一种顾及系统间偏差的GNSS差分定位研究
2018-12-06蒋军王晓旺原彬
蒋军,王晓旺,原彬
(中国电子科技集团公司第二十研究所,西安 710068)
0 引言
近年来,北斗、伽利略等卫星导航定位系统的发展,多模组合定位已成为趋势。GNSS多模组合将会提高导航定位的精度、可靠性及可用性。目前对于多模组合的研究大多是基于系统间简单的融合:相对定位各系统分别选取参考星[8-9]、单点定位时各系统的接收机钟差参数也是独立的。为了提高不同卫星导航系统的互操作性,Montenbruck等提出了系统间偏差(Inter-System Bias,ISB)的概念,并利用零基线研究了GPS/Galileo双差伪距ISB的特点[1];Odijk、Jacek Paziewski等人研究利用GPS/Galileo共有频段的ISB,分析了多模组合相对定位模糊度固定的成功率及基线解精度[2-3];Cai分析了在不同可见卫星数下,引入ISB后多模组合伪距单点定位的定位效果[4]。这些现有的研究结果表明,ISB的引入对于较为恶劣的观测环境下的导航定位,多模组合可以显著提高卫星导航定位的可用性及精度。对于伪距单点定位模式,由于其受轨道、钟差、电离层等误差影响较大[4-5],ISB随时间变化较大,一般需实时更新。双差模式,由于与卫星端和接收机端的误差大多数已被消除,双差ISB较为稳定,便于作为先验值引入。ISB的引入可以减少多模定位未知参数,增加观测方程的冗余信息,提高定位模型解的稳定性,本文主要针对 GPS/GLO/BDS/GAL四系统组合模式下的伪距差分定位,以 GPS为参考系统,研究差分定位模式下GLONASS、BDS、GALILEO与 GPS的系统间偏差,同时分析了多种类型接收机差分 ISB的特点。最后用实测数据分析了引入先验ISB的GNSS差分定位效果。
1 差分GNSS系统偏差的解算原理
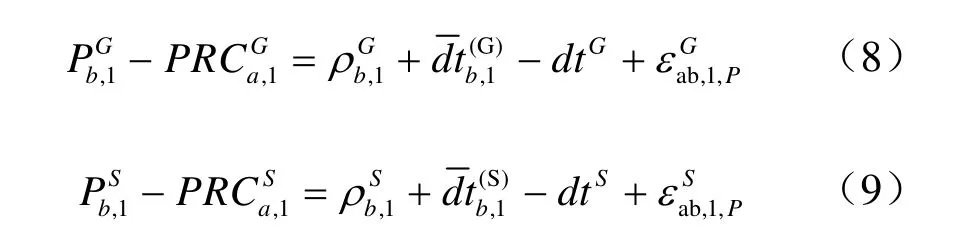
ISB是指不同卫星导航系统间的偏差,其构成与所选取的观测模型密切相关,在非差模式下,ISB包含不同卫星导航系统的时间偏差、接收机端的硬件延迟偏差等[4-5]。对于伪距差分定位,其实质与双差定位模式类似,因此ISB的构成相对简单,下面是由非差观测模型推导双差 ISB的过程,式(1)是简化的伪距非差观测方程:

以式(1)为例,其中上标G代表与某颗GPS卫星相关的参数,(G)代表与GPS系统相关的参数,a表示测站号,k指任意频率号,伪距非差观测值,dt是接收机钟差,dtG是卫星钟差,是接收机硬件码延迟,bG是卫星端的码延迟,是对流层延迟,是电离层延迟,表示伪距噪声。式(2)与式(1)中的参数类似,不同的是S表示GLONASS、BDS、GALILEO中的一个系统,表示S与GPS的系统时间偏差引起的延迟。
假设有测站a和b,以GPS L1及BDS B1频率为例,对于某颗卫星,a、b两站的观测值做差可以消除与卫星相关的误差,在解算ISB时采用较短基线或零基线时可以假设大气误差假设也被完全消除,单差观测方程如下:

由上式可以看出单差模式消除了卫星端的钟差、码延迟以及系统间的时间偏差,以GPS为参考系统,进一步做双差得:


流动站经过改正后的观测方程为:

2 ISB特性分析
由本文第1节的分析可知,双差伪距ISB主要受接收机硬件延迟的影响,与接收机端的 DCB类似,其受外界环境影响较小,在一段时间内一般认为是接收机端的各频点的硬件延迟稳定的[11],伪距在接收机端的延迟与码的频点及接收机类型密切相关,若两系统的两个频点差异越大,其硬件延迟差异可能也越大,GPS/GLO/BDS/GAL四系统所具有的信号种类较多,同一频点的码类型也不尽相同,本文仅选取各系统的1号频点做相关实验分析,其他频点的特点与其类似。表1是各系统1号频点的相关说明。

表1 GPS,GLONASS,BDS,GALILEO 1频段信号
GPS/BDS/GALILEO 均采用码分多址,GLONASS目前大多数卫星仍采用频分多址,其中k表示频率因子,取值范围为(-7,6),可根据卫星号从广播星历获得该值。根据表1可知GPS/GALILEO在L1与E1频段中心频点相同,GPS与其他系统均不一样。
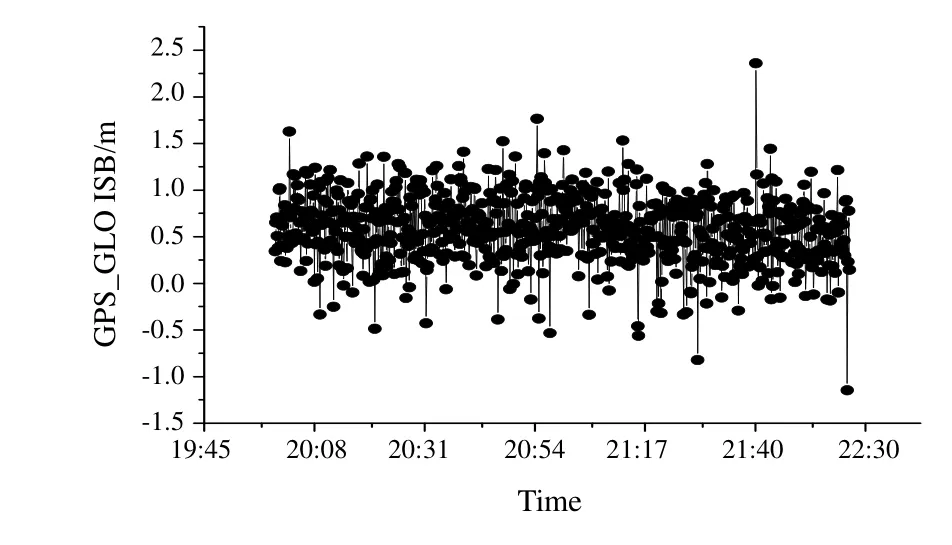
图1 某基线的GPS_GLO双差伪距ISB序列
图1是2014年7月9日两台相同类型的司南接收机在武汉地区采集的零基线数据根据第1节中的方法单历元解算的GLONASS L1的C/A与GPS L1的C/A间的双差ISB结果。由图1可知双差伪距 ISB的解算结果稳定,主要受伪距噪声的影响,因此可以用滤波或取其平均值作为ISB的解算结果。
2.1 同一类型接收机ISB分析
由于不同类型的接收机的硬件延迟不同,为了分析GLONASS、BDS、GALILEO相对于GPS系统的双差伪距ISB,本文分别对相同类型接收机及不同类型接收机间的实验数据估算双差伪距ISB。图2是2013年4月24日西安地区三台同一类型的Trimble R10接收机(点名分别为DLH、ISU、SEW)在同一时段采集的数据解算的 GPS_GLO、GPS_BDS、GPS_GAL双差伪距ISB结果。表2是3条基线解算的双差伪距ISB的平均值及标准差(每个系统对应的第一列为均值,第二列为标准差)。

图2 Trimble R10接收GLO/GAL/BDS双差ISB
由图2和表2可知Trimble R10不同的基线同一系统的ISB差异较小,GPS_BDS、GPS_GLO的ISB均在±0.5m范围内。GAL_GPS的双差ISB较小,均值几乎为 0,说明接收机类型相同时,若两系统有共同的频率,其双差伪距ISB可忽略,这与文献6的结论一致。

表2 Trimble NET R10双差伪距ISB的均值和标准差
2.2 不同类型接收机ISB分析
当接收机类型不同时,同一频点接收机硬件延迟有所差异,因此不同类型接收机差分ISB也更复杂。由于GLONASS系统目前大多数卫星仍采用频分多址技术,两卫星共用一个频率,每个波段共有12个频点,因此在接收机类型不同时,GLONASS系统的 ISB与卫星号密切相关。在估算 ISB时,GLONASS每颗卫星一个ISB参数,GALILEO仍采用一个参数。图3采用 mgex两个测站 jfng(Trimble NET R9)、wuh2(JAVAD TRE_G3TH)2015年年积日100天的数据估算的GLONASS和GALILEO双差ISB的结果。

图3 Trimble R9和JAVAD TRE_G3TH双差伪距ISB的结果
从图3左可以看出GLONASS频率通道号相同的两颗卫星(GLO 01及03)伪距ISB非常接近,另外伪距双差ISB与频率通道号呈现出一定的线性关系,经线性回归分析知其回归系数为0.97。因此在估算GLONASS卫星ISB时,可以只估计一个参数,不同的卫星ISB参数的系数与频率相关。图3右GALILEO双差伪距ISB的均值为1.91m,由此可以看出不同类型的接收机,频率相同时其ISB也较大,不能忽略,图3右GALILEO的ISB两端波动较大,主要是由于高度角较低,观测值噪声较大。
为了进一步分析不同接收机类型双差ISB大小及其稳定性,我们用6种不同类型的接收机在武汉地区采集了2014年11月12日到11月21日连续10天的观测值数据,中途均未进行开关机操作。在解算ISB时,分别用5种类型的接收机与Trimble NetR9采集的数据形成基线,每条基线用滤波的方式一天估算一个ISB参数,BDS双差伪距ISB的解算结果如图4所示。
由图4可知不同接收机类型ISB的差异较大,E类型的BDS的ISB10天的平均值为9.85m,而A类型的BDS的ISB为1.44m;从图4右下可以看出除了D类型的接收机其他类型的接收机ISB的稳定性较好,标准差std不超过2cm。D类型的ISB的稳定性最差,但其标准差也较小,不超过0.1m,其主要原因可能是D类型接收机的BDS伪距多路径较大,如图5。
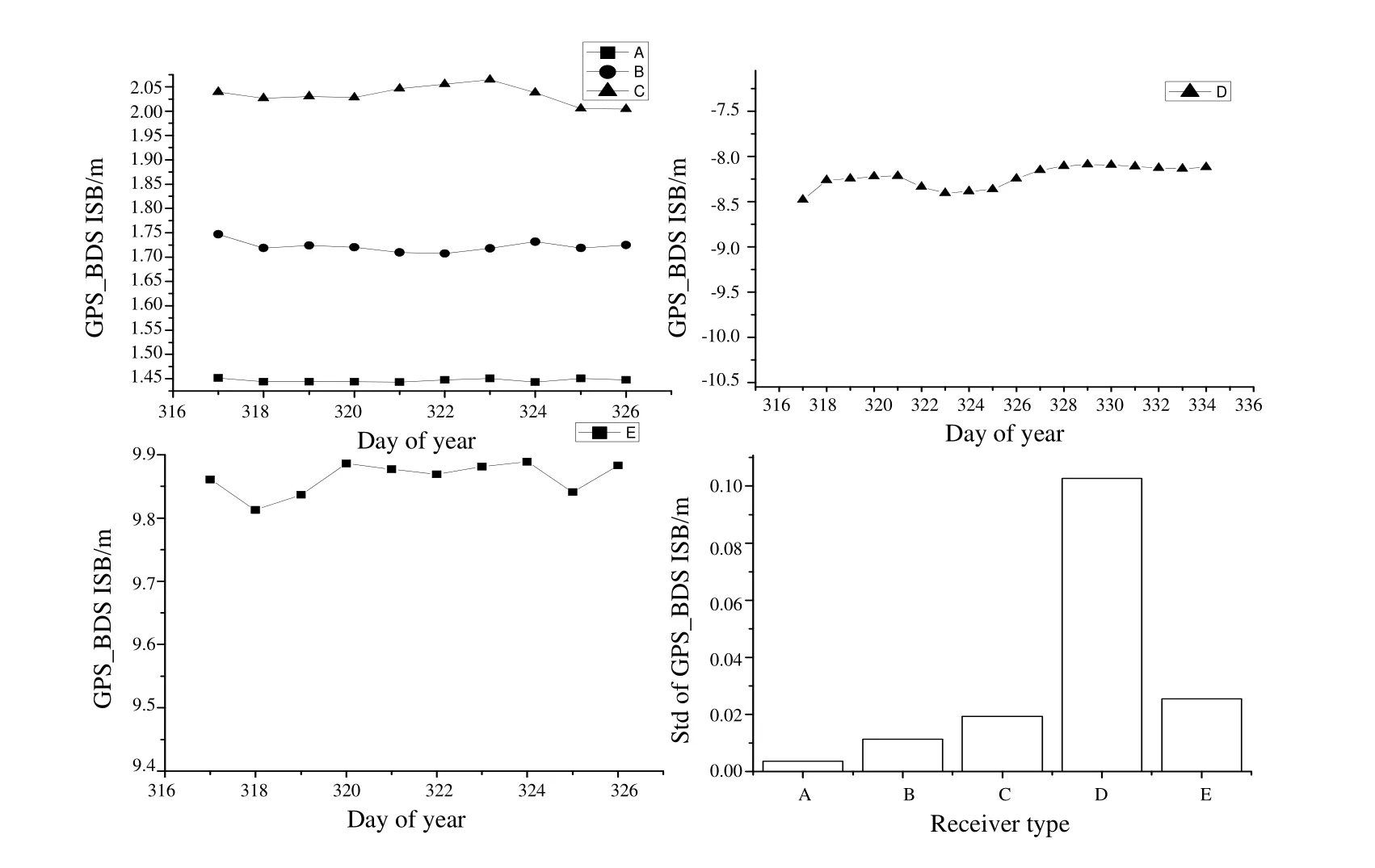
图4 5种不同类型接收机与Trimble NetR9接收机双差BDS ISB

图5 5种不同类型的接收机10天多路径均值
3 ISB应用效果分析
差分GNSS由于其终端价格低廉,仅使用伪距观测值,算法简洁,不需要固定相位观测值的整周模糊度,精度在观测值条件较好时可以达到亚米级的精度,因此在较高精度的导航用户中使用较为普遍。在差分GNSS的实际应用中,一般是各系统分别生成改正数,然后在终端改正其共视卫星的观测值,然后以多模单点定位的方式解算终端的坐标,其所需解算的未知数为3+N,N为参与解算的系统数。由本文第1节的分析可知,若在流动站引入双差ISB,则在终端只需要求解一个接收机钟差参数,因此终端只需观测所有卫星导航系统中的任意4颗星即可实现差分GNSS定位。在引入差分ISB后,观测值冗余信息增加,与此同时可以提高城市峡谷等恶劣条件下导航定位的可靠性。本文分别用Trimble NET R9接收机西安地区2014年12月23日采集的开阔天空环境下的静态数据和 2015年 1月 11日城市环境采集的动态数据对引入先验双差ISB后的差分GNSS定位效果进行分析。做动态测试前首先用同样两台接收机测试一组短基线数据根据本文第1节的原理解算出双差ISB,然后在用其进行动态数据的差分定位分析。
对于静态数据,为了模拟复杂环境下的定位效果,在计算出双差ISB后,处理流动站数据的过程中,采用2+2+2+N的方式,即2颗GPS卫星,2颗GLONASS卫星,2颗BDS卫星,及N颗Galileo卫星的观测数据,由于 Galileo卫星数较少,一般情况下N<=2。实验数据来自两台同样类型的司南接收机,采集时长为一天,分别用传统模式(3+N个未知数)和新模式(4个未知数)处理。为了更加逼真的模拟复杂环境下的定位效果,采用随机函数按照上述方式挑选卫星,由于具有随机性,对采集数据一共处理了8次。图6是其中某一次用两种模式处理的结果,表3是8次处理的定位坐标的rms统计结果。

图6 传统和新方法差分GNSS定位结果比较

表3 8次模拟差分GNSS定位rms统计结果
由图6结合表3可知在引入ISB后定位,差分GNSS定位精度明显提升,平面精度由米级提高到亚米级,高程精度也提到了200%以上。

图7 城市环境采集的卫星数及可用性
为了进一步验证引入双差ISB的差分定位效果,本文同样处理了高层建筑物较为集中城市环境下采集的数据,流动站与基准站的接收机类型均为Trimble NET R9,图7是所采集数据的可见卫星数及传统方法可用历元(卫星数不小于3+N可用)统计结果,可用历元统计结果(1:可用,-1:不可用)。

图8 城市环境差分GNSS的定位误差结果
从图7中可以看出,城市环境复杂,卫星数变化较大,采用4系统观测值数据仍有很多历元无法定位。图8是用传统方法和新方法处理该组数据水平和高程方向的精度结果(图中仅显示两种方法都能得到定位结果的情况)。从图中可以看出无论是水平方向(图8上部分)还是高程方向(图8下部分)对于误差较大的历元新方法的定位精度均有大幅度提高。
4 总结
本文基于伪距观测方程介绍了GNSS双差伪距ISB及其解算原理,分析了双差ISB的特点以及引入先验ISB后差分GNSS的定位效果。首先通过推导证明了接收机硬件延迟是双差伪距ISB主要构成因素,并说明了差分GNSS引入双差ISB的合理性。然后用通过分析相同类型接收机和不同接收机双差ISB的特性,可以发现:
(1)双差伪距 ISB随时间的变化较小,非常稳定,实验结果表明日变化稳定性优于2cm;
(2)相同类型接收机双差伪距ISB较小,BDS、GLONASS的ISB一般不超过0.5 m,Galileo的双差ISB几乎为0,主要原因是其与GPS的L1频率相同。接收机类型不同时双差ISB较大,GLONASS各频点的ISB均不相同,与频率通道呈现一定的线性关系,Galileo的双差ISB不再接近于0。最后分析了引入先验ISB后的差分GNSS定位结果,结果表明由于该方法减少了差分定位的待估参数,在观测环境较为复杂时,导航定位的可靠性大大提升,定位精度也明显提高。