机械结构形态提取方法
2018-12-19徐赐军黄松林王向杰
徐赐军,黄松林,王向杰
(湖北理工学院 机电工程学院,湖北 黄石 435003)
0 引言
目前,三维计算机辅助设计(Computer Aided Design, CAD)正逐步应用到诸多工程领域中,但随着三维CAD模型在数量及复杂性上的迅速增加,三维CAD模型复用与检索问题日益突出[1]。CAD模型检索正是为从规模日益增大的模型数据库中快速获取符合特定描述(如几何形状、加工特征、拓扑结构等)的相似模型,进而实现模型重用而提出的。CAD模型检索可划分为两个层次,即基于视觉相似性的三维CAD模型检索[2-3]及面向语义与功能描述的三维CAD模型检索[4]。虽然三维CAD模型检索取得了一定的研究成果,但三维CAD模型不同于通用领域的三维模型,如何根据其特点及检索需求,提供更符合CAD领域及用户需求的检索算法;面对企业庞大的模型库,如何更高效、更精确地检索三维CAD模型,改善和提高检索效率,都是今后值得研究的问题[5]。目前研究的三维模型检索算法在实现过程中都需要重新对模型库中的模型进行二维轮廓、拓扑结构、特征属性等分析计算,大大降低了检索效率。因此,本文研究的重点是在三维CAD模型库中建立相应的简化模型,实现三维模型的粗检索,然后根据设计者需求进行必要的精检索。
三维CAD模型的简化在计算机辅助设计、图形学等领域得到了广泛研究,但越来越复杂的CAD模型在实际处理中的难度越来越大,远远超出一般图形硬件的实时处理能力[6]。目前,三维CAD模型的简化方法主要分为基于多边形、基于边界表达和基于特征的简化方法[7-8],而CAD模型骨架特征描述是结构特征简化的有效途径。Li等[9]利用几何边界的曲率、挠率和视点相关信息提取边界特征线,并基于凸边界及方向包围盒法提取三维模型的骨架;Sun等[10]通过离散单元的3维模型矢量场的计算及其临界曲线和临界点的拓扑特性分析,提出3维模型层次渐进的线形骨架提取方法;Sundar等[11]使用距离变换方法得到三维模型的骨架图表示,最终的模型检索则在骨架图基础上通过图同构算法实现;Ju等[12]根据栅格表示的三维模型去除一些体素,提出基于细化的三维模型检索方法;Iyer等[13]将B-Reps表示的CAD模型转换为体素表示,使用细化方法将体素模型转换为细化骨架;何志莹等[14]采用表面光滑收缩和骨架吸引的双重作用方法对模型进行迭代收缩,从而形成若干中心点,并依次连接各中心点形成模型的骨架;王广垒等[15]利用数学形态学方法提取出特征曲线带的骨架,并将提取的特征曲线用于鞋楦模型的重建;朱文博等[16]采用电场法提取机械零件的三维模型骨架,并将其转为成特征曲线,实现了基于骨架的机械零件三维模型检索。上述骨架提取方法对原始模型的信息要求比较严格,譬如模型需要是封闭的多边形网格或体素描述,松散多边形组成的模型提取骨架是没有意义的。另外,机械结构CAD模型可由若干基本体构成,基本体具有确定的解析几何表达式,而且在机械结构功能设计阶段主要考虑的是关键基本体结构,无需全面体现细节部分的结构骨架。因此,骨架对于机械结构简化所需的信息仍然过于复杂。为了提高三维模型的检索效率,本文针对机械结构三维CAD模型的特征简化提出机械结构形态的提取方法,为三维CAD模型的粗检索提供了理论基础。
1 机械结构形态提取框架
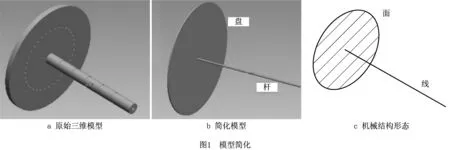
机械形态是用简单的点、线、面抽象描述机械的结构、功能、拓扑关系,并致力于研究机械结构、机械原理等的朴素表示方法,反映了设计者的抽象设计思维,塑造了机械设计结构、原理等的基本特征形态。机械形态包括机械结构形态、机械原理形态及机械知识形态。机械结构形态是以线、面抽象地描述机械结构的形状、功能及拓扑关系的表现形式,是机械原理形态和机械知识形态的研究基础,如图1c所示。文献[17]通过模型简化方法将图1a简化为图1b所示的圆板和杆,而本文的机械结构形态是进一步将原图简化为图1c所示的平面和直线。
机械结构形态主要结合模型的中轴、中性面,以及机械结构基本体的已知解析几何表达式抽象出来的线、面表达方式,来反映机械结构的形状、拓扑关系等信息。机械结构形态也是机械结构特征简化的方法,主要体现结构的功能设计,反映结构基本体的空间几何关系,并与原始结构保持相同的拓扑关系,减少了原始结构图的冗余信息。
Kulkarni等[18]虽然采用基于特征的简化算法提取了CAD模型的中性面,但其方法主要利用模型的边等特征信息。机械结构形态所涉及的中性面或中轴主要利用基本体已知的解析几何表达式及其中性面或中轴的理论求解方法直接获取,该方法为基本体转换模型的基面、导线和轮廓约束线的获取提供了理论依据。基本体转换模型是采用转换或拟合的方法将基本体的各种建模方式统一成扫掠方式的表达模型。基于基本体转换模型的机械结构形态提取方法框架如图2所示。

基本体知识库模块主要通过基本体转换模型将基本体属性知识库转换成基本体形态知识库。基本体属性知识库包括基本体的类型、几何信息、位置信息、拓扑信息等,基本体形态知识库包括导线、基面、轮廓约束线等。该模块的重点是构建一个模型,将基本体的属性知识直接转换为形态知识,为机械结构的形态提取提供基础知识支持。
基本规则模块是机械结构形态提取的另一关键技术,包括基面选择规则、基本体提取规则、基本体形态融合规则。基面选择规则根据机械结构中各基本体的属性和基本体间的拓扑关系确定基本体在转化模型中具体的导线、基面和轮廓约束线;基本体形态提取规则根据机械结构中各基本体的属性确定基本体的形态结构;基本体形态融合规则根据机械结构中各基本体的拓扑关系及其形态结构,确定基本体形态之间的有机融合,构成完整的机械结构形态。
基本体形态融合模块根据机械结构三维模型的分解提取所有基本体及其组合关系,然后根据基本体形态提取规则获取每个基本体的形态,并由基本体组合关系选择相应的基本体形态融合规则对所有基本体形态进行融合,从而提取完整的机械结构形态。
2 基本体转换模型
由图1可知,机械结构由若干基本体组成,其相应的机械结构形态也由若干基本体形态组合而成。基本体包括棱柱体、棱锥体、圆柱体、圆锥体、圆球体、圆环体、椭球体和扫掠体等。根据眼动理论可知,人类在知觉几何图形时,眼睛总在沿着图形的轮廓或线条作有规律的扫描运动。基于扫描的建模技术已经在计算机辅助设计领域得到广泛研究,但有许多研究是以图片为研究对象[19]。文献[20]采用二维轮廓变换生成基面,并通过三维扫掠进行模型构建,但该文献研究的三维扫掠方法无法表达各种基本体的模型。因此,本文综合各基本体的构造特征,将其统一为扫掠体的表示方法,即在一定时间段内,扫掠基面G在其形心沿导线C运动过程中所占用的几何空间,且运动过程中满足以下条件:①保持基面与导线当前时刻切线L之间的几何位置关系不变;②基面外形轮廓按当前时刻和初始时刻轮廓约束线R与导线的距离比值进行缩放。根据基本体特征,本文将扫掠基面定为平面,平面轮廓为基本体某个截面的投影,导线属于基本体的内部点集。轮廓约束线为基面上一边界点在基面沿导线运动时形成的轨迹线。若将扫掠时间段标准化为[0,1],用G表示扫掠基面的点集,各点采用齐次坐标表示,则扫掠体可采用Gt的无穷集合表示为
(1)
式中:Gt=GT,G为扫掠基面最大时所包含的点集,T为三维变换矩阵,且T=T1T2T3T4。T1表示基面G在开始时刻位置C0处平移到坐标原点的变换矩阵;T2表示基面G相对坐标原点的等比例缩放变换矩阵,其中比例因子由轮廓约束线R确定;T3表示上一步变换后的基面旋转到Gt平行位置的旋转变换矩阵,即保持Gt与导线在t时刻的切线Lt位置关系不变;T4表示上一步变换后的基面平移到t时刻位置Ct处的变换矩阵。
教授看着去解救杰克的萌萌和马丁的背影继续说:“当时另外两个孩子眼看就要跑上来了,所以我根本就没有机会再把那本书取出来。没想到一本书居然能让他们从君士坦丁堡凯旋门跟到这里,或许是天意吧,做坏事总要受到惩罚的。”
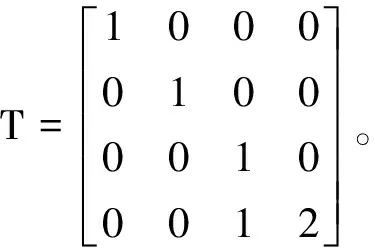
根据式(1)的定义,基本体转换模型能够实现柱体、锥体等基本体的转换,但实际结构中也可能涉及特殊的形体。因为机械结构形态是对机械结构的抽象表达,往往忽略结构细节,所以在结构表达模型转换过程中运用已知的基本体对特殊形体的基本体进行拟合。本文主要针对规则基本体进行研究,如图3所示的圆锥体。根据式(1)的定义,该圆锥体的基面为底面A,导线为直线ab,轮廓约束线为母线ad。设坐标系的原点在图3的底面中心b点,Z轴与直线ba重合,圆面B在导线中点处,即t=0.5。因此,由基面A到圆面B变换的齐次坐标变换矩阵为

3 机械结构形态提取基本规则
机械结构形态是对机械结构特征的简化,主要由机械结构基本体形态融合而成,在几何特征上与结构骨架有相似之处。机械结构基本体形态的具体描述均与基本体的形状特征相关,首先根据基本体结构及其各面连接属性确定基面和导线,然后针对特征确定的基本体,根据基面和导线的尺寸关系对基本体形态进行判断。
3.1 基本体基面选择规则
根据本文对基本体扫掠规则的约定,由基本体的特征可知,基本体分为单一基面基本体和多基面基本体。单一基面基本体指仅能由一个方向的基面扫掠而成的基本体,如圆锥、圆柱、六棱柱等;多基面基本体指可由多个方向基面沿不同导线扫掠而成的基本体,如三棱锥、球等。单一基面基本体的基面可由基本体特征直接确定,多基面基本体需结合不同形状的基面和扫掠过程中的变化规律确定形态简化所需的基面。
(1)单面基本体
常见的单面基本体有圆球、椭球、环等。根据本文扫掠体的形成条件,环属于单一基面基本体,圆球、椭球属于多基面基本体。若椭球不是旋转椭球,则该椭球关于坐标平面对称,根据其特殊性可以选择该类椭球的基面为包含长轴和中轴的主椭圆。由于圆球和旋转椭球为回转体,该类基本体具有无数基面。本文以该类基本体与其他基本体的连接属性为依据,选择用于基本体结构形态简化的基面,规则如表1所示。
(2)变尺度多面体
根据棱锥特征可知其侧面为三角形,若该棱锥存在多基面,则必须有一个基面为三角形平面,设为如图4所示的三角形A2A3B。三角形A2A3B在沿导线运动过程中,顶点B的轮廓约束线为直线,顶点A2,A3在底面运动。若导线为曲线,则三角形A2A3B的边一定会形成曲面,显然不符合棱锥特征。
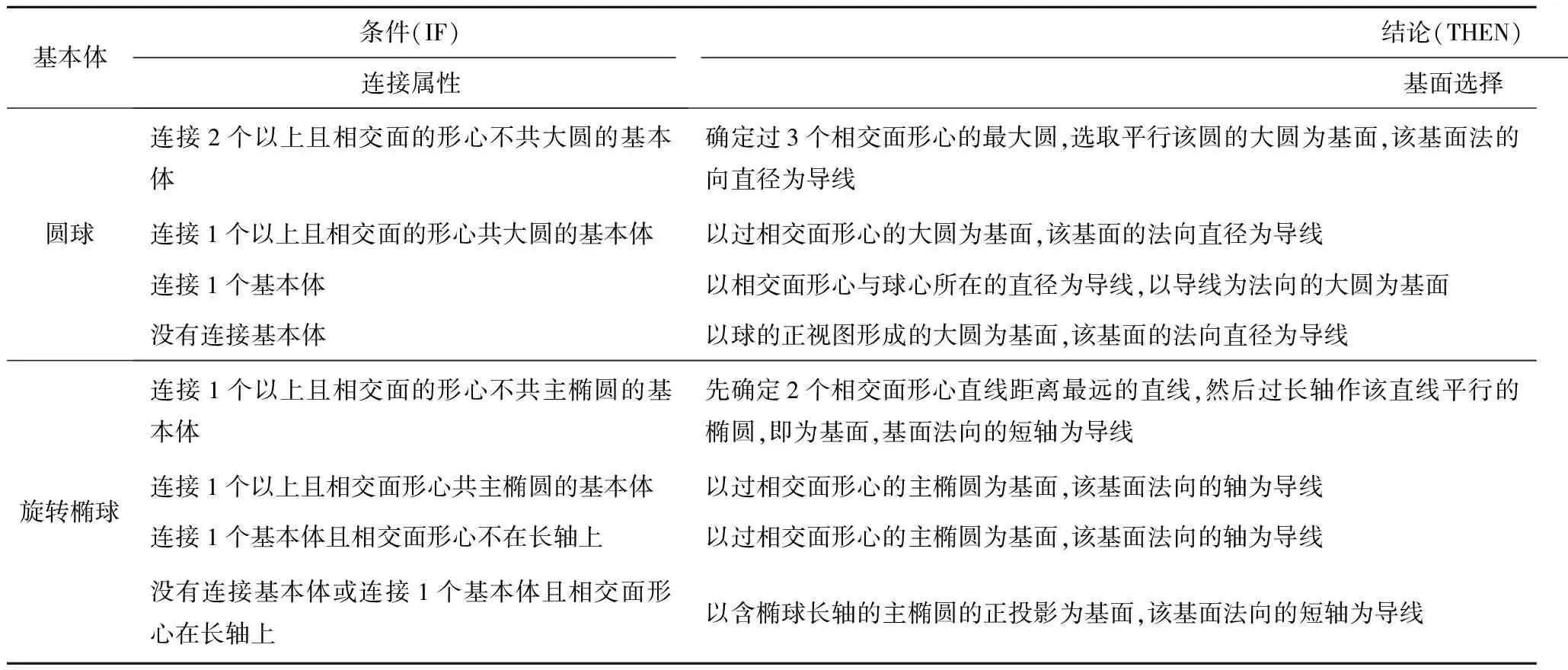
表1 单面基本体基面选择规则
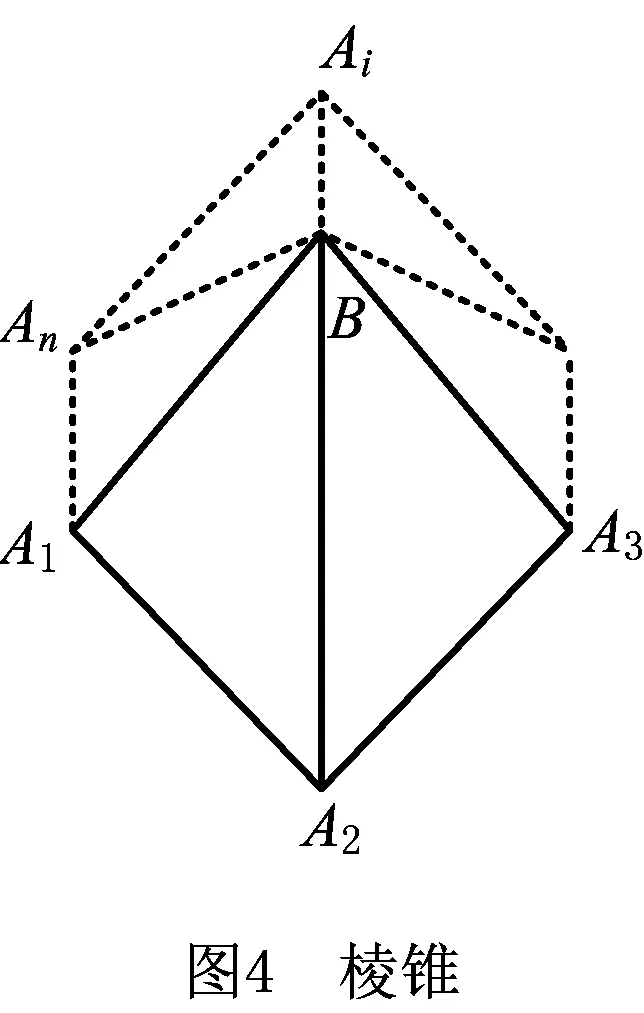
若导线为直线,则由图4可知,当棱锥由三角形A2A3B扫掠而成时,导线及轮廓约束线均为直线,即三角形3个顶点形成3条边,且相交于一点。因此,由基面A2A3B扫掠而成的基本体具有4个顶点6条边。若令多面体的顶点数、棱数和面数分别为V,E,F,则根据多面体欧拉定理V-E+F=2可知,该棱锥有4个面,即表明具有多基面的变尺度多面体必然是三棱锥。
(3)等尺度多面体
等尺度多面体指基面沿导线运动过程中基面的大小和形状不发生变化,结合常见基本体特征可知,等尺度多面体即为柱体。因此,即使导线形状各异,基面各顶点形成的轨迹也平行,如图5所示。

若导线为绕平面外的轴线旋转形成的轨迹,则平面A1A2B2B1各顶点会形成4个终点、4条边,即该柱体有8个顶点、12条边。根据多面体欧拉定理可知,该柱体有6个面,且有2个面为曲面。满足该条件的柱体为扇形环柱,如图6a所示。
若导线为绕平面一边旋转形成的轨迹,则平面A1A2B2B1各顶点会形成2个终点、2条边,即该柱体有6个顶点、9条边。根据多面体欧拉定理可知,该柱体有5个面,且有1个面为曲面。因此,该柱体为基本体中的扇形柱体,如图6b所示。
若导线为直线,则平面A1A2B1B2各点形成4个终点、4条边,即该柱体有8个顶点、12条边。根据多面体欧拉定理可知,该柱体有6个面。因此,该柱体为底面是平行四边形的四棱柱,如图6c所示。

综上所述,本文研究的多基面基本体包括三棱锥、扇形环柱、扇形柱体、底面是平行四边形的四棱柱。针对多基面的基本体,首先根据多基面基本体的类型判断基本体的基面数量并提取相关知识,分别建立第i个基面坐标系。以基面最长边的一点为原点,最长边为X轴,建立坐标系XOY,若基面最长边为曲线,则以曲线的最长投影为X轴的参考。然后将第i个基面的X,Y方向的最大值赋给Lai,最小值赋给Lbi,将该基面对应的导线长度赋给Lci。各类尺寸关系的比较引入黄金分割法则,具体基面选择规则如表2所示。

表2 多基面基本体基面选择规则
3.2 基本体形态提取规则
基本体形态是机械结构形态的基本组成部分,主要描述机械结构形态的类型(线或面轮廓)、位置、空间几何关系等信息。针对确定的基面及其导线基本体,按前文建立坐标系的方法建立XOY坐标系,将基面的X,Y方向的最大值赋给La,最小值赋给Lb,并将该基面对应的导线长度赋给Lc。基本体形态提取规则如表3所示。
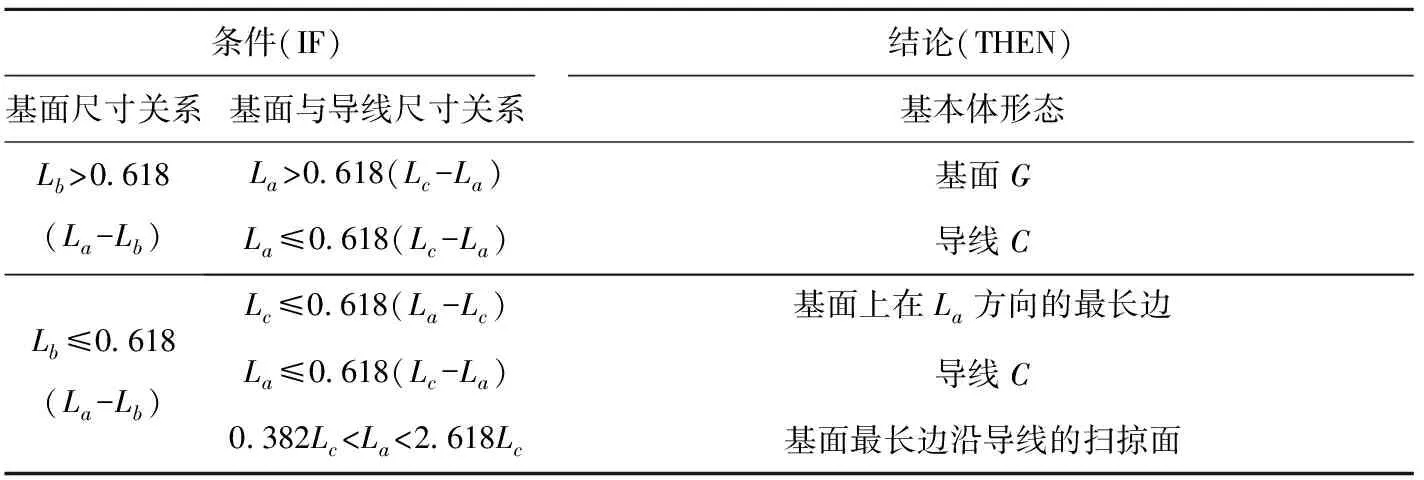
表3 基本体形态提取规则
若基本体在扫掠形成过程中基面等尺度变化,则以基面、基面的边为形态的形心将平移至导线形心处,否则基本体的形态位置不变。表3表明,同一基本体形态可分为线形态和面形态。
3.3 基本体形态融合规则
机械结构形态由基本体形态融合而成,但又不是简单的叠加,而是考虑基本体间的拓扑关系,确定基本体形态间的相交等特性。基本体形态融合算法基于机械结构的基本体布尔运算关系,实现基本体形态的融合,构建机械结构形态。基本体形态融合分为线线形态、线面形态,以及面面形态之间的并、交和差运算。采用机械结构基本体的解析几何表达式可以获知基本体形态的位置,再运用形态布尔运算的包容规则、叠加规则、吸收规则、关联规则等即可构建机械结构形态,实现基本体形态的融合。包容规则的融合结果是基本体形态进行融合运算后,机械结构形态为其中一个基本体形态;叠加规则的融合结果是基本体形态按照原始空间状态直接累加;吸收规则的融合结果是各取基本体形态的一部分构成新的融合形态;关联规则的融合结果是将相互独立的基本体形态通过关联“线形态”构建完整的融合形态。规则主要采用IF-THEN的知识表示方法,其融合算法结合基本体形态数学模型,确定具体的融合位置和融合形态的数学模型,并在融合形态的三维模型构建中采用实线和虚线分别表示增加材料和移除材料的基本体形态。
4 软件实现
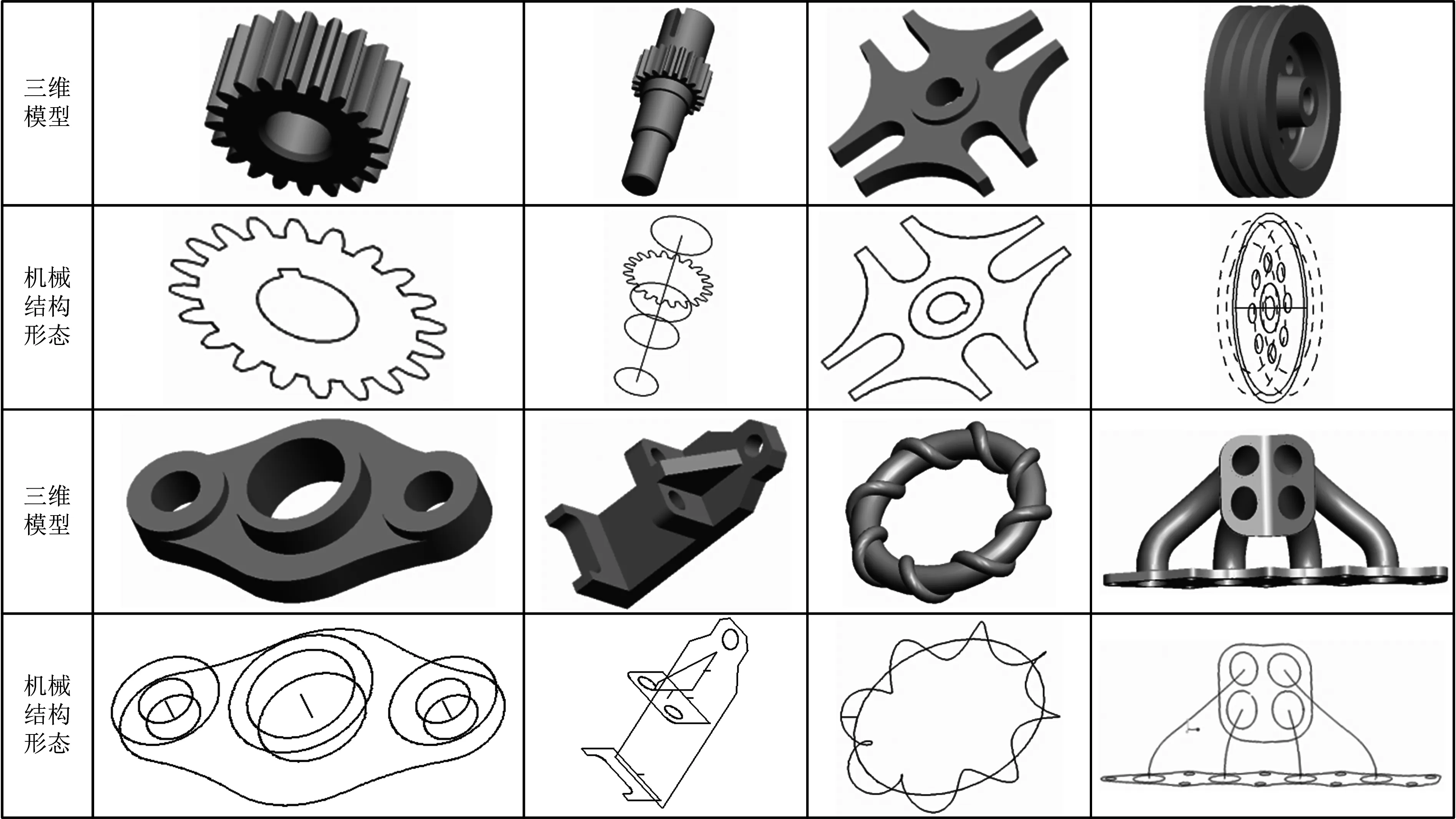
针对每个机械结构的三维模型,采用VS2008与Pro/E5.0的二次开发功能,进行机械结构形态的提取,主要流程如图7所示,其中基本体形态提取和基本体形态融合采用图2所示的方法,数据库、知识库、规则库等采用SQL2000实现。图7所示的基本体形态被提取后,将其几何信息存入数据库,然后根据机械结构拓扑关系和数据库中的几何信息重新构建各基本体形态,并运用基本体形态融合规则构建完整的机械结构形态,最后将该机械结构形态以独立模型文件的形式予以存储,部分机械结构形态提取的结果如表4所示。机械结构形态在机械结构三维模型粗检索的应用中,根据源模型的机械结构形态直接与机械结构形态库中的形态进行拓扑关系相似度和形态特征相似度计算,然后根据形态综合相似度评价指标获取最相似的机械结构形态模型,根据三维模型库与形态库的映射关系获取相应的机械结构三维模型。
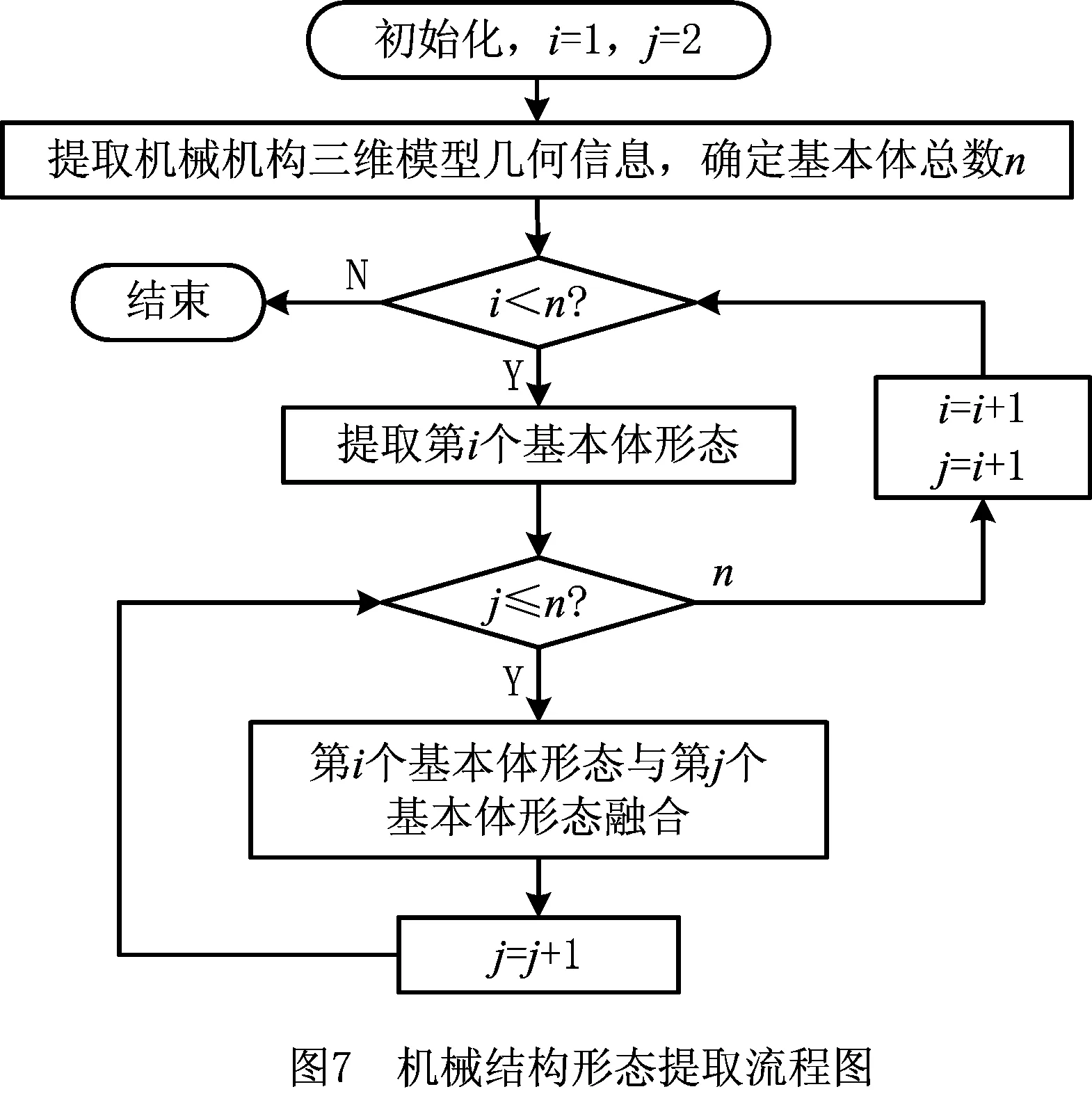
表4 机械结构形态示例
5 实例
甘蔗收获机是我国南部地区主要经济作物收获的机械化设备,在许多高校和研究所的参与下正被积极研发与推广。螺旋扶蔗器是甘蔗收获机的重要组成部分,能否顺利将倒伏的甘蔗拾扶起来,直接决定甘蔗收获机的研发成败。螺旋扶蔗器由外表面螺旋叶片和支撑台柱组成,如图8所示。若基本体几何体素特征不同,则机械结构的布尔运算可能不同,本文实例采用图9所示的实体造型方法。


根据机械结构基本体形态提取的基本规则,构造机械结构形态提取过程,如表5所示。图9中的基本体1为圆台,根据变尺度多面体基面选择规则可知,基本体1的基面为面A,导线为直线ab,轮廓约束线为直线cd。由表5可知,基本体1的基面为圆,各向尺寸相同,即基面与导线尺寸关系满足Lb>0.618(La-Lb)和La≤0.618(Lc-La)的条件,因此根据表3基本体形态提取规则可知,基本体1的形态为导线ab。同理,基本体2的形态为其导线ab。基本体3为扫掠体,根据扫掠体的定义可知基本体3的基面为面A,导线为螺旋线cd,轮廓约束线为螺旋线ab。由表5可知,基本体3的基面和导线尺寸关系满足Lb≤0.618(La-Lb)和La≤0.618(Lc-La)的条件,因此根据表3基本体形态提取规则可知,基本体3的形态为螺旋导线cd。根据各个基本体的空间位置,螺旋扶蔗器的基本体形态提取结果如图10a所示。图10a显示基本体的形态相对独立,因此结构形态必须根据各个基本体形态及其结构布尔运算关系,采用基本体形态融合规则进一步融合。根据图7所示的流程,螺旋扶蔗器的基本体形态融合过程如表6所示。
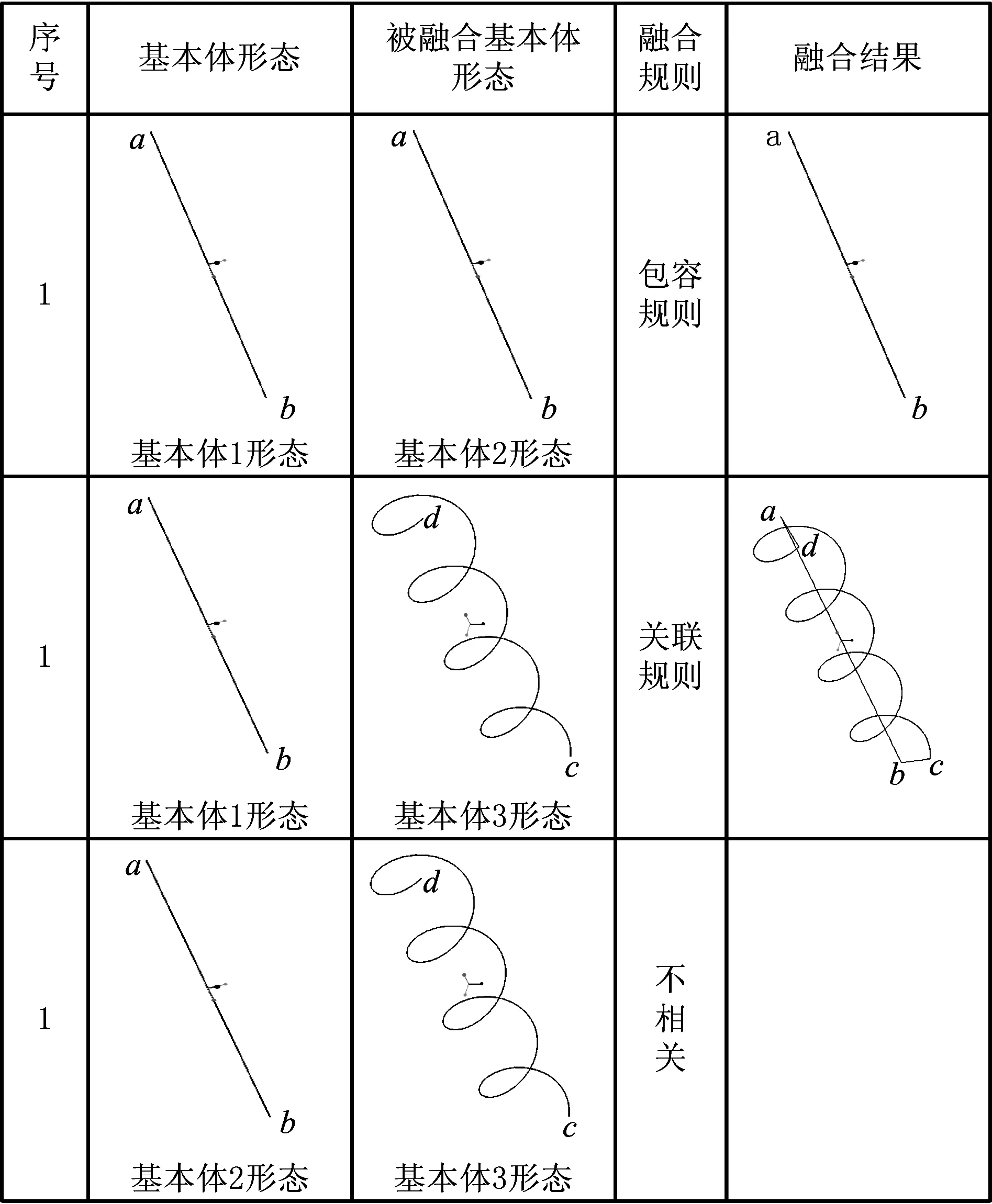
由图9和表6可知,基本体1与基本体2的形态完全重合,且在构建螺旋扶蔗器的建模过程中采用差运算,因此其形态融合采用包容原则。基本体1与基本体3采用并运算,即其空间关系是关联的,而由图10a可知其形态在空间上相互独立,必须采用关联原则将其形态关联,满足基本体的拓扑关系相同。基本体2与基本体3在建模过程中不存在直接的关系,其形态无需融合。因此,各基本体相互间的融合结果如表6所示,螺旋扶蔗器的结构形态如图10b所示。
表5基本体形态的提取
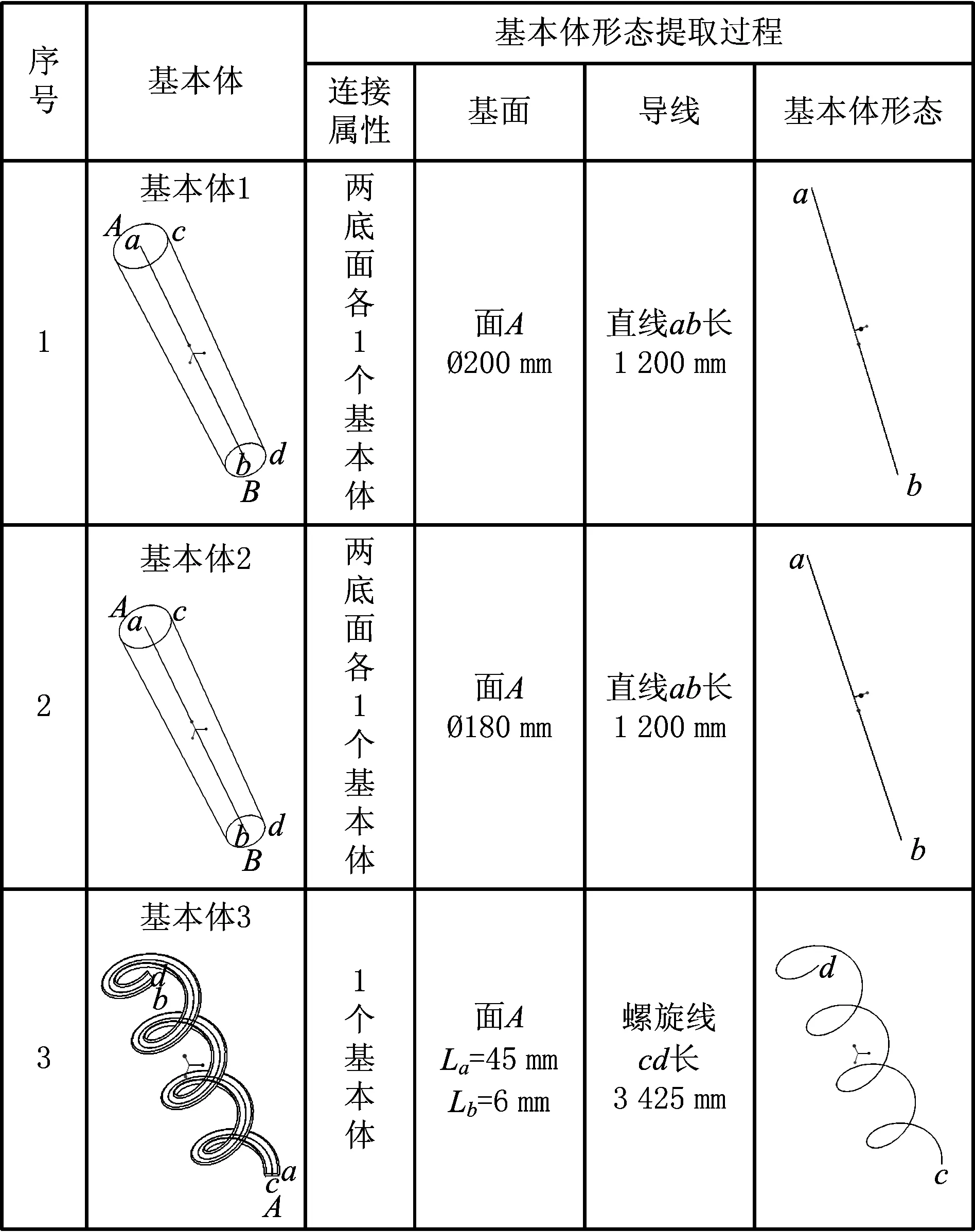
表6 基本体形态融合过程

6 结束语
机械结构形态对原始结构进行特征简化,有利于机械结构三维模型的信息存储,并为三维模型检索提供了搜索途径。本文基于基本体转换模型的研究提出机械结构形态的提取方法框架,通过对单面基本体、等尺度多面体和变尺度多面体特性进行研究,提出机械结构形态提取的基面选择规则、基本体形态提取规则和基本体形态融合规则,实现了机械结构的形态提取。机械结构形态提取是机械结构形态研究的初始阶段,机械结构形态的研究内容极其丰富,如机械结构形态的几何画法、边界检测、融合算法、知识表示及结构形态编码等。基于机械结构形态的三维CAD模型检索是模型粗检索阶段,即检索过程中只对模型形态库的形态进行相似性计算,从而避免模型检索过程中对原CAD模型信息的重复处理。机械结构形态的研究将致力于三维CAD模型重用,以为机械结构设计效率的提高提供一种方法。