基于GNSS双差定姿的区间列车轨道占用判别方法研究
2018-12-13陈光武刘射德
王 迪, 陈光武, 刘射德, 杨 扬
(1. 兰州交通大学 自动控制研究所,甘肃 兰州 730070; 2. 甘肃省高原交通信息工程及控制重点实验室, 甘肃 兰州 730070)
列车定位作为列车运行控制的基础,CTCS-4级列控系统要求列车自主获取定位位置信息,减少传统的轨旁设备,以提高铁路运输效率并减少建设维护成本[1]。为实现列车在区间的安全行驶、准确生成行车许可,列车运行控制系统需要准确地获取列车位置信息并确定在轨道中的占用情况。这给列车定位精度提出了更高的要求,准确的轨道占用判别能够帮助列车确定目前所在股道及位置,从而实现列车在车站进行越行、交会或调车作业。因此高精度、可靠的轨道占用判别技术对列车运行控制系统起着至关重要的作用。
近年来随着我国北斗卫星导航事业的快速发展,继美国的GPS、俄罗斯的GLONASS和欧洲的ALILEO之后我国也成为拥有卫星导航定位系统的国家。如今随着北斗系统的加入,全球导航卫星系统GNSS(Globe Navigation Satellites System)已经应用到各种领域,尤其是铁路领域,这对列车的传统发展产生了巨大的影响。由于卫星定位存在信号盲区以及偏差,为实现采用GNSS进行轨道占用判别,可以通过联锁信息辅助的方法,其中GE的增强型列控系统和ALSTOM的ATLAS-400都是通过道岔的定位、反位以及列车当前进路状态进行轨道的占用判别[2-3]。另外,可通过加速度计和陀螺仪对列车的动力学状态测量来辅助GNSS实现对区间列车的轨道占用判别[4]。但以上方法仍依赖一定的轨旁设备,增加了运营和维护成本,采用陀螺仪在高纬度地区无法保证航向精度,低纬度情况下无法正常转入导航,数据不能满足航向修正需求[5]。考虑以上方面,本文提出基于GNSS双差定姿的区间列车轨道占用判别方法。通过双GNSS接收机完成列车的二维姿态测量,为保证测量信息的精度和完好性,提出基于粒子滤波的风险敏感滤波算法,通过引入风险敏感因子解决由于系统的不确定性而导致滤波器鲁棒性差以及发散问题。股道占用判别采用支持向量机分类法通过轨道数据库按照数据位置相似程度组成类别,然后将具体数据正确归入某一轨道数据组,最后验证了方法的可行性。
1 基于GNSS双差定姿的区间列车轨道占用判别系统
基于GNSS双差定姿的列车轨道占用判别系统分为信息采集、定位姿态信息处理、轨道占用判别3部分部分,见图1。
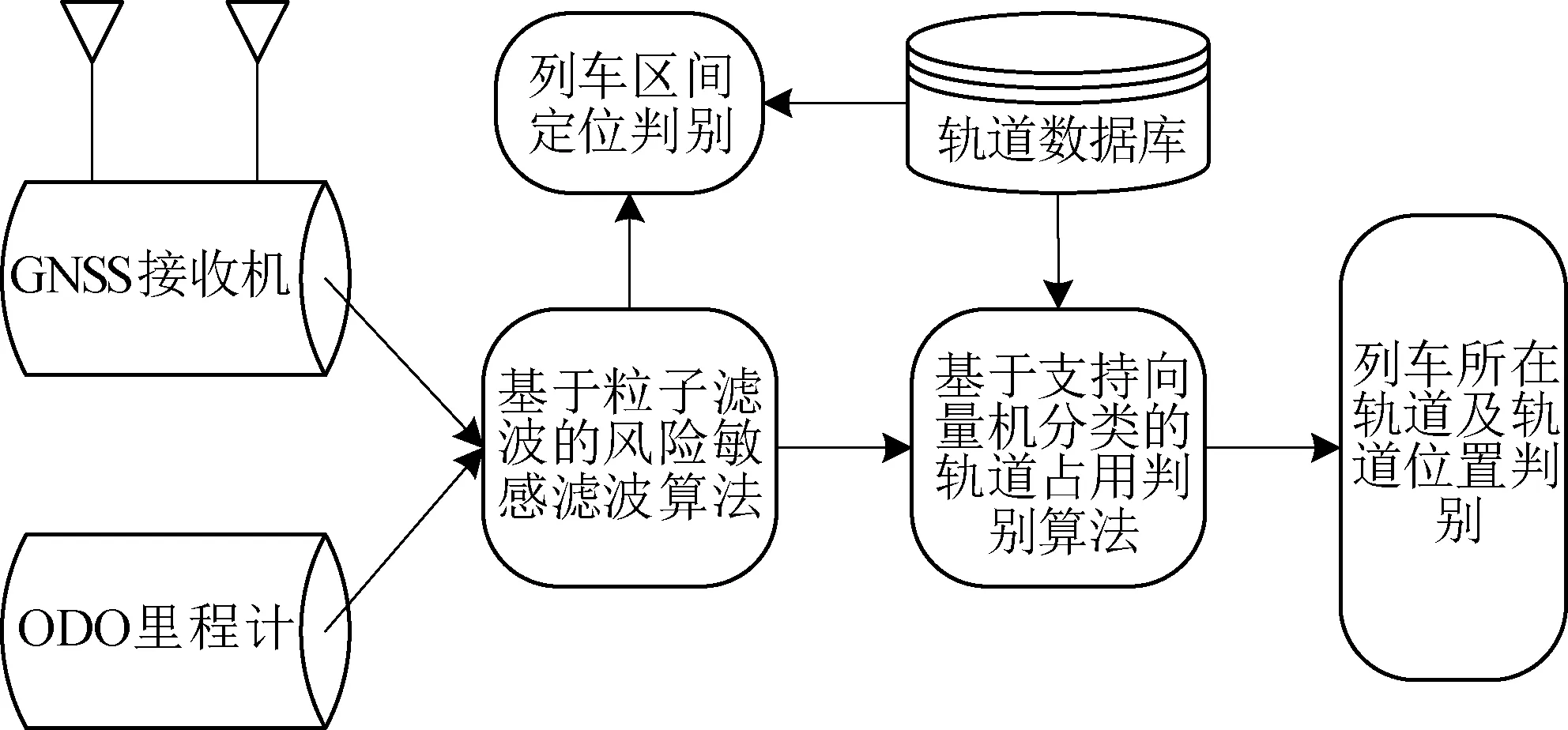
图1 系统结构示意图
其中信息采集部分包括GNSS接收机采集的经纬度、速度、时间和车载ODO里程计的速度信息。定位姿态信息处理部分主要采用算法完成信息的预处理,以及列车区间定位判别。轨道占用判别部分主要通过算法及轨道数据库完成列车所在轨道及位置的判别。
2 列车GNSS双差定姿数学模型
2.1 GNSS双差定姿原理
GNSS双差定姿原理是在运动载体上相距一定的距离分别安装两个卫星信号接收天线。此时,两个天线便能够同时测量多颗卫星的载波相位,通过求差解得天线之间的基线向量,从而获得运动载体的姿态参数[5]。双差定姿原理是由传统单差变换得到,双差示意见图2。
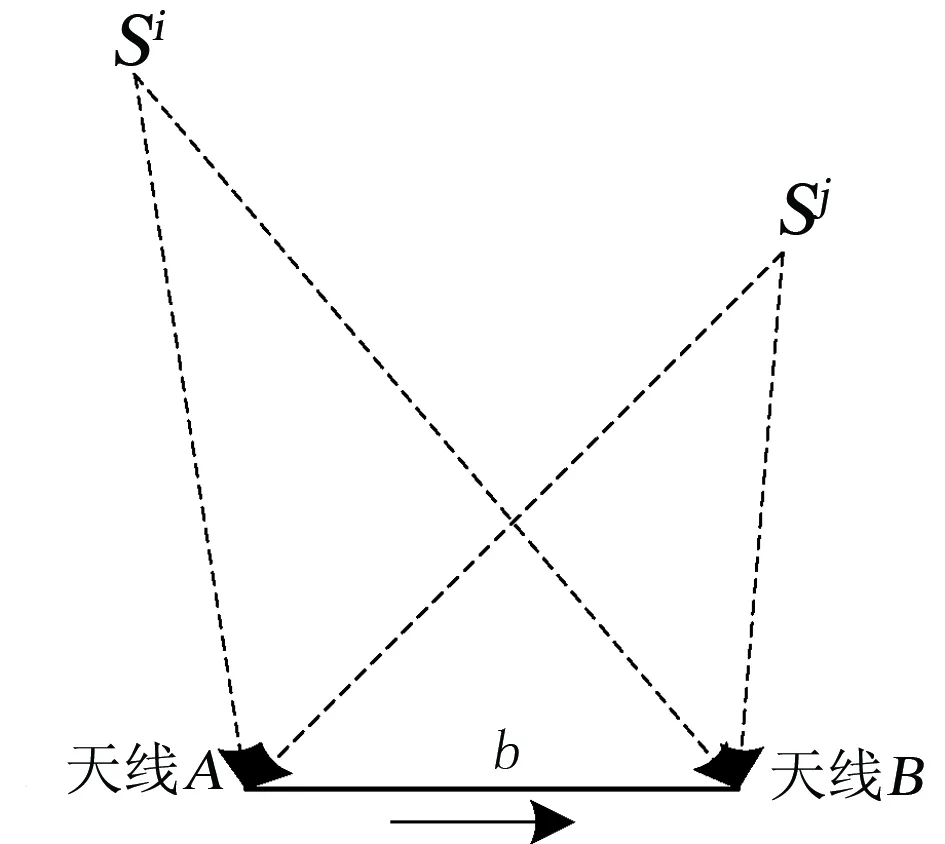
图2 双差示意图
由于AB为载体上两个GNSS天线之间的距离,因此其长度远小于观测卫星与载体之间的距离,此时,把卫星信号可看作平面波。假设A和B两个卫星天线同时观测到卫星i和j,则双差相位基线AB的双差载波相位观测方程为
(1)
令
(2)
可得
(3)

令S=Sj,i,根据式(3)得到天线A到天线B的基线向量最小二乘估计为
(4)
采用MLAMBDA方法对整周模糊度进行求解。计算结果采用大地坐标系WGS-84。为方便后续计算,将WGS-84坐标系转换成当地水平坐标系LLS(Local Level System)。此时,运动载体的姿态角就转换为载体坐标系BFS(Body Frame System)相对于当地水平坐标系的位置。
(5)
因此,运动载体的航向角为
(6)
2.2 列车GNSS双差定姿模型
本文将GNSS双差定姿理论引入区间列车轨道占用判别中,通过安装在列车上的两个GNSS天线获取定位信息,通过双差计算得到列车航向角,见图3。其中AB为列车定位基线,其长度为列车车头的长度,因为基线越长其航向角误差越小,对于列车其最长基线即为机车长度[6]。列车的运动可以看作平面中的二维运动,因此只需要确定其航向角即可。
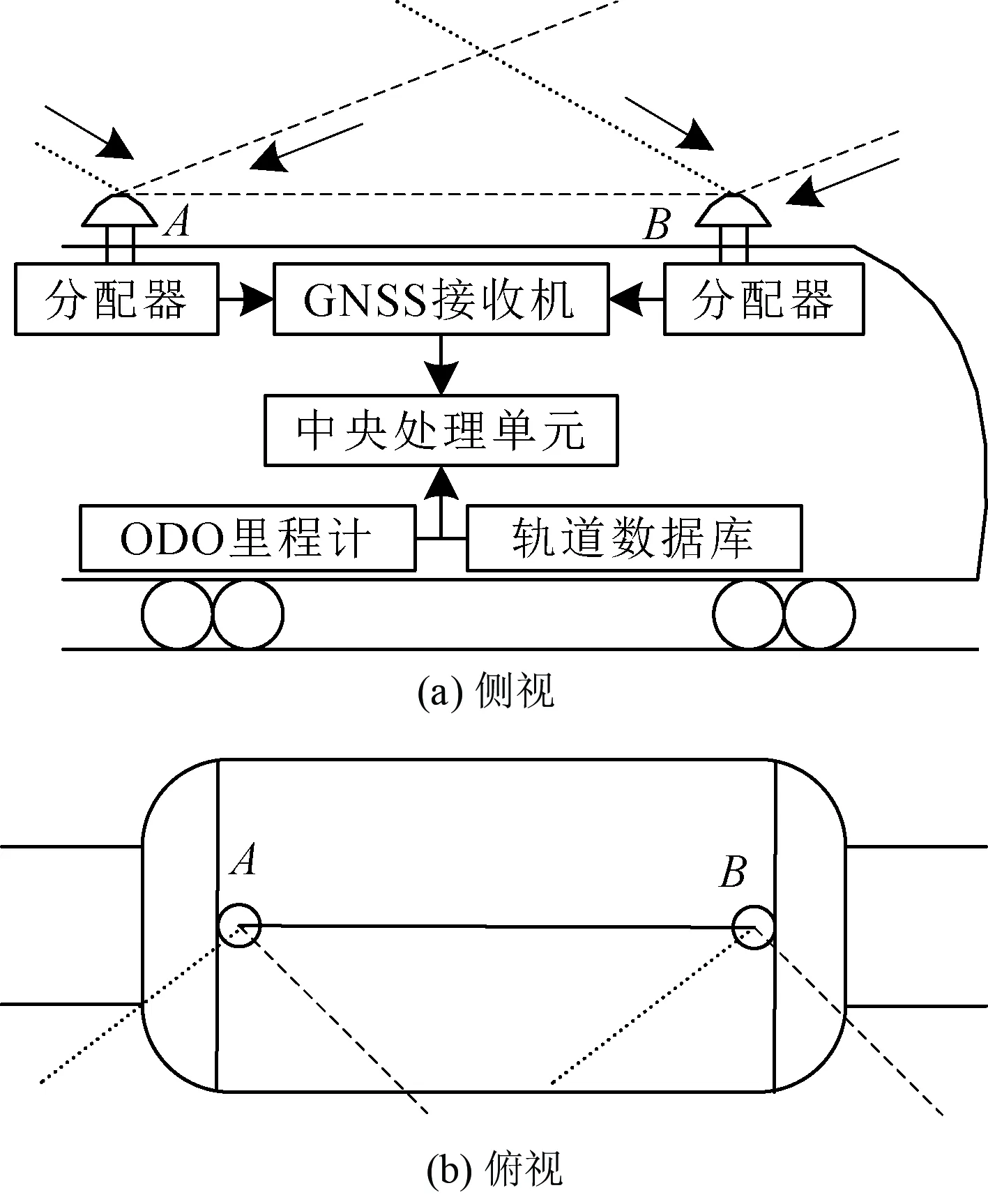
图3 列车GNSS双差定位示意
3 列车轨道占用判别方法
3.1 姿态信息处理算法
虽然通过双差定姿能够获取列车航向角信息,但由于GNSS定位存在一定的误差,因此需要对数据进一步处理。其中文献[7]将GNSS接收机GG-24设置在RTK方式下,采集了列车经过道岔时的航向角信息,数据误差的变化曲线见图4。
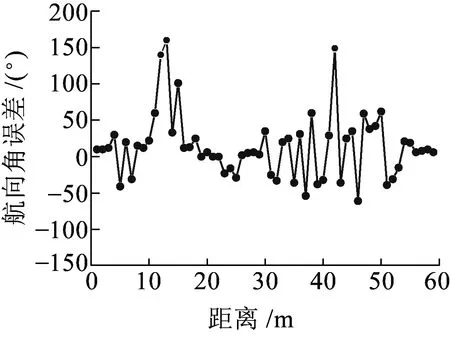
图4 列车经过道岔的航向角误差
由图4可见,卫星定位系统输出的航向角信息在慢速时存在较大偏差(列车经过道岔时会降低速度),因此对于判断列车的方向也会受到一定影响[7]。针对以上问题,本文提出基于粒子滤波的风险敏感滤波算法,设状态空间模型为
(7)
式中:xn为n时刻m维线性状态列向量;yn为n时刻的观测值;h(xn)为关于xn的任意非线性函数;A为已知状态的转移矩阵;un、vn为均值为零的高斯分布状态噪声和观测噪声[8]。
(8)
式中:i=1,…,N。
首先采样得到粒子,即在先验概率分布p(x0)上做采样处理。随后通过概率分布
(9)
得到粒子更新,其中状态噪声服从高斯分布,由式(8)得到粒子重要性权重为
(10)
经过归一化后
(11)
经过重采样后,得到状态xn的最小均方估计为
(12)
当粒子滤波受观测噪声较大影响时,不能准确描述后验概率,粒子滤波的估计性能会受到严重影响。
由于对状态xn的顺序估计满足
(13)
(14)

frs,n(xn)=
(15)
式中:μ1≥0,μ2≥0为风险敏感参数;函数ρ1(·)和ρ2(·)为严格凸的连续函数[9]。
最小风险敏感估计为
(16)

(17)
式中:X、Y为随机变量是概率论中特有的变量;x、y为函数自变量。根据以上假设有
σn|n-1(xn)dxn
(18)
(19)
3.2 轨道占用判别算法
支持向量机SVM(Support Vector Machine)是Vapnik[10-11]根据统计学习理论提出的用于解决小样本模式识别问题的方法。支持向量机分类器构造的基本思路是:寻求一个超平面(决策函数),以决策平面为基准获得最大的正负类样本点间隔,在线性可分和不可分的情况下,转换为二次规划问题,最后采用拉格朗日乘子法求得唯一的极值点。
本文通过列车经过不同道岔时航向角的变化将采集到的信息进行分类,求出道岔之间航向角信息的超平面(决策函数),然后通过轨道数据库中道岔角度信息进行匹配,以得到列车所在轨道的占用情况。列车经过道岔时的角度变化情况见图5。
由图5可见,列车在经过道岔时航向角为线性变化,因此支持向量机采用线性分类法。获取列车航向角样本集为
{(xi,yi),i=1,2,K,l}xi∈Rdyi∈R
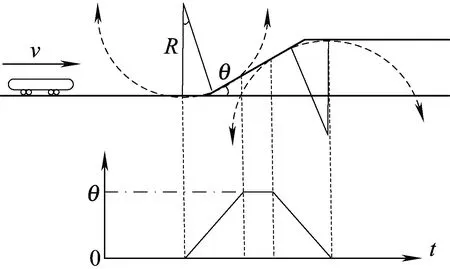
图5 列车以恒定速度进入道岔时的角度变化曲线
他们是从某一确定函数(未知概率分布)F(x,y)中随机独立抽取的。同时为了使样本能够获得正确的分类,还需满足一定的约束条件
yi(w·xi+b)-1≥0
(20)
式中:b为误差偏值;xi为样本输入值;w为可调权值函数。
线性最优分类图见图6,其中H为分类线;H1、H2分别表示离分类线最近的各类样本,其满足条件:H1和H2均平行于分类线H, 他们之间的距离为分类间隔。
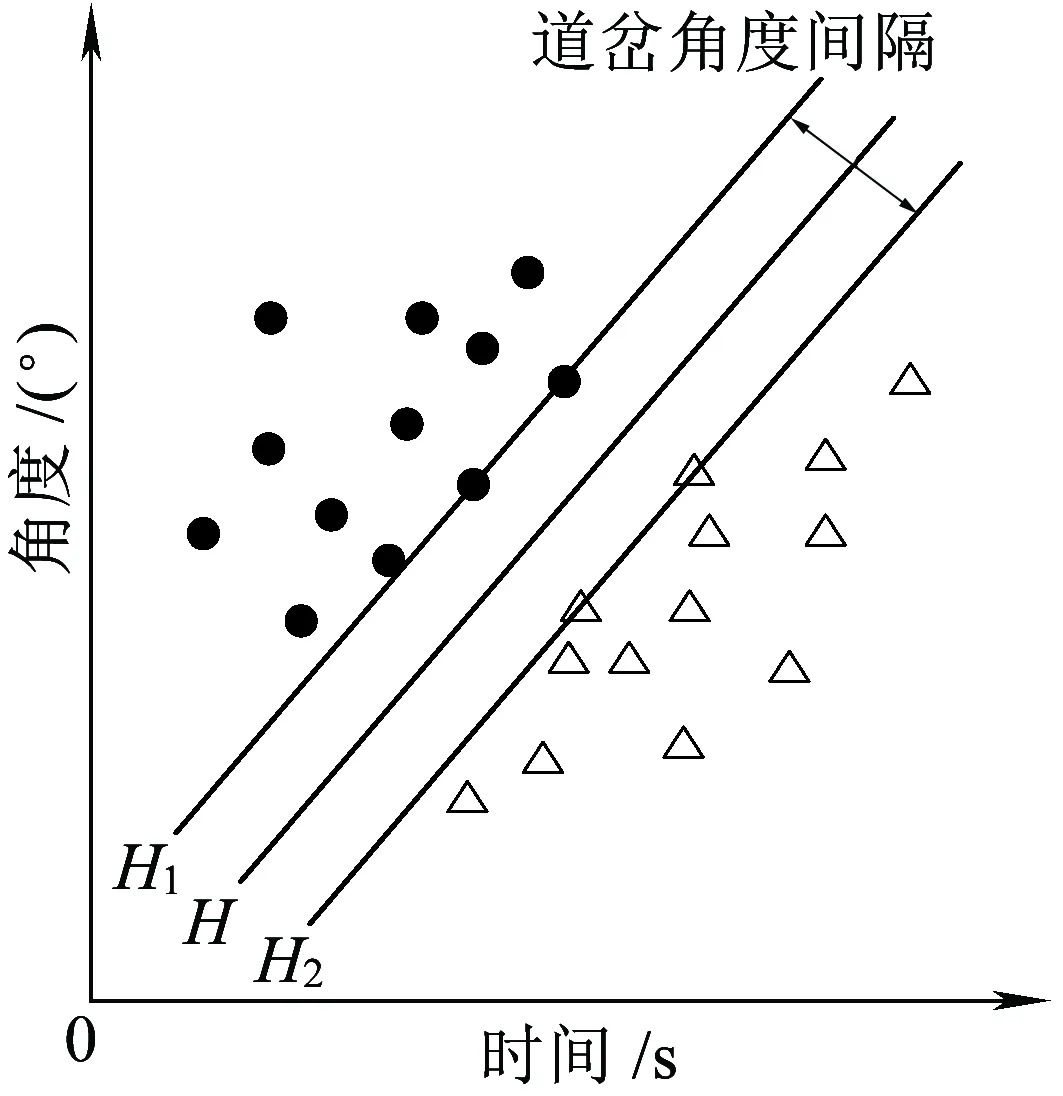
图6 线性最优分类
在线性可分的条件下,得出分类间隔为
(21)
把求解最优超平面表示成如下约束问题,在约束条件(20)下,最小化函数为[12]
(22)
采用拉格朗日乘子法解算最优化问题。建立拉格朗日函数为
L(w,b,α)=
(23)
式中:变量αi为拉格朗日乘子且满足条件αi≥0。拉格朗日函数L(w,b,α)的鞍点决定了约束最优化问题的解,通过对w和b求偏导并置结果等于零,通过以下两个条件
(24)
将上述问题转换为一个“对偶”问题。即
(25)
这是一个不等式约束二次函数极值问题,根据KKT(Karush-Kuhn-Tucker)条件,该问题满足[13]
αi{[(w·xi)+b]yi-1}=0
(26)
可见对于大多样本αi值为0,其中不为0的αi对应使式(20)中等号成立的样本,即支持向量。求解上述问题后得到的最优分类函数为
(27)
通过以上分析,区间轨道占用判别流程见图7。
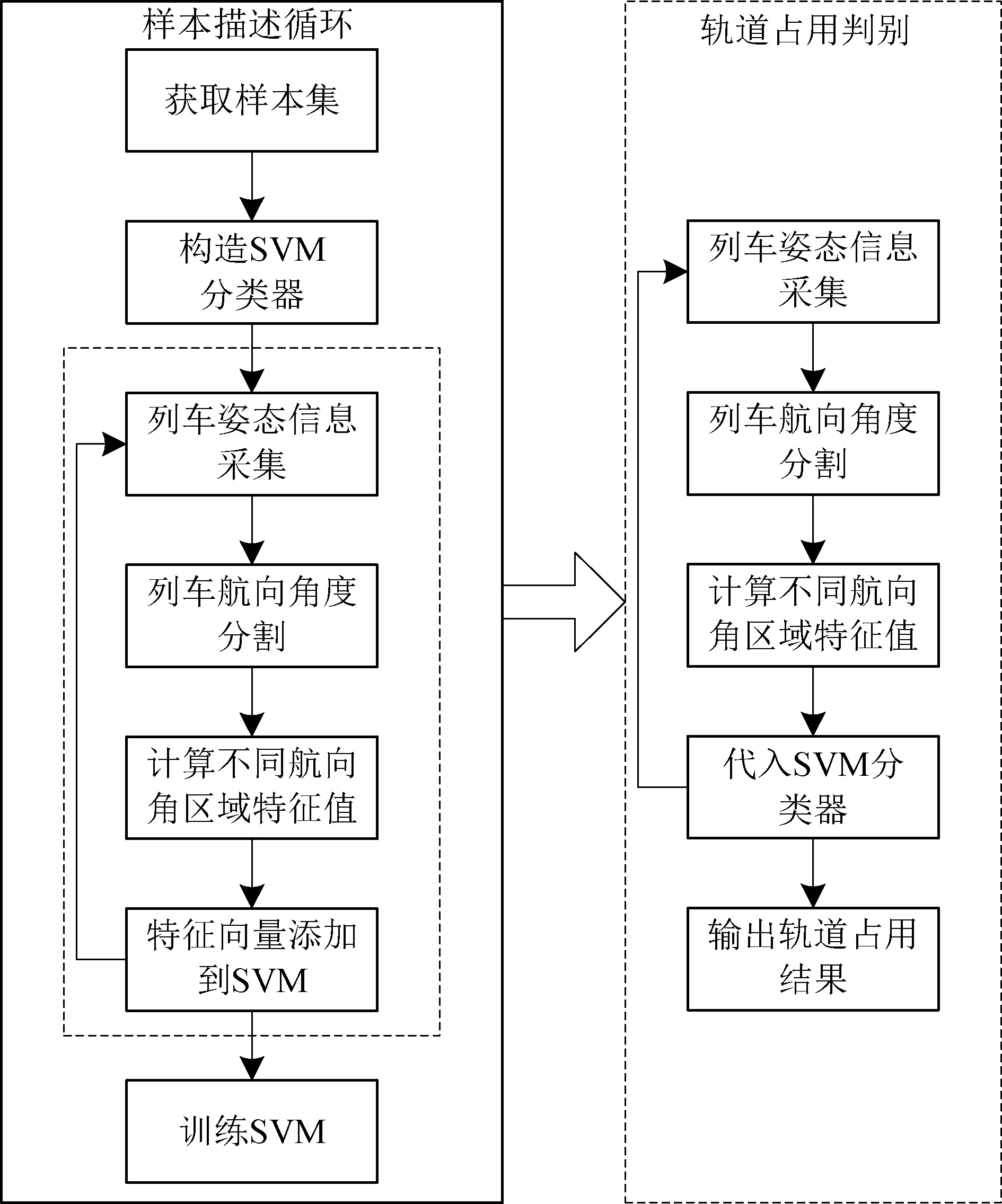
图7 基于SVM分类的轨道占用判别流程
4 算法验证与分析
结合长沙磁悬浮列车现场测试数据进行分析,利用里程计、惯性测量单元、GNSS接收机所采集到的数据进行MATLAB处理,验证本文提出的基于粒子滤波的敏感风险因子滤波算法的优越性以及轨道占用判别方法的有效性。
4.1 测试参数及环境
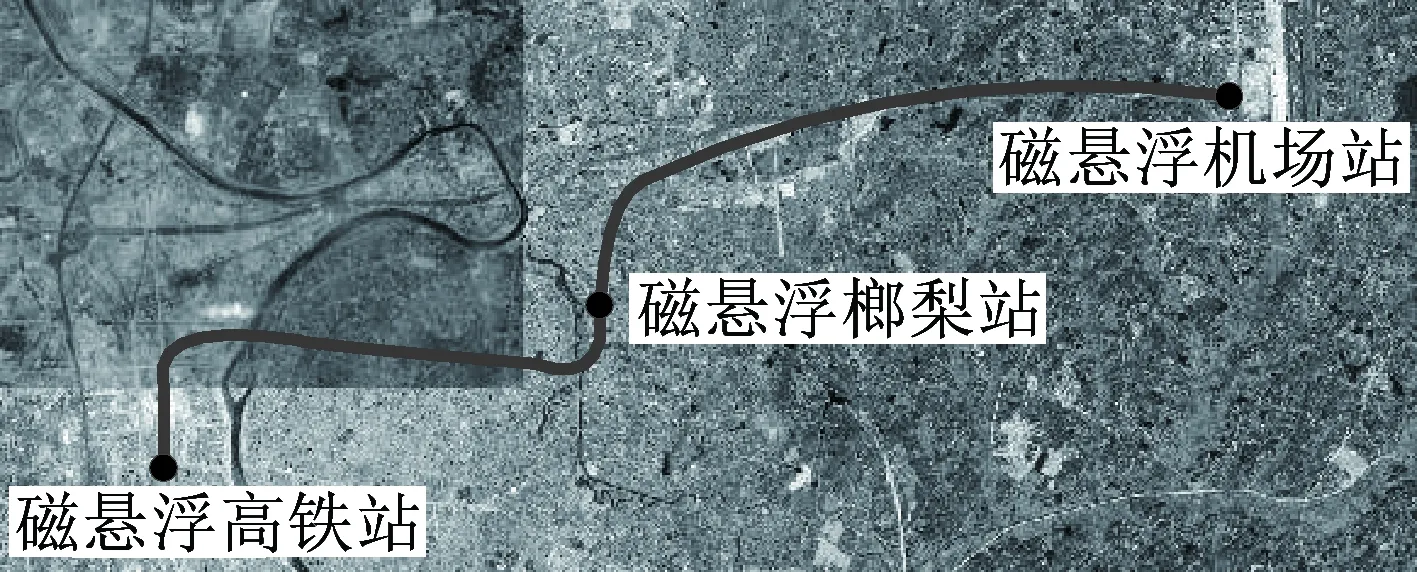
测试硬件部分主要采用K700卫星定位板卡。K700为3系统单频OEM板卡,支持BDS B1、GPS L1、GLONASS L1 共3个系统,支持SBAS系统,输出频率为10 Hz。惯性测量单元采用6轴的MUPU6050,采样频率100 kHz,启动时间400 ms。硬件设备现场测试见图8(a)。测试路线为长沙磁悬浮线路,磁悬浮高铁站到磁悬浮机场站线路全长18.55 km,见图8(b)。本文选取部分测试数据进行处理分析。

(a) 硬件设备测试
(b) 测试路线图图8 现场测试
4.2 GNSS双差定姿滤波算法验证
选取部分测试数据进行处理,测试路段的可见卫星数分布见图9。
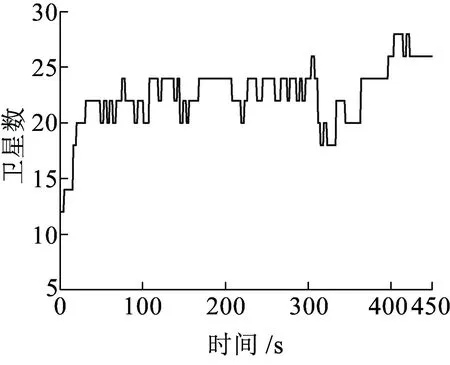
图9 测试路线卫星数分布图
通过MATLAB对安装在机车前后的GNSS卫星接收机采集到的原始数据进行双差计算,得到列车运行的航向角变化曲线见图10。同时采用本文提出的基于粒子滤波的风险敏感滤波算法对双差结果进行滤波处理,滤波前后的航向角变化值见图11。可见在经过道岔时GNSS双差计算存在较大波动,而本文提出的滤波算法对解决非线性定姿系统存在较大初始误差的滤波问题取得了较好的效果。
为进一步说明该算法的优越性,通过与基站的绝对坐标对比获得数据的误差分布,采样的频率次数与误差分布的直方图,见图12(a)。其误差达到±7 m,其中两端误差为±7 m的范围存在次数较多,发散性强且鲁棒性差。
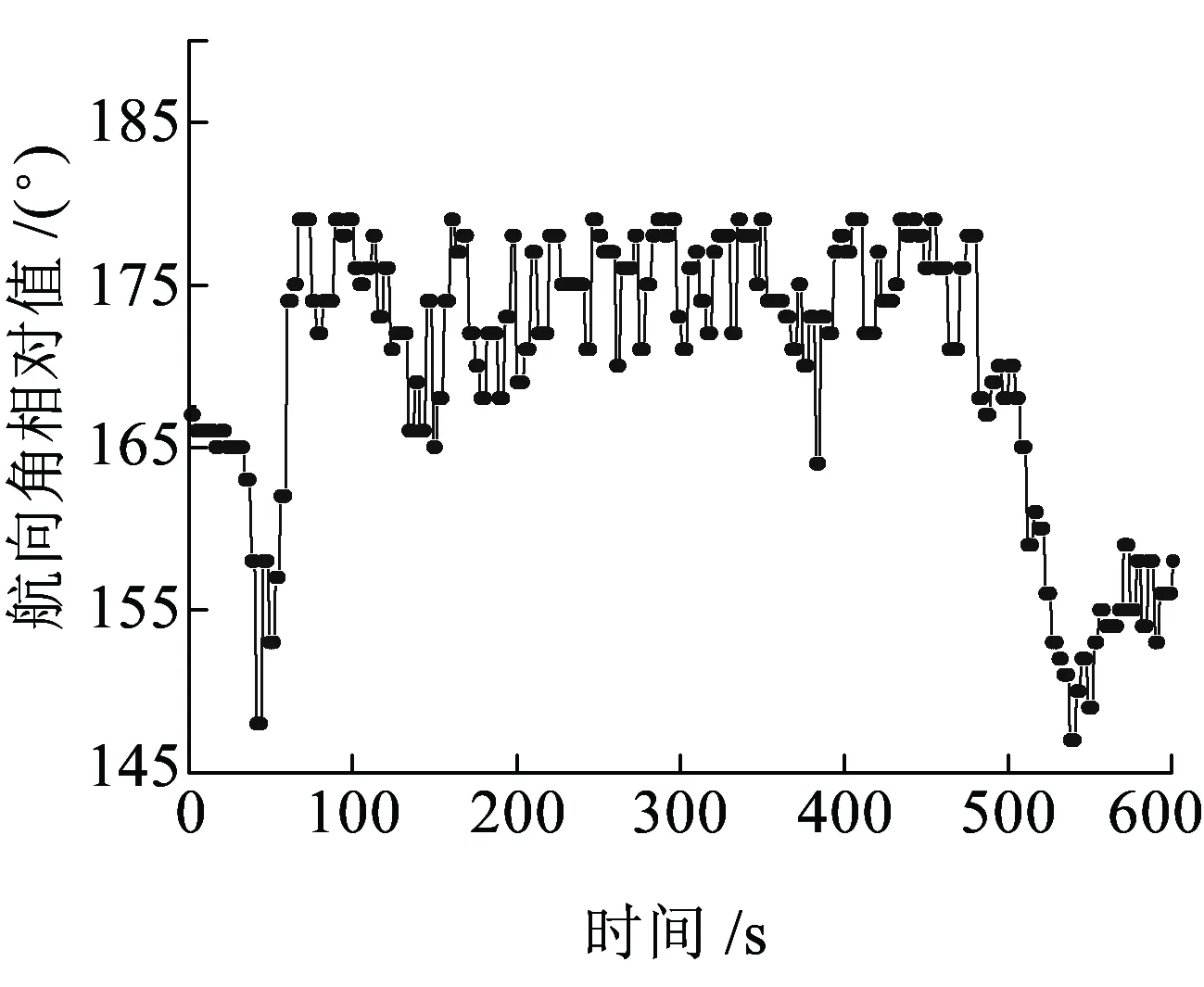
图10 列车GNSS双差测量航向角
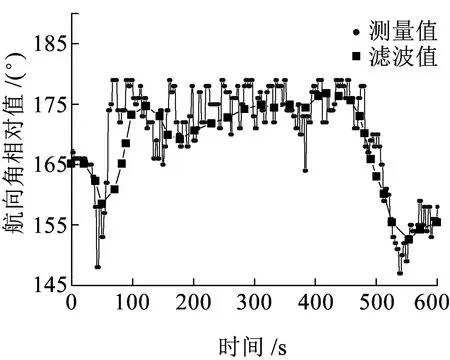
图11 滤波结果与原始测量值比较
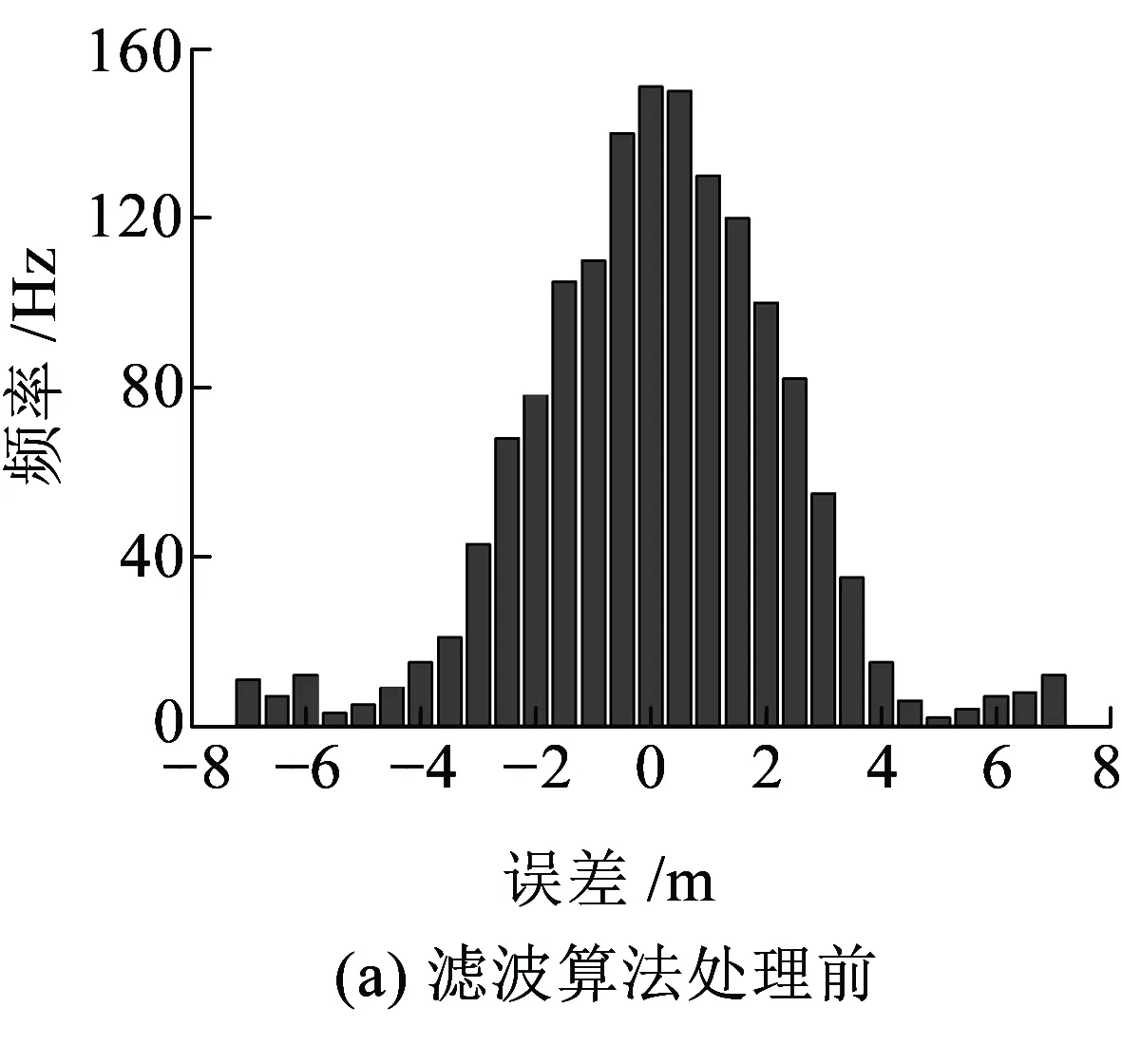
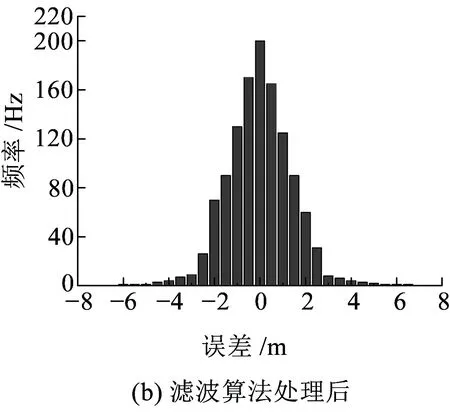
图12 滤波算法处理前后的GNSS定位误差分布
经过基于粒子滤波的风险敏感滤波算法处理后的GNSS定位数据误差分布,见图12(b)。一般铁路区间平行股道中心距离为5 m,列车GNSS定位横向误差满足零均值的高斯白噪声。0.999 99的置信度要求转换为定位精度为4.3倍标准差(4.3σ),则定位精度即为[14-15]
4.3σ=4.3×0.58=2.494
(28)
根据图12中的数据可知,在精度为2.494 m范围内的概率分别为93.23%和99.5%,在支持向量机分类辅助下能够满足平行股道占用判别。
4.2 列车轨道占用判别仿真分析
通过MATLAB编写相关分类算法程序。为说明实验结果,此处定义轨道占用判决正确率为
(29)
式中:N为误判类别总数;T为每种误判类别的样本数;S为正确判决的样本总数。
4种状态下的判决分类结果,见表1。
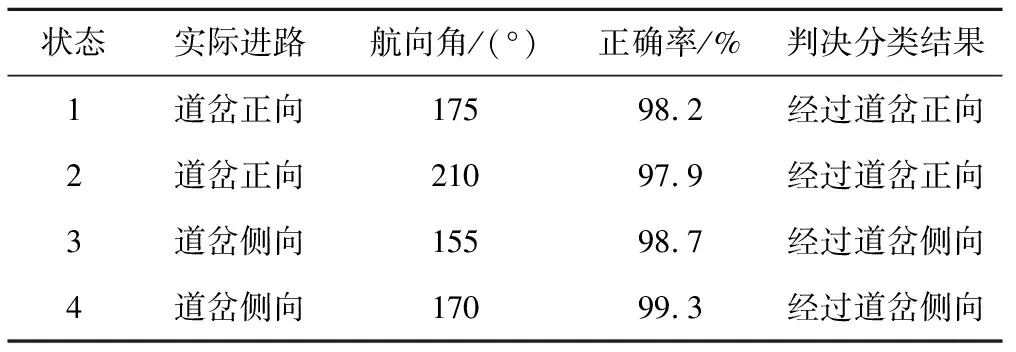
表1 列车轨道占用判决分类结果
4.3 卫星数及HDOP值对轨道占用识别的影响
可见卫星数及水平(平面)位置精度因子HDOP值对基于GNSS双差定姿的列车轨道占用判别具有重要的影响,为提高轨道占用判别的完好性和可靠性,必须对数据的有效性进行分析。研究表明,当可用卫星数在6颗以上、HDOP值低于1.5时才能满足轨道占用判别要求[16]。通过现场采集提取相关数据绘制成,见图13。
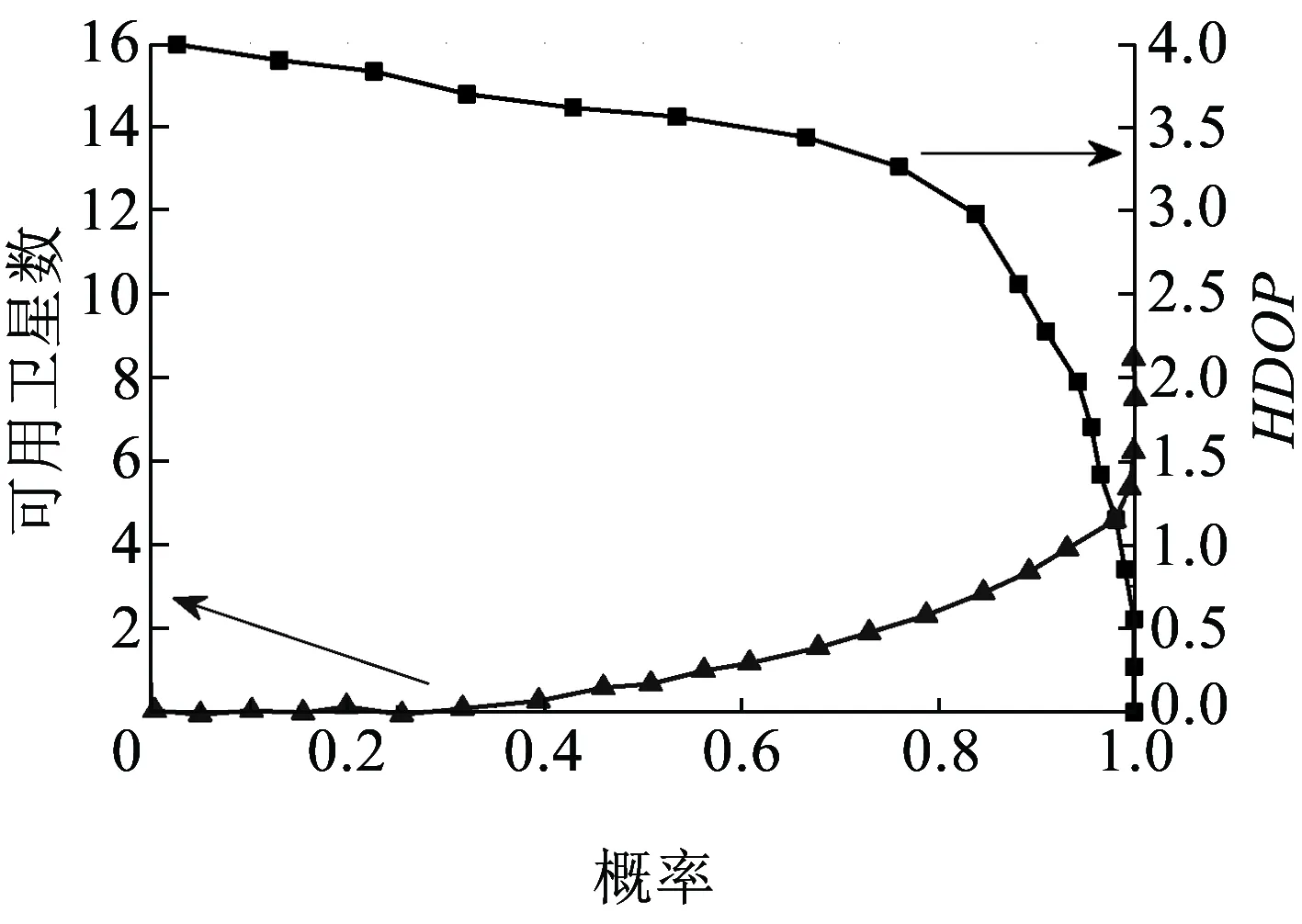
图13 卫星数及HDOP值与轨道占用概率的关系
由图13可以看出,当可用卫星数在5颗及以上时、当HDOP低于2.0时其轨道占用判别概率能够达到95%以上,从而优于传统测试参数,为未来卫星导航定位技术在列车中的应用提供一定的参考价值。
5 结束语
针对区间列车轨道占用判别问题,提出基于GNSS双差定姿的轨道占用判别方法。通过引入风险敏感因子,提出一种基于粒子滤波的风险敏感滤波算法,有效地解决了由于系统的不确定性而导致滤波器鲁棒性差以及发散的问题。对于轨道判别方面,采用一种支持向量机的分类算法。经过数据分析与仿真,该方法能够基本完成列车轨道占用判别,下一步的工作是对该方法进行完善。
