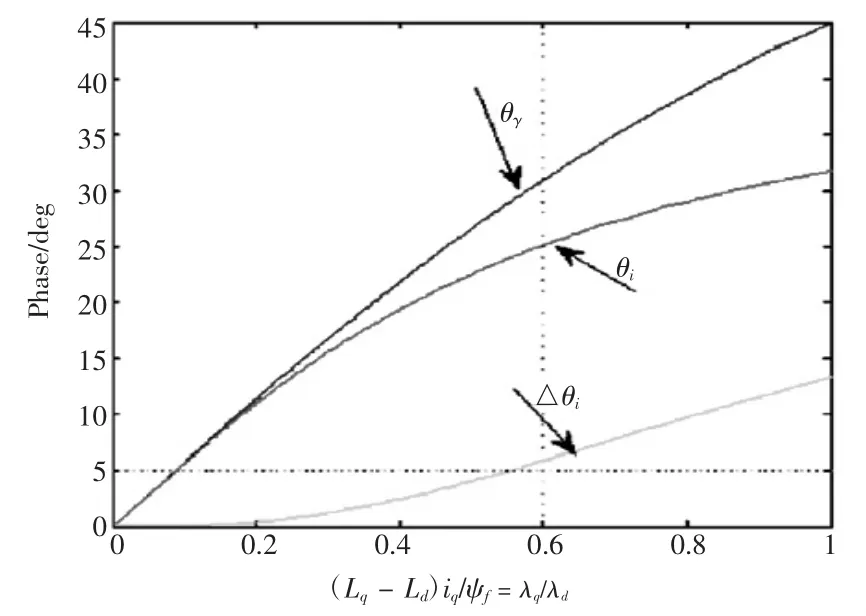
图3 (Lq-Ld)iq/ψf与相位的关系图
2 最大转矩控制轴的高精度估计方法

由表达式(8)和(9)可知,θr和 θi可以通过磁链λd、λq求得,进而求解出 Δθi.表达式(3)定义了 λd=ψf,λq可以通过下列表达式求解出:
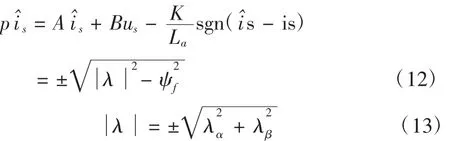
所以利用 ψf估计 λd,将其代入表达式(12)可得λq,接着将 λd、λq代入表达式(8)和(10)即可求出 Δθi.在求解的过程中由于没有使用Lq即可求解最大转矩控制轴上的相位θ-Δθi,可见磁路饱和现象与否对此影响大大减少,可实现高精度的最大转矩控制轴的估计。
3 磁链模型的滑模观测器的设计
根据构建的IPMSM磁链模型可知,该磁链模型可近似看成SPMSM进行研究,即:

由上文设计的新磁链所在轴是γ轴,其在α-β轴上的投影用λα和λβ分别进行表示:

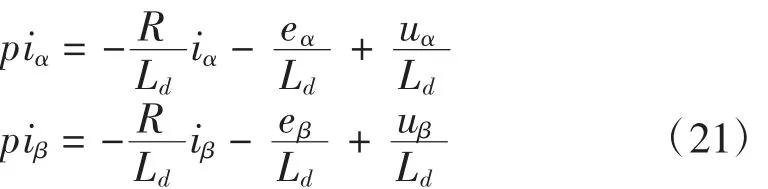
继续对磁链λα和λβ进行求导,忽略pλ ,可得:

式中,uα和uβ表示定子电压分别在α轴和β轴的分量,iα、iβ表示 α-β坐标系的 α 轴和 β 轴的电流,ω和θ分别代表电机γ轴、α轴之间的转速和相位角,λ 表示定义磁链的模值。假设需要的扩展反电动势为:

对表达式(14)进行转换为:
上述表达式的数学模型表示为:
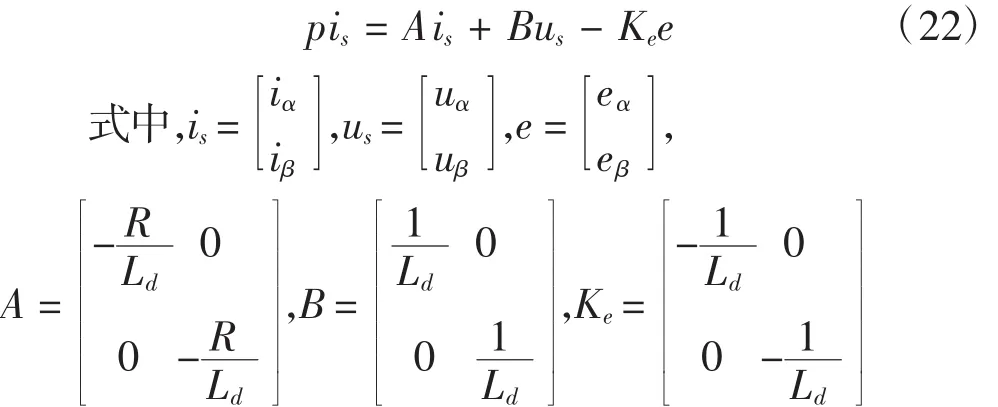
传统磁链观测器模型表示为:

式中,i^表示电动机定子电流的估计值;K为磁链观测器的开关增益;sgn(x)表示符号函数。
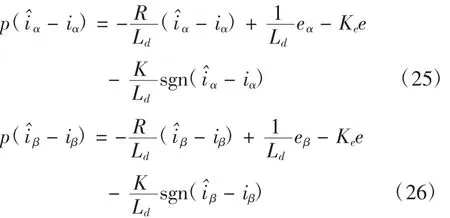
由表达式(22)和(23)相减可得:

磁链e决定了表示(24)的误差动态特性,所以磁链观测器状态表达式可为:
利用Lyapunov方法证明上式电流误差的稳定性,满足磁链观测器的稳定性,定义函数为:
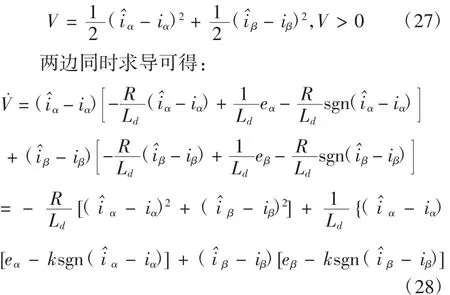
其中,V = sgn(i^α-iα)> 0,sgn(i^β-iβ)> 0 时,eα-k < 0,eβ-k < 0 那么V˙< 0.
V=sgn(i^α-iα)< 0,sgn(i^β-iβ)< 0 时,ea-k > 0,eβ-k > 0那么V˙< 0
则磁链观测器达到稳定时的条件为:

由观测器滑膜的存在性和可达性条件可得滑膜切换面如下:

函数切换控制:

系统滑模状态方程表达式如下:

由滑模变结构原理可得如果满足,s(x)=0,s˙(x)=0那么系统趋近于滑动模态。
对滑模切换面进行求导后,将表达式(32)代入可得:
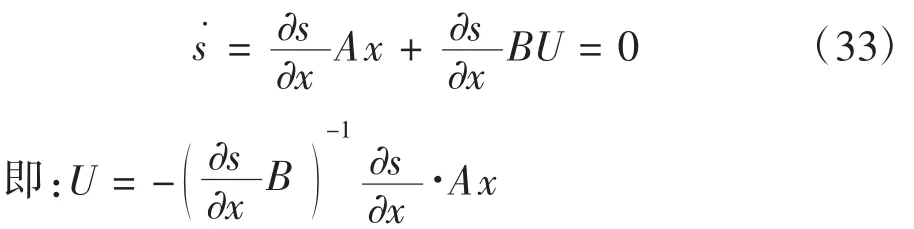
对上述表达式进行转换可得等效控制量:

滑模控制开关的特性定义如下:

式中,Zα、Zβ表示误差电流开关的信号;Δ(t)表示系统受到的外界干扰信号。
因为开关信号中含有磁链信息,本文通过使用低通滤波器对开关信号中的高次谐波进行滤波。
式中,ωc表示低通滤波器的截止频率。
相位角及转速运算后并引入转角补偿可得:
综上,完成了对新磁链观测器的设计。
4 仿真与实验研究
4.1 仿真研究
为了验证上述控制策略的正确性,本文使用Matlab/Simulink对所提方案进行了仿真。仿真过程中设定电机的参数如表1所示。在id=0的控制下,转速电流双闭环输入设定转速为1 100 rad/s,ω
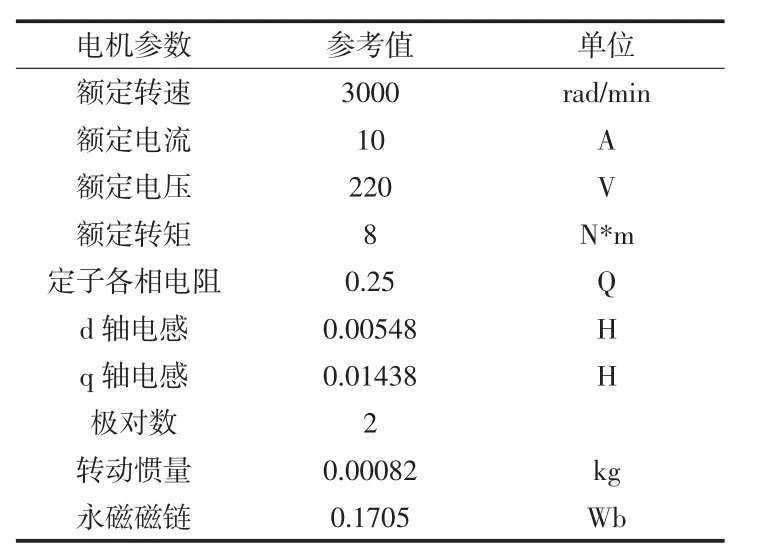
表1 电机参数的设置
由图4可知,当t=0.12 s时加7 N·m的负载转矩,永磁同步电动机三相电流经很短的时间后回到标准、稳定的正弦波。
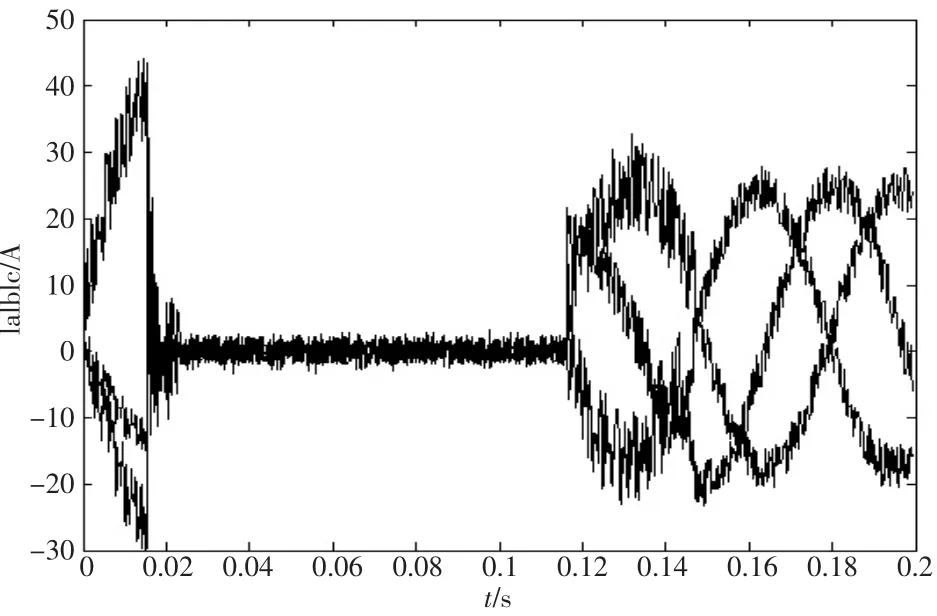
图4 ABC三相电流仿真结果图
由图5可知,电动机启动阶段,由PI进行调节,转速迅速上升经过极短的时间振荡后,稳定在转期望速值1 100 r/min.当t=0.12 s时加7N·m的负载转矩扰动后,转速经短暂的振荡后仍能回到给定值1 100 r/min.
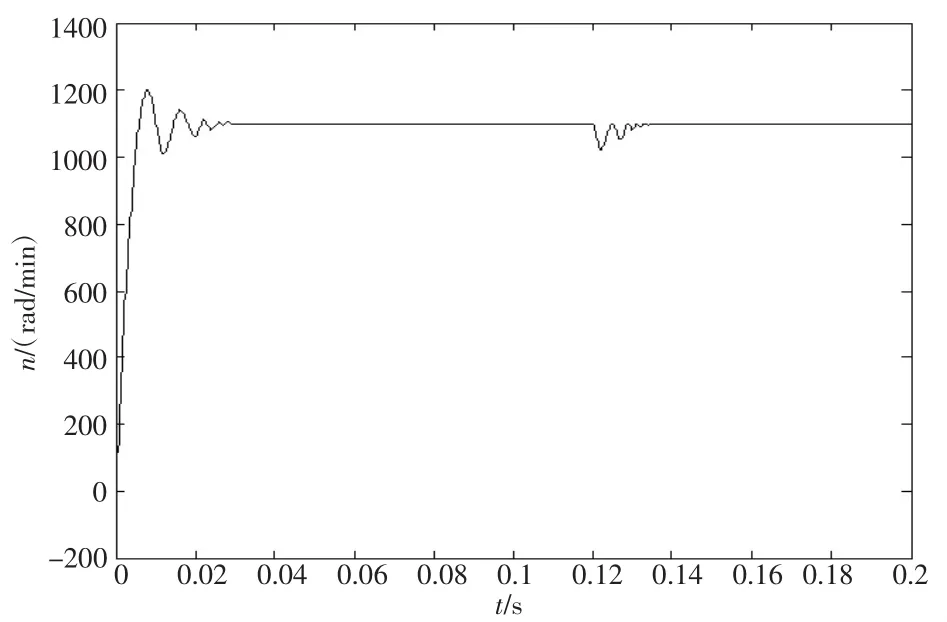
图5 转速仿真结果图
由图6和图7可知,当t=0.12 s时加7 N·m的负载转矩后,转速经短暂的振荡后,转矩和相位角并没有受到影响,动态性能良好。实现了良好的无位置传感器控制,大大提高了系统的抗干扰性和鲁棒性。
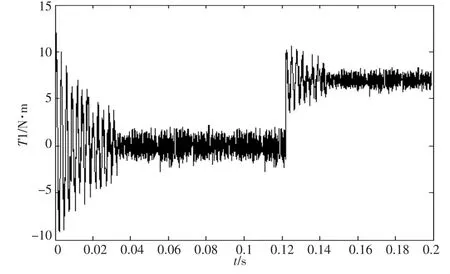
图6 电机负载转矩仿真结果图
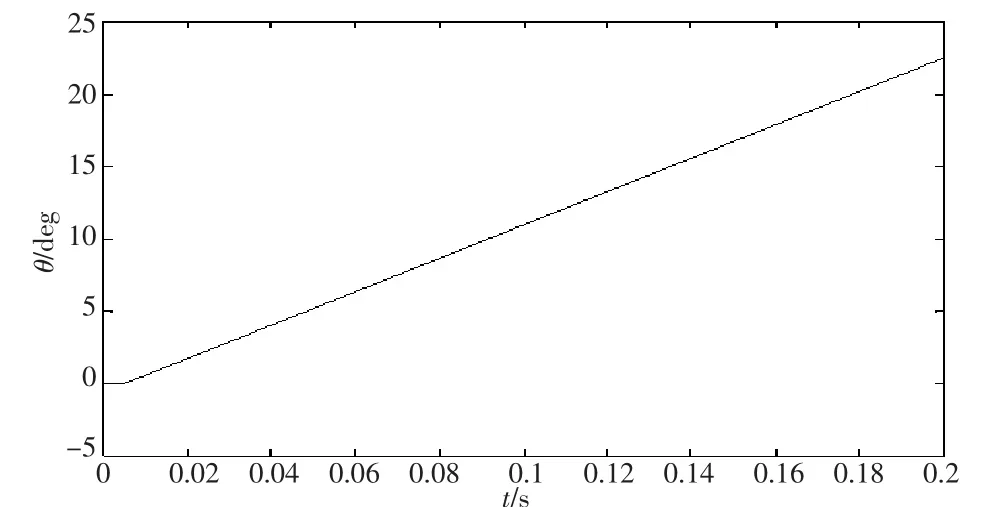
图7 电机相位角仿真结果图
4.2 实验研究
为了验证磁链滑模观测器的性能,处理器选用TI公司研发的TMS320F28335,同时,搭建了IPMSM无位置传感器控制的实验平台。实验过程中使用的电机参数与仿真设定的参数一致。
(1)鲁棒性实验研究
为了研究本文设计的磁链滑模观测器可以提高系统的鲁棒性,在电机转速为600 r/min、负载稳定运行时,将磁链滑模观测中q轴的电感值迅速调至额定值的±50%,实验波形变化如图8所示。电感分别在t0和t1时刻发生突减、突增的变化,但是对实验结果进行分析可得:磁链幅值和电磁转矩在电感发生阶跃的前后几乎未发生改变,即表明本文设计的磁链滑模观测器在电机电感参数发生变化的情况下,具有较强的鲁棒抑制能力。
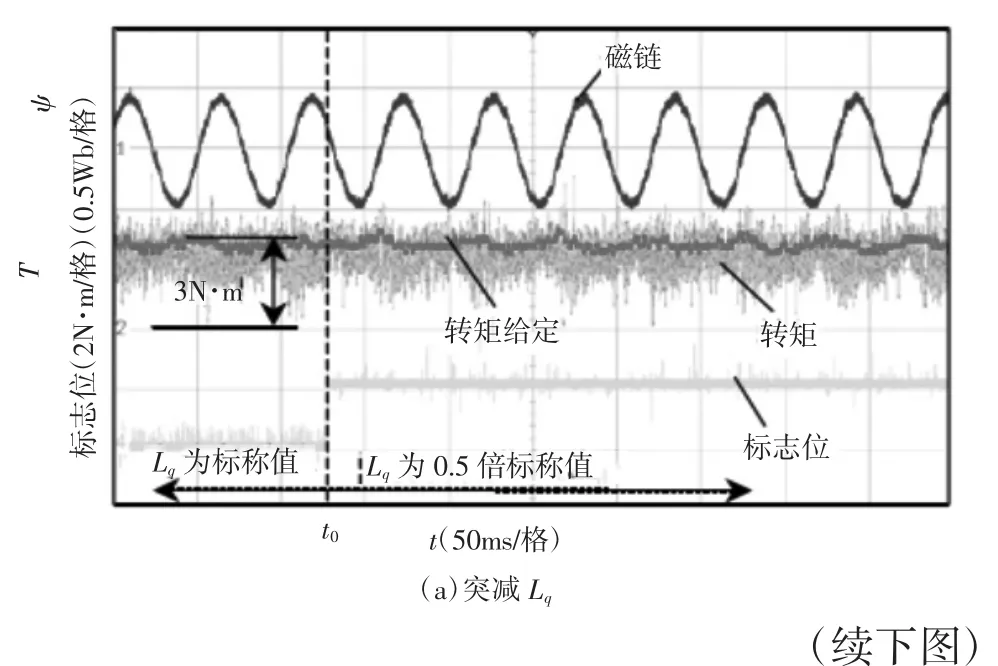
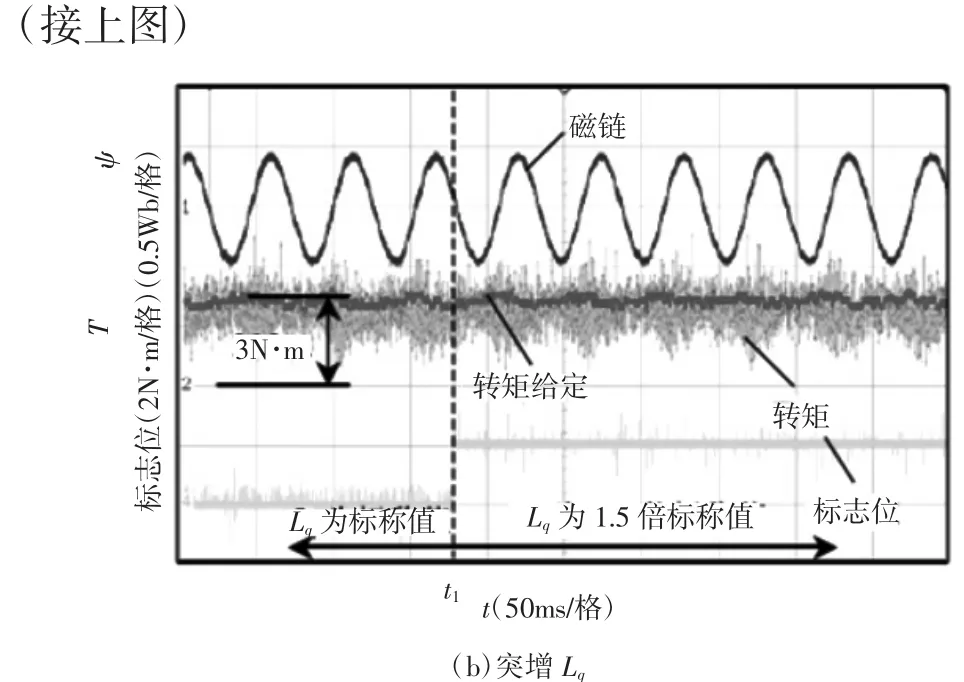
图8 q轴电感突变实验
(2)动态性能实验研究
为了验证采用本文磁链滑模观测器后系统的动态性能,在电机转速为600 r/min、稳定运行时,负载发生改变下的动态试验。试验波形如图7所示。在电机空载时,将转速迅速从30 r/min提升至600 r/min的动态实验波形如图8所示。从图9和图10的实验结果分析可得:本文设计的磁链滑模观测器对电机负载和转速突变的情况下,具有较好的动态收敛性。

图9 负载阶跃实验
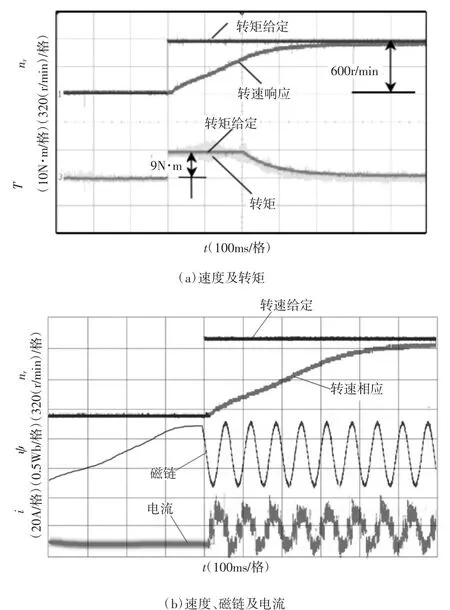
图10 速度阶跃实验
(3)稳态性能实验研究
为了验证采用本文磁链滑模观测器后系统的稳态性能,在电机低速负载的情况下进行稳态实验研究,实验结果如图11所示。从实验结果分析可以得到:在低速负载的情况下,系统依旧运行稳定。图中转矩发生脉动主要是由电机的电感比较小和反电动势不是正弦造成的。而图中波形上形成的尖峰主要是受开关干扰耦合的影响。
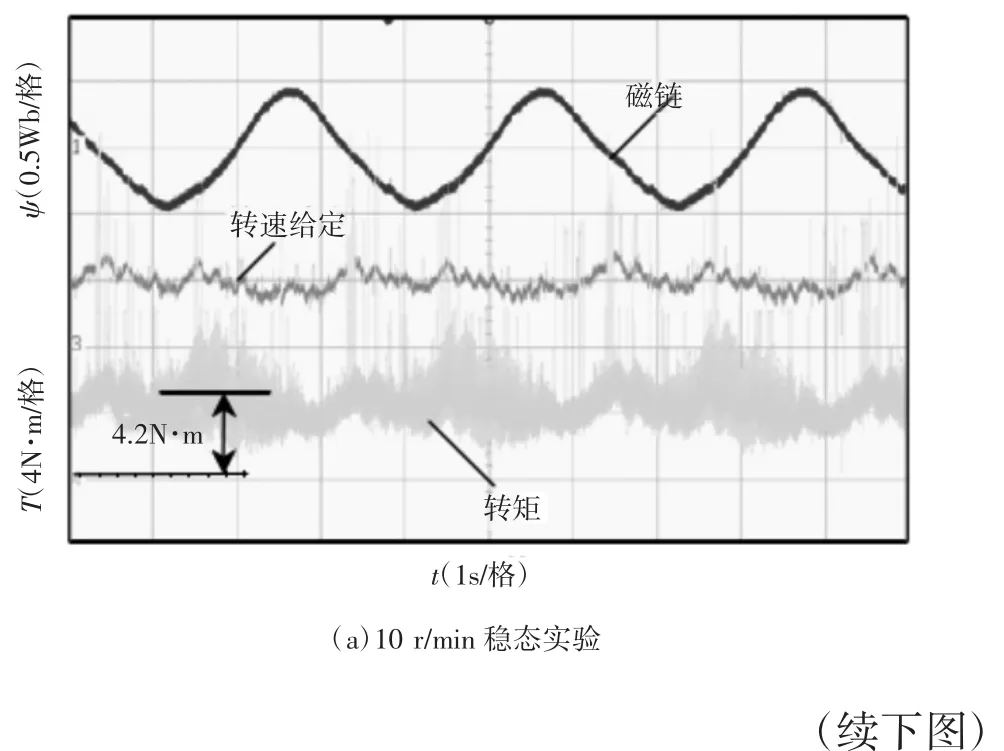
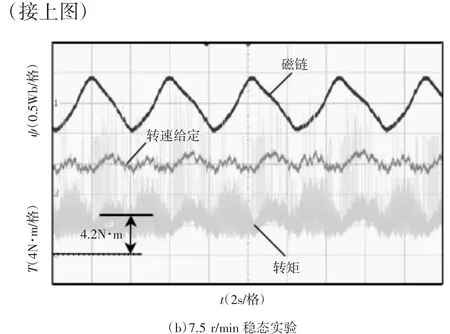
图11 低速负载稳态实验
5 结论
本文提出了一种新型磁链滑模观测器的IPMSM无位置传感器最大转矩控制法,通过在新建的坐标系上借助相位角分析,完成了新磁链控制方程的定义和磁链滑模观测器设计,实现最大转矩控制轴的磁链高精度估计。为了验证所设计的磁链滑模观测器的性能,分别在理论扰动和实际扰动下进行了仿真与实验,结果表明:所设计的磁链滑模观测器结构简单、电机参数依赖少、观测精度高,对电机电感的变化具有较强的鲁棒抑制能力,具有较好的应用价值和前景。