BDS卡尔曼滤波网格伪距差分定位精度分析
2018-12-03余梦洋秘金钟方书山谷守周张洪文宋传峰
余梦洋,秘金钟,方书山,谷守周,刘 一,张洪文,宋传峰,王 俊
(1.山东科技大学 测绘科学与工程学院,山东 青岛 266510;2.中国测绘科学研究院,北京 100830;3.国家测绘地理信息局 第二大地测量队(黑龙江第一测绘工程院),哈尔滨 150025;4.四川省国土勘测规划研究院,成都 610045)
0 引言
北斗卫星导航系统(BeiDou navigation satellite system,BDS)是我国拥有自主知识产权,独立研发、独立运行的卫星系统,于2012年底完成了亚太地区组网服务,同时计划2020年在全球完成组网并对全球提供服务[1]。BDS是采用卫星星历导航的定位系统,但是由于BDS单点定位精度受卫星星历误差、卫星钟的钟误差、卫星信号传播过程中大气延迟误差以及测量随机误差等影响较为显著,因此,采用传统单点定位方法已不能满足用户对定位系统性能的需求[2]。同时,由于城市环境的复杂性,如多路径效应、信号遮挡、信号丢失等问题给实时定位精度的可靠性、稳定性带来很大的影响。目前,随着BDS的广泛使用,BDS移动终端得到了快速的发展,如BDS车载终端的研发、BDS舰船终端的研发、BDS终端研发助力共享单车运营管理等。因此,在城市环境中如何提高物流运输终端、共享单车、穿戴设备等定位精度,实现其精细化和智能化管理,也是亟待解决的问题。
卡尔曼滤波是卡尔曼在1960年发表了一篇关于离散数据线性滤波递推算法的论文之后诞生的。文献[3]使用抗差估计理论,形成了抗差自适应的滤波新理论详细分析了自适应滤波的特性。文献[4]通过改进原有的卡尔曼滤波,提高跟踪和结果的精度。文献[5]提出以载波相位平滑后的伪距作为卡尔曼滤波的观测量,通过载波相位平滑技术和卡尔曼滤波共同作用可以更好的抑制噪声、多路径等随机误差对定位结果的影响,提高定位精度及稳定度。
随着卡尔曼滤波方法在卫星导航领域的广泛应用,为了尽可能地减小各种误差对定位结果的影响,将卡尔曼滤波最优估计理论应用到终端定位解算模型中,以提高BDS的定位精度和动态性能。本文通过基于格网化的伪距差分改正数,采用卡尔曼滤波技术提高BDS终端的定位精度、灵敏度和定位速度等,提高了系统服务能力。
1 卡尔曼滤波模型
卡尔曼滤波是对一个离散时间线性系统的状态进行最优估算,即用一套数学的递推公式对系统的状态进行估计。卡尔曼滤波将前后历元的状态联系起来,每一个周期包含了预测更新和校正更新,它的计算过程实质上就是一个不断预报和不断修正的过程,可以很方便很高效的处理实时数据。卡尔曼滤波在导航领域中被广泛使用,正是利用了滤波的平滑、准确的特性和对系统的最优估计简单、容易实现的优点[6-7]。
卡尔曼滤波一步预测过程描述了系统状态随时间的变化,即由前一个历元(即第k-1个历元)估计值,运用已经建立的系统状态模型来预测当前时刻(即第k个历元)的值。这个过程涉及到的方程分别是状态方程和预测协方差方程,其计算公式为
(1)
卡尔曼滤波校正过程,实质上就是把实际测量值运用起来,以此来校正系统一步预测的状态结果,即状态先验估计值。此过程涉及到的方程分别是卡尔曼滤波增益方程、最优估计方程和优估计相应的协方差方程,其公式为
(2)

2 网格BDS卡尔曼滤波伪距实时定位算法
网格伪距差分原理是不同于国内常用的网络伪距差分原理,它是采用了一种网格化的虚拟参考站方法,即通过一定方法把连续运行参考站(continuously operating reference stations,CORS)所覆盖的区域,按照一定的规则划分成网格,虚拟参考站的位置就处于所划分的格网的网格中心点之上,利用反距离加权的内插模型生成网格中心点上的伪距差分改正值,这样可以消除网络差分定位时存在的CORS数据传输安全问题以及可能泄露国家大地点的精确坐标问题;用户通过单点定位获知自己的概略位置,以此判断自己所在网格,并利用所在网格伪距改正数,从而高效、安全地实现差分定位[8-10]。
网格BDS卡尔曼滤波系统伪距差分的整体实现路线如图1所示:首先在服务器端运行差分改正数的生成、播发系统,由CORS站数据生成各个站差分改正数,利用网格中心点附近的站差分改正数反距离内插法出此格网差分改正数信息,之后编码实时播发给用户;其次BDS终端方面需要获取终端数据,进行单点定位,获取终端的概略位置,判断终端所处的格网,之后接收相应网格差分数据,以此实现BDS终端差分定位服务[8-10]。
2.1 网格差分改正数生成模型
BDS网格伪距差分定位系统,其空间部分由BDS卫星系统组成,其地面部分是由m个基准站Bi、利用等间距规则把经纬线划分的网格Gk和终端流动站M组成,其中M位于某一网格G0中[8],如图2所示。
图2中:GEO(geostationary Earth orbit)表示地球静止轨道;IGSO(inclined geo-synchronous orbits)表示倾斜地球同步轨道;MEO(medium Earth orbit)表示中圆地球轨道。
参考基准站Bi到第j颗BDS卫星的伪距观测方程[11]可以表示为

(3)
(4)
式中:Xj、Yj、Zj为第j颗卫星发射信号时刻的地球坐标系下的维坐标;XBi、YBi、ZBi为基准站Bi在地球坐标下的真实。


(5)
式中:dtBi为计算所得接收机钟差;δtBi为剔除钟差后的基准站Bi钟差残差。

(6)
式中ai为内插系数即基准站Bi差分改正数所占比重。本文采用反距离加权的插值方法[12]为例进行说明,反距离加权的数学模型为
(7)
由式(7)可知,XGk、YGk、ZGk为格网中心点坐标,且由式(7)可知ai需满足的条件为
(8)
由式(7)及式(8)便可化简出格网中心点Gk的伪距改正数

(9)
2.2 卡尔曼滤波伪距差分定位模型
随着卡尔曼滤波的深入研究,卡尔曼滤波技术已经应用于求解全球定位系统(global positioning system,GPS)位置、速度和时间。但在BDS伪距差分定位中仍然适用[13]。假设车载终端低速运动,则其运动状态可采用常速模型,可表示为
(10)
式中:下角表示历元号;X为描述运动接收机的状态向量;A为前后历元的状态转移矩阵;W为过程噪声向量且为白噪声。假设采样间隔为T,则有
(11)
(12)
在某历元k,利用BDS系统的伪距观测方程,可以得到卡尔曼滤波系统的观测方程为
Zk=HkXk+Vk
(13)
式中:Vk为观测量残余;Z为观测向量,由BDS伪距观测值组成;H表示观测量和系统状态之间的关系矩阵,且有
(14)
Z=ρ(0)-ρ(c)-cdtk+v0k+ε
(15)

以上式子即可组成网格BDS卡尔曼滤波系统,然后根据卡尔曼滤波的递推公式,进行求解出状态向量和相应的协方差阵。
3 实验与结果分析
本次在湖南省内,选取部分区域作为实验区域,如图3所示,此区域内有29个基准站,利用网格差分改正数模型,以此得到各个网格中心点的改正数,网格起始纬度为27°N~30°N,起始经度为111°E~114°E,划分间隔都为1°,用3条纬度带和3条经度带划分成9个网格。网格编号自左上角开始,按从左到右、从上到下原则,依次为1,2,…,9。
本次手持机伪距差分进行了2次测试,时间分别为2017年07月27日9时至19时共计10 h和2017年7月28日15时至2017年07月29日1时共计10 h,采用连续静态定位方式,将1台华辰北斗手持机放置在一个观测墩上,进行连续观测,测试环境如图4所示。为了分析手持机实时网格伪距差分定位精度,采用实时动态差分法(real-time kinematic,RTK)工作模式解算出此点位的坐标,将RTK方式获得的点位坐标作为准确值,并将手持机差分定位结果以准确坐标为原心建立站心坐标系,求得网格伪距差分解算结果北(N)方向、东(E)方向和天(U)方向的残差,如图5和图6所示。
由图5和图6可以求出N、E和U方向偏差的单位权中误差,以及水平方向的均方根(root mean square,RMS)如表1所示,以此可以反映手持机伪距差分定位的精度。
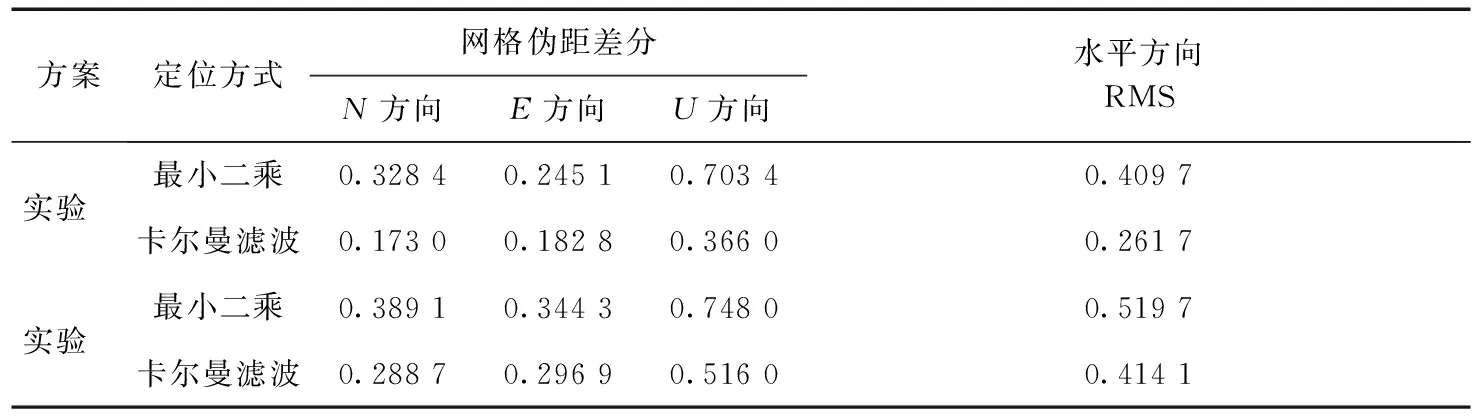
表1 手持机差分N、E和U方向偏差单位权中误差统计 m
由表1得知,手持机网格伪距差分采用最小二乘和卡尔曼滤波的方法进行实时定位,方案1水平方向的定位精度分别为0.409 7和0.261 7 m,水平精度提高了36.1 %,在高程方向的定位精度分别为0.703 4和0.366 0 m,高程精度提高了48.0 %,方案2水平方向的定位精度分别为0.519 7和0.414 1 m,水平精度提高了22.3 %,在高程方向的定位精度分别为0.748 0和0.516 0 m,高程精度提高了31.0 %,从一定意义上来说,实验结果均达到了亚米级精度;从系统性能上来看,卡尔曼滤波对差分结果具有更好的平滑、最优的估计、最佳的系统性。总体来看,2次实验结果均达到亚米级的精度,实现了网格伪距差分的高精度实时定位,能够满足用户需求。
4 结束语
本文为了实现BDS高精度、连续性定位的目标,采用卡尔曼滤波网格伪距实时差分定位方法,充分利用了卡尔曼滤波在BDS网格伪距差分定位中具有最优估计解算的特性,并进行了实验。数据实验证明,在手持机BDS网格伪距差分结果的外符合精度方面,采用最小二乘法和卡尔曼滤波方法均在在水平方向上达到了亚米级定位精度;但卡尔曼滤波结果较最小二乘结果更平滑、更可靠,水平精度提高了30 %左右,高程精度也提高了40 %左右,但是其精度仍还有待提高。
综上所述,手持机BDS卡尔曼滤波网格伪距差分方法具有相当的精度、稳定性和可靠性。但是,还是存在一些问题,比如手持机高程方向的定位精度还不够高,下一步可通过优化网格改正数的生成和播发、优化差分定位算法等来改善高程定位精度;实现手持机终端的动态网格差分问题,可通过研究动态卡尔曼滤波参数来实现动态卡尔曼滤波实时网格伪距差分定位。
