ITCS-K冗余结构车载系统架构分析
2018-10-22卡斯柯信号有限公司
周 欣 卡斯柯信号有限公司
1 引言
增强型列车控制系统 (ITCS,Incremental Train Controlsystem)是以车载信号作为列车运行的主体信号,将无线通信、GPS定位、虚拟闭塞等技术融为一体的列控系统。ITCS系统由车载设备、中心设备、轨旁设备三部分组成,三者之间通过数字通信网络平台实现数据交换。ITCS系统于1994年开始研发,1998年试运行,2000年正式投入商业运行,2005年引入到青藏线格拉段中运行。
ITCS系统利用既有ATP地面信号系统的电子设备监测线路中的状态,并将监测到的信息以无线通信的方式发给车载设备。车载设备对接收到的信息进行综合处理后,在人机交互单元上实时显示列车运行的各种参数。如果车载设备监测到列车超速,则立即触发惩罚性制动,使列车停车,从而保证行车安全。
2 ITCS列控系统适用范围及特点
ITCS列控系统取消了轨道电路、应答器等设备,使现场设备的数量大大减少,不仅降低了系统的初始投资,还降低了后期的运行维护费用及工人的工作量。与既有列控系统相比,ITCS系统在资源配置、系统功能、设备简化等方面具有最佳的性价比,适用于海拔高、气压低、环境恶劣等情况下的单线、低密度线路中。
ITCS列控系统能提高列车的运行时速,进而缩短列车运行的间隔,在保证行车安全的前提下实现旅客列车与货物列车及不同速度等级间的列车混跑。ITCS列控系统具有结构简单,可靠性高的优点,易于实现小站无人化管理;采用无线通信方案传输相关信息,提高抵御自然灾害的能力,具有较强的环境适应性;采用完善的差错控制技术和高精度经纬度计算方法,易于实现列车的精确定位,与国产计算机连锁系统有良好的兼容性。
3 ITCS-K型车载设备的系统架构
既有ITCS车载设备属于单套设备,当设备出现故障时会直接影响行车安全和行车效率。因此,需要在继承既有ITCS车载设备功能的前提下,增加多串口转换单元,并对其硬件架构及接口进行升级改造,使之成为具有冗余结构ITCS-K型双套车载设备。
ITCS-K型双套化车载设备主要由安全计算机(EuroVital Computer,EVC)、列车接口单元(Train Interface Unit,TIU)、车载数据记录单元 (Data Record Unit,DRU)、人机交互界面(Driver Machine Interface,DMI)、速度传感器、加速度传感器、多串口转换单元(RIOM)、组合导航模块(GNSSIMU)及天线、卫星导航模块(GNSS)、列尾装置 (Head of Train Controller,HOTC)等部分组成,其结构如图1所示。

图1 车载系统的架构图
3.1 EVC
EVC是作为车载设备的核心控制单元,上电后能以一定的周期从速度传感器、加速度传感器、RIOM等单元获取相应的信息。在此基础上,根据机车类型、列车类型等参数进行运算,生成动态的速度监控曲线,并在DMI上显示该曲线。司机根据动态速度监控曲线行车,必要时可自动输出惩罚性制动,确保行车安全。
3.2 DMI
DMI是司机与车载设备之间的交互接口,采用Profibus总线与EVC进行数据交换。在发车测试和完整性测试过程中,可通过DMI将机车类型、列车类型、车长等必要的参数输入到EVC中;在列车运行过程中,以文本、语音、图形等方式向司机显示列车当前速度、允许速度、目标距离、报警信息等内容。DMI显示的内容应遵守《CTCS-2/3级列控车载设备人机界面(DMI)显示暂行规范》(铁总运[2014]30号)中的规定。
3.3 TIU
TIU作为EVC和列车之间的接口单元,由不同的继电器组成。列车在运行过程中,EVC可通过TIR单元将相应的控制命令传给列车单元,同时,列车运行时的状态信息可通过TIR单元传送给EVC。
3.4 速度传感器
速度传感器一般安装在列车的非动力轴上,可将车轮转动的线速度转为相应频率的电信号,然后输送给EVC。为了ITCS系统的可靠性,一般需要采用两个速度传感器。
3.5 加速度传感器
加速度传感器安装在机柜底部的合适位置,用来测量列车的加速度。当列车加速度出现异常时,EVC需要对列车的速度做相应的处理。当列车处于加速阶段,如果加速度超过最大可能加速度时,则EVC认为列车出现空转现象,此时速度传感器需要输出补偿后的速度;当列车处于减速阶段,如果减速度超过最大可能减速度,则EVC认为列车出现打滑现象,此时速度传感器需要输出补偿后的速度。
3.6 数据记录单元
为分析记录车载设备的运行状态及司机驾车的过程,需用DRU记录车载设备运行时的各种参数,主要包括车载设备的工作模式及状态、车载设备与地面设备之间的交互信息、以及司机的操作等信息。DRU与EVC通过Profibus总线进行数据交换。
3.7 RIOM单元
RIOM用于实现与HOTC、GNSSIMU、GNSS等设备的串口通信功能。同时,RIOM将接收的GNSSIMU信息按照相应的通信协议进行重新组合,发送给EVC中的SDMU单元。
4 ITCS-K型车载设备的特点
4.1 EVC
既有车载中的车载计算机采用2取2的架构,任一通道出现故障,会立刻宕机,从而导致列车停车。而在ITCS-K型车载设备中,EVC采用3取2的设计架构(每个通道软硬件结构完全相同,3个通道间具有互相监控以及失效通道隔离的功能),通道间通过交换数据和输入信号的软件表决实现同步功能,输出进行3取2的硬件表决,数据处理过程如图2所示。如果任意一个通道发生故障,而其余两个通道的输出结果一致,EVC在低可用性下继续工作,从而使列车继续正常行驶,不同情况下,EVC的工作情况如表1所示。
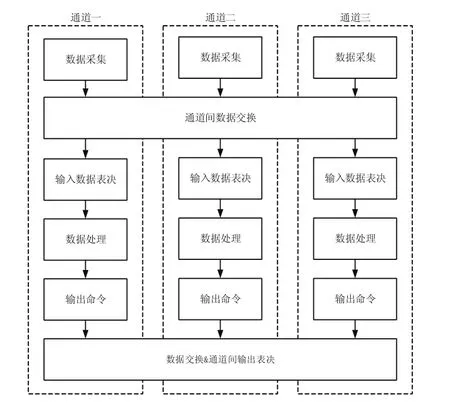
图2 EVC数据处理过程示意图
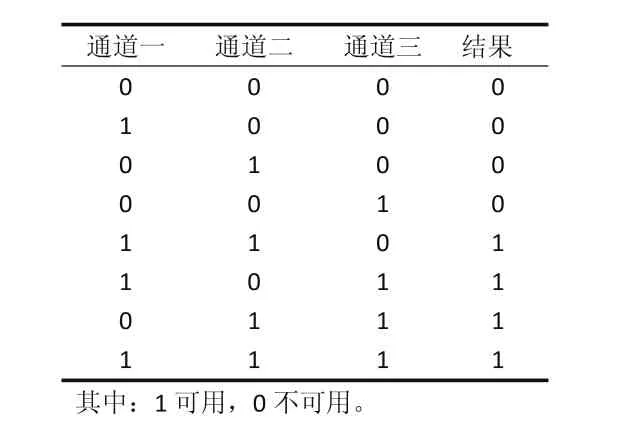
表1 不同情况下EVC的工作情况
4.2 RIOM
ITCS-K车载设备默认使用RIOM-A进行串口通信,而RIOM-B为备用设备。因此,RIOM具有冗余结构,使单套车载设备升级为双套车载设备。当RIOM-A出现故障时,通过FILIO板自动切换到RIOM-B。车载设备在工作过程中,EVC以3s为周期检测RIOM心跳帧。如果任意周期内未检测到RIOM的心跳帧,则认为该RIOM发生故障。车载设备上电后要检测EVC是否与RIOM建立通信,在一定时间内是否收到HOTC、GNSS、GNSSIMU和EMRM的信息。RIOM切换及工作流程如图3所示。
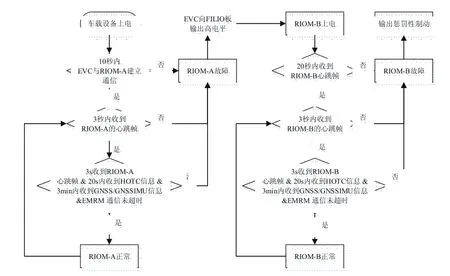
图3 RIOM工作流程图
4.3 DMI
既有ITCS车载设备采用紧凑型机车显示器(LCD)作为人机交互单元,数据输入比较麻烦,显示内容及信息相对简单,且每次发车测试时均需要对LCD进行检测。在ITCS-K型车载系统中,采用基于带GEODE处理器的单机版个人电脑作为人机交互单元,通过19个实体短程按键输入相关数据,采用10.4吋液晶显示屏(CLD)显示丰富的内容及信息,且发车测试过程中不需要做DMI检测。
4.4 DRU
既有ITCS车载设备的运行状态记录在CMU中,仅能以文本形式显示。而ITCS-K型车载的数据则记录在独立的数据记录单元DRU中,符合EN50155的标准,后期数据处理时能采用可视化数据分析软件。
5 结束语
本文介绍了ITCS系统的适用范围及特点,在此基础上重点介绍了ITCS-K型车载设备的系统架构,以及车载设备与既有设备的区别。与既有ITCS车载设备相比,ITCS-K型车载设备具有如下优点:(1)采用具有3取2功能的EVC,提高了车载设备的可靠性。(2)采用DMI作为人机交互界面单元,可以简化数据的输入过程,显示更加丰富信息。(3)具有冗余结构的RIOM使既有车载设备升级为双套ITCS-K车载设备。(4)DRU极大方便了后续数据的分析与处理。
