液压驱动四足机器人单腿结构设计与分析
2018-12-18马雪亭
马雪亭,董 霞,李 森
(西安交通大学 机械工程学院 机械电子工程研究所,陕西 西安 710049)
1 引言
移动机器人在工业、建筑、军事、农业等领域有广泛的应用前景。根据移动方式,可分为如下几种:轮式、步行(足式)、履带式、其他特殊性机器人。其中,足式机器人有很大的适应性,尤其在非结构性的环境中更有优越性。足式机器人有两足、三足、四足、六足、八足的形式。两足机器人虽然有很好的适应性,但是在保证静、动行走性能和稳定性方面是最困难的,而对于六足、八足的机构形式,虽然足部个数越多越稳定,但是相应的机构的复杂度也在不断增加;因此四足机器人的研究一直是国内外机器人领域研究的热点之一[1]。
在很多情况下,足式机器人要求较高的负载能力,快速启动特性,与此同时,它们还要求具有可携带性,紧凑等特点,而液压驱动有独特的优势:高功率密度比、提供过载保护、较高的带宽[2],因此液压驱动在足式机器人中得到了广泛的应用。目前,国外对液压四足机器人的研究具有代表性的是:美国波士顿公司设计的液压四足机器人BigDog具有惊人的环境适应性,可以在非结构环境路面上稳定行走,可以5km/h的速度小跑,可以爬越35°的坡面,负载55kg[3-5],但是其研究资料并不对外公开;意大利理工学院在液压四足机器人设计方面的研究也比较深入,并且发表了大量的论文。文献[6]对液压四足机器人的研究在国内处于领先地位,其设计的单腿机构图仿照波士顿公司的第二代BigDog的结构,其优点在于腿部运动灵活,负载大,但是由于液压缸多,成本较高,且控制复杂;文献[7]对液压驱动的四足机器人的研究在国内具有相对较高的水平,首次实现了1m/s以上的高速行走。
2 简化结构
2.1 机构模型的建立和简化
通过对现有腿部结构进行分析可知,某大学的单腿结构对液压缸和整个系统的要求较低,且系统平稳性较好,所以选择其作为后续研究的主体。单腿采用4个自由度的机构模型,其中包括三个主动自由度和一个被动自由度。
机器人的腿部在运动过程中,足端所能达到的区域即足端运动空间,它的大小是评价机器人运动的灵活性和适应性的重要指标。因此,机器人腿部结构的设计中,应该尽量有足够大的足端运动空间。机器人的腿部可简化为如下二杆模型,如图1所示。
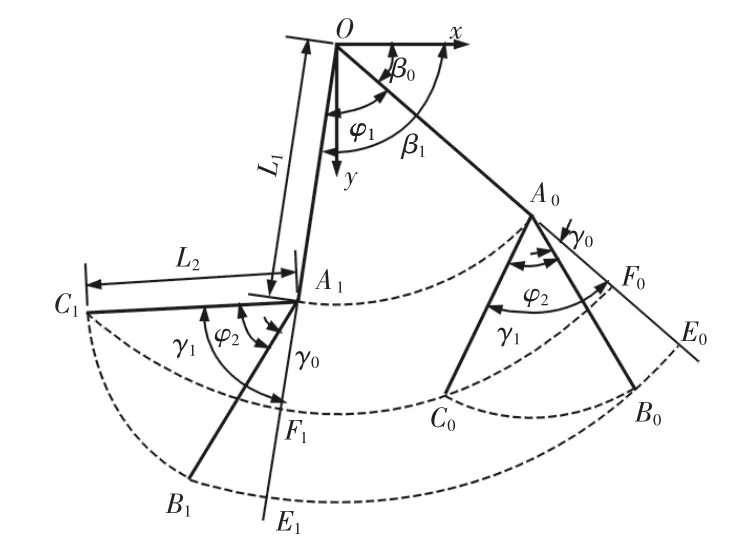
图1 单腿的二杆模型Fig.1 Two-bar Linkage Model of Single Leg
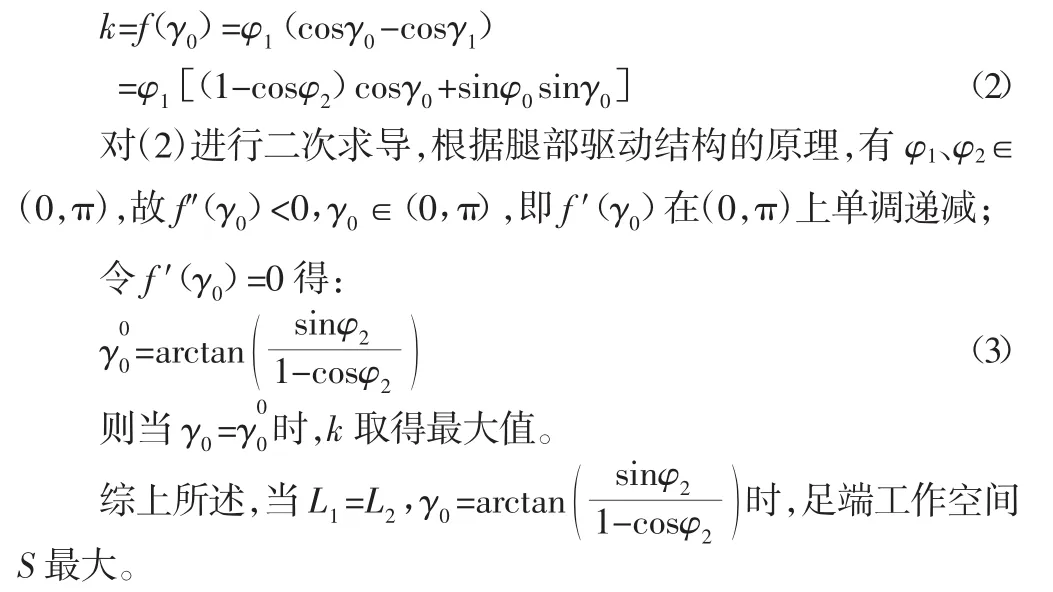
由式(1)工作空间面积S的最大值的求解可分为以下两部分考虑:若k为定值,则当L1=L2时,S取到最大值;若k为变量,则其值的大小受 φ1,γ0,γ1三个量的影响,φ1、φ2通常会受到液压缸行程的限制,这里我们假设φ1、φ2不变,则k是γ0的函数。
设大腿节的长度OA=L1,小腿节的长度AB=L2;设髋、膝关节的转角范围分别为φ1,φ2;足端的工作空间即为上面四段弧B0B1、B1C1、C0C1、B0C0所围成的面积,记为 S。
由图中几何关系,可计算足端B点的工作空间面积:

根据机器人高度的要求选取L1=L2=40cm,设定髋关节和膝关节的目标转角范围为φ1=φ2=90°;可求得γ0=45°,另外考虑到机械结构的干涉取β0≥10°。
2.2 简化模型的仿真
SimMechanics是MatlabSimulink里面的一个组件,SimMechanics包含有七个模块组:刚体子模块组、接口原件模块组、力模块、约束与驱动模块组、检测与促动模块组、运动副模块组、辅助工具模块组。利用SimMechanics可以简洁地搭建机械系统,实现机构仿真和更改机构参数,而这对参数的优化设计是非常有利的。将采用SimMechanics搭建并仿真足端运动空间分析所用二杆模型,以及动力学分析时腿部模型。
为了获得最佳的足端运动空间,在SimMechanics中建立简化模型,如图2所示。

图2 二杆机构仿真模型Fig.2 Simulation Model of Two-bar Mechanism
取 γ0=45°,β0=10°进行仿真,如图 3 所示。从图 3(a)中可以看出,足端工作空间的面积虽然比较大,但是其位置和形状都不理想,表现为运动空间前端点和后端点的高度落差太大,因此需要改进。由前述几何关系可以看出减小β0可以改善这种情况,β0=10°已经取到最小的值,故不能继续减小β0;从结构分析中知道减小γ0会缩小运动空间的面积,但是另一方面会改善运动空间的位置和形状,后者相对更重要,因为若运动空间处于不合适的空间位置就不能使足端达到预定的位置,即使其有比较大的面积对腿部运动也是没有意义的。故逐渐减小γ0得到图3(b)γ0=30°、图3(c)γ0=15°所示的足端运动空间。从图中可以直观地看出,当γ0=15°时,足端运动空间虽然面积相对减小,但是其形状和位置都比较理想。
3 单腿结构设计
根据简化模型以及仿真的分析结果,单腿结构参数如下:

3.1 关节结构选择
液压驱动机器人所受的载荷一定时,为了使得机器人在行走过程中具有良好的性能,因此,液压缸的受力应越小越好。根据文献[8]可知,在机械尺寸基本不变的基础上,带有平行四边形的腿部结构,如图4(a)所示。具有相对更大的运动范围,并且其速比相对比较平稳,有助于减少液压缸运动控制的复杂性。
实际中,四足动物在行走时大腿将承担比较大的载荷,小腿载荷较小;并且与躯干相连接的大腿具有比小腿更大的侧向刚度。所以将在大腿关节处使用带平行四边形的关节结构,而在小腿处采用传统的关节结构,如图4(b)所示。
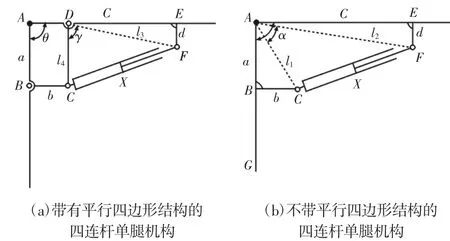
图4 带有、不带平行四边形结构的四连杆单腿机构Fig.4 Single-Leg Four-Bar Linkage Mechanism With and Without Parallelogram Structure
3.2 液压缸的安装位置
腿部设计的一个要求是要尽量结构紧凑,这就要求液压缸的尺寸不能过大,并且具有合适的安装位置。液压缸位置及推程与关节转角示意图,如图5所示。

图5 液压缸位置及推程与关节转角示意图Fig.5 Schematic Diagram of Hydraulic Cylinder Position,Extending Stroke and Joint Angle
图中:L0—液压拉杆完全收回时液压缸的总长度,即液压缸的最小安装长度;L1—液压拉杆完全伸出时液压缸的总长度,即液压缸最大长度;扇形BOC—关节的运动范围,其中r是液压缸在腿部的支撑点到关节支撑点的距离,设液压缸的推程为S。

根据大腿和小腿的长度选取最小安装尺寸345mm,行程80mm的液压缸。大腿驱动液压缸按照实线AB所示的形式进行配置,小腿驱动液压缸按照虚线A’B所示的形式进行配置。计算其他尺寸,得到腿部结构,如图6所示。
图6 腿部结构二维图Fig.6 Two-dimensional Figure of Leg Structure
4 腿部结构仿真及分析
4.1 运动学分析
在2.2中简化模型得到了合适的足端运动空间,因此对腿部结构进行运动学仿真,验证是否能达到理想的运动空间,如图7所示。以大腿关节处为坐标原点,则足端的坐标位置为:
上述三式联合求解,得到足端坐标x,y,进而求解液压缸的长度 c1,c2。

图7 腿部结构主要尺寸Fig.7 Main Size of Leg Structure
在SimMechanics中建立模型,如图8所示。
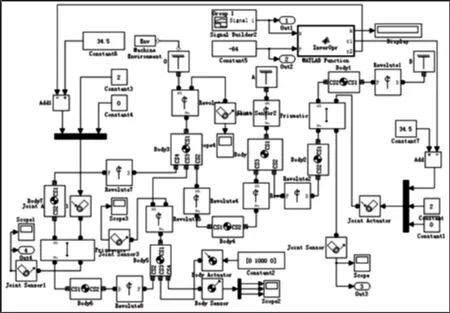
图8 腿部结构仿真模型Fig.8 Simulation Model of Leg Structure
对此给液压缸添加适当的驱动来对模型进行仿真,得到实际腿部结构的足端运动空间,如图9所示。由图9可看出,实际腿部结构的足端运动空间与二杆机构分析时的足端运动空间基本吻合,说明液压缸位置配置合适。
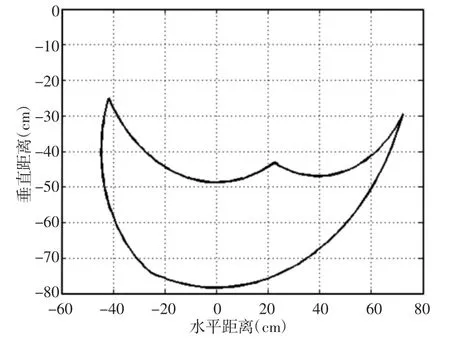
图9 实际足部运动空间Fig.9 Actual Foot Movement Space
4.2 动力学分析
由于液压驱动腿部结构必须满足结构紧凑、具有足够运动空间的要求,使得液压缸支撑点必须离关节点很近,这样在腿部所受力在传递给液压缸时就会被放大,而腿部的工作姿态会影响这一放大倍数,因此需要分析不同的姿态在不同的工作条件下的情况,以便在对应的工况下选择合适的腿部姿态,减轻液压缸的载荷。因此,定义大腿顶端关节处到足端的垂直距离为机器人腿的工作高度,而足端在水平方向的运动范围成为工作区间。若机器人在步行时,限定足端抬高的最大高度≥10cm,从运动学分析的结果可以确定机器腿的工作高度应≥60cm,若限定机器人行走的最大步幅≥40cm,则根据运动空间的限制,工作高度应≤75cm。四足机器人行走在复杂的地形上时,其腿部将受到复杂变化无规律的力。要使得机器人能在这样的条件下稳定行走,首先必须让腿部受力之后在结构上具有稳定性,特别是让液压缸在正常的工作条件下运动,然后才能由控制部分实施控制以达到目的。后面将针对工作高度(60~75)cm进行分析,以期这部分动力学分析能为机器人在不同的条件下选择不同的步态提供依据。为了得到规律性的结果,将给足端施加Fy=1000N竖直向上的力不变,逐渐增加水平方向受力Fx,对工作高度(60~75)cm对应的每一个工作区间进行受力分析,即分析足端在工作空间不同位置时,液压缸的受力情况。


图10 不同受力条件下不同工作位置时大、小腿驱动液压缸受力情况Fig.10 Stress of Hydraulic Cylinder Driven By Karge and Small Legs Under Different Stress Conditions
从图10中可以得到以下信息:大腿驱动液压缸受力总体上大于小腿驱动液压缸;对于大腿驱动液压缸,当足端水平方向上受力增加时,液压缸受力较小的区间将向x轴负向移动。对于小腿驱动液压缸,当足端水平方向上受力增加时,液压缸受力较小的区间将向x轴正向移动。据此,我们可以更好的选择机器人在不同工况下的腿部动作。例如,机器人在爬坡时,根据坡度的不同,可以让足端工作区间不同程度的偏向x轴负向,以期让液压缸受力变小,来提高机器人的适应水平。
5 结论
对液压四足机器人的研究现状进行分析,为单腿的结构设计提供了借鉴。运动学仿真验证了腿部结构可以达到理想的运动空间。对受力分析结果进行研究,在不同的工作条件下,通过让足端工作空间偏向液压缸受力较小的区间,从而使得液压四足机器人在不同的工况下有更好的适应性。
