基于蚁群算法分数阶PID控制器在温度控制系统的应用
2018-11-05刘智城杨向宇
刘智城,杨向宇
(华南理工大学 电力学院,广东 广州 510640)
0 引言
生物学家研究发现,蚂蚁在觅食过程中会留下一种分泌物,即信息素,也称外激素。蚂蚁在运动过程中能感知这种物质的存在及其浓度,并进行路径的选择,同时会在所经过的路径上释放信息素。信息素的浓度随时间慢慢挥发,因此在相同时间内,从巢穴到食物源所走的路径越短,信息素残留的浓度就越高,再次被蚂蚁选中的概率就越大。蚁群的集体行为构成了一种学习信息的正反馈机制,即通过个体之间的信息交流与相互协作最终找到最优解。蚁群算法包含两个基本阶段:适应阶段和协作阶段。在适应阶段,各候选解根据积累的信息不断调整自身结构。在协作阶段,候选解之间通过信息交流,以期望产生性能更好的解[1]。
在蚁群优化算法中,一个有限规模的人工蚂蚁群体,可以相互协作地搜索用于解决优化问题的较优解。每只蚂蚁根据问题所给的准则,从被选的初始状态出发,建立一个可行解,或是解的一个组成部分。在建立问题的解决方案时,每只蚂蚁都收集关于问题特征和自身行为规则的信息。蚂蚁既能独立工作,又能共同行动,显示了一种相互协作的行为。它们通过信息素进行信息的交换。每只人工蚂蚁都能够找到一个解,但很可能是较差解。蚁群的所有个体建立起很多不同的解决方案,再通过相互协作找出高质量的解[2]。人工蚂蚁并不试图完全模拟真实的蚂蚁,但其具有真实蚂蚁所没有的能力,如:人工蚂蚁有记忆所经历路径的能力;能够存储蚂蚁过去的信息,以便于携带有用的信息用于生成解决方案的优劣度,控制解决方案。例如,在TSP问题中,利用蚂蚁的记忆,可以将蚂蚁走过的城市置于一个禁忌表中,来禁止蚂蚁重复走过这些城市,进而满足TSP问题的约束条件[1][3]。
在基本蚁群算法中,人工蚂蚁的行为可以描述为:人工蚂蚁通过相互的协作,在所求问题的解中搜索可行解,人工蚂蚁按照人工信息素浓度的大小和基于问题的启发式信息,在问题空间移动来构造可行解。在此,信息素类似于一种分布时的长期记忆,这种记忆全局地分布于整个问题的解空间中。当人工蚂蚁在问题空间中移动时,在经过的路径上留下信息素,这些信息素反映了人工蚂蚁在问题空间觅食过程中的经历[4]。人工蚂蚁在解空间中逐步移动从而构造问题解,同时它们根据解的质量在其路径上留下相应的浓度信息素。蚁群中的其他蚂蚁倾向于沿着信息素浓度大的路径前进,同样蚂蚁在这些路径上留下自己的信息素,从而形成一种正反馈形式的强化学习机制,来指引蚁群找到高质量的问题解。蚁群算法还应包括另外一种机制,即信息素的挥发,蚂蚁走过路径上的信息素随着时间不断挥发,驱使蚂蚁搜索解空间中新的领域,避免求解过程过早地收敛于局部最优解[5]。蚁群算法必须有运行停止标准,即所求解达到预定的条件后,算法停止继续求解。流程图如图1所示,其中NC为迭代次数。
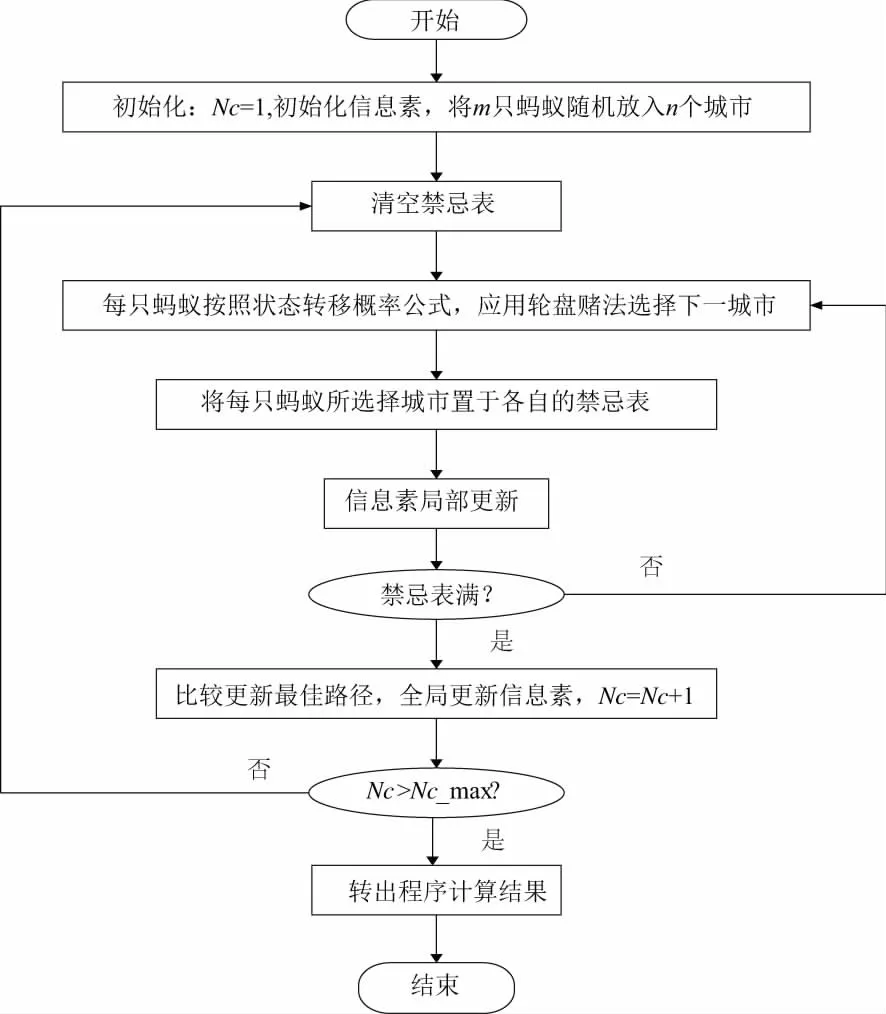
图1 基本蚁群算法流程图
1 蚁群算法PID控制器设计
PID控制器系统的原理图如图2所示。
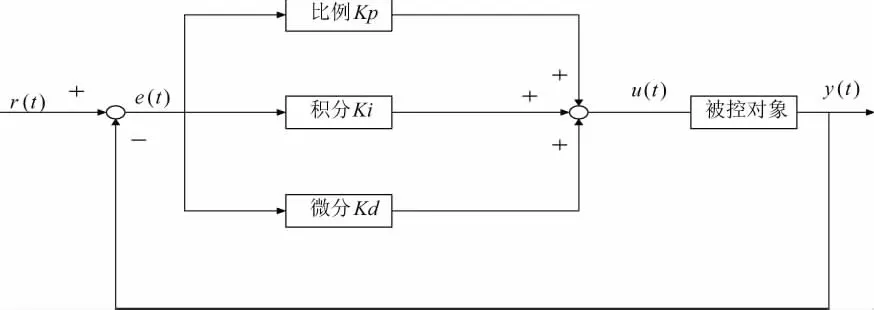
图2 PID控制原理图
其中:r(t)为输入量,u(t)为控制量,y(t)为输出量,e(t)为输入与输出之间的偏差量,即e(t)=r(t)-y(t)。连续时,控制量与偏差量满足:
(1)
离散时,控制量与偏差量满足如下差分方程和增量形式[1]:
(2)
(3)
式中:u(n)为本次控制量,e(n)为本次误差,TI为积分时间常数,TD为微分时间常数,Kp为比例系数,T为采样周期。
在采样周期已知的情况下,PID控制器只有3个参数需要确定,即:Kp、TI和TD,使某一控制性能达到最佳。
蚁群算法优化PID参数的过程:
(4)
一次遍历结束后,对每只蚂蚁走过的路径进行评价[6]。首先求得对应的解,求解式为:
(5)
xi=(xiH-xiL)ei+xiL
(6)

再求取相应的目标函数。然后记录下当前的最佳路径。接下来对各只蚂蚁所经历路径上的信息素进行更新,即:
(7)
为了加强最佳路径对蚂蚁行为的影响,需要对其信息素进行强化,即:
信息素更新完成后,进入下一次遍历,直到达到最大遍历次数NC为止。最后,输出在历次遍历过程中所选出的最佳路径所对应的解。
蚁群算法寻优简单,鲁棒性强,是一种效率很高的优化算法,它不依赖于数学模型,使处理问题更具有适应性、鲁棒性。
2 分数阶PID控制器设计
对于一些复杂的实际系统,用分数阶微积分建模要比整数阶模型更准确,对于分数阶模型则需要分数阶控制器来提高控制效果。分数阶PID控制器由于多了2个参数,增加了控制的灵活度,对于分数阶系统的控制具有较好的效果,且对于整数阶系统的控制,也具有一定的控制效果[7-8]。
整数阶PID 控制器的传递函数描述为:
(8)
式中:U(s)为控制器的输出;E(s)为控制器的误差输入。将式(8)中的微分和积分项的阶次推广到分数,即可得分数阶PID控制器的传递函数[2]。
(9)
式(9)中,当λ=μ=1时,Gf(s)就变为整数阶PID控制器的传递函数,因此整数阶PID控制器是分数阶PID控制器的特殊形式。分数阶PID所对应的时间域方程可以表示为:
u(t)=Kpe(t)+KiD-λe(t)+KdDμe(t)
(10)
式中D-λ、D-μ为分数阶微分算子。
从式(9)、式(10)可以看出,相比传统PID 3个参数的整定来说,分数阶PID控制器的整定参数有5个,比整数阶控制器多了2个自由度,即:微分器和积分器的阶次,因此分数阶PID更具有灵活性,能更加灵活的控制受控对象,可以得到更好的控制效果[9-10]。
3 仿真与实验
某真空感应炉温度控制系统为二阶惯性环节,其传递函数为:
其中:τ1、τ2为真空感应炉温度控制系统的时间常数,K为控制系统的比例系数。
当τ1=12s、τ2=10s、K=1 000时,其传递函数为:
为获取满意的控制效果,采用时间乘绝对误差积分准则(ITAE)作为目标函数,这种准则能反映控制系统的快速性和精确性,具有较小的超调量和较快的响应速度,即目标函数为:

式中,e(t)为系统误差,ts为SIMULINK仿真时间。
蚁群算法中使用的城市个数City=30,路径数Path=10,蚂蚁个数Antsize=40,信息素残留系数取ρ1=0.8,ρ2=1.0,总遍历次数取NC=20。
在应用蚁群算法进行优化时,为了避免所选取参数优化范围过大,考虑实际控制条件限制的前提下,先按经验选取一组较好的参数,然后再根据这组参数确定参数优化范围,利于节约计算量。本案例参数寻优范围为:KP∈[0,120]、KI∈[0,0.1]、Kd∈[0,0.1]、λ∈[0,1]、μ∈[0,1]。由于蚂蚁路径的选取是以随机概率选取的,因此每次运行的结果都不一样,有差异,可多运行几次,选取控制效果最好的一组参数作为寻优结果。
PID控制器优化参数为:KP=110.771 2、KI=0.038 35、Kd=0.011 844,最优参数所对应的目标函数值为:J=1.53×10-6。
分数阶PID控制器优化参数为:KP=119.927 5、KI=0.065 5、Kd=0.032,λ=0.462、μ=0.145 5,最优参数所对应的目标函数值为:J=1.229 3×10-6。
采用优化整定后的PID控制阶跃响应和分数阶PID控制阶跃响应对比图如图3所示。
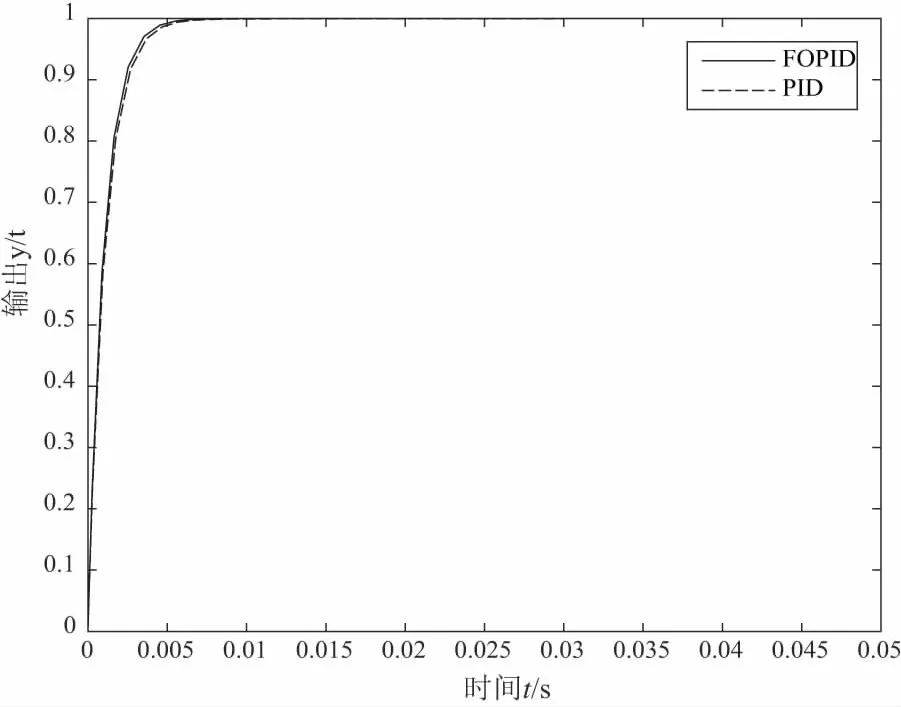
图3 PID控制和分数阶PID控制阶跃响应对比图
在0.025s~0.03s加入干扰信号后,采用优化整定后的PID控制阶跃响应和分数阶PID控制阶跃响应的对比图如图4所示。
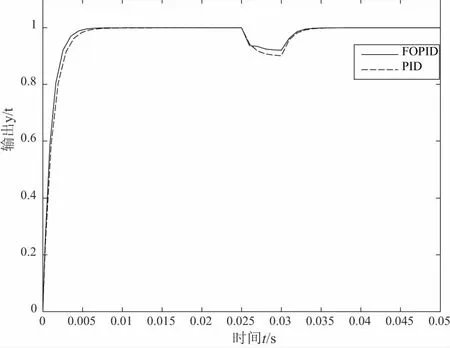
图4 干扰影响下的PID控制和分数阶PID控制阶跃响应对比图
由图3-图4可知(黑白印刷有疑问可咨询作者),基于蚁群算法优化后,PID控制阶跃响应无超调,调节时间短,响应速度快;相比PID控制,分数阶PID控制阶跃响应无超调,调节时间更短,响应速度更快,目标函数的值更小。有干扰的情况下,相比PID控制,分数阶PID控制的抗干扰能力更强,鲁棒性更好。
4 结语
通过仿真分析对比可知,基于蚁群算法优化的整数阶PID控制器比传统PID控制器具有更优的性能;基于蚁群算法优化的分数阶PID控制器相对于基于蚁群算法优化的整数阶PID控制器具有更短的调节时间,也没有超调,且响应速度更快。
