小型多旋翼无人机动力系统参数的测定
2018-12-03朱利凯
黄 强,王 海*,刘 明,姚 刚,朱利凯
(1.安徽工程大学 机械与汽车工程学院, 安徽 芜湖 241000;2.中国科学院合肥智能机械研究所, 安徽 合肥 340104)
随着航空技术的发展,无人机开始出现在人们生活的各个领域,而小型多旋翼无人机因为其优异的可控性和垂直起降的特性,在航空摄影、农业植保、运输、电力检测等方面都有非常广泛的应用[1].最近几年,随着微机电和微传感器不断发展与更新升级,对于多旋翼飞行器的研究有了很大进展,在一定程度上解决了多旋翼飞行器开发的一些关键问题[2].多旋翼飞行器的动力系统一般由直流无刷电机、螺旋桨以及电子调速器组成,而动力系统的参数则直接影响多旋翼样机的飞行时间、载重、飞行姿态控制等重要指标,所以在多旋翼飞行器设计前对动力系统的参数进行实验标定具有很重要的意义.对于多旋翼动力系统的研究,文献[3]通过硬件和软件结合的方式设计了一种转子升力测试平台,并建立转子升力动态模型.最后通过实验验证了该升力动态模型的有效性.文献[4]提出四旋翼飞行器的精确控制需要使用动力系统推力,而该飞行器推力不可直接测量,继而推出一种悬停状态下的四旋翼推力估计方法,并对四旋翼动力系统建模,建立了悬停状态下用于推力估计的线性系统.
目前的研究表明,多旋翼无人机设计过程中动力系统参数对其飞行控制具有重要影响,而现阶段要么将转子系统固定在一维力传感器上对其单一的动力学参数如升力、转速等进行检测,要么采用实验成本较高的风洞试验、电机测试装置等专用仪器进行检测.前一种方法测量精度低,可靠性不高;后一种方法精度较高,但实验成本高,难以推广适用.利用光电传感器和力传感器并结合软件设计了一种多旋翼动力系统的测试平台.该测试平台利用杠杆原理,通过光电传感器获取当前旋翼转速,并通过杠杆原理在力传感器上获取力的数据,通过力臂换算最终获得动力系统在当前转速的升力桨毂力.最后根据转速、升力和桨毂力的数据,通过上位机进行分析得到动力系统的升力系数以及桨毂力系数,并建立PWM信号到转速一阶系统模型.测试平台结构简单,测试精确,可以广泛应用于小型多旋翼飞行器动力系统参数的测定.
1 四旋翼无人机的动力学模型
四旋翼无人机是一种典型的欠驱动的控制系统,它通过控制固定在4个对称角上的由电机和螺旋桨构成的转子系统产生的升力来控制四旋翼无人机在6个自由度上的运动[5].为了简化四旋翼的动力学模型,做出以下假设:首先,四旋翼的主体结构为刚体且是对称的.其次,螺旋桨具有固定的俯仰角.最后,四旋翼的质心与其几何中心重合,转动惯量直接通过几何中心来估计.典型四旋翼的坐标系模型如图1所示.图1中给出了每个螺旋桨的升力、桨毂力、扭矩、角速度以及力臂.

图1 四旋翼坐标系模型
根据动量理论,在理想状态下四旋翼转子i产生的升力Fi为
(1)
式中,Ct为升力参数;Ωi为旋翼转速;ρ为空气密度;S为桨叶面积.又因为各个参数均为常数,所以该方程可以简化为
(2)
式中,Kt为归一化后的升力系数.同样,可以得到四旋翼的桨毂力Hi为
(3)
简化后的方程为
(4)
式中,Kh为归一化后的桨毂力系数.
同时根据电机模型[6]表现出来的非线性,建立从发送给电机指令的脉宽调制(Pulse Width Module,PWM)信号到旋翼转速Ω的一阶系统模型.
(5)
式中,u为PWM脉宽(us);Tm是时间常数;Km是稳定增益系数.
2 四旋翼无人机的结构参数
用Solidworks软件构建的四旋翼飞行器的三维结构图如图2所示.模型的组成部分包括直流无刷电机、螺旋桨、碳纤杆、碳纤杆管夹、电池、Mega2560 Arduino开发板和碳纤维机身部分.碳纤维材料具有强度高、质量轻等优点,非常适合作为小型多旋翼飞行器的构成材料.同时根据构建的三维结构图,可以直接在Solidworks中对四旋翼结构和转子的惯性质量矩进行求解.
四旋翼参数如表1所示.由表1可知,通过Solidworks求解出的关于机体X轴、Y轴和Z轴的惯性矩Ix、Iy、Iz以及整个四旋翼的总质量m,各个转子到机体中心的距离L.

图2 四旋翼三维结构

参数数值单位参数数值单位Ix5.216e-2Kg·m2L352.76mmIy2.628e-2Kg·m2M1.597KgIz7.457e-2Kg·m2
3 升力系数和桨毂力系数测定系统设计
3.1 升力系数测定装置设计
为了简单有效地对单个转子系统的升力系数进行标定,设计了测试平台.升力系数测试装置三维结构设计如图3所示.
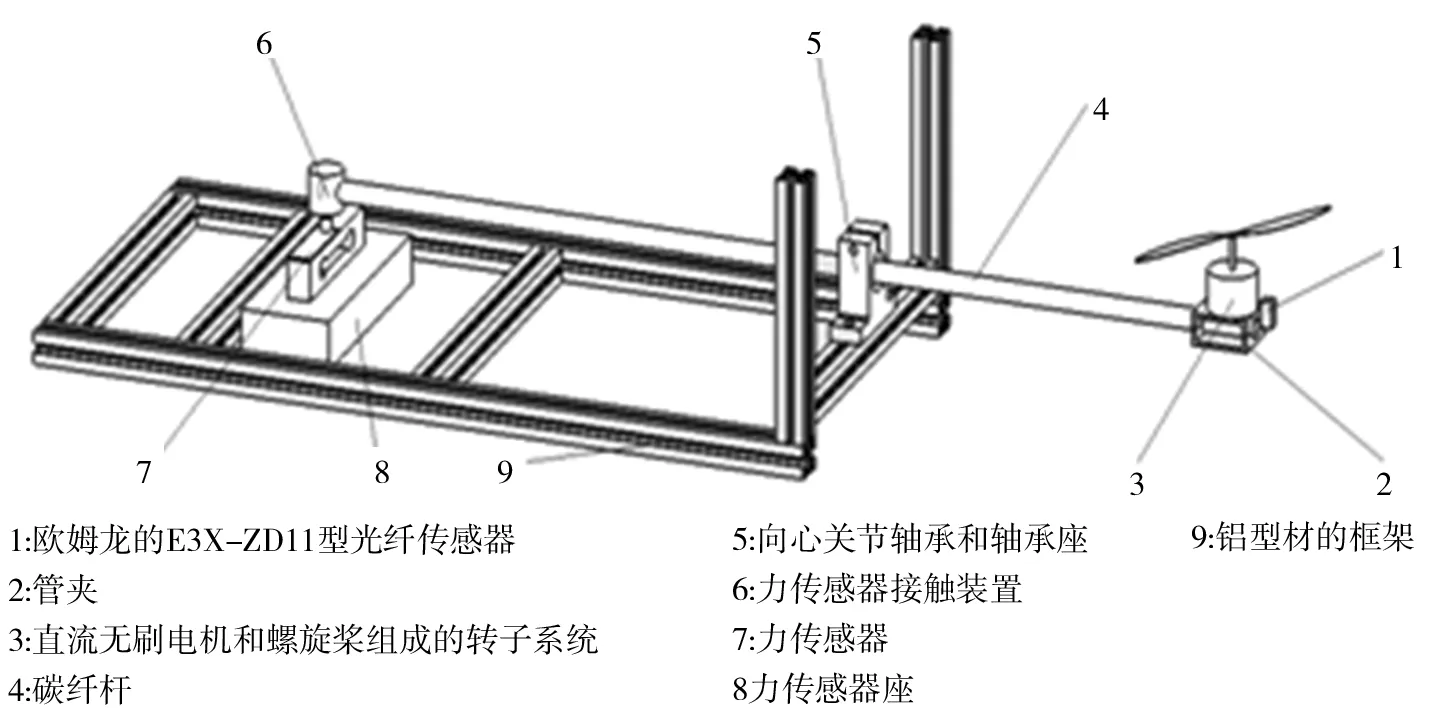
图3 升力系数测试装置三维结构设计

图4 升力系数测试装置
实验装置搭建如图4所示.由图4可知,测试平台利用杠杆的原理,通过中间的向心关节轴承实现杠杆原理的测量.其中光电传感器固定在碳纤杆的管夹上,并使其红外发射和接收端口处在螺旋桨的半径范围内.所用力传感器的精度为0.01 g,量程为1 000 g,可以满足测量需求.Arduino开发板在3号引脚上产生占空比可调的PWM信号驱动电机和螺旋桨旋转,同时光电传感器输出脉冲信号并通过示波器进行显示,通过计数脉冲个数即可通过公式得到旋翼的当前转速,最后分析得到相关的升力系数.
3.2 桨毂力系数测定装置设计
为了更好地对单个转子系统产生的桨毂力进行测试,对升力系数测定装置进行了一定的改进,从而使其可以进行桨毂力系数的标定实验.测试装置设计如图5所示.由图5可知,通过引入另一个直流无刷电机和旋翼,并将它们横向放置,根据正反桨的工作原理,两个旋翼转动时产生的升力将相互抵消,同时左边的旋翼产生向下的桨毂力,右边的旋翼产生向上的桨毂力,这样就可以在力传感器上获得相关力的数据,并通过杠杆的原理进行力臂的换算,最终得到桨毂力的大小.实验装置搭建如图6所示.
3.3 实验测试

表2 升力系数测试数据
通过升力系数测定装置进行实验得到的结果如表2所示,转速数据可以根据转速计算公式得到.
(6)
式中,c为接收到的脉冲个数;p为叶片数;ts为时间间隔.研究中p=2,ts=200 ms.而升力可以根据杠杆原理得到
Fttest·L1=Ft(true)·L2,
(7)

图7 转速-升力拟合曲线
将得到的转速数据和升力数据输入到Matlab的工作区,并利用Matlab的Curve Fitting tool进行转速-升力的曲线拟合.根据式(2)及式(4),对其进行二次拟合,得到转速-升力拟合曲线如图7所示.根据Matlab给出的拟合结果可以看出,R-square项越接近1表示拟合效果越好,经由Matlab可以得到该曲线的R-square项为0.988 2,说明曲线的拟合效果较好,可以很好地表达两组数据之间的函数关系.同时根据拟合曲线可以得到升力系数K_t的值为0.066 82.转速—升力的二次拟合方程为:
(8)

表3 桨毂力系数测试数据
通过桨毂力系数测定装置进行实验得到的数据如表3所示,根据杠杆原理可以得到:
Fh(test)·H2=2Fh(true)·H1,
(9)
从而获得实际桨毂力的大小,结合获得的转速数据,通过Matlab进行二次拟合可以得到.转速-桨毂力拟合曲线如图8所示.根据图8给出的拟合结果可以得出R-square等于0.991 6,说明二次拟合可以很好地表达转速和桨毂力之间的函数关系,并可以得到桨毂力系数Kh为0.002 684.所以,转速-桨毂力的二次拟合方程为:
(10)
3.4 转速测量
上文提到了利用光电传感器的特性通过接收脉冲信号来进行转速的测量.具体的测量过程是通过将光电传感器接收到的信号输入Mega2560 Arduino开发板的2号引脚,再通过Arduino开发板将数据处理后发送到串口,这时可以通过Matlab软件进行程序的编译使其可以读取发送到串口的数据并进行实时的绘图,这样就可以得到实时传输过来的转速数据.
PWM信号和转速信号关系如图9所示.由于光电传感器的读取误差,发送到串口的数据存在一定的波动,这里取两个峰值的平均值作为当前旋翼的转速.由图9可知,每当增加50 us的PWM信号时,转速的提升需要60 ms的稳定时间,因此可以求得其时间常数Tm为60 ms.根据公式:
(11)
结合采集到的转速与PWM信号数据,通过计算得到稳定增益系数km为0.275.因此可以建立如下的PWM信号到转速的一阶系统模型:
(12)

图8 转速-桨毂力拟合曲线 图9 PWM信号和转速信号关系
4 结论
通过SolidWorks设计了一种四旋翼的三维模型,并对其结构参数进行求解.研究开发了一种通过Arduino结合Matlab实时检测转速[7-8],并通过力传感器和杠杆机构对转子系统产生的升力和桨毂力进行测定的实验平台.通过该实验平台可以得到当前转子系统的升力系数、桨毂力系数、PWM和转速的关系,从而对小型多旋翼无人机的动力系统进行标定.该实验平台可以有效地对小型多旋翼无人机的动力系统参数进行测定,并具有一定的稳定性和准确性,为多旋翼无人机的前期设计工作提供了数据支持,有效地解决了多旋翼无人机在飞行过程中无法准确地对其动力系统参数进行测量的问题.实验装置也存在一定的不足和需要改进的地方.实验采用一维力传感器,存在一定的测量精度问题,影响了测量的准确性,以后可以考虑加入二维或者三维力传感器来提高测量精度.
