井下环境对三维激光扫描测量精度的影响分析
2018-11-23贾正平
贾正平
(山西长治王庄煤业有限责任公司, 山西 长治 047100)
三维激光扫描技术在矿山行业中的应用,首先是需要能够深入到较复杂或危险的空间中作业,并能获取各种复杂的、不规则、或非标准的实体或空间的符合精度要求的点云数据,进而实现三维数据的快速对齐拼合,快速重构出实体目标或空间区域的三维模型[1-6]。
1 检测实验方案
由于南关煤业实验巷道比较狭长,较宽阔区域也可能会有盲区,单个测站无法完整获取巷道的三维信息,需要采用多个连续测站测量的方式获得整体数据,也需要将多个测站的扫描数据通过大地坐标拼接起来构成完整的模型,这就需要在扫描过程中控制好测站的位置、目标球的位置和组合形状。一般都采用将激光扫描仪架设在巷道中间的方式,便于兼顾巷道两侧,有巷道分岔口的地方需要架设在岔口处,对精度要求高的区段应适当增加目标靶个数,以便校正累积误差。为了保证点云数据对齐拼合的精度高、效果好,控制点不能布设在一条直线或一个平面上,且目标靶与仪器尽量分散些[7-12]。
三维激光扫描仪对井下勘探受信号发射距离、目标与信号发射的夹角、目标对激光束信号反射强度等有关[4]。该系统应用于矿山开采时扫描的是实际巷道,无论是否有喷浆支护,都是以岩石类颜色作为反射面,且表面凹凸不平,相对来说测量环境较为复杂,因此,需要检验待测区域的明暗、反射程度等属性对扫描仪的影响情况[13-15]。
原先已经有很多对三维激光扫描仪的精度影响因素的分析实验,比如下述激光对目标物的入射角的影响程度实验。将待检测的三维激光扫描测量仪安置在S点处,测量目标为一平面板(如图1,图2,图3所示),将该目标板安置在己安置的线段上,以逆时针方向旋转 10°,共旋转 9 次,观测 a,b,c,d,…j这9个位置处的平面板,采用相同的采样间隔在每个位置处重复观测5次[1-2]。

图1 激光入射角度对测量精度影响实验示意图
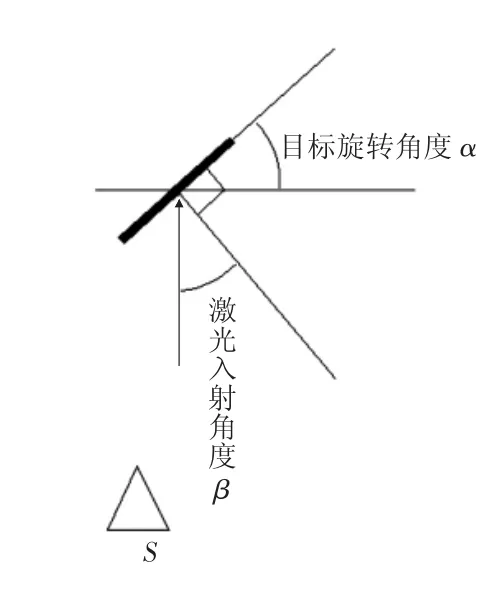
图2 激光入射角度示意图
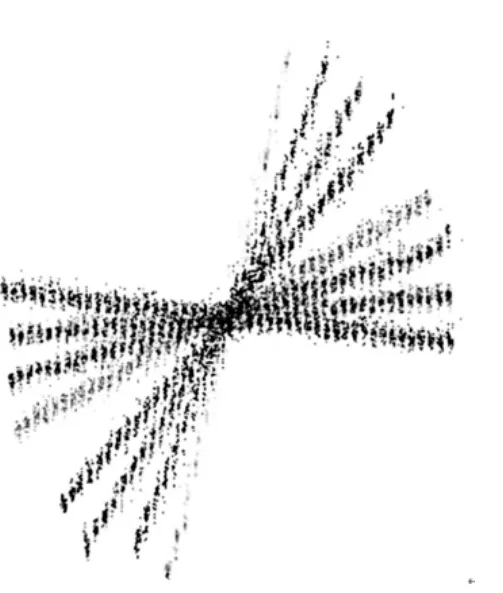
图3 不同角度得到的点云
从图2,图3中可以对实验结果有一个定性的描述,即当平面目标板与激光束垂直时,得到的点云最密集、数目最多,随着目标板的旋转,激光束的入射角度逐渐减小,得到的点云逐渐稀疏,直至入射角为零时,点云数据接近于零。
井下测量时考虑巷道空间以几米至数十米计,且表面凹凸不平,暂不考虑其他因素对扫描仪测量精度的影响,主要针对激光相对测量对象表面的入射角度对测量精度影响这个指标进行检测评价,以期得到量化对比值。
测量对象表面的入射角度的影响实验在井下斜坡道、采场脉外巷两地进行,首先将仪器设置了相同的参数,得到的点云细部特征如图4所示。
由图4可以分析得出,由于井下巷道空间狭小,且呈筒状走向、与激光束夹角较大,尽量将仪器摆放在与巷道垂直的方向上进行测量工作,并沿着巷道的中心线延伸,不仅可以保证巷道两侧的点云密度相当,而且可以获得更加密集的点云。
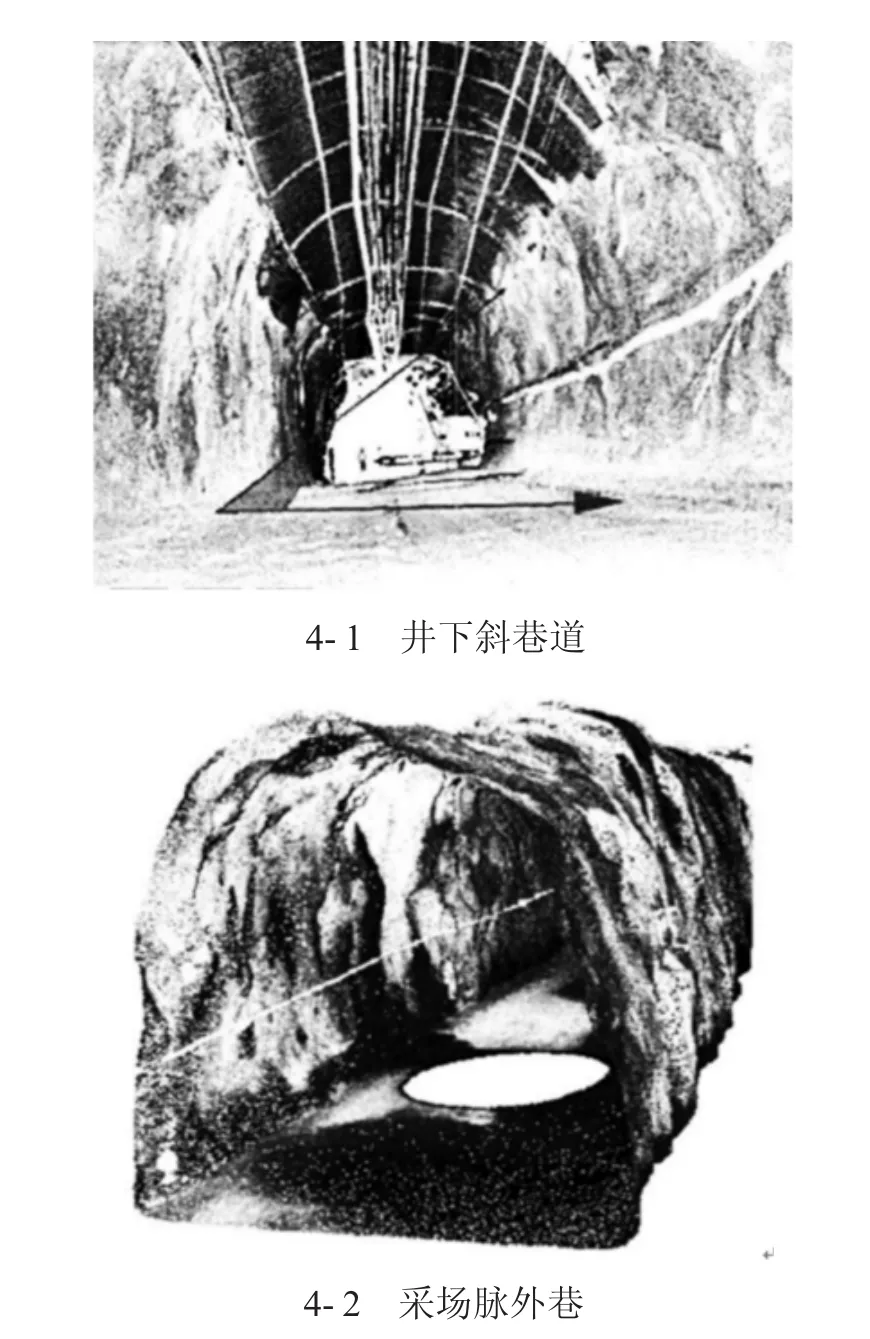
图4 点云细部特征
2 重复扫描精度分析
测量精度和测量准度是确定矿井扫描仪可靠性的重要指标。测量仪器的精度是仪器测量得到的数据与真值之间波动的值域,表示扫描仪的可靠性。所测误差在一定的范围内即说明仪器可用。在相同的观测条件下多次独立重复观测,这些结果之间的离散度可以用平均误差、极限误差等表示。
三维激光扫描仪可以高速获得扫描对象表面的三维坐标。本次试验采用观测值的中误差作为三维激光扫描仪内符合精度的评价指标。其具体操作方式为将扫描设备固定在一点,对同一个目标进行重复扫描,根据得到的数据进行精度评定。
观测值的精度可以以标准差σ来衡量,其表达式为:

在实际测量中不可能对某一个量进行无数次观测。只能根据有限次观测,然后用估算中误差朋来近似衡量其精度,如所示。此外还需要知道观测目标的真值X或误差Δi。
观测值的真值X常常是未知的,那么真误差Δi也就无法计算得到。那么就无法用求其中误差。在不变的观测条件下多次观测同一目标,可以以算术平均值x¯作为最或是值,这样就可以计算得到各观测值的改正值vi,且x¯在观测次数无限增多时将无限接近真值X。对于有限的观测次数,以x¯代替X,即相应于以改正值vi代替真误差Δi。从而得到按观测值的改正值计算观测值的中误差的公式:

这里设计一个实验,用来检验三维激光扫描仪在相同的观测条件下控制点重复测量精度,以及通过控制点对激光扫描数据进行坐标改正后的精度。FX三维激光扫描测量仪不仅可以高效地获得物体表面的空间信息,而且同时可以获取实体表面点的反射强度。
3 结语
在相同的观测条件下,三维激光扫描仪对每个目标点重复观测的内符合精度较好,重复观测精度比较稳定,只有极少数点可以看作是噪声点,这些点与激光扫描仪的扫描方向之间的夹角较大,接收到的激光脉冲数目少,强度低,导致单点定位精度偏低。
