基于扩展计划行为理论的驾驶员疲劳驾驶行为心理影响因素分析
2018-12-06史晨军邓院昌林庆丰
史晨军,邓院昌,林庆丰,张 圆
(中山大学智能工程学院,广东 广州 510006)
随着我国机动车保有量的迅速增加,频发的交通事故造成了巨大的财产损失和人员伤亡。2016年,我国共计发生了约21.3万起交通事故,这些事故导致约6.31万人死亡、约22.64万人受伤,直接财产损失超过12.07亿元[1]。已有相关研究表明[2-4],驾驶员疲劳驾驶是引发道路交通事故的主要原因之一,其导致的交通事故数量占交通事故总数的10%~20%,而在特大交通事故中驾驶员疲劳驾驶导致的交通事故比例达40%以上,并且驾驶员疲劳驾驶造成的交通事故危害甚至超过了酒后驾驶和药后驾驶。
目前,国内外相关学者已针对驾驶员疲劳驾驶开展了一系列的研究。在国外,Radun等[5]为了研究驾驶员性别与疲劳驾驶行为之间的关系,在对芬兰驾驶员进行调查后发现,男性驾驶员比女性驾驶员更容易出现驾驶疲劳的现象;Walting等[6]为了研究人口学因素、态度、感知合法性、性格特征和冒险因素等变量对驾驶员疲劳驾驶行为的影响,对293位驾驶员进行了调查,结果发现驾驶员的年龄和态度比性格特征和冒险因素对驾驶员疲劳驾驶行为的影响更显著;Vural等[7]运用机器学习训练分类器的方法,对驾驶员打哈欠、眨眼以及其他面部动作进行了识别,并将此作为判断驾驶员疲劳驾驶的依据。
在国内,对于驾驶员疲劳驾驶的研究则主要集中在驾驶员疲劳驾驶行为检测方面。如金立生等[8]基于驾驶模拟器研究和分析了驾驶员在疲劳状态下的转向盘操作行为特征参数,建立了基于支持向量机的驾驶员疲劳状态检测模型;胡鸿等[9]基于疲劳检测分级和预警与自动智能控制技术,开发了车载驾驶员疲劳驾驶实时检测与控制系统。此外,也有部分学者对驾驶员疲劳驾驶行为的客观因素进行了相关分析。如李都厚等[10]通过对国内外道路交通事故数据进行统计分析后发现,30岁以下男性驾驶员、3年以下和10年左右驾龄的驾驶员是疲劳驾驶所致交通事故的高发群体;2∶00~6∶00和15∶00~16∶00是驾驶员疲劳驾驶导致交通事故的高发时段。
然而,国内外对于驾驶员疲劳驾驶行为影响因素的分析仍然较少,因此从心理学角度深入了解驾驶员为什么会进行疲劳驾驶行为,对有效减少因驾驶员疲劳驾驶而发生的交通事故数量和提升道路交通安全管理水平是至关重要的。鉴于此,本文以计划行为理论为主体框架,新增法律规范和行为经验两个解释变量,建立了基于扩展计划行为理论的驾驶员疲劳驾驶结构方程模型,从社会心理学的角度探究驾驶员疲劳驾驶行为的影响因素以及各影响因素之间的关系路径,为减少驾驶员疲劳驾驶行为提供一定的参考依据。
1 研究理论与模型建立
1.1 计划行为理论(TPB)的基本原理
计划行为理论(the Theory of Planned Behavior,TPB)主要用于解释个体行为的决策过程。相关研究指出,TPB对包括行人过街使用手机[11]、驾驶员超速驾驶[12]和驾驶员驾驶时使用手机[13]等在内的行人和驾驶员的不安全交通行为有较高的解释能力和预测能力。TPB主要有3个变量:态度、主观规范和知觉行为控制。该理论认为行为受到行为意向和知觉行为控制的直接影响,态度、主观规范和知觉行为控制通过行为意向间接影响行为。其中,态度是指个人对某一行为所抱有的正面或负面的感觉;主观规范是指个体感知到的社会压力对某一行为的支持或反对;知觉行为控制是指执行某一行为时所感知到的促进或阻碍因素,是对既定行为可控程度的感知[14]。
1.2 基于扩展行为理论的驾驶员疲劳驾驶行为结构方程模型的建立
TPB对于其他相关解释变量的加入是开放的,Bamberg等[15]认为增加新的变量可以提高TPB的解释能力和预测能力;Conner等[16]通过研究发现,行为经验与行为意向和驾驶员疲劳驾驶行为有直接的关系;Kim[17]通过研究也发现,法律规范与驾驶员在驾驶时使用手机行为意图存在负相关的关系。此外,笔者在与职业驾驶员访谈时,他们表示不担心因为疲劳驾驶而得到法律制裁,并且认为自己拥有丰富的疲劳驾驶经验,可以很好地处理突发情况。因此,为了探讨驾驶员疲劳驾驶行为的心理因素,本文拟加入行为经验(Experience of Behavior,EB)和法律规范(Legal Norm,LN)两个新的解释变量,构建了基于扩展计划行为理论(the Extended Theory of Planned Behavior,Ex-TPB)的驾驶员疲劳驾驶行为结构方程模型(Structural Equation Modeling,SEM),详见图1。

图1 基于扩展计划行为理论(Ex-TPB)的驾驶员疲劳 驾驶行为结构方程模型Fig.1 Diagram of the structure equation model of fatigued driving behavior based on Ex-TPB
2 模型验证与质量评估
2. 1 问卷设计与收集
数据收集采用问卷调查的形式进行。问卷内容包括三部分:问卷说明、基本信息、Ex-TPB量表。其中,基本信息主要包括被试者的性别、年龄、驾龄、睡眠质量等;Ex-TPB量表是根据Ajzen提出的TPB原始问卷内容[18]及其驾驶员相关疲劳驾驶行为的研究结果[19~20]进行改编而成。所有题项均采用5级李克特计分形式,1~2分表示低倾向,3分表示一般,4~5分表示高倾向。
调查问卷首先设置了一个潜在驾驶员的疲劳驾驶情景,被试者家里突发急事,需要当天赶回去处理,而被试者的家与工作地的距离超过了350 km,且被试者恰好满足以下4种情况中的一种或几种:①在工作6 h后开车;②在回家前一晚的凌晨2点入睡,且睡眠时间不超过6 h;③在开车前身体感到不适;④在回家前已开车很长一段距离。
在Ex-TPB量表中,三个题项用于描述行为态度,如“ATT1 在上述情景下开车回家是安全的”等;三个题项用于描述主观规范,如“SN1您的家人不会阻止您在上述情景下开车”等;三个题项用于描述知觉行为控制,如“PBC1您认为自己有能力在上述情景下继续开车并保持安全”等;两个题项用于描述法律规范,如“LN1如果您身边有人在上述情景下开车,他/她将会被警察发现并处罚款,扣6分 ”等;三个题项用于描述行为经验,如“BE1在过去,您经常遇到与上述情景相似的情况,但您会选择继续开车直到终点”等;三个题项用于描述行为意向,如“BI1如果您遇到上述情景,您打算继续开车回家不做任何休息”等;最后被试者将报告“FB在过去一年里,在遇到与上述情景类似的情况下,开车的次数”用于测量行为变量。
所有问卷均通过网络填写方式完成,为了保证问卷的质量,设置了同一IP地址的用户不能重复填写问卷。此外,被试者必须拥有驾驶证且最近一年有过驾驶经历。被试者需要在规定时间内(5 min)完成问卷。本次调查共收回364份问卷,剔除无效问卷18份后,获得有效问卷346份。
2. 2 问卷数据分析
2.2.1 调查样本的描述性分析
在346份有效问卷中,被试者包括175名男性和171名女性;年龄在26岁~34岁之间的被试者最多,共159人,占总数的45.95%;驾龄占比最多的是2~3年,共164人,占总数的47.4%;有265人表示在开车2~4 h会感受到疲劳,占总数的76.59%;有161人的睡眠质量好,占总数的46.53%。
2.2.2 调查问卷的信度和效度分析
本文采用SPSS 22.0软件对调查问卷进行信度和效度分析。在问卷的信度分析中,采用克隆巴赫α系数检验问卷内部的一致性。结果表明:Ex-TPB量表整体信度为0.78,6个潜变量的克隆巴赫α系数均大于0.7,说明Ex-TPB量表具有较好的内部一致性,符合问卷设计要求。
在问卷的效度分析中,采用KMO检验和Bartlett球型检验判断变量是否适合做因子分析。结果表明:KMO值为0.822,该值大于0.50,Sig值为0.00,该值小于0.05,KMO检验和Bartlett球型检验通过,说明问卷可通过因子分析萃取公共因子。在公共因子的萃取上,使用最大方差法提取了6个特征值大于1的因子,解释变异量分别为28.338%、11.032%、8.422%、8.219%、6.965%和6.649%,累计方差解释率为69.625%,并且所有观测变量在各自潜变量上的因子载荷均大于0.5,表明潜在变量有很好的建构效度。
2. 3 模型质量评估
调查问卷的信度和效度都符合要求后,本文利用上述建立的驾驶员疲劳驾驶行为Ex-TPB结构方程模型(SEM)(见图1),进行了模型质量评估。模型质量评估主要包括两个部分,一是模型外在质量评估,二是模型内在质量评估。
模型外在质量评估主要检验问卷收集的数据与假设模型的匹配程度,其评价指标包括绝对适配度指数(RMESA、GFI、AGFI)、增值拟合指数(NFI、IFI、TLI、CFI)和简约适配度指数(NC、PGFI、PNFI)。修正后的结构方程模型适配度指标见表1。

表1 修正后的结构方程模型适配度指标
由表1可知,各评价指标均符合评价标准的要求,表明问卷收集的数据与模型有很好的适配度。
模型内在质量评估主要通过潜在变量的组合信度和平均方差抽取量来判断,其中组合信度用于评价一组潜在变量指标的一致性程度,具体评估结果见表2。
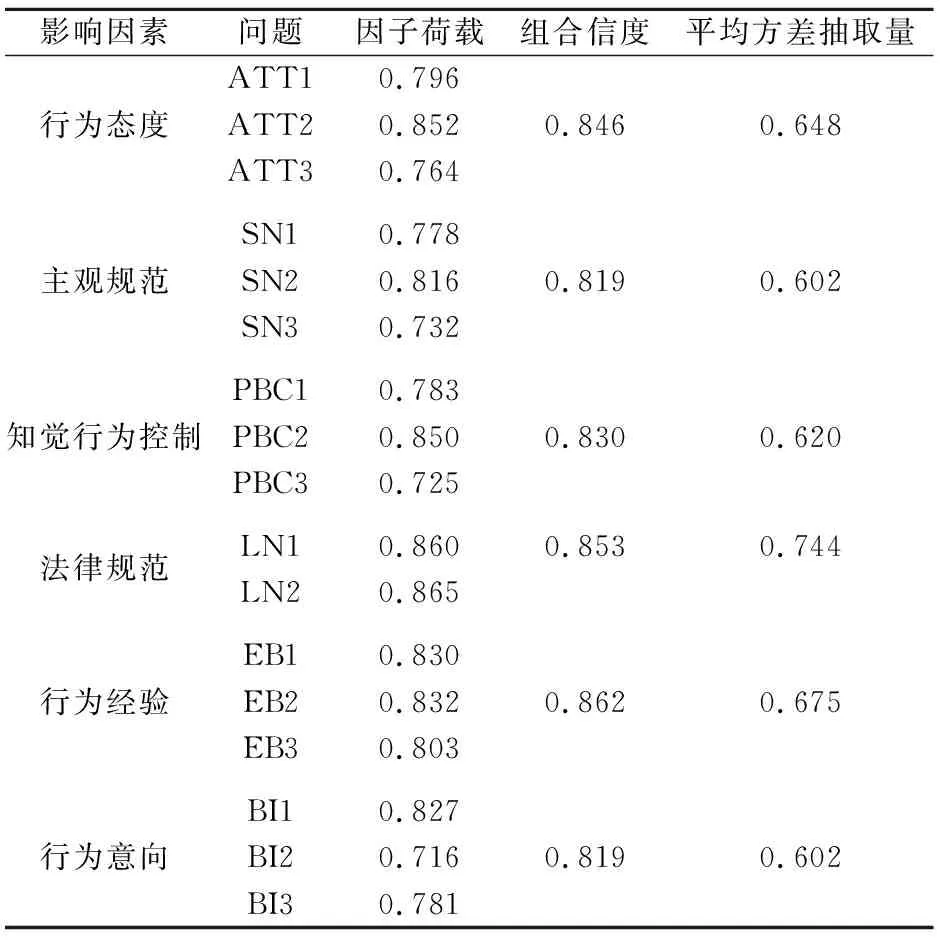
表2 结构方程模型内在结构指标
表2可知,平均方差抽取量用于评价一个潜在变量能被一组观察变量有效估计的聚敛程度,各潜在变量的组合信度均大于0.7,说明模型的建构信度较好;各潜在变量的平均方差抽取量均大于0.50,表明模型聚敛性良好。
2. 4 模型路径分析
综上分析可知,所建立的结构方程模型质量较好,表明假设的模型路径是合理的,从而得到如图2所示的驾驶员驾驶行为影响因素Ex-TPB结构路径图。

图2 驾驶员疲劳驾驶行为心理影响因素Ex-TPB 结构路径图Fig.2 Ex-TPB structure road map of the phychological factors influencing drivers’ fatigued driving behavior
3 驾驶员疲劳驾驶行为影响因素之间的相关性分析
在SEM中,内因变量是指模型当中受到任何一个变量影响的变量;外因变量是指模型当中未受到其他变量影响,却能影响其他变量的变量。SEM输出的内因变量和外因变量间的标准化回归系数(Standardized Regression Weight,SRW)以及各外因变量间的标准化相关系数,见表3。

表3 驾驶员疲劳驾驶行为影响因素之间的相关性分析
注:“*”表示在0.05水平下显著。
由表3可知:①行为意向、行为经验和知觉行为控制对驾驶员疲劳驾驶行为有显著正向影响(SRW分别为0.389、0.155和0.139),且行为意向对驾驶员疲劳驾驶行为的影响最大;②行为态度对行为意向有显著正向影响(SRW为0.257);③主观规范对行为意向有显著正向影响(SRW为0.198);④法律规范对行为意向有负向影响, 但不显著(SRW为-0.106);⑤知觉行为控制和行为经验均对行为意向有显著正向影响,且知觉行为控制对行为意向的影响稍大于行为经验(SRW分别为0.218和0.217);⑥法律规范、行为经验和行为态度等5个变量之间有相互影响,且法律规范与主观规范的相关性最强(SRW为-0.373)。
3.1 行为意向与行为态度之间的相关关系分析
行为意向是驾驶员疲劳驾驶行为最主要的影响因素,表明行为意向对驾驶员疲劳驾驶行为有很强的预测能力,这与Jiang等[19]的研究结论基本一致。行为意向受到行为态度、行为经验、主观规范和知觉行为控制的显著影响,且受行为态度的影响最大。因此,交通管理部门可通过影响驾驶员的行为态度来干预驾驶员疲劳驾驶行为意向,如积极开展杜绝驾驶员疲劳驾驶行为的宣传教育工作,让驾驶员重视疲劳驾驶行为的危险性,同时还要让驾驶员对交通事故产生畏惧心理,以减少驾驶员疲劳驾驶行为。
3.2 知觉行为控制与行为经验之间的相关关系分析
知觉行为控制和行为经验均显著正向影响驾驶员的行为意向和疲劳驾驶行为,表明随着驾驶员疲劳驾驶行为次数的增多,驾驶员疲劳驾驶经验的不断丰富,可导致自我控制能力减弱,久而久之便形成了习惯,便可跳过行为意向直接影响驾驶员疲劳驾驶行为,这与张磊等[21]对自行车不安全行为的研究结论基本一致。在驾驶员感到疲劳的时候,警告措施能有效地提高驾驶员的自控能力,降低驾驶员继续疲劳驾驶的几率,所以交通管理部门可在高速、国道、省道等道路上多设置疲劳驾驶行为警告标示牌,用以警示驾驶员,杜绝疲劳驾驶行为。此外,交管部门应对驾龄较长的驾驶员进行有针对性的教育与培训工作,如组织他们重新学习交通安全知识,并考试,以提高他们对交通法律法规的认识。
3.3 主观规范与法律规范之间的相关关系分析
主观规范对驾驶员疲劳驾驶行为意向有显著正向影响,而法律规范对驾驶员疲劳驾驶行为意向的影响是最弱的。其原因可能是:①现行、有效的疲劳驾驶检测系统没有得到广泛运用,驾驶员认为即便自己疲劳驾驶,警察也不会发现;②家人、朋友等有时也会进行疲劳驾驶,导致他们的劝告缺乏说服力;③目前对驾驶员疲劳驾驶行为判定的依据不全,仅仅只是通过连续驾驶时间来判断,未考虑到驾驶员工作时间、累计驾驶时间和身体状况等因素;④现行的法律法规针对驾驶员疲劳驾驶行为的处罚力度不足,对驾驶员没有起到约束作用。
综上分析,本文提出以下建议:①交管部门应加强对驾驶员疲劳驾驶行为的检查,综合考虑能让驾驶员感到疲劳的多种因素,进一步完善法律法规的制定,同时做好相关法律法规的教育工作,提高驾驶员对相关法律法规的认识;②每个驾驶员要以身作则,在日常开车感到疲劳时,把车停在路边安全的地方,打开车窗休息,同时要劝诫身边人减少疲劳驾驶行为。
3 结 论
(1) 本文运用计划行为理论,新增法律规范和行为经验两个变量,构建了基于扩展计划行为理论(Ex-TPB)的驾驶员疲劳驾驶行为结构方程模型,并通过问卷调查验证了该结构方程模型对驾驶员疲劳驾驶行为具有较强的解释能力和预测能力。
(2) 从社会心理学角度分析了驾驶员疲劳驾驶行为的原因,结果发现:行为态度、知觉行为控制、主观规范、行为经验均对驾驶员疲劳驾驶行为意向有显著正向影响,仅法律规范的影响不显著;行为经验、知觉行为控制和行为意向对驾驶员疲劳驾驶行为有正向显著影响。这可为交管部门开展更有效的交通安全教育工作与制定监控管理措施提供依据。
(3) 本研究还存在一定的局限性,一些其他的因素如道德规范、风险感知等也会对驾驶员疲劳驾驶行为有一定的影响,今后可开展进一步的研究。
