动中通卫星识别跟踪系统的研究与设计
2018-12-17张峰干胡豪杰
章 彪,张峰干,高 策,胡豪杰
(火箭军工程大学,西安 710025)
0 引言
随着卫星通信技术的发展,在运动中实现连续稳定地与卫星交换数据变得越来越普遍。动中通即运动中的卫星通信,作为移动卫星通信的一种,它不仅具有卫星通信的优势特点,还具有灵活机动的特性。动中通系统正常工作的关键是其测控系统能够使天线波束时刻准确对准目标卫星,其原理为通过感知、测量元件获得载体姿态信息和信号强度信息,经一系列坐标变换、姿态估计算法和跟踪算法得到天线波束控制信息,驱动天线伺服机构,控制方位、俯仰、极化电机实时调整天线指向,使天线波束时刻指向目标卫星[1-5]。
卫星识别跟踪系统作为测控系统的子系统,是其正常工作的关键。目前卫星识别跟踪系统采用单一检测源的设计思路,即信标机检测卫星信标信号或卫星电视接收机检测DVB-S2信号,采用单一检测源的设计方案,当目标信号缺失或太弱时,检测设备无法正常工作,通用性差。本文针对卫星信标信号频带窄、强度弱和卫星电视信号频带宽、强度强的特点,根据动中通系统实际工作情况,设计一款双源卫星识别跟踪系统,能够同时利用卫星信标信号和卫星电视信号,提高了动中通系统的通用性,降低了检测设备的成本[6-8]。
1 卫星检测识别方案研究
当前国内外都在加快动中通相关技术的研发,国外比较突出的有美国Sea Tel公司、以色列的RaySat公司、日本的NKH公司等;同时,国内也涌现了很多动中通系统研发科研单位和企业,成功地打破了国外长期垄断动中通系统的局面[9-14]。国内外动中通系统设计厂商的卫星识别跟踪方案,都是利用单一信号源完成卫星识别和卫星跟踪,通用性不足。国外动中通设计厂商主要利用DVB-S2信号完成卫星的识别跟踪[15-16];国内动中通普遍采用信标机检测信标信号进行对星[17-18]。
卫星信标信号具有强度弱、频带窄的特点,由于卫星受太空摄动力影响、动中通系统本振不稳以及动中通在运动过程中受到多普勒效应的影响等原因,要使系统时刻准确锁定信标信号,对系统精度要求较高,目前市面上的动中通系统采用的信标机成本动辄上万,不利于低成本化;卫星电视信号(DVB-S2)频带较宽,易于捕获,其强度变化较敏感,通过检测其强度的变化能够指示动中通系统时刻对准卫星,完成跟踪的功能。本文系统综合利用信标信号和卫星电视信号完成卫星的识别和跟踪,当某种信号缺失的情况下,系统能够搜索另一种信号完成卫星的识别和跟踪,增加了系统的通用性;同时,系统敏感卫星电视信号强度变化指示控制系统调整姿态,响应速度快,跟踪精度高。
1.1 信标机检测信标信号
卫星信标信号是表征卫星存在的一种特殊信号,通常用于卫星地面测控站对卫星的搜索、跟踪和测控等,具有频带窄、强度弱的特点,从卫星发射升空开始,信标信号便连续不断地工作到卫星寿命的终结。每颗卫星上一般有一个到数个信标信号,通常每个波段的各个极化信号中各存在一个信标信号,部分卫星不同波段信标的频率如表1所示。通过在卫星下行信号中是否检测出特定频率的信标信号可以判断移动通信系统是否对准目标卫星。

表1 部分卫星信标频率表
1.2 一体化调谐器检测卫星电视信号
卫星电视信号(DVB-S,DVB-S2)具有频带宽、强度大的特点,经接收、调谐解调后输出的数据流中除了音视频内容外,还加入了许多辅助数据信息。通过这些辅助数据信息,可以完成卫星的识别。数据流是以包的格式传送的,包头标识字节为0X47,数据流中的网络信息表(NIT)提供有关物理网络的信息,NIT携带了网络识别符(Network_ID,NID)信息,每个网络都有唯一的识别符,由于NIT中的NID具有唯一性,所以可以通过提取数据流中的NID来识别卫星[19]。部分卫星网络识别符(NID)如表2所示。
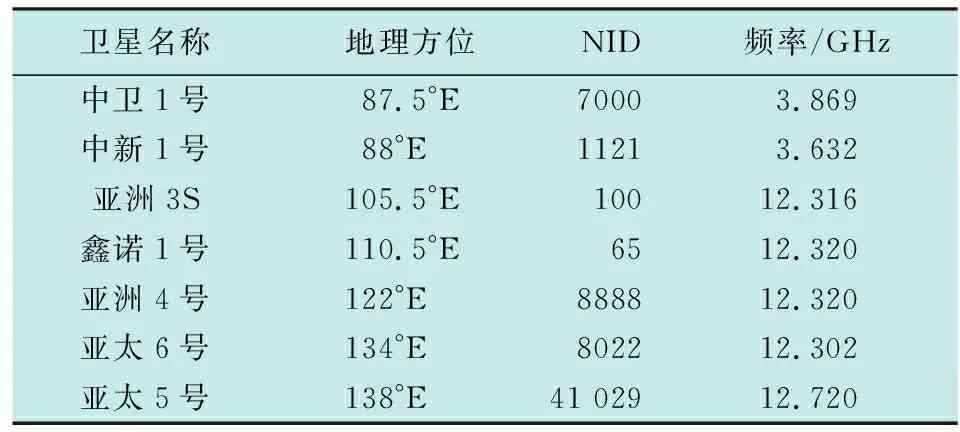
表2 部分卫星的NID
1.3 调制解调器检测通信载波信号
当前卫星通信已普遍采用数字信号传输,数字通信载波有多种信道调制和信道编码方式。不同的卫星在通信时,调制方式、编码方式、极化方式、符号率、卷积率往往不全相同。通过检测卫星通信载波信号特定的编解码方式可以识别卫星。
2 双源卫星检测识别系统的检测原理
动中通系统在工作过程中,会经历初始捕获、跟踪、阴影和再捕获阶段,其状态转换如图1所示。本文综合利用信标信号窄频带、唯一性和卫星电视信号宽频带、强度大的特点,提出一种窄带识别卫星、宽带跟踪卫星的卫星识别跟踪方案。在动中通系统初始捕获和再捕获阶段搜索目标卫星时,无法确定被检信号是否为目标卫星转发的信号,通过检测是否收到信标信号判断动中通系统是否对准目标卫星。在跟踪阶段,载体姿态变化较小,动中通天线波束已经对准了目标卫星所在的大致空域,通过检测卫星电视信号的强度变化,根据信号强度最大值原则,微调天线指向,使天线波束时刻准确对准卫星,保证通信链路的畅通。该方案不需要对卫星电视信号解调解码,仅利用卫星电视信号的信号强度作为反馈信号指示测控系统调整天线波束,降低了系统的复杂度,结构简单、成本低廉,响应速度快,容易实现。
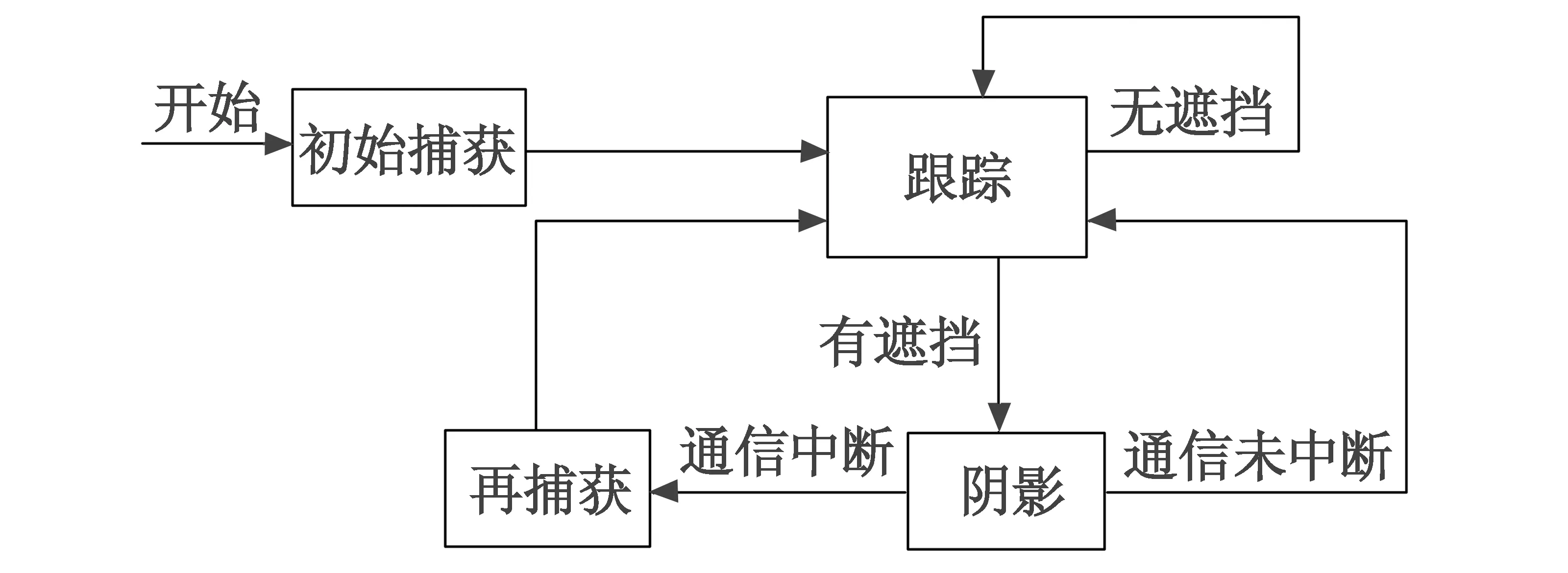
图1 工作状态转换图Fig.1 Working state transition diagram
2.1 信标信号检测原理
信标信号是卫星固有的信号,通常分布于卫星下行频带的边缘,带宽约为50 kHz(常见于Ku波段信标),对信标信号的检测通常是检测其信号强度,检测过程分为下变频、低通滤波、AD采样、频偏校正、对数放大、信号强度检测,图2为卫星信标信号检测原理图。包含信标信号的950~2150 MHz的第一中频信号经过下变频输出给低通滤波器,滤除高频杂波后,经过A/D变换,计算频偏并纠正,最后输出给对数放大器,得到与信号大小成正比的电压值[20]。
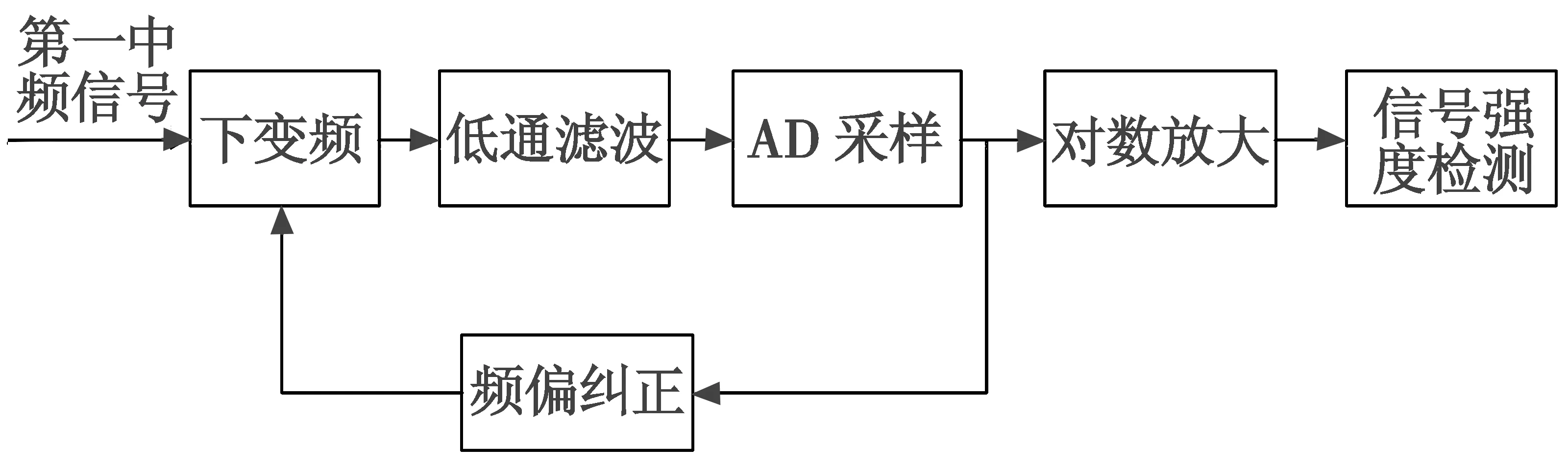
图2 信标信号检测原理图Fig.2 Detection principle of beacon signal
2.2 DVB-S2信号强度检测原理
所谓信号强度是指卫星信号的包场大小。DVB-S2信号包含在卫星的下行信号之中,检测DVB-S2信号强度的方法有两种:一种是软件检测,即将下变频的信号AD采样,做傅里叶变换,观测其频域的幅值;另一种是硬件检测,即将下变频后的信号直接发给AD8310对数放大器,直接得到与信号大小成正比的电压值,在系统实现时通常采用后一种方法。图3为DVB-S2信号强度检测框图。

图3 DVB-S2信号强度检测框图Fig.3 DVB-S2 signal strength detection
3 系统设计
利用双源卫星检测识别系统的检测原理,完成其软硬件设计。
3.1 硬件电路设计
图4为硬件电路原理框图,主要在动中通系统初始捕获和再捕获阶段完成信标信号的检测用于识别卫星,在跟踪阶段完成卫星电视信号强度的检测用于跟踪卫星。
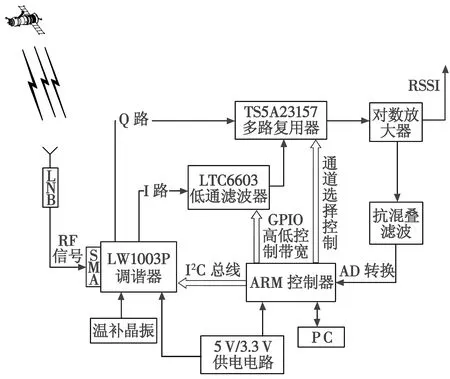
图4 硬件电路原理框图Fig.4 Principle of hardware circuit
高频头(LNB)将Ku波段信号第一次下变频为950~2150 MHz射频信号,该信号进入调谐芯片完成二次下变频变为零中频的信号,输出两路信号。
I路信号经过低通滤波器滤除高频杂波得到信标信号后进入多路复用器,Q路信号直接进入多路复用器,主控CPU通过输出高低电平控制多路复用器选择通路,通过I2C总线对调谐芯片进行控制,设定调谐芯片的本振及增益,在初始捕获和再捕获阶段,I路信号通,系统检测出特定频率的卫星信标信号用于卫星识别,在跟踪阶段,Q路信号通,信号直接进入对数放大器,最终输出与卫星电视信号幅度成正比的电压值用于卫星跟踪。
主控CPU:STM32F407ZGT6,该芯片是基于CORTEX-M4内核的,有3个I2C总线控制,多个DAC,ADC通道,主频能达到168 MHz,本系统采用LQFP144引脚封装。主控CPU用来控制和协调各模块电路的工作。主要利用I2C总线完成对调谐芯片本振频率的设定,输出DAC信号完成对调谐芯片增益的设定,利用ADC采集信标信号用于计算频偏重设调谐芯片本振,输出高低电平完成对低通滤波器截止频率的设定和多路复用器通道的选择,利用ADC完成信号强度的采集。
调谐芯片:LW1003P,该芯片为美国Maxim公司生产的完备的直接变频调谐器,该芯片集成了低噪声功率放大器、射频可变增益放大器、可编程的7阶巴特沃斯滤波器等,能够提供大于80 dB的增益控制范围。
低通滤波器:LTC6603,该芯片为美国凌力尔特公司生产的一款低通滤波器芯片,可编程带宽25 kHz~2.5 MHz,内含4阶编程增益,可对选择的信号进行再放大,本系统中该芯片主要用来滤除高频信号,通过窄带的信标信号用于卫星识别。
对数放大器:AD8310,该芯片是一个高速电压输出、解调频率范围为DC~440 MHz的对数放大器,内含6个串联的放大器。
3.2 软件设计
双源卫星检测识别系统的软件主要包括:1) 系统初始化:对使用的主控芯片时钟、端口、UART串口、DAC信号输出进行初始化,根据目标卫星的信标信号频率设置调谐芯片的本振;2) I2C总线:主控芯片通过I2C总线实时设定调谐芯片的本振和增益,读取调谐芯片的工作状态;3) 带宽选择:通过输出高低电平控制低通滤波器的截止频率;4) 通道选择:根据实际工作状态,主控CPU通过输出高低电平完成I/Q通道的选择;5) ADC采集:此处ADC采集低通滤波器后的信号,用FFT求频偏,根据求取的频偏,重设调谐芯片的本振;6) 信号强度检测RSSI:将经过对数放大器放大后的信号进行ADC数据采集,与所设阈值比较,当此信号大于所设定的阈值时即认为对准目标卫星,同时,输出此信号给测控系统用于微调天线的波束指向。软件设计的整体流程如图5所示。
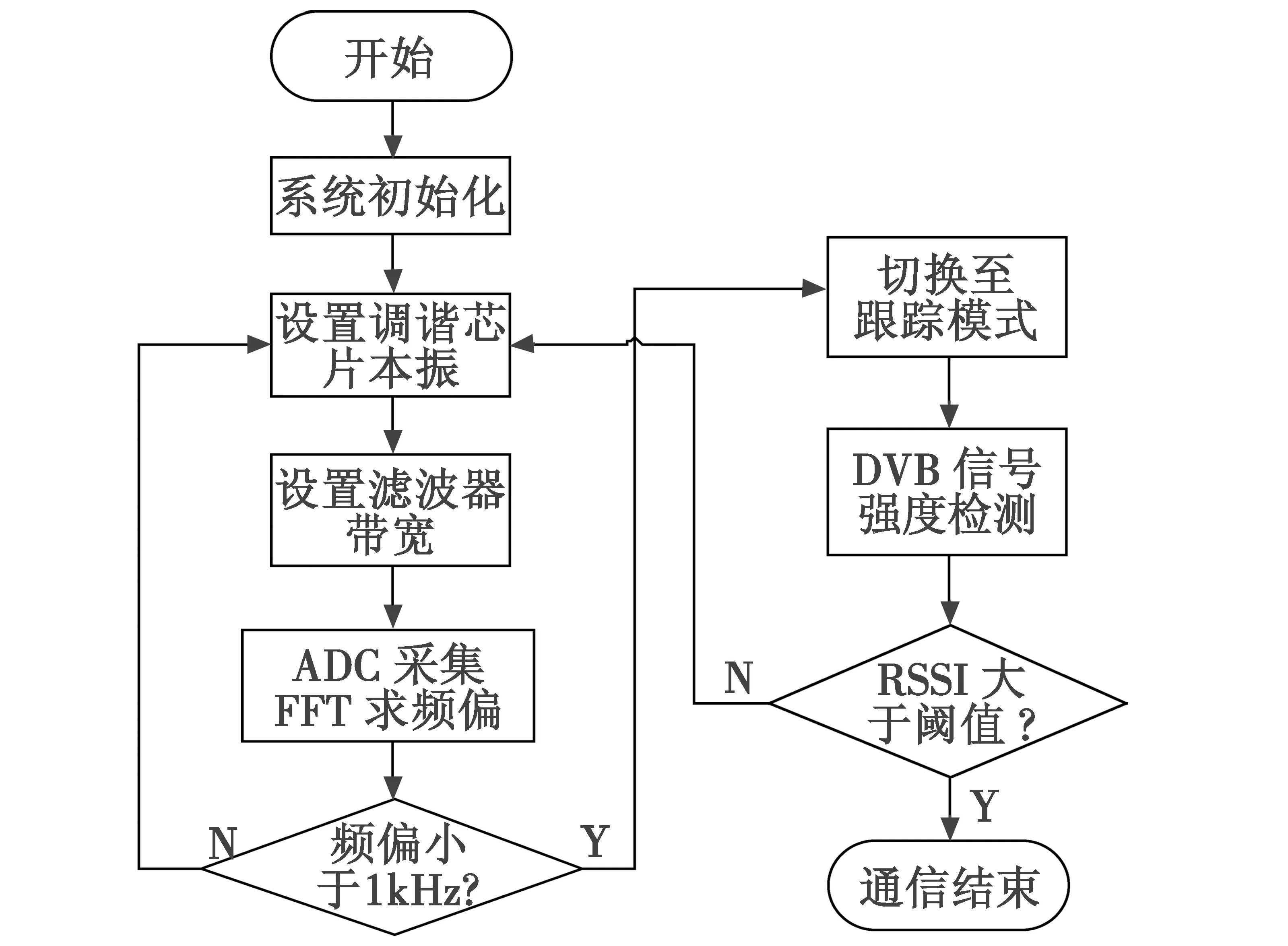
图5 软件设计的整体流程图Fig.5 Flow chart of the software design
4 系统测试
根据所设计的硬件电路,完成了PCB的样机制作,按照系统工作的整体流程,编写控制程序,通过USART串口将程序下载到主控芯片,将样机连接动中通系统,并与电脑相连,通过上位机软件记录采集到的信号强度数据。
实验选取鑫诺五号为目标卫星(水平极化信标频率为12 745 MHz,垂直极化信标频率为12 741 MHz),动中通系统搜索目标卫星过程中,实时采集检测到的信号强度,绘制信号强度变化曲线。
为验证所设计的电路板能否正常工作,将动中通系统的天线进行遮挡实验,观察采集到的信号强度是否发生变化,此时系统工作于跟踪模式,检测卫星电视信号强度,图6分别是在无遮挡、部分遮挡以及完全遮挡条件下采集到的信号强度变化。
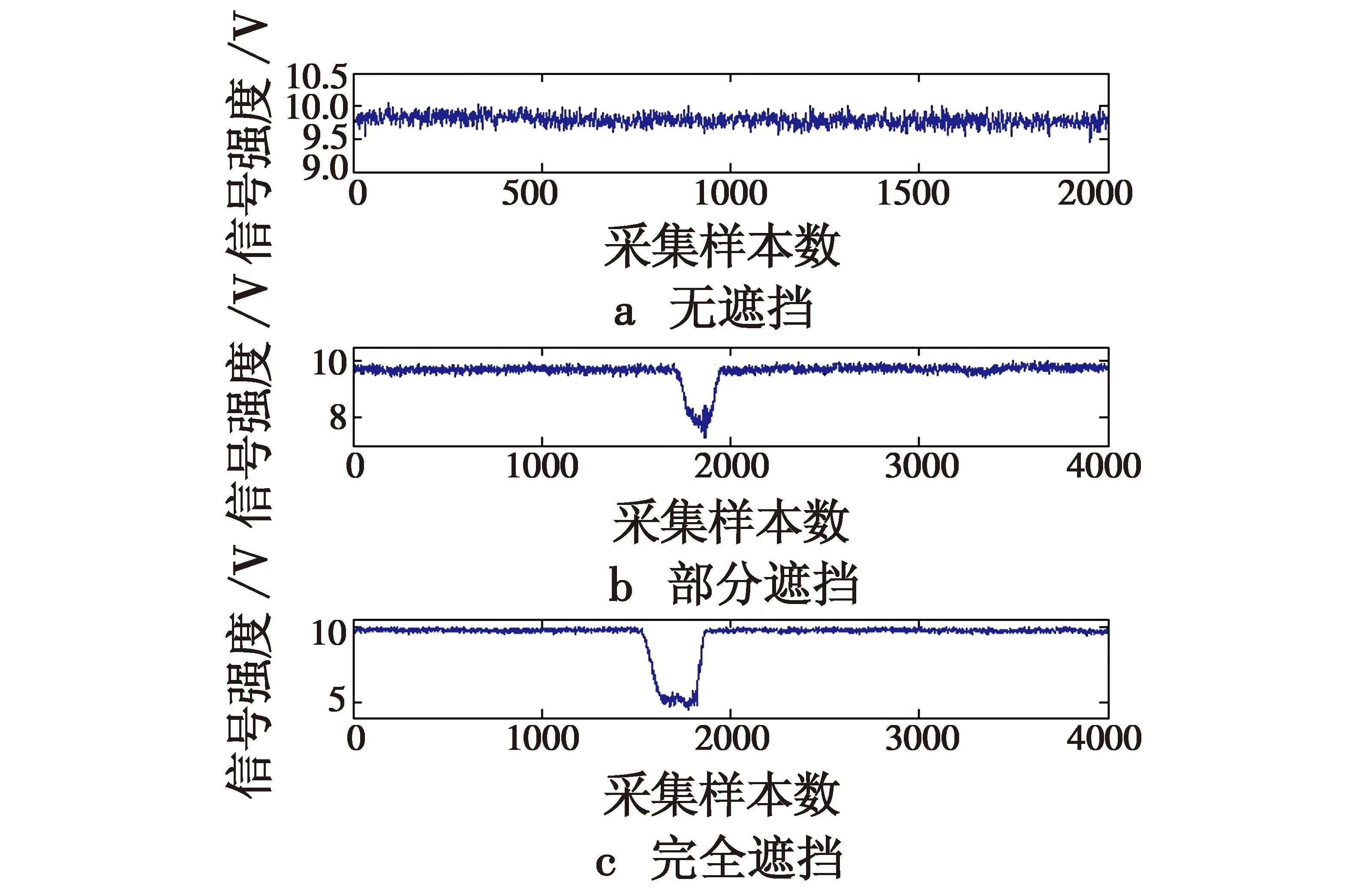
图6 遮挡测试Fig.6 Sheltering test
由图6可以发现:当系统无遮挡时,检测到的卫星信号强度较大,且基本保持恒定;当天线被部分遮挡时,信号强度波动变化;当遮挡移去后,信号强度又恢复到之前的较大值;当动中通被完全遮挡时,信号强度曲线迅速下降,说明系统对卫星信号强度变化敏感。该系统能够用于检测卫星信号强度的变化,输出信号强度指示给识别跟踪系统的下级子系统。
图7是系统检测信标识别卫星的过程,即信标信号强度的变化图。
图7中的几个峰值变化是动中通根据系统的程序设定完成搜索卫星并锁定的过程,第1个峰值是动中通设备搜索到目标卫星;第2,3,4个波峰代表动中通设备调整天线方位角,使天线在方位上对准信号强度最大的方向,即在方位上对准卫星;第5个波峰是动中通设备调整天线俯仰使天线在俯仰上对准卫星,信号强度值趋于稳定,最终系统锁定目标卫星。
5 结束语
本文研究了目前动中通识别跟踪系统的实现方案,根据动中通系统实际工作场景,提出了双源卫星识别跟踪系统的设计方案,利用信标信号频带窄、强度弱,而卫星电视信号频带宽、强度强的特点,用卫星信标信号识别卫星,用卫星电视信号跟踪卫星,完成了系统的软硬件设计和系统功能测试,解决了当前动中通卫星信号识别跟踪系统通用性差、设计复杂的问题。该方案设计简单,易于实现,可快速响应卫星信号强度的变化,指示测控系统调整天线波束指向,能够保证通信链路实时畅通。
