前视阵FDA-MIMO雷达距离模糊杂波抑制方法
2018-12-10徐义正廖桂生许京伟王成浩
徐义正,廖桂生,许京伟,王成浩
(西安电子科技大学雷达信号处理国家重点实验室,陕西 西安 710071)
0 引 言
高速平台前视阵雷达能够探测淹没于地面强杂波下的微弱慢速运动目标,在机载、弹载雷达中具有重要的应用价值[1]。高速平台前视阵雷达在动目标检测过程中面临强大的杂波干扰,一方面,前视阵雷达杂波具有显著的距离依赖性,近程与远程杂波分布特性差异较大;另一方面,由于平台高速运动导致主杂波严重扩展,雷达需提高脉冲重复频率(pulse repetition frequency,PRF)来降低杂波多普勒模糊,但这将导致杂波发生多重距离模糊。因此,当二者同时存在时,近程杂波与远程杂波相互叠加,雷达杂波抑制性能将严重下降[2-3]。
针对前视阵雷达杂波距离依赖性问题,现有方法包括多普勒补偿法[4]、角度多普勒补偿方法[5]、配准补偿法[6]、空时插值法[7]等通过补偿杂波的距离依赖性,进而采用传统空时自适应处理(space-time adaptive processing,STAP)技术,在空间和时间二维平面上实现杂波抑制和运动目标的检测。但上述补偿方法仅在无距离模糊情况下有效。针对高速平台雷达距离模糊杂波问题,文献[8-9]提出了三维STAP方法实现距离模糊杂波的抑制。然而,三维STAP方法受到训练样本和系统自由度的双重限制而难以在实际情况中应用。直接数据域STAP方法仅利用当前距离门数据,通过空时平滑获得训练样本,不受距离依赖性及距离模糊的限制[10-12],但直接数据域STAP方法运算量过大,且空时平滑操作将会牺牲系统自由度及目标检测性能。
近年来,多输入多输出(multiple input multiple output,MIMO)雷达通过充分利用发射分集的优势[13],能够有效提高系统自由度及灵活性,在提高雷达杂波及干扰抑制性能、目标参数估计精度、目标辨识能力等方面展示了巨大的潜力。文献[14-15]提出了频率分集阵列(frequency diverse array,FDA)的概念。不同于传统相控阵,FDA雷达通过在阵元之间引入微小的载频偏移,等效地在发射端引入了随时间变化的发射权值,能够形成角度、距离、时间依赖的发射方向图。文献[16]提出了一种利用FDA雷达距离角度依赖的方向图来改善距离模糊的STAP算法,其利用发射方向图的距离维零点来抑制距离模糊的近程旁瓣杂波。文献[17]建立了FDA-MIMO雷达基本框架,提出了目标无模糊的参数估计方法。文献[18-19]开展了机载FDA-MIMO雷达杂波抑制方法研究。文献[19]建立了正侧视阵列配置下的FDA-MIMO信号模型,提出了正侧视阵列在距离模糊情况下的目标检测方法。文献[20]综述了FDA-MIMO雷达的技术特点。本文基于FDA-MIMO雷达体制,进一步考虑前视阵应用背景,提出了利用FDA-MIMO雷达发射端距离维可控自由度结合空间-时间维自由度,将距离模糊的杂波在发射角-接收角-多普勒联合域有效分离,再补偿由非正侧视阵列导致的杂波距离空变性,随后利用和差波束及邻近多普勒通道进行降维,降低对独立同分布样本数的要求,进而实现对距离模糊杂波的抑制。仿真实验验证了本文方法的有效性。
1 前视阵FDA-MIMO雷达几何构型


图1 机载前视FDA-MIMO雷达几何构型Fig.1 Airborne forward-looking FDA-MIMO radar geometry
考虑各发射天线的载频为线性步进,则第m个阵元发射信号的载频可表示为
fm=f0+(m-1)Δf
(1)
式中,f0=f1为参考阵元的载频;Δf为频率步进量。注意该频率步进量通常远小于参考频率和发射信号带宽。第m个阵元的发射信号可表示为sm(t)=φm(t)exp{j2πfmt}(0≤t≤Tp,m=1,2,…,M),φm(t)是归一化的信号包络,Tp是脉冲持续时间。假设各发射信号包络相互正交,即
0,1≤m,n≤M,m≠n,∀τ
(2)
式中,上标*表示取共轭;τ为时延。以第一个阵元为参考阵元,第m个阵元发射的脉冲信号经杂波块后向散射后,被第n个阵元接收的信号
相位可表示为
(3)
如式(3)所示,第1项为距离和频率步进量的函数,第2项和第3项与传统MIMO相同,第4项与第5项为二次调制项。当频率增量与载频相比很小时,第4项和第5项可以近似被省略。同样的,当频率步进量相比载频可以忽略时,杂波散射块对应的归一化多普勒频率为fd(βl,p,q)=2vpTcosβl,p,q/λ0,其中λ0=c/f0为参考波长。第n个阵元接收的第k个脉冲的回波信号可表示为M个发射阵元发射信号回波之和为
(4)
式中,τm,n,k为第m个阵元发射的第k个脉冲信号经杂波块后向散射后,被第n个阵元接收的时间延迟。将该回波信号经过M个匹配滤波器,在各滤波器的输出端可得到不同发射阵元的回波信号,其中第m个匹配滤波器为φm(t)·exp{j2πfmt}。则由式(2)和式(3)可得,第m个阵元在第k个脉冲发射的信号,经杂波块反射后由第n个阵元接收到的信号可表示为
xm,n,k≈ξl,p,qexp(-j[4π(m-1)ΔfRl,p/c-
exp(j[2vpT(k-1)cos(βl,p,q)/λ0])
(5)
式中,ξl,p,q是杂波块的散射系数。
因此,在发射-接收-时间三维空间中的信号快拍可用矢量表示为
(6)
(7)
(8)
d(fd(βl,p,q))=[1,exp{j2πfd(βl,p,q)},…,
exp{j2πfd(βl,p,q)(K-1)}]T
(9)
由于第l个距离门的回波信号为该距离处不同方位杂波块及各次距离模糊区域的杂波块的回波信号的叠加,因此,第l个距离门的杂波信号可表示为
(10)
式中,Np是最大距离模糊次数;Nc为每个距离环内统计独立的散射块个数。第l个距离门包含目标、杂波、噪声的总回波信号为
xl=sl+cl+nl
(11)
式中,sl为目标矢量;cl为杂波矢量;nl为高斯白噪声矢量。这里假设目标信号、杂波和噪声相互独立。
2 距离模糊杂波抑制方法
2.1 杂波距离依赖性补偿技术


(12)
其中第l个距离门第p次距离模糊处的真实距离为Rl,p=Rl+(p-1)Ru,Ru为最大不模糊距离。由式(12)可见,补偿后的发射空间频率与距离区域的索引号p有关,而与主值距离Rl无关。另一方面,接收空间频率和多普勒频率保持不变。因此,补偿之后的第l个距离门的杂波回波可以表示为
(13)
补偿之后的发射空间频率和接收空间频率在每一个无模糊距离区域都是线性相关的,二者关系如图2所示(假设距离模糊数为2)。由图2可知,不同距离模糊区域杂波的发射空间频率跟距离模糊次数p有关,再联合接收空间频率从而实现距离模糊杂波的分离。
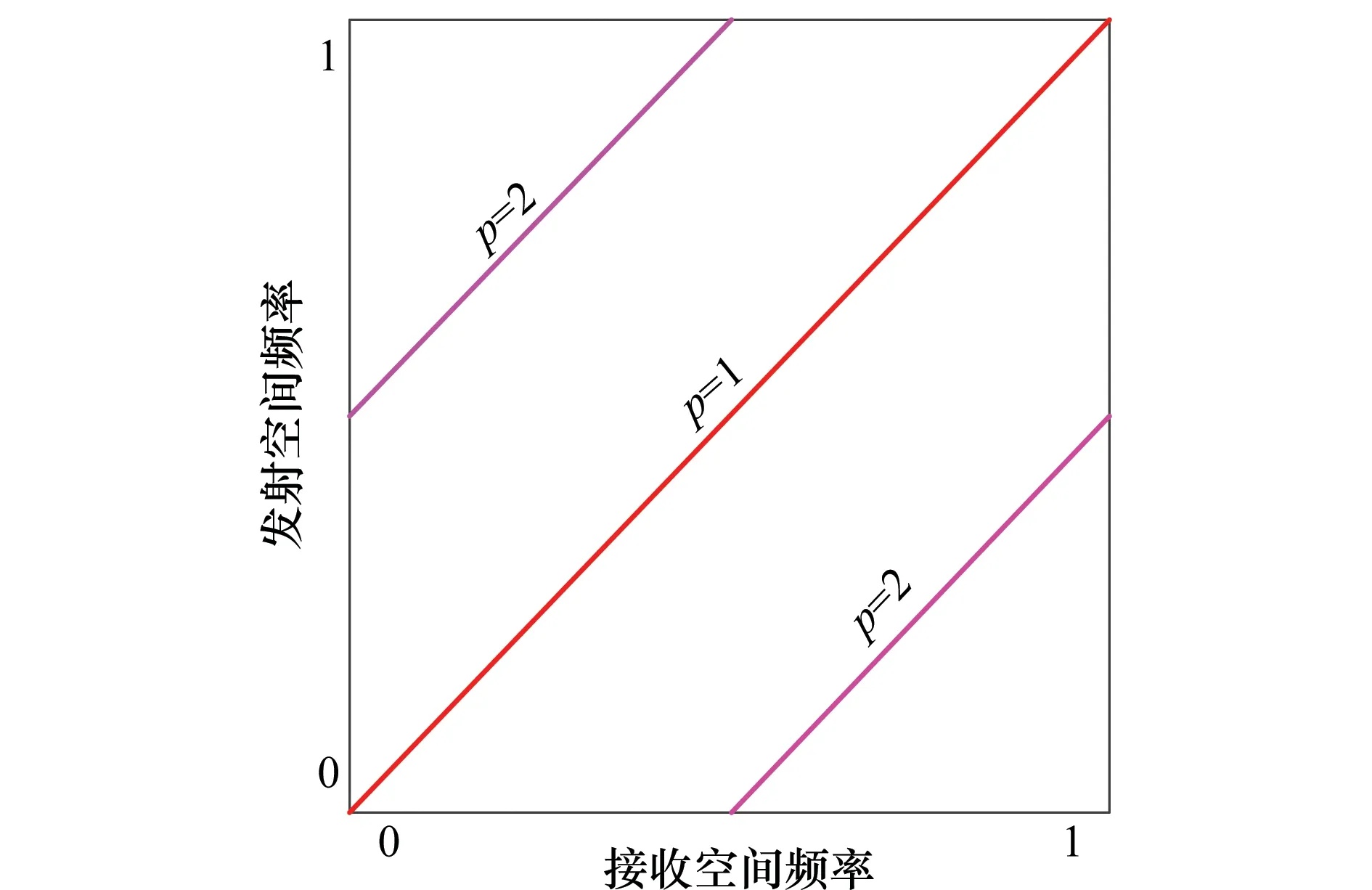
图2 不同模糊距离区域发射空间频率与接收空间频率的耦合关系Fig.2 Coupling curves of transmit and receive spatial frequencies versus index of range ambiguity
距离模糊杂波分离后,需要进-步考虑前视阵几何构型引入的杂波距离空变性。通过对主瓣杂波进行多普勒补偿(Doppler warping,DW),即
(14)

g=1M⊗1N⊗[1,exp(j2π(fd0-fdl)),…,
exp(j2π(fd0-fdl)(K-1))]T
(15)
经过距离依赖补偿和多普勒弯曲补偿之后的主值距离的杂波分布近似满足同分布特性。经过补偿之后,目标的导向矢量为
d(fd(β0,v0))
(16)
2.2 基于和差波束的降维处理方法
全维空时处理需要大量的参考样本来估计杂波协方差矩阵,计算量大,本文提出采用和波束、差波束支路联合多普勒域进行降维处理。和差波束具有旁瓣低、可靠性高的特点,并且基于和差波束可以提高目标参数估计的精度。相比于局域联合处理法(joint domain localized,JDL)、广义相邻多波束(generalized adjacent multiple beam,GMB)等降维处理方法,和差波束具有更少的空间自由度,对独立同分布样本数目的要求更低,并可拓展进行目标参数估计。在发射空间选择和差波束两个空间通道,构造有两个空域自由度的降维矩阵为
(17)
同样的,在接收空间形成有和差波束两个支路的降维矩阵为
(18)
在时域选择3个相邻的多普勒通道,构造降维矩阵
D(β0,v0)=[d(fd(β0,v0)),d(fd(β0,v1)),d(fd(β0,v2))]
(19)
则发射-接收-多普勒三维的降维矩阵表示为
(20)
降维后第l个距离门的回波信号可表示为
(21)
针对目标所在距离区域,对降维后回波信号的杂波抑制最优权可通过最小方差无畸变响应(minimum variance distortionless response ,MVDR)波束形成获得,即
(22)
3 仿真实验
本小节通过仿真实验验证本文方法的有效性。表1给出了相应的FDA-MIMO雷达系统仿真参数。
3.1 杂波谱分布
图3给出了机载FDA-MIMO雷达的杂波谱仿真结果。从图3(a)中可以看出,原始杂波谱由于二次距离依赖性,在空间频率域扩散严重。经过二次距离依赖补偿之后,不同模糊距离区域的杂波在发射-接收-多普勒三维空间被成功分离,如图3(b)所示。这是因为频率分集阵列在发射端引入了跟距离有关的频率因子,补偿之后的不同距离区域杂波的发射空间频率之间存在差异。图3(c)给出了经过多普勒补偿之后的杂波谱分布结果。可以看出目标距离区域的杂波谱在补偿之后能够近似实现空时谱配准。此时对于其他模糊距离区域的杂波来说补偿矢量是失配的,会造成杂波谱一定程度的扩散。图3(d)是目标距离区域杂波在空时二维平面的杂波谱分布情况,观察到在前视阵模式下,杂波多普勒存在一定的展宽,经过多普勒补偿处理之后,主瓣杂波能很好地对齐,如图3(e)所示。
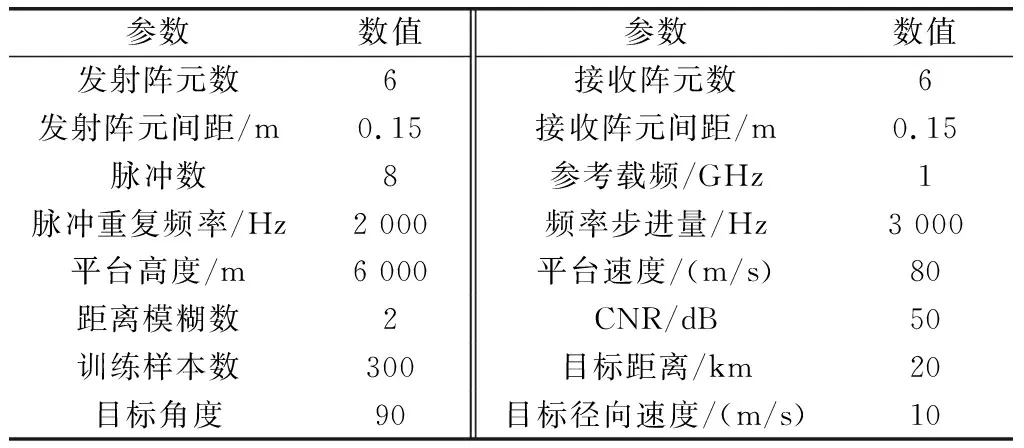
表1 系统参数Table 1 System parameters

图3 前视阵FDA-MIMO雷达的杂波谱分布Fig.3 Clutter spectra with forward-looking FDA-MIMO radar
3.2 距离-角度-多普勒自适应处理响应
图4给出了全维距离-角度-多普勒三维自适应处理方法和所提基于和差波束降维的距离-角度-多普勒三维自适应处理方法的响应结果比较。其中图4(a)和图4(b)给出了三维空间中的响应结果,图4(c)和图4(d)给出了发射-接收联合空域和时域的二维响应结果。如图4所示,所提方法能够形成于全维方法近似的响应结果,其杂波凹口对准杂波的分布,因此,可以有效地抑制距离模糊的杂波。由于和差波束降维处理,其相应的主瓣略微展宽。需要说明的是,仿真实验中假定训练样本足够多,这里假定为300,因此,全维处理方法具有良好的响应,而实际中的训练样本不足,此时全维处理器的响应将会发生畸变。因此,从所需训练样本量的角度看,降维处理器具有良好的稳健性。
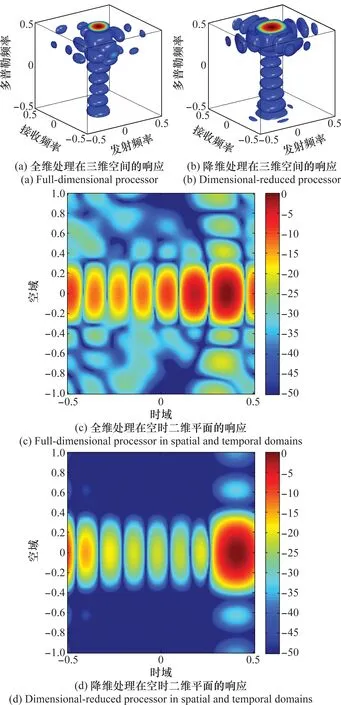
图4 距离-角度-多普勒自适应处理响应Fig.4 Response of adaptive range-angle-Doppler processing approaches
3.3 信杂噪比损失
图5给出了距离-角度-多普勒三维自适应处理方法的信杂噪比损失(signal-to-clutter-plus-noise ratio,SCNR)曲线。理论上,当训练样本满足独立同分布且样本数大于2倍系统自由度时,基于采样协方差矩阵求逆(sample matrix inversion ,SMI)-MVDR算法的性能损失小于3 dB。因此,对于全维的距离-角度-多普勒自适应处理算法需要大量的训练样本数。由图可见,和差波束降维方法与JDL和GMB方法的信杂噪比损失性能相当,相比于理想性能曲线,损失小于3 dB。需要说明的是,和差波束降维方法的系统自由度为12,而JDL方法的系统自由度为27,GMB方法的系统自由度13。而全维处理方法性能损失严重,主要是因为训练样本数有限,难以满足2倍系统自由度数目的条件。

图5 全维处理与降维处理的信杂噪比损失比较Fig.5 SCNR loss performance of full-dimensional processor and dimensional-reduced processor
4 结 论
本文基于FDA-MIMO雷达技术,提出了前视阵抗距离模糊杂波的方法,采用和差波束形成进行距离-角度-多普勒降维处理,实现了机载雷达距离模糊杂波的抑制。由于FDA-MIMO雷达能够在空间频率域进行距离模糊杂波的区分,通过采用距离依赖性补偿可以实现距离模糊杂波的分离,并补偿非正侧视雷达杂波的距离空变性,解决了传统方法难以克服距离模糊和距离依赖性的问题。仿真实验验证了采用和差波束降维处理技术能够实现距离模糊杂波抑制,并且具有对训练样本数稳健的特点,相比于最优处理器的性能损失在3 dB以内。
