基于RFID辅助的车载SINS/OD定位研究
2018-12-17仲启媛谭立龙张彦涛
陈 思,仲启媛,谭立龙,王 鹏,张彦涛
(火箭军工程大学,西安 710025)
0 引言
发射车车载定位定向技术是实现导弹无预设阵地机动发射的关键技术,本质是指车载导航系统在发射车行进过程中实时提供精确的经纬度、高程、北向方位角和姿态角等导弹瞄准与发射所需的基本信息[1]。基于作战应用的车载定位定向系统要求具有自主性、快速性、精确性和抗干扰性。从国内外发展历程上看,捷联惯导系统(SINS)凭借其完全自主性和实用性得到广泛认可,但由于误差随时间累积而不能长时单一使用[2];最初采用零速修正或地标点停车修正方式[3]的车载导航因其削弱了车载发射的机动性而不被青睐;采用SINS/GPS组合导航系统[4]虽然抑制了误差发散,但GPS信号易受遮挡且技术受制于人,因此不能作战使用,即使采用国产北斗系统来定位也存在卫星信号被干扰等类似问题;采用地图匹配技术[5]来辅助有一定效果,但存在地图精度要求高、数据处理技术也有较高要求等问题;SINS/里程计(OD)组合导航采用航位推算技术,其自主性好,误差发散得到一定程度抑制,但由于车轮空转、打滑等因素导致长时导航误差较大[6],也无法解决野外导航系统误差超范围或者出现故障需要重新启动而无法有效快速获取初始地理信息的实际问题。
近年来,物联网技术迅猛发展,带动了射频识别技术(Radio Frequency Identification Devices,RFID)的快速提升与应用。RFID利用射频信号将储存于标签内的信息传送给RFID阅读器,是一种新兴的识别与定位手段,具有构造简单、寿命长、抗恶劣环境、非接触、快速、安全、准确、价廉等优势[7]。RFID的军事应用可追溯到二战时期,美军将其用于识别盟军飞机,近年来军用射频标签被应用于军事物流、军车定位等领域。结合现阶段普遍采用的SINS/OD组合定位定向系统的优势,在发射车作战区域内设置射频定位系统,弥补其不足,辅助车载定位定向,具有可期的前景。
1 RFID定位系统的设计
1.1 RFID工作原理
RFID由标签、阅读器、天线组成:标签存储数字信息,阅读器控制射频模块通过天线发射射频信号,读取对应标签信息,如图1所示。RFID可识别高速运动物体、穿透塑料等材质识别,并可同时识别多个标签[8]。

图1 RFID工作原理图Fig.1 RFID working principle
1.2 发射车利用RFID定位方案设计
标签分为无源标签和有源标签,鉴于作战实际,采用无源标签并加密处理;阅读器可采用高速阅读器,其识别标签并读取内置信息的时间为20 ms左右;识别距离可根据需求调节选用频率,几十米内的识别距离均可选。
1.2.1 方案一
射频标签铺设于车道路面中央,标签内储存该位置的地理信息代码(经纬度、高程等),阅读器安装在发射车底部,车辆通过标签上方时,识别读取并传送至车载计算机,迅速与车载惯性导航系统定位信息进行融合处理。考虑到碾压破坏等问题,可采用凹陷下沉或贴于路面反光路钮内的方法,如图2所示。
该方案经多次参数调整、行车实验验证,一旦识别,定位精度能达到0.5 m以内,完全满足行进间定位修正要求,而且无需停车,简单易行,快速行车(30 km/h左右)时单点识别效果最佳。
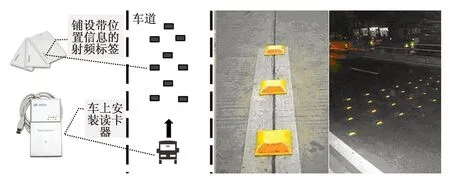
图2 路面安装射频定位示意图Fig.2 Driveway installation of RFID positioning devices
1.2.2 方案二
射频标签等距安装在路中隔离带或者路边防护桩上,阅读器安装于发射车左(右)侧与标签同高位置,在行进间读取位置信息,称之为路标定位,如图3所示。

图3 路侧安装射频定位示意图Fig.3 Roadside installation of RFID positioning devices
图中:D为车道宽;d为发射车宽;d1为该标签垂直对应车道中线处距离,标签内存储该标签垂直对应车道中线处位置坐标代码。根据向有特种超宽车辆驾驶经验的驾驶员问卷调查可知,所有被调查人员均表示驾驶车辆保持在单一车道内行驶非常容易,以此为实际可行条件进行定位误差分析。
由图3可知,在发射车保持同一车道内行驶的条件下,横向理论定位误差为
(1)
纵向误差由识别距离、识别角度和车速共同决定。纵向定位误差示意图见图4。
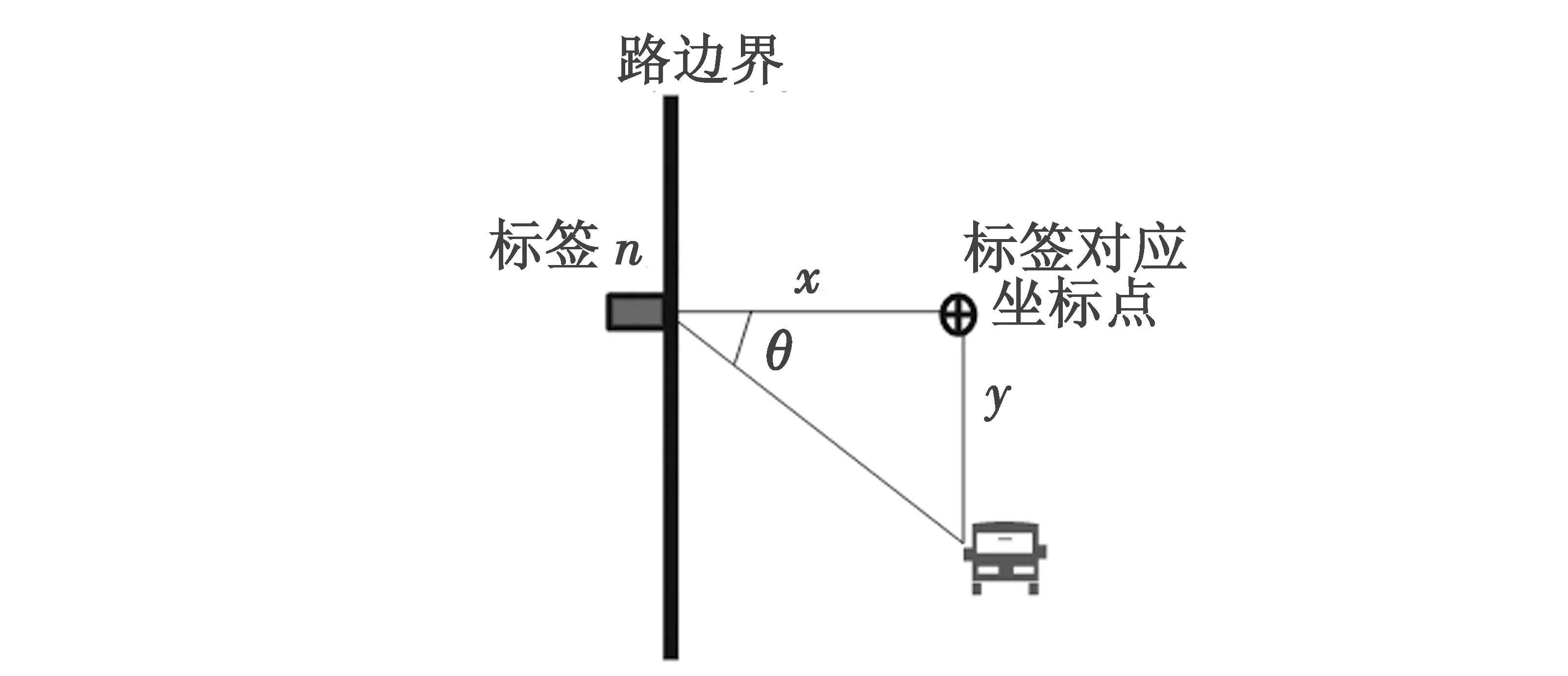
图4 纵向定位误差示意图Fig.4 The longitudinal positioning error
图中:x,y分别为射频卡接收到阅读器发出的射频信号时两者的横向距离和纵向距离;θ为标签接收到信号时的角度。则纵向误差为
δy=xtanθ-v·t0
(2)
式中:v为车速;t0为射频识别时间。
则定位坐标点概率偏差为

(3)

在实际工程应用中,通过调整射频识别距离、功率、识别角度,在正常行车速度20~50 km/h情况下可以忽略反应距离,因为实地实验时也无法测量,只需测量识别到标签时车辆实际位置与理论位置之差。在一段废弃高速公路上进行实地实验,标签间隔10 m,共计30个,铺设300 m长距离,合理调节配置射频识别参数,实验采用民用斯太尔大货车(宽2.5 m)分别以20 km/h,30 km/h,50 km/h进入识别区域,以差分全球定位系统(DGPS)定位数据为参考基准,有效识别率达到97.7%,所以每组取24个实验定位数据分析如表1所示。
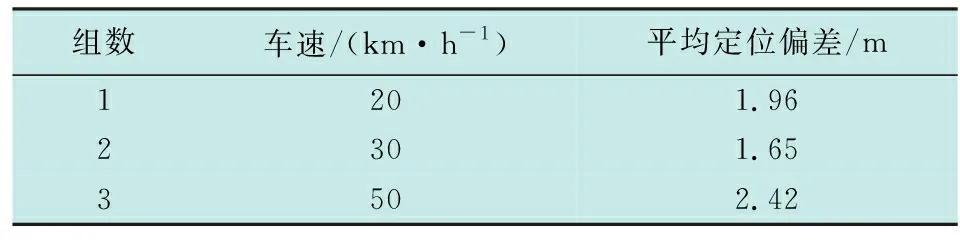
表1 不同车速下射频定位偏差
从实验结果来看,RFID在车辆运动中识别标签时几乎没有丢失,同一参数下,过快或过慢车速均使得误差增大,在该实验条件下,30 km/h的行车速度定位精度最高。
1.2.3 方案三
在长隧道或者洞库顶壁上安装多个阅读器,识别贴于发射车上方的无源标签,在车辆正常行进中实时定位,并将定位信息通过数据链同步传给车载计算机进行信息融合。根据相关实验表明,该方式下定位精度能达到0.3 m以内。相关硬件设施投入较大,但可以与民用RFID车辆识别发展思路契合,通过军民融合方式解决隐蔽性和高成本问题。限于篇幅,在此不过多阐述此类较复杂方案的原理。
2 车载SINS/OD组合导航分析
SINS具有自主性,是作战时车载定位的首选设备,通过高精度的陀螺和加表进行导航解算,从出发点进行位置、姿态的累积推算[9],如图5所示。
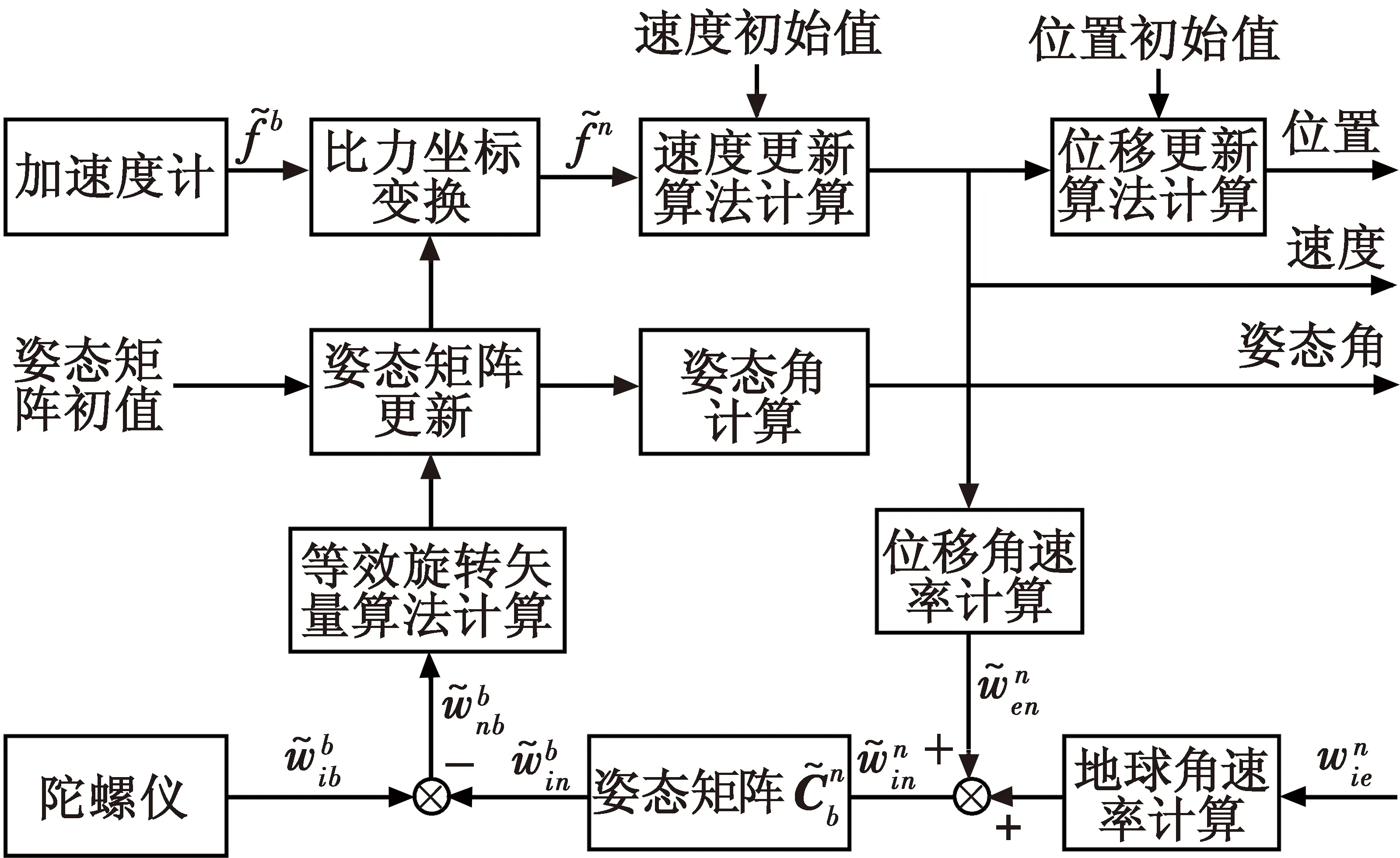
图5 捷联惯导解算图
短航时下,SINS解算精度特别高,但由于常值漂移和随机漂移存在,长航时下,误差不断累积,直至超出误差允许范围,定位数据失去作战使用价值。因此,现阶段在研设备普遍采用高精度里程计(10-4m/s)测速来抑制其误差发散,延长了满足战标要求精度下的导航定位时间,达到了较好的效果。
2.1 惯导和里程计误差分析
2.1.1 里程计误差分析
参考系选东-北-天(ENU)地理系作为导航坐标系(n系),惯组坐标系与载车坐标系认定重合(b系),OD坐标系(m系)为与车体固连的“右-前-上”右手直角坐标系,因此OD的理论输出在m系上可以表示为
(4)


(5)


(6)
合理舍去δKD和φ的高阶小量,展开得到

(7)
至此,推导出OD的输出速度误差为
(8)
2.1.2 SINS误差
根据文献[10],推导分析小失准角下SINS误差模型如下所述。
姿态误差为
(9)
速度误差为



(10)
位置误差为

(11)
式中:

2.2 SINS/OD组合导航模型
在分析误差模型的基础上,建立SINS/OD组合导航模型,其原理如图6所示。

图6 SINS/OD组合导航图Fig.6 SINS/OD integrated navigation
3 RFID辅助修正SINS/OD组合定位模型
3.1 方案设计
如果不考虑作战应用,民用领域对SINS/OD系统的最佳修正方式莫过于GPS、北斗和已知点停车修正。军用领域可以转换思维模式,提出“将卫星定位移到地上,让静态地标活动起来”的思想,利用RFID定位方式弥补战时卫星受损、停车定位限制机动等传统方式的缺陷。
方案设计如下:如图7所示,车载SINS/OD在战区内按预定作战计划行进,不必刻意行驶至布置有无源RFID标签的区域,而是在经过长航时、定位误差增大时,在行车过程中顺便路过某个RFID定位区,辅助修正SINS/OD,使之降低误差,然后再度续航,投入战斗。
图7 方案示意图Fig.7 The proposed scheme
3.2 SINS/OD/RFID组合模型建立
3.2.1 系统总体设计
OD和RFID的定位修正都能提供Kalman滤波观测值,给予SINS状态量两个不同的误差修正量。两者观测精度不同,协方差矩阵存在差异,并且RFID定位修正的采样频率远远低于OD,导致观测量输入滤波器具有时间不同步性。采用并行Kalman滤波(PKF)可以解决该问题。
如图8所示,OD对加表、陀螺和姿态误差的观测性较强,可以同时修正速度、位置、姿态、加表和陀螺;RFID定位修正点只提供绝对位置坐标,除状态量中的速度、位置以外,其余量可观测性较弱,但是其观测值精度高(0~2 m)。系统内设置断点,当采集到OD或RFID定位数据时,自动判断选择相应滤波器进行导航修正。其中,SINS高度通道的发散由车载气压高度计抑制,RFID定位信息包含经纬度、高程、重力加速度,高程误差几乎为零,直接用于替换解算值。
图8 SINS/OD/RFID组合导航原理Fig.8 SINS/OD/RFID integrated navigation principle
3.2.2 系统状态方程

系统状态方程为

(12)

3.2.3 系统观测方程
SINS/OD滤波器观测方程为
ZOD(t)=HOD(t)X(t)+VOD(t)
(13)
式中,VOD(t)是零均值方差为ROD的量测噪声向量。
观测量ZOD(t)算式为
(14)
量测矩阵HOD(t)展开式为
SINS/RFID滤波器量测方程为
ZRFID(t)=HRFID(t)X(t)+VRFID(t)
(15)

根据上述各RFID定位结果分析,观测噪声方差RRFID选择为Rλ=(1.2 m)2,RL=(1.2 m)2。
4 车载实验及分析
为了验证RFID辅助修正SINS/OD长航时组合定位效果,采用某车载定位定向设备进行了一次长达3.6 h的跑车实验,行程约300 km。实验用车载定位定向系统参数如下:SINS系统误差是:陀螺常值漂移0.01 (°)/h,加速度计常值漂移10-4g,标定OD刻度系数误差是0.001 31。实验全程模拟实际应用情况,行车路线如图9所示。
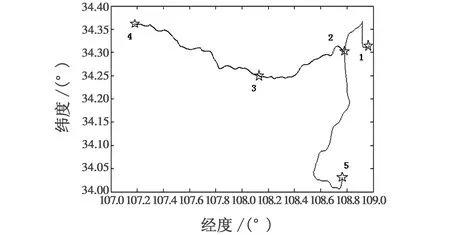
图9 行车轨迹图Fig.9 Driving track
从某火车站1点出发,途径2,3,4点,并在4点折返至4-3-2-5点,从2点开始假定里程仪损坏。长航时(约1 h)后,在行车过程中随机大间隔引入RFID定位,定位偏差合理认定为1.2 m。行车过程中定位基准由车载GPS提供。
SINS/OD定位偏差如图10所示。
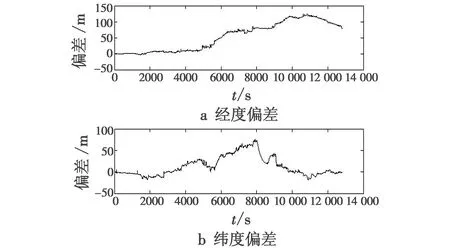
图10 SINS/OD定位偏差Fig.10 SINS/OD positioning errors
分析图10可知,SINS/OD组合能较长时间保持较高的定位结果。根据高精度定位应用需求,以20 m为参考精度要求,那么在该条件下能保持约1.5 h,之后误差逐渐发散,在模拟里程计损坏后更是达到100 m以上的定位误差。
若根据使用情况,模拟车辆分别在5000 s,5800 s,7900 s,10 000 s 时经过4个RFID定位区域,获取了修正信息,则结果如图11所示。

图11 RFID辅助修正后的定位偏差Fig.11 Positioning errors revised by RFID
由图11可知,定位误差大幅减小,误差控制在精度要求范围内,达到米级,有效定位航时延长了一倍多,达3.6 h以上。
5 结束语
本文从作战应用背景下的现阶段发射车车载定位定向技术存在的问题出发,探讨并提出了应用RFID定位修正SINS/OD方案。对工程背景下的RFID行车定位方式进行设计与验证,得出其定位精度高、易于实现的结论;同时,为解决长航时下SINS/OD精度不满足要求的问题,建立SINS/OD/RFID模型对其进行了修正改进,并结合解决问题的实际情况,进行一次模拟长航时跑车实验。实验结果表明,随机4次RFID定位辅助的SINS/OD抑制了误差发散,将满足精度要求的导航时间延长近一倍,提高了发射车在野外无阵地依托时的作战能力,为工程实现提供一定的参考。
