反潜巡逻机声呐浮标巡逻搜索得到接触后行动方法研究
2018-11-21谭安胜王新为尹成义
谭安胜, 王新为, 尹成义
(海军大连舰艇学院舰船指挥系,辽宁 大连 116018)
0 序言
反潜巡逻机使用声呐浮标进行巡逻搜索时,通常布设声呐浮标线列阵(简称线列阵)。线列阵有单列阵和复列阵两种基本样式[1],指挥员可根据具体战场情况选择。实际作战中,接收到线列阵中浮标发出的信号,并不能证实一定是发现了潜艇,必须对接触进行识别。借助声呐浮标对接触进行识别是一种有效的手段[2-4]。根据线列阵的样式和线列阵浮标密度,接触可分为几种典型情况。对于单列阵来说可能是:1) 单枚浮标得到接触;2) 相邻两枚浮标同时得到接触。对于复列阵来说可能是:1) 复列阵中的两个单列阵各列单枚浮标相继得到接触;2) 复列阵中的两个单列阵各列同时两枚浮标相继得到接触。为了研究对接触进行有效识别的方法,应当从线列阵得到接触后的态势分析入手[5-7]。
1 单列阵得到接触态势分析模型
设单列阵中相邻浮标之间的间距为kdc,1≤k<∞[1],dc为声呐浮标的有效探测距离。针对单列阵得到接触的两种典型情况,分析单列阵得到接触后的态势。
1.1 单枚浮标得到接触
根据单列阵的结构,分k>2和1≤k≤2两种情况进行讨论。
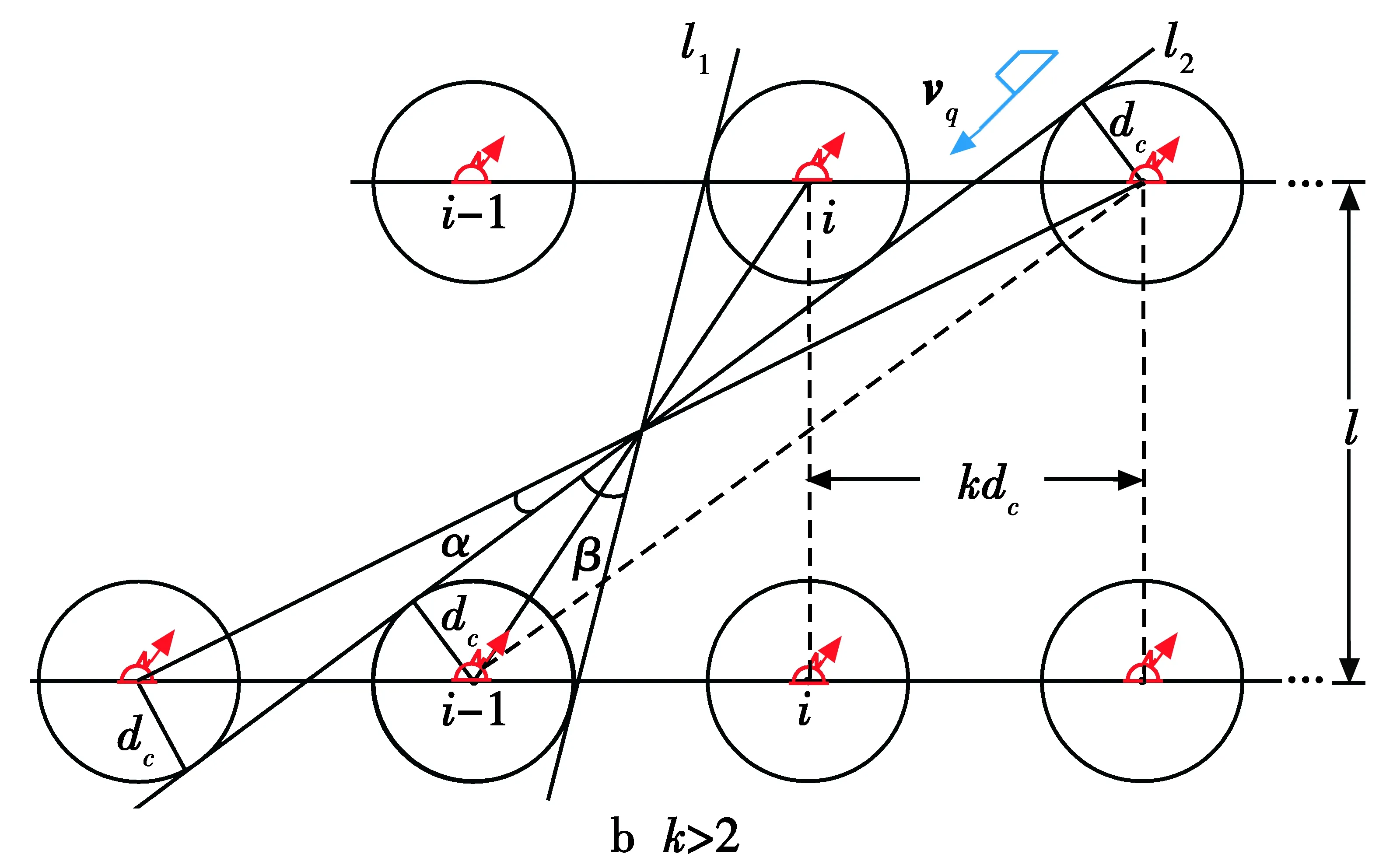
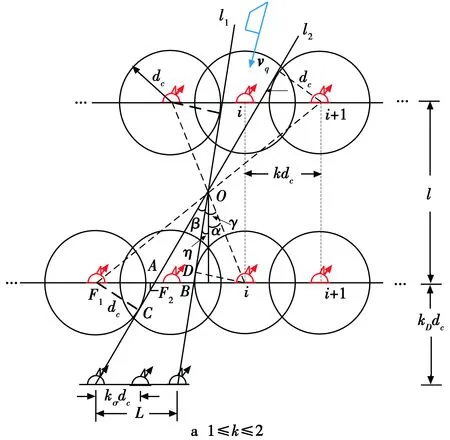
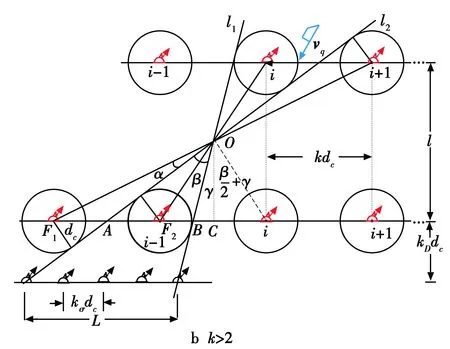
1.1.1k>2
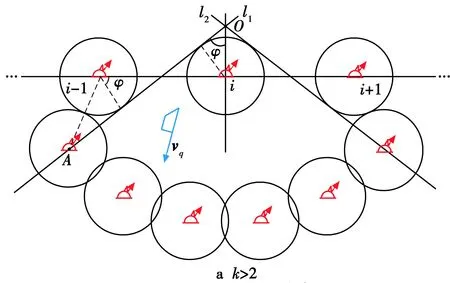
如图1a所示:l1分别与第i枚和第i-1枚浮标相切;l2分别与第i枚和第i+1枚浮标相切。如第i枚浮标得到接触,敌潜艇可能的航向范围由l1,l2的夹角2φ决定。持续接触时间由敌潜艇在第i枚浮标有效探测范围内走过的弦长确定,可能走过的弦长范围为[0,2dc],容易得出
φ=arccos(2/k)k>2
>。
(1)
考虑到线列阵的布设与敌潜艇最可能航向垂直,所以当k>2时,以2φ确定扇面范围考虑问题是合理的。
1.1.2 1≤k≤2
如图1b所示:l1分别与第i+1枚和第i-1枚浮标相切;l2分别与第i-1枚和第i+1枚浮标相切。如第i枚浮标得到接触,敌潜艇可能的航向范围由l1,l2的夹角2φ决定。持续接触时间由敌潜艇在第i枚浮标有效探测范围内走过的实际弦长确定,容易得出
φ=arccos(1/k) 1≤k≤2
>。
(2)


图1 单列阵单枚浮标得到接触时态势分析示意图Fig.1 Situation analysis of a single sonobuoy in a single array when obtaining contact
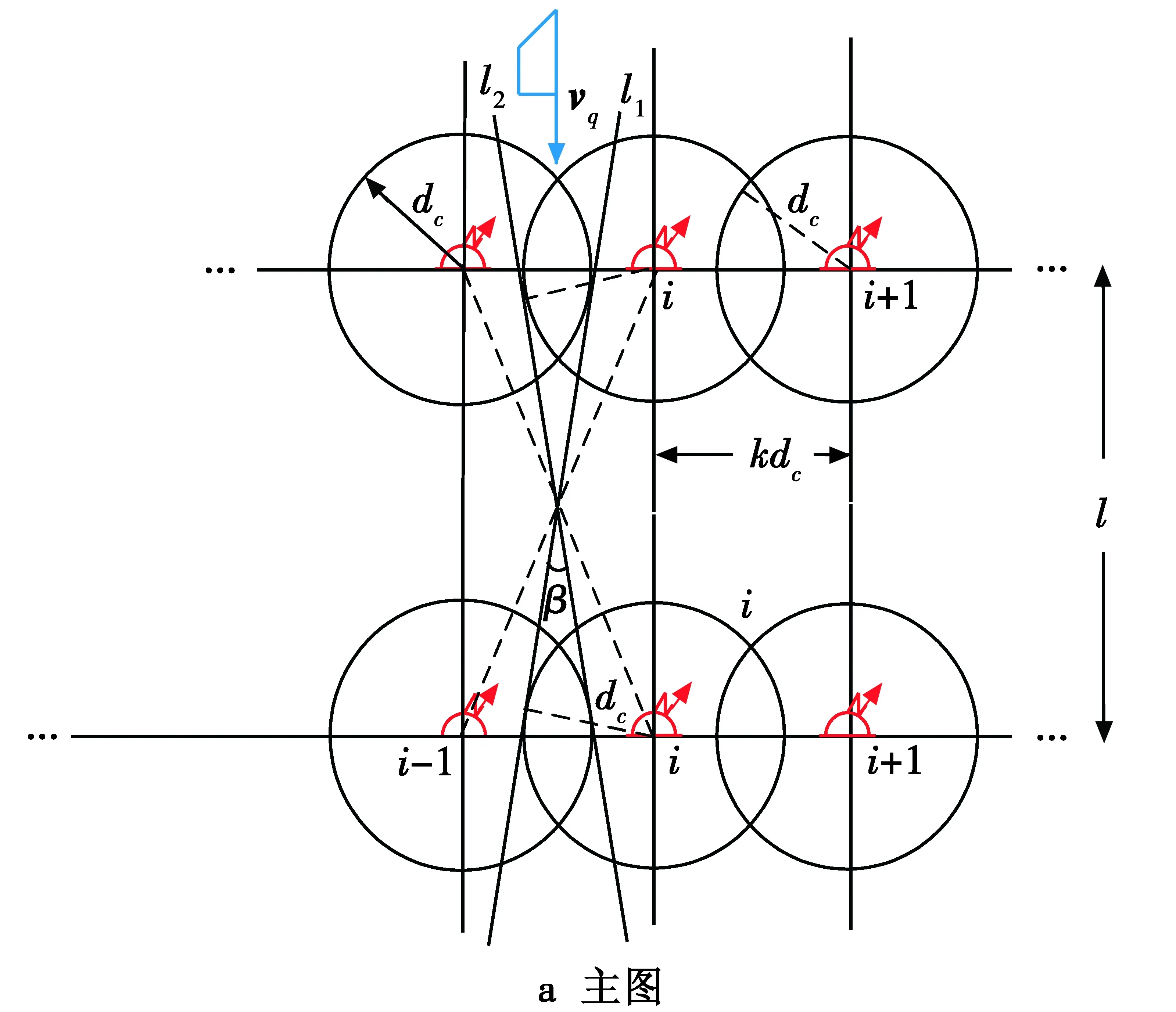
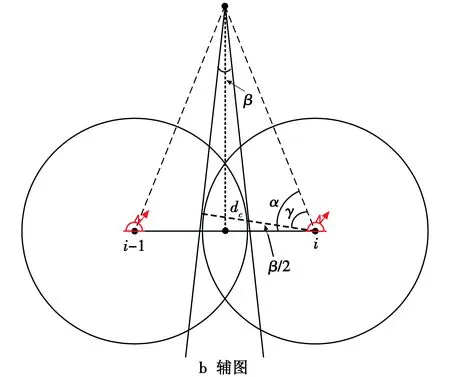
1.2 相邻两枚浮标同时得到接触
如图2所示,只有当1≤k≤2时,单列阵相邻两枚浮标同时得到接触的事件才可能发生。如第i枚和第i+1枚浮标同时发出信号,则敌潜艇可能的最大航行扇面角2φ由与第i+1枚浮标相切的l1和与第i枚浮标相切的l2之间的夹角决定,容易得出
φ=arccos(k/2) 1≤k≤2>。
(3)

图2 单列阵相邻两枚浮标同时得到接触时态势分析示意图Fig.2 Situation analysis of two adjacent sonobuoys in a single array obtaining contact simultaneously
2 复列阵得到接触态势分析模型
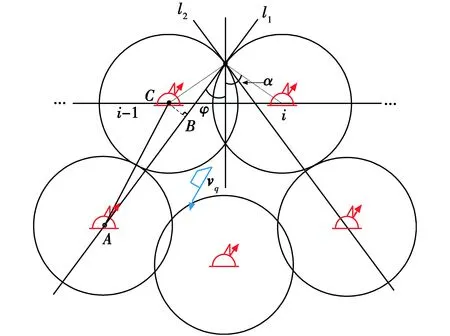
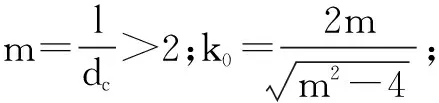
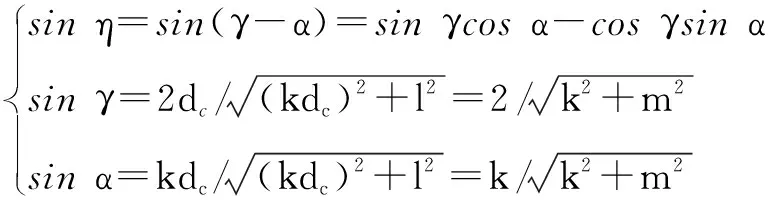
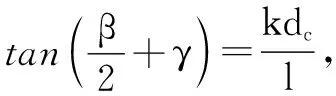
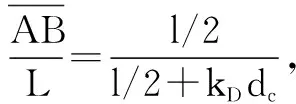
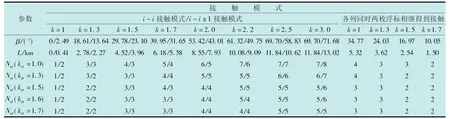
考察由两个单列阵组成的复列阵。设复列阵间距为l,2dc 复列阵中的两个单列阵各列单枚浮标相继得到接触时,可分为两种情况考虑:1) 各列中的第i枚浮标相继得到接触(称为i~i接触模式);2) 第1列中的第i枚浮标和第2列中的第i+1枚或第i-1枚浮标相继得到接触(称为i~i±1接触模式)。 2.1.1i~i接触模式 在i~i接触模式下,为便于研究问题,从1≤k≤2和k>2两种情况入手进行讨论。 2.1.1.1 1≤k≤2 由两个单列阵组成的复列阵中,如果第1列中的第i枚浮标和第2列中的第i枚浮标相继发出信号,当1≤k≤2时,有图3a所示的临界状态,即l1,l2分别与两列中的一枚浮标的有效探测范围圆相切,则敌潜艇可能的最大航行扇面角2φ为l1,l2之间的夹角。 由图3a不难得出 (4) 令l/dc=m,则有 (5) 因为 sinφ=sin(α+φ)cosα-cos(α+φ)sinα (6) 将式(5)代入式(6)并整理得 (7) 所以 (8) 2.1.1.2k>2 由两个单列阵组成的复列阵中,如果第1列中的第i枚浮标和第2列中的第i枚浮标相继发出信号,当k>2时,存在图3b所示的临界状态,即l1,l2分别与两列中的两枚浮标的有效探测范围圆相切。 由图3b不难得出 (9) 令l/dc=m,则有 (10) (11) sinφ=2/m >。 (12) 因为 sin(α+φ)=sinαcosφ+cosαsinφ (13) 将式(10)和式(12)代入式(13)并整理得 (14) (15) φ=arcsin(2/m) >。 (16) 图3 复列阵i~i接触模式态势分析示意图Fig.3 The i~i contact mode situation analysis diagram in a complex array 2.1.1.3 分析结论 综合上述分析,当复列阵间距满足l>2dc时,在i~i接触模式下有以下结论: 1) 当1≤k 2) 当k≥k0时,φ由式(16)确定。 2.1.2i~i±1接触模式 在i~i±1接触模式下,为便于研究问题,从1≤k≤2和k>2两种情况入手进行讨论,然后根据讨论结果得出综合结论。 2.1.2.1 1≤k≤2 由两个单列阵组成的复列阵中,如果第1列中的第i枚浮标和第2列中的第i+1枚或第i-1枚浮标相继得到接触,当1≤k≤2时,存在如图4a所示的临界状态,即l1,l2分别与两列中的一枚浮标的有效探测范围圆相切,则敌潜艇可能的最大航行扇面角β为l1,l2之间的夹角。 由图4a不难得出 (17) 令l/dc=m,代入式(17)并整理得 (18) 由于 cosβ=cos(α+β+γ)cos(α+γ)+ (19) 将式(18)变换代入式(19)并整理得 >。 (20) 要使式(20)有意义,必须满足k2+m2-4≥0,即 (21) 在复列阵中规定l>2dc[1],所以当l>2dc时式(21)成立。 2.1.2.2k>2 由两个单列阵组成的复列阵中,如果第1列中的第i枚浮标和第2列中的第i+1枚或第i-1枚浮标相继得到接触,当k>2时,有图4b所示的临界状态,即l1,l2分别与两列中的两枚浮标的有效探测范围圆相切,则敌潜艇可能的最大航行扇面角β为l1,l2之间的夹角。 图4 复列阵 i~i±1接触模式态势分析示意图Fig.4 The i~i±1 contact mode situation analysis diagram in a complex array 由图4b不难得出 (22) 令l/dc=m,代入式(22)并整理得 (23) (24) (25) 因为 (26) 将式(23)和式(25)代入式(26)并整理得 (27) (28) (29) 2.1.2.3 分析结论 综合上述分析,当复列阵间距满足l>2dc时,在i~i±1接触模式下有以下结论: 1) 当l>2dc,若1≤k≤2,β由式(20)确定; 复列阵中的两个单列阵各列同时两枚浮标相继得到接触的事件,只有当1≤k≤2时才可能发生。如图5a所示,第1列中的第i枚和第i-1枚浮标与第2列中的第i枚和第i-1枚浮标相继得到接触,即l1,l2分别与两列中的一枚浮标的有效探测范围圆相切,则敌潜艇可能的最大航行扇面角为l1,l2之间的夹角β。 从图5b不难得出 (30) 令l/dc=m,代入式(30)并整理得 (31) 因为 cosβ/2=cos(α-γ)=cosαcosγ+sinαsinγ (32) 将式(31)变换代入式(32)并整理得 (33) 要使式(33)有意义,必须满足k2+m2-4≥0,即 (34) 在复列阵中规定l>2dc[1],所以当l>2dc时,式(33)成立。 图5 复列阵各列同时两枚浮标相继得到接触态势分析示意图Fig.5 Situation analysis of two sonobuoys in each of two rows of the array when obtaining contact successively 通过上述态势分析可以看出:线列阵得到接触后,目标可能的运动航向范围是可以预测的,为了对接触进行识别,应当根据监听到浮标获得的信息,确定目标可能的运动航向范围,布设浮标阵进行拦截以便对目标进行正确识别和进一步确定目标的运动要素。 当反潜巡逻机记录到线列阵中1枚或数枚相邻浮标发出的信号时,对接触进行识别的有效方法应当是:基于发出信号的浮标,根据得到接触后的态势分析,在潜艇可能航行扇面内布设拦截型浮标阵。拦截型浮标阵的布设应当遵循如下原则: 1) 封闭性原则,即敌潜艇在可能航行扇面范围内任一个航向通过时,拦截阵能以较高的概率发现目标; 2) 适时性原则,即反潜巡逻机布设完拦截阵时,敌潜艇尚未穿越拦截阵。 为此,拦截阵的布设应当满足以下要求: 1) 拦截阵中浮标间距kσdc应当满足1≤kσ<2,具体值根据对发现概率的要求确定; 2) 拦截阵边缘上的浮标,应当布设在敌潜艇最大可能航行扇面的边缘线上; 3) 拦截阵与线列阵之间的距离D应当满足D=kDdc,kD∈[2,3]。 图6 借助浮标对接触识别示意图Fig.6 Contact identification by means of sonobuoys 如果拦截阵中的浮标发出信号(即与目标建立接触),则反潜巡逻机可确定潜艇位置和运动要素,通常情况下,可结束识别过程。 分两种情况进行讨论:1) 单列阵单枚浮标得到接触;2) 单列阵相邻两枚浮标同时得到接触。 3.1.1 单枚浮标得到接触 根据单列阵的结构,分k>2和1≤k≤2两种情况进行讨论。 3.1.1.1k>2 (35) 整理得 (36) 式中,「⎤表示向上取整。 3.1.1.2 1≤k≤2 (37) 弧型拦截阵浮标需求量Nσ为 >。 (38) 图7 弧型拦截阵布设示意图Fig.7 Schematic diagram of arc interceptor array layout 3.1.2 相邻两枚浮标同时得到接触 (39) 弧型拦截阵浮标需求量Nσ为 (40) 图8 相邻两枚浮标同时得到接触时弧型拦截阵布设示意图(1≤k≤2时)Fig.8 A schematic diagram of arc interceptor array layout when two adjacent sonobuoys obtaining contact simultaneously(1≤k≤2) 3.1.3 仿真计算与分析 仿真计算条件设置为:取kσ分别为1.0,1.3,1.5,1.6,1.7;声呐浮标有效作用距离dc=2 km。 从表1可以看出,在给定条件下: 1) 因为k=1和(或)kσ=1.0为临界条件,其数据不具代表性; 2) 单列阵单枚浮标得到接触,当1 3) 单列阵相邻两枚浮标同时得到接触时,通常应布设由3~5枚浮标构成的弧型拦截阵。 实际作战中,为尽量减少浮标消耗量,且保证线列阵以不小于0.5的概率发现目标,线列阵浮标间距通常应取1.5≤k≤2;拦截阵发现目标的概率应不小于线列阵发现目标的概率,所以拦截阵浮标间距通常应取1.5≤kσ<2。所以,单列阵单枚浮标得到接触,通常应布设由4~5枚浮标构成的弧型拦截阵;单列阵相邻两枚浮标同时得到接触时,通常应布设由3~4枚浮标构成的弧型拦截阵。 表1 单列阵得到接触时弧型拦截阵布设参数 分两种情况讨论:1) 复列阵中各列单枚浮标相继得到接触;2) 复列阵中各列同时两枚浮标相继得到接触。 3.2.1 各列单枚浮标相继得到接触 3.2.1.1i~i接触模式 根据拦截阵布设要求,在i~i接触模式下,线型拦截阵边缘上的浮标应布设在l1,l2上,其与复列阵第2列之间的距离为kDdc。参考图3a、图3b和图6b,以及i~i接触模式态势分析结论,不难得出在敌潜艇可能航行扇面2φ内,反潜巡逻机应布设的线型拦截阵的长度L、浮标需求量Nσ分别为 (41) 3.2.1.2i~i±1接触模式 根据拦截阵布设要求,在i~i±1接触模式下,线型拦截阵边缘上的浮标应布设在l1,l2上,其与复列阵第2列之间的距离为kDdc。 1) 1≤k≤2。 >。 (42) 令l/dc=m,代入式(42)并整理得 (43) 从图9a中不难得出 结合复列阵i~i±1接触模式得到接触后的态势分析结论,在1≤k≤2且m>2或1≤k L=(m/ 2+kD)·dc·(tan(β+η)-tanη) (44) 2)k>2。 (45) 令l/dc=m,代入式(45)并整理得 (46) (47) 结合复列阵i~i±1接触模式下得到接触后的态势分析结论,在k≥k0且m>4的情况下,反潜巡逻机应布设的线型拦截阵的长度L为 (48) 图9 i~i±1接触模式下线型拦截阵布设示意图Fig.9 Schematic diagram of linear interception array layout in the i~i±1 contact mode 3.2.2 各列同时两枚浮标相继得到接触 如图10所示,从图中不难得出 (49) (50) 将式(49)代入式(50)并整理得 (51) 将式(33)代入式(51)并整理得 (52) 综上可知,各列同时两枚浮标相继得到接触时,反潜巡逻机应布设的线型拦截阵的长度L为 (53) 线型拦截阵浮标需求量Nσ为 >。 (54) 图10 复列阵各两枚浮标相继得到接触时线型拦截阵布设示意图Fig.10 The layout of the linear interceptor array when two sonobuoys of complex array obtaining contact successively 3.2.3 仿真计算与分析 仿真计算条件设置为:当1≤k≤2时,取m=3.5;当k>2时,取m=4.5;kσ分别取1.0,1.3,1.5,1.6,1.7;kD=2.5;声呐浮标有效探测距离dc=2 km。 计算参数:各种条件下,敌潜艇可能的航行扇面角β、线型拦截阵长度L、浮标需求量Nσ,计算结果见表2。 表2 复列阵得到接触时线型拦截阵布设参数(kD=2.5) 从表2可以看出,在给定条件下: 1) 因为k=1和(或)kσ=1为临界条件,所以其数据不具代表性; 2) 复列阵相继一枚浮标得到接触,当1 3) 复列阵相继两枚浮标同时得到接触时,通常应布设由2~3枚浮标构成的线型拦截阵。 实际作战中,为尽量减少浮标消耗量,且保证线列阵以不小于0.5的概率发现目标,线列阵浮标间距通常应取1.5≤k≤2;拦截阵发现目标的概率应不小于线列阵发现目标的概率,所以拦截阵浮标间距通常应取1.5≤kσ<2。所以,复列阵相继一枚浮标得到接触时,通常应布设由3~4枚浮标构成的线型拦截阵;复列阵相继两枚浮标同时得到接触时,通常应布设由2枚浮标构成的线型拦截阵。 反潜巡逻机使用声呐浮标进行巡逻搜索,得到接触后借助浮标对接触进行识别时,当反潜巡逻机确认该接触为敌潜艇后:若在平时,应转入对潜跟踪;若在战时,应立即转入对潜攻击。如果敌采用艇群作战,则转入对潜跟踪或攻击的反潜巡逻机原先负责布设的浮标段,应转交由其他反潜巡逻机负责监听,此时,为了提高跟踪或毁伤敌潜艇的概率,可以使用空中待战的反潜巡逻机(如果有的话)。2.1 各列单枚浮标相继得到接触

sin(α+β+γ)sin(α+γ)

2.2 各列同时两枚浮标相继得到接触
3 借助浮标对接触识别方法

3.1 弧型拦截阵布设方法








3.2 线型拦截阵布设方法







4 结束语