多平台BDS导航增强网络配置探讨
2018-12-03吴小婧张晓坤邓平科吴海涛
吴小婧,张晓坤,邓平科,吴海涛
(中国科学院 光电研究院,北京 100094)
0 引言
卫星导航技术具有覆盖全球的高精度导航定位性能,但也有一定的缺陷[1-2],一方面在城市商业区,其精度、完备性、连续性及可用性等方面都无法直接满足用户的导航需求,另一方面卫星导航信号受电离层的影响。因此,人们正在积极探求其他有效的高度在电离层以下的的导航平台来补充和增强卫星导航定位系统。
从20世纪90年代开始,平流层飞艇被认为是继卫星和地面通讯站之后的第三代导航通讯平台[3-5],其所处的环境较为稳定,能够保障信号质量。平流层飞艇具有费效比高、生存能力强和载荷装配灵活等特点,能以较小的投入有效保障导航定位系统稳定工作。因此,平流层飞艇成为目前卫星导航定位系统的一个重要补充平台。
为了克服卫星导航信号受电离层影响的问题,有效地提高导航系统的精度和完备性,本文提出了利用平流层飞艇,结合传统的地基增强平台,建立天空地一体化区域导航增强系统,本文在北斗卫星导航系统(BeiDou navigation satellite system,BDS)可用和不可用2种模式下,对天空地一体化组网配置方案进行了设计和研究。在增强平台的布设中,采用边缘重叠交叉拼接的方式来扩大服务区域,一个区域的增强平台可以为另一个区域使用,保证了性能,也节省了增强平台的布局配置。通过仿真分析验证了所提组网方案的精度和可行性,表明采用空间立体组网的天空地一体化区域导航增强系统,可以为北斗二号提供有效的增强和补充。
1 区域导航系统方案
本文设计的天空地一体化区域导航增强系统能独立工作、快速反应,同时也与BDS相兼容[6-7],系统的结构组成如图1所示(部分连线未标出)。
本系统包括基本系统和增强系统2部分,其中基本系统是BDS,增强系统由地面控制分系统和天空地增强平台分系统两部分构成。地面控制分系统主要包括卫星导航参考站、中心站、上行站等系统;天空地增强分系统主要包括平流层飞艇增强平台、地球静止轨道(geostationary Earth orbit,GEO)卫星增强平台、陆基及海基伪卫星增强平台。系统各组成部分的功能如下所述:
1)BDS发送BDS导航数据给增强平台和用户;
2)平流层飞艇增强平台,接收BDS导航信号和电文信息(在BDS卫星播发电文不可用时,接收上注站或GEO卫星转发的星历数据),结合平台惯导等辅助信息确定自身精确位置,生成导航增强信号,利用再生体制发送给用户;
3)GEO卫星增强系统通过征用现有的通信卫星,利用其通信卫星转发器,向用户播发导航信号,同时为其他增强平台提供辅助信息,如精密星历、钟差信息、增强平台的运行信息等;
4)陆基和海基伪卫星发送增强平台信息给在其服务范围内的空基伪卫星和用户,改善几何构型;
5)地面参考站监测BDS卫星和其范围内的天基、空基、地基伪卫星并将数据发送给地面中心站;
6)地面中心站计算生成增强系统星历数据发送给地面上行站;
7)地面上行站将增强系统星历上行到增强系统各成员。
系统的工作流程如图2所示。
2 增强平台组网配置研究
2.1 平流层飞艇覆盖区域计算
为便于分析,给出单艘平流层飞艇对地球表面的覆盖示意图[8],如图3所示。
图3中:Re为地球半径;Oe为地心;α为仰角;S为平流层飞艇星下点;h为平流层飞艇距离地表高度[8];d是不考虑仰角情况下,平流层飞艇地心覆盖角;d′是考虑仰角情况下,平流层飞艇地心覆盖角。
显然,对平流层飞艇的地心覆盖角,有
(1)
对应的覆盖半径r,有
r=Red′
(2)
在计算平流层飞艇覆盖半径时,取α=4.5°,则平流层飞艇定位覆盖区半径如表1和图4所示。
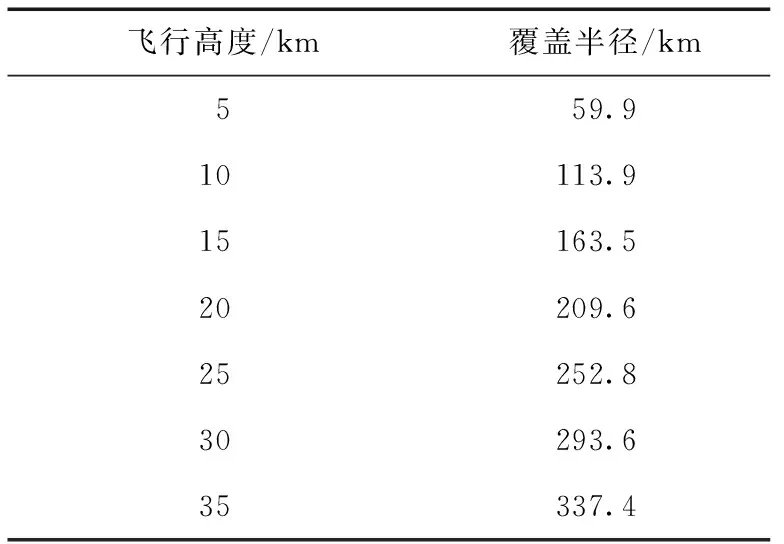
表1 平流层飞艇飞行高度和覆盖半径的对应关系
从表1和图4可以看出,平流层飞艇的覆盖半径与飞行高度有正比例关系,高度越高,覆盖半径越大。
2.2 平流层飞艇布局与GDOP关系分析
卫星的几何分布是获得良好定位精度的关键因素之一,几何精度衰减因子(geometric dilution of precision,GDOP)是反映卫星几何布局和定位精度的一个指标,定位精度一般可以表示为
σp=GDOP·σUERE
(3)
式中:σp是定位精度的标准差;σUERE是用户到(伪)卫星的伪距测量误差的标准差;GDOP是定位星座几何精度因子。式(3)表示了伪距测量误差的标准差与定位解之间的放大关系,GDOP值就是放大倍数。
选取n艘平流层飞艇组成星座进行导航定位结算,定位误差的协方差矩阵G为
G=(LTL)-1
(4)
(5)
式中:L是导航定位解算方程组系数矩阵;cosa、cosb、cosc分别为用户与第i艘平流层飞艇的斜距矢量在坐标系3个方向上的余弦。因此,对GDOP有
(6)
式中gii是协方差矩阵G的主对角线元素,反映的是定位误差的方差。
为便于分析平流层飞艇布局与GDOP的关系,采用平流层飞艇的高度角E和方位角A来描述系数矩阵L,有
(7)
(8)
因此,平流层飞艇构成星座的GDOP与星座中各飞行器高度角E和方位角A有直接关系,通过仿真验证了文献[8-9]提出的平流层飞艇布局与GDOP的关系为:
1)平流层飞艇定位星座中顶座星(高度角最大的那艘平流层飞艇)高度角越大,则星座GDOP值越小;
2)当顶座星高度角一定时,底座星(其他几艘高度角较小的平流层飞艇)高度角越小,则星座GDOP越小;
3)当星座中各平流层飞艇高度角一定时,底座星彼此的方位角之差越接近(以3艘底座星为例,则方位角差120°),则星座GDOP越小;
4)当顶座星高度角一定、底座星高度角一定、且彼此间方位角差也一定时,底座星的方位角具体取值与GDOP没有关系。
2.3 增强平台独立组网配置研究
文献[10-12]中的研究显示,平台数量越多,系统导航定位精度越高。但平台数量的增加必伴随着经济成本的增加,所以实际应用中,在提高系统性能的同时,要兼顾平台数量的控制。本文在平台数量一定时,力求通过改善平台布局来提高系统的导航定位精度。
在本文中,设定增强系统的服务区域为200 km×200 km×20 km的立体范围,其中重点服务区域为中心区域的100 km×100 km×20 km立体范围。由于海面和陆地表面都位于地球表面,布局原理是一致的,因此,本文在地基增强平台的布局设计中,不区分海面或陆地表面。当需扩大服务区域时,可以采用边缘重叠交叉拼接的方式,平面拼接如图5所示,从而使得整个大区域只在边缘不超过100 km的带状区域为非重点区域,其余的中间区域全部成为重点区域,多个区域进行拼接时,一个区域的增强平台可以为另一个区域使用,节省了增强平台的布局配置。
针对单个局部区域,根据2.2节提出的平流层飞艇布局与GDOP关系的结论,以降低GDOP值和减少平台数量为原则,通过仿真试验,设计的地基增强平台基本布局和空基增强平台布局如图6所示。
图7、图8分别为地面用户和高度6 km空中用户的GDOP值分布图。
从图7、图8中计算结果可以看出,增强平台在如图6的布设下,地面用户和高度6 km空中用户的GDOP值均小于3,说明在BDS受干扰的情况下,在测距精度一定的条件下,方案可以获得良好的定位精度。
2.4 增强平台与BDS共同工作组网配置研究
增强平台增强BDS时,平台配置同2.3节,本文考虑用户在北京地区经纬度为2°×2°区域内进行GDOP仿真。地面用户和高度6 km空中用户的GDOP值分布情况如图9、图10所示。
从图9、图10中可以看出,BDS未受干扰时,增强平台在如图6的布设下,地面用户和高度6 km空中用户的GDOP值均小于1.6,在测距精度一定的条件下,增强系统可以有效提高BDS的定位精度。
3 结束语
本文对当前卫星导航系统可能受到干扰的情况进行了分析,提出了包括平流层飞艇、GEO卫星、地基平台的天空地一体化区域导航增强系统方案,在此基础上,兼顾系统性能和经济成本,重点研究平台布局方式,设计了平台的组网配置方案。在BDS不可用和部分可用2种模式下,对空中和地面用户进行了基于几何精度因子的仿真,仿真结果显示,文中的平台布设方案,可使用户的GDOP小于3,从几何精度因子方面保证了增强覆盖区域的定位精度。天空地一体化区域导航增强系统采用天空地立体组网,形成生命力更强的综合导航定位系统,可以为北斗二号提供增强和补充。本文的研究有助于今后进一步研究天空地一体化区域导航增强系统。
