基于卷积稀疏编码与多分类器融合的雷达HRRP目标识别方法
2018-11-09王彩云胡允侃李晓飞魏文怡赵焕玥
王彩云, 胡允侃, 李晓飞, 魏文怡, 赵焕玥
(1. 南京航空航天大学航天学院, 江苏 南京 210016; 2. 北京电子工程总体研究所, 北京 100854)
0 引 言
雷达高分辨距离像(high resolution range profile, HRRP)中包含着目标的位置、尺寸以及散射点分布等重要的结构信息。利用雷达HRRP信息实现目标的识别在雷达目标识别领域引起了研究者的广泛关注[1-2]。为了从雷达HRRP中得到丰富的特征信息并根据得到的特征信息实现目标的准确识别,许多研究者对HRRP的特征提取和分类方法做了研究。文献[3]提出了一种利用HHRP在不同流形结构上的特征进行稀疏重构的方法,实现目标的识别。文献[4]利用相邻HRRP之间的结构相似特性,提出了稳定字典学习算法。这些算法通过对HRRP的结构特征进行分析,物理信息丰富,计算容易。
文献[5]通过递归神经网络模型对HRRP的时域特征进行编码,并对隐藏特征进行权重分配,实现HRRP的目标识别。文献[6]在不同的方位角上利用无限制玻尔兹曼机对全局的特征信息进行提取,得到了较好的识别效果。文献[7]提出了判别式深度自动编码方法,对HRRP的高级特征和全局特征进行训练,在少量训练数据下实现较好的识别效果。利用不同的模型和学习算法对HRRP进行识别具有比较高的适应性,通过稀疏表示方法能够很大程度的减小运算量,提升HRRP目标识别的准确率。
性能优越的稀疏表示模型能够提升识别的准确率。文献[8]利用稀疏表示方法对HRRP进行投影,在Gabor字典中进行特征参数的提取并通过粒子群算法简化计算。文献[9]利用阶梯式线性调频脉冲信号进行采样,降低稀疏表示的复杂度并通过动态的感知矩阵实现目标的识别。文献[10]提出了一种多尺度核稀疏编码的分类方法,对HRRP的特征信息进行聚类并提升特征提取能力。文献[11]提出了一种快速自适应K-SVD字典学习算法,加快原子更新速度并降低计算复杂度,得到了较好的识别结果。
传统稀疏表示方法在特征分类上的方法比较简单,难以有效的对特征信息进行准确区分。针对这一问题, 本文提出了一种卷积稀疏编码与多分类器融合(convolutional sparse coding and multi-classifier fusion, CSCMF)方法,并利用该方法对雷达HRRP目标进行识别。首先通过CSC方法提取特征数据;然后通过MF的方法实现雷达目标的分类,得到识别结果。基于雷达HRRP数据的仿真实验验证了本文方法的有效性。
1 稀疏表示理论和分类方法简介
1.1 稀疏表示理论
稀疏表示方法在信号处理领域的应用是人们研究的热点。假设有样本信号Y∈Rm×n,Y=[y1,y2,…,yn],可以由一个线性方程组进行表示。即
Y=DX
(1)
式中,D是字典矩阵,D=[d1,d2,…,dp],D∈Rm×p;X是稀疏系数矩阵,X∈Rp×n,X=[x1,x2,…,xn]。在对稀疏表示方程进行稀疏求解时,可以转化为优化问题,优化方程可以表示为
.t. ‖xi‖0≤k
(2)
式中,i=1,2,…,n;k是稀疏度。
优化方程的求解可以分为稀疏编码和字典更新两个部分,一般将该问题转化为凸优化问题,采用贪婪算法或经典的字典学习算法进行求解。常见的求解算法有正交匹配追踪(orthogonal matching pursuit,OMP)算法[12]、K-SVD算法等。
1.2 分类方法简介
随着人工智能的发展,机器学习中的分类方法广泛地应用于图像去噪、人脸识别等领域中。常见分类方法有随机森林算法、朴素贝叶斯算法等。随机森林算法是通过决策树、随机子空间的组合实现多个子决策树的联合分类。假设利用随机森林算法进行分类时,分类器的数目是n个,这n个分类器分别为f1(x),f2(x),…,fn(x),待预测样本数据为x,样本类别为y。可以得到随机森林算法的泛化误差为
g=Px,y(mg(x,y)<0)
(3)
式中,P是一种投票的概率,mg(x,y)是边缘函数。随机森林中决策树的分类强度可以定义为
s=Ex,ymg(x,y)
(4)
泛化误差越小越好,分类强度越大,随机森林算法的分类性能越好。
朴素贝叶斯算法是在贝叶斯理论的基础上进行分类的,测试样本数据x的不同属性a1,a2,…,an,测试样本数据x的类别为y,则可以得到测试样本数据x属于某一类别的后验概率为

(5)
测试样本数据x属于某一类别的后验概率值最大,则样本就属于这一类别。可以得到预测类别y*的值为

(6)
朴素贝叶斯算法只需要很少的训练样本就可以实现目标的分类,且分类速度较快。
2 基于CSCMF的HRRP目标识别方法
2.1 CSCMF算法
CSCMF方法通过对表示方程进行最小化以实现字典更新的目的,CSC的表示方程为
s.t. ‖di‖2≤1 ∀i∈{1,2,…,n}
(7)
式中,xj,i是稀疏系数矩阵,j=1,2,…,m;yj是样本数据。通过不断地迭代最终得到最小化的xj,i和di。
利用CSC可以求得稀疏系数矩阵的X值,得到
(8)
令D=(d1,d2,…,dn),Y=(y1,y2,…,yn),X=(x1,x2,…,xn),可以得到
λ‖X‖1
(9)
通过交替方向法求解,可以得到
U(i+1)=U(i)+X(i+1)-Y(i+1)
(10)
式中,U为对应的对偶变量,化简可以得到
(DHD+ρI)X=DHX+ρ(Y-U)
(11)
在字典更新阶段,利用投影的方式对字典D进行求解。求解公式为
(12)
式中,T(di)的取值为
,i=1,2,…,n
(13)
CP的取值为
CP={x∈Rn:(I-P)*x=0,‖x‖2≤1}
(14)
利用OMP算法对式(12)进行求解,最终得到更新字典D。在对字典和稀疏系数进行求解的过程中可以得到重构误差为
(15)
将重构误差放入随机森林分类器中进行训练,并通过投票的方式得到具体的类别,分类的结果为
,θ)=z))
(16)
式中,z为已知的类别。利用朴素贝叶斯分类算法对重构误差进行分类,可以得到重构误差在某一类别下后验概率为

(17)
通过朴素贝叶斯分类器得到的分类结果为
(18)
利用最小值分类得到的分类结果为
(19)
采用多数投票法对3种分类器进行融合,具体融合方法如下:
z*=
(20)
基于CSCMF方法的目标识别流程如下:
输入参数:样本数据Y,初始字典D,最大迭代次数C。
输出结果:类别信息z*。
步骤1迭代次数t=1;
步骤2利用式(9)对稀疏系数X进行求解;
步骤3利用式(12)和OMP算法对字典D进行更新;
步骤4然后通过式(15)求得重构误差r;
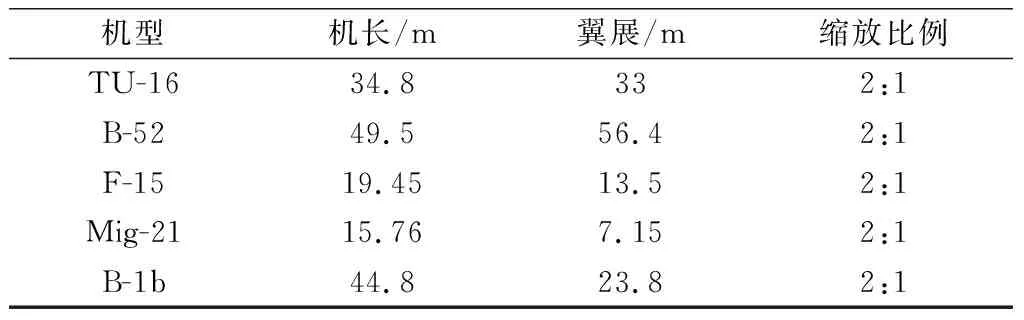
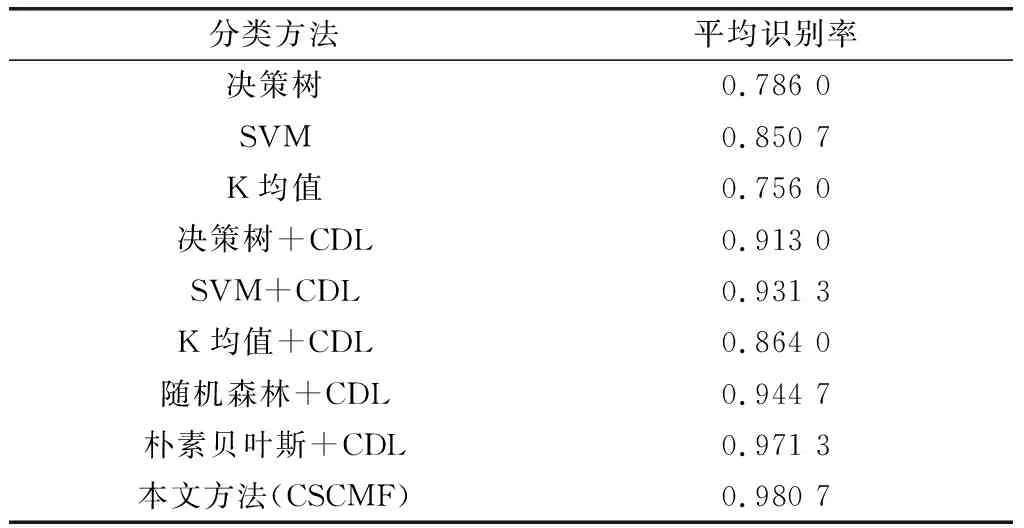
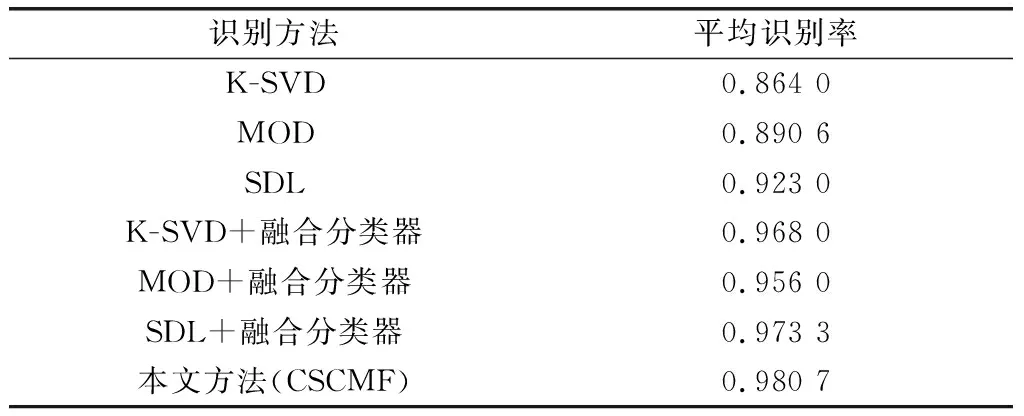
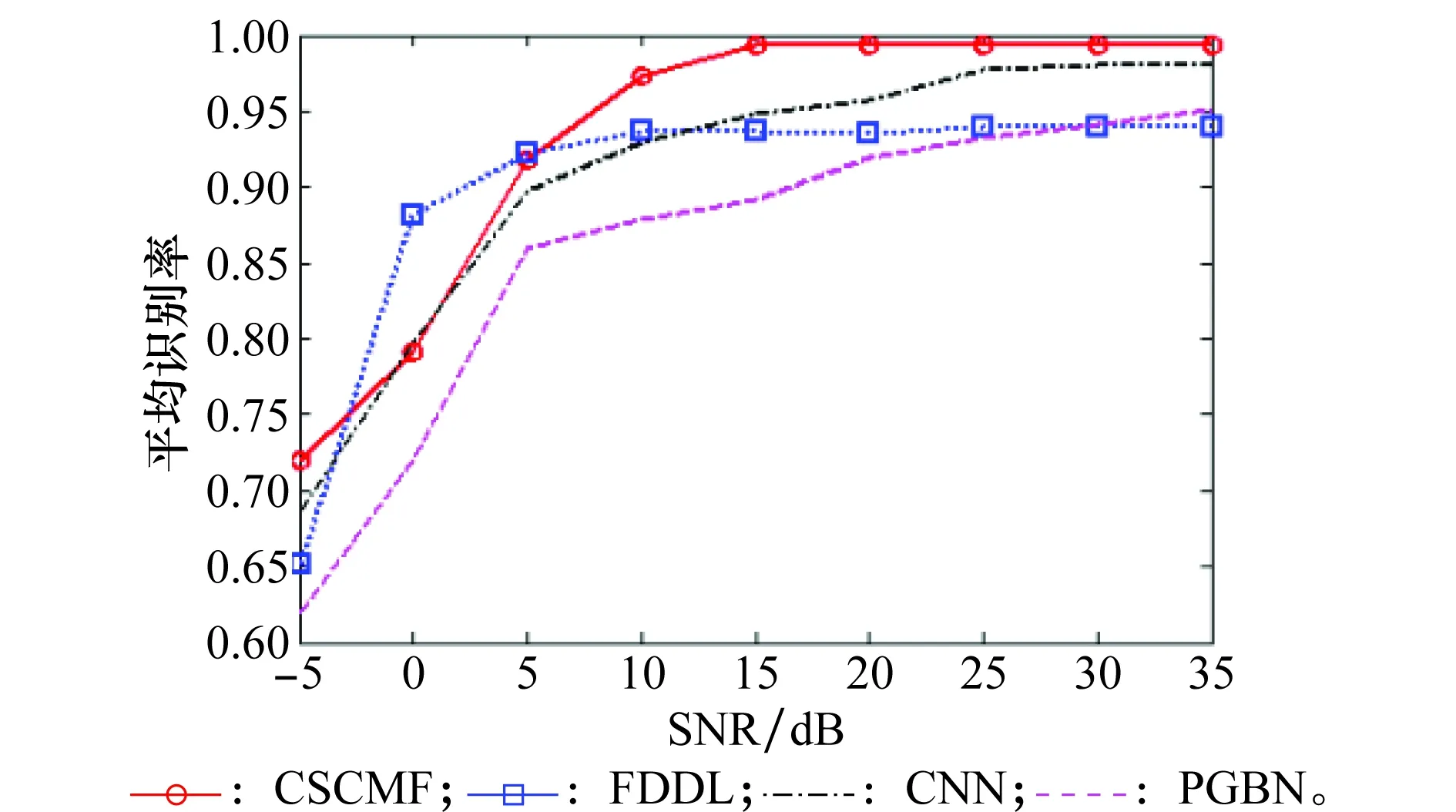
步骤5如果t 步骤6通过式(20)对重构误差进行分类; 步骤7得到分类结果z*;算法结束。 在HRRP的目标识别中,获得准确的特征信息并进行精确分类是识别的重要步骤。 本文利用CSCMF算法对HRRP目标进行识别,基于CSCMF的HRRP目标识别方法的具体步骤如下: 步骤1预处理阶段:对原始雷达HRRP数据进行去噪、归一化; 步骤2训练阶段:通过卷积稀疏编码方法求得训练样本数据的重构误差,然后用随机森林算法、朴素贝叶斯算法对重构误差进行训练,得到生长后的决策树和先验概率值; 步骤3测试阶段:对测试样本进行训练、学习,得到测试样本的重构误差,最后通过分类器融合方法得到最终的分类结果。 本文使用5类飞机目标TU-16, B-52, F-15, Mig-21, B-1b的一维高分辨距离像, 仿真数据来自于载频为10GHz的乌克兰的雷达后向散射特性仿真软件。雷达的具体参数和飞机目标的具体参数如表1、表2所示。 表1 雷达和飞机目标的参数 表2 飞机目标参数 5类飞机目标的仿真模型与真实的飞机之间的比例为2∶1,每一类飞机目标均有1 000幅一维高分辨距离像,每幅一维高分辨率一维距离像有600个采样点,距离门设置为70 m。在0°~60°的角度范围内,从每个目标中随机抽取300个样本,共1 500个样本作为测试样本;在0°~30°的角度范围内,从每个目标中随机抽取150个样本,共750个样本作为训练样本。 为了对本文识别方法的有效性进行验证,设计了4种不同的识别能力对比实验,分别测试了不同稀疏表示方法、不同分类方法、不同稀疏表示与分类器结合方法以及不同信噪比下识别方法的识别能力。 实验1分别比较5种稀疏表示模型的识别性能。除本文方法之外,其他4种稀疏表示方法分别为费舍尔判别字典学习(fisher discrimination dictionary learning,FDDL)算法[13]、压缩字典学习(compressive dictionary learning,CDL)算法[14]、盲压缩感知(blind compressed sensing,BCS)算法[15]以及核字典学习(kernel dictionary learning,KDL)算法[16],这4种稀疏表示方法的分类方式采用式(19)给出的分类方法。为了观察在噪声情况下的不同方法的识别性能,对测试样本加入信噪比(signal-to-noise ratio,SNR)为10 dB的高斯白噪声(white Gaussian noise,WGN),迭代20次。具体结果见表3所示。 表3 不同稀疏表示方法的识别性能比较 从表3可以看到,本文所使用的CSCMF算法对HRRP目标的识别能力较强,在所有的稀疏表示方法中识别率最高。由此可以见,本文所提方法具有较高的识别性能。 实验2分别对比9种不同识别方法的识别性能。除了本文方法,决策树算法、SVM算法、K均值算法等3种方法为经典机器学习分类算法,其他5种方法为单一分类器与卷积字典学习(convolutional dictionary learning,CDL)算法相结合的识别方法。实验中对测试样本加入SNR为10 dB的WGN,迭代20次。具体结果如表4所示。 表4 不同分类方法的识别性能比较 由表4可以看到,经典机器学习分类算法对HRRP目标的识别性能较低。分类器与卷积字典学习算法结合之后,实现了样本数据的稀疏性特征提取,有效地提高了识别性能。本文所提方法在所有识别方法中识别率最高,具有较好的识别性能。由此可见,单一的传统机器学习分类方法在对目标进行识别时受到的其他干扰较多,无法有效地对特征进行提取分类。分类器与卷积字典学习方法的结合可以有效提高分类精度,改善识别性能。本文方法在结合两种方法的基础上,得到了较好的识别效果。 实验3分别对比7种不同识别方法的识别性能,除本文方法之外,K-SVD算法、MOD算法、稳定字典学习(stable dictionary learning, SDL)算法[17]为字典学习方法,另外3种方法为字典学习算法与本文所提多分类器融合方法的结合。实验时对测试样本加入信噪比为10 dB的高斯白噪声,迭代次数为20次。具体结果如表5所示。 表5 不同方法的识别性能比较 由表4可以看到:本文所提方法在所有方法中识别率最高,识别性能比较好。字典学习方法在HRRP的识别中具有较好的识别能力,与多分类器融合方法的结合可以有效提高识别性能。多分类器融合方法增强了分类精度,提升了识别性能。 实验4比较4种不同识别方法在不同信噪比下的识别性能。这4种识别方法分别为本文算法、FDDL算法、卷积神经网络(convolutional neural network,CNN)算法、泊松伽玛信任网络(poisson gamma belief network,PGBN)算法[18],为了对不同算法进行有效比较,在实验过程中对测试样本加入SNR为-5~35 dB的WGN,迭代次数为50次,所有算法的初始稀疏度设置为3。具体结果如图1所示。 图1 不同SNR下算法的识别性能比较Fig.1 Performance comparison of algorithms with different SNR 由图1可以看到,4种算法的识别率均随SNR的增大而增大,最后均趋于稳定。本文所提CSCMF方法在SNR大于5 dB的情况下,识别性能优于其他算法,其识别精度最高可以达到0.99。由此可见,本文算法有效地结合了CSCMF方法的优势,改善了识别性能。在不同SNR下,本文方法均具有较好的识别能力,对噪声的鲁棒性较强,能够实现低SNR下的有效识别。本文算法有效地解决了稀疏表示方法分类精度不高的问题,提升了识别性能。 提出CSCMF方法用于雷达HRRP的识别。该方法通过CSC算法实现对样本数据进行稀疏化处理并得到特征信息,然后在多个分类器下进行分类并对分类信息融合。基于雷达HRRP数据下的实验结果表明,CSCMF方法有效地提高了识别性能,对噪声的鲁棒性也较好,基于该方法的雷达HRRP识别在上述数据集上平均识别率达到了98.07%。2.2 基于CSCMF的HRRP目标识别
3 实验结果与分析
3.1 实验数据介绍

3.2 实验结果分析
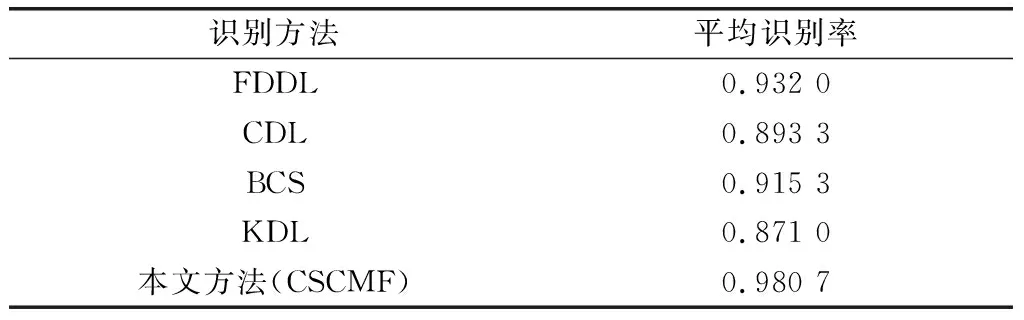
4 结 论
