磁悬浮-气囊主被动混合隔振器力学特性及主动隔振实验研究
2018-10-20马建国帅长庚
马建国,帅长庚,李 彦
(1.海军工程大学 振动噪声研究所,武汉 430033;2.船舶振动噪声重点实验室,武汉 430033)

主被动混合隔振既能够实现宽频线谱的振动,也能够很好的消除突出的低频线谱,对提高舰船的隐身性能具有重大的意义,近年来国内外在理论和工程实践中取得了大量的研究成果[3-5]。Fuller等[6]对振动的主动控制进行了系统研究。范威[7]建立了主动隔振系统的数学模型,并利用PID控制方法分别对速度反馈、加速度反馈和力反馈进行了理论与仿真;陈绍青[8]对电磁式主被动复合隔振器及其控制算法的研究;张攀[9]对船用柴油发电机组进行了主动控制研究;安峰岩等[10]对非线性自适应算法进行了深入研究。本文利用磁悬浮作动器可以与气囊隔振器并联构成主被动混合隔振器,由气囊隔振器承载设备重量的同时隔离宽频线谱振动,磁悬浮作动器根据控制指令输出主动控制力,具有低功耗、承载能力大等优点,对主被动隔振技术的工程实用化具有重要意义。
本文主要对磁悬浮主被动混合隔振器进行了理论建模与主动输出力瞬态仿真,并设计了工装夹具,对混合隔振器进行了动态输出力的实验研究。本文首次利用下层动态传递力作为主动控制误差信号,并基于Fx-Newton算法,在主被动混合隔振平台上进行了主动控制实验,实验取得了良好的力与加速度线谱的控制效果,为进一步深入研究振动的主动控制提供了新的途径。
1 主被动混合隔振平台系统理论建模与分析
1.1 主被动混合隔振平台理论建模
以如图1所示的主被动混合隔振平台进行低频线谱主动控制的研究。台架主要由激振器,上层质量块,中间质量块,下层基座组成。激振器通过螺钉与上层质量块刚性连接,用来模拟设备的振动,上层质量块由4个主被动混合隔振器支撑,在主被动混合隔振器与中间质量块之间安装有力传感器,中间质量块与下层基座之间由橡胶隔振器相连,最大限度的减少外界对实验结果的影响。取上层质量块加速度传感器信号作为主动控制的参考信号,取混合隔振器与中间质量块之间的力传感器信号作为误差信号。混合隔振器下方4个力传感器用来获得上层质量块传递至中层质量块的力的大小,在其旁边安装有加速度传感器,来测量下层的振级大小。在理论分析过程中,气囊隔振器与橡胶隔振器分别用弹簧与阻尼器代替,作动器用主动控制力代替。
设上层质量块与中层质量块的质量分别为M1,M2,位移分别为x1,x2,磁悬浮-气囊主被动混合隔振器与橡胶隔振器的刚度分别为Ks,Kr,阻尼分别为Cs,Cr,F与fc分别为上层激振器的输出力与主动隔振器的输出的主动控制力,在忽略扭转、横摇等运动,仅考虑垂向振动时,由此可以建立主被动混合隔振平台的动力学方程如下
(1)
Ks(x2-x1)=fc
(2)
由式(1)与式(2)可知,主动控制力在整个系统中起着决定性的作用,磁悬浮-气囊隔振器作为混合隔振元件,其输出主动控制力的性能指标决定着混合隔振的成功与否。
1.2 主动输出力计算与瞬态仿真
如图2所示,为磁悬浮-气囊混合隔振器的结构图,将磁悬浮作动器集成到气囊隔振器中,具有占用空间少、实用化程度高等优点,其中磁悬浮作动器用来输出主动控制力,主要由衔铁、永磁体、铁芯、线圈组成。忽略铁芯、衔铁的磁阻及漏磁,设作动器铁芯两边的面积之和与中间面积分别为S1、S2,永磁体的矫顽力和剩磁分别为Hc、Br,其等效永磁势分别为Gm1、Gm2,磁通量为Ф,空气的磁导率为μ0,铁芯与衔铁之间的距离为zt,线圈的匝数为N,控制电流为i,根据磁路欧姆定律可得
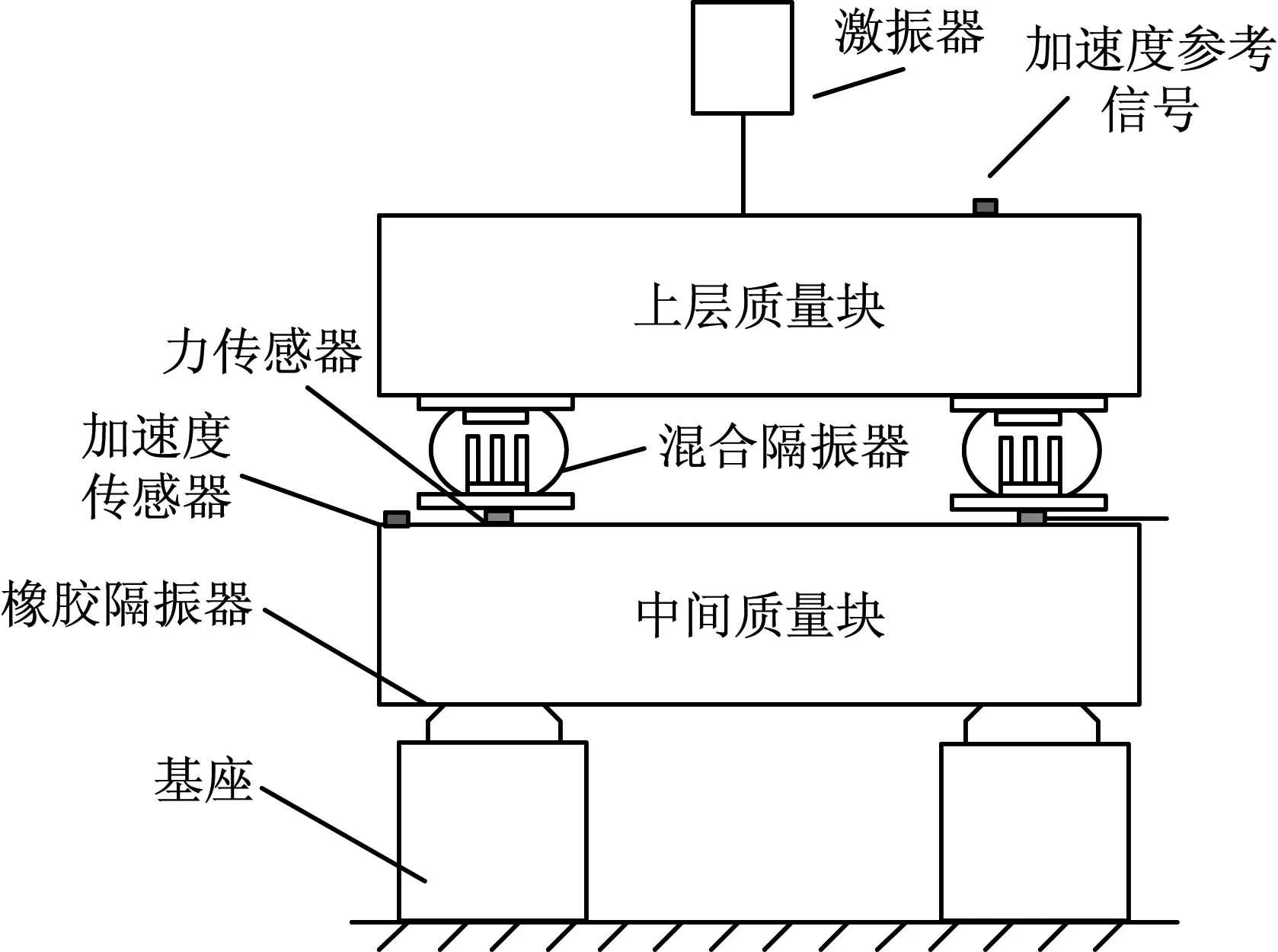
图1 主动控制平台连接图Fig.1 The connection diagram of active control experimental platform
Gm1+Gm2+Ni
(3)
设两边铁芯与中间铁芯的磁感应强度分别为B1和B2,则可得
Φ=B1S1=B2S2
(4)
由于铁芯对衔铁的力与正对面积及气隙处的磁感应强度平方成正比,则
(5)
由式(1)、(2)、(3)可得
(6)
由式(6)可知,作动器的主动输出力与控制电流i的大小具有复杂的非线性,很难用解析的方法准确的得到磁悬浮作动器输出力的大小。

图2 磁悬浮-气囊混合隔振器结构图Fig.2 The structure diagram of hybrid vibration isolator
利用Ansoft Maxwell软件能够较方便的对混合隔振器中的磁悬浮作动器进行主动输出力静态和瞬态仿真。余锡文等[11]已经对磁悬浮作动器进行了结构与静态力的优化仿真。与静态力仿真相比,对作动器进行瞬态输出力仿真计算,能够更准确的得到作动器的动态输出力特性,为作动器的设计优化、隔振器的装配等提供更准确的指导。本文利用Ansoft Maxwell有限元软件对作动器进行建模,并经过赋予各部分材料属性、设置边界条件等步骤之后,给线圈通入大小为6 A,频率为120 Hz的交流控制电流,计算作动器在0.2 s时间内的动态力输出,采样频率为1 000 Hz。如图3所示,为作动器分别在0.02 s和0.06 s时的磁通密度的分布情况。在0.02 s时,电磁势与永磁势方向相同,磁通密度分布云图如图3(a)所示;在0.06 s时,电磁势与永磁势方向相反,磁通密度分布云图如图3(b)所示。

(a) 在0.02 s时(b) 在0.06 s时
图3 不同时刻作动器磁通密度分布
Fig.3 Magnetic flux density distribution of actuator in different time
如图4所示为有限元仿真瞬态主动输出力与实验结果的对比,有限元仿真的结果能够与实验结果较好的吻合,这就为作动器的设计优化提供了很大的便利。
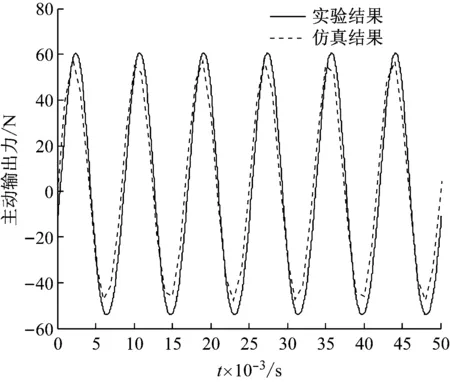
图4 作动器瞬态输出力与电流关系Fig.4 The relationship between transient output force and current
1.3 混合隔振器主动输出力实验
将作动器集成到气囊隔振中,主动输出力需要经过抗冲击悬挂结构、气囊的上盖板等机械元件才能将主动输出力传递到被控设备[12],在力传递的过程中难免会造成力的输出延迟、相位失真等情况,故单独对作动器进行仿真与测力显然无法完全满足混合隔振系统设计的需求,这就需要直接对混合隔振器进行测力实验。
实验前将混合隔振器与测力夹具固定在MTS实验机上,将气囊调整至额定高度,并给气囊充气,直到气囊压力达到10 kN时停止充气,本实验选用ICP201B04型力传感器,该传感器的频率响应范围为0.001~90 kHz,宽频分辨率(1~10 kHz)为0.088 96 N-rms,能够满足对主动控制力进行实时测量的需求。整个测力装配实物图如图5所示。实验过程中用B&k设备采集混合隔振器的动态输出力、功率放大器的指令电流和线圈两端的电压差值。实验流程框图如图6所示。在确定好混合隔振器的安装状态后,测量混合隔振器在42个不同工况下主动控制力的输出,具体工况如表1所示。

图5 实验实物图Fig.5 The real object of output force experiment

图6 实验框图Fig.6 The schematic diagram for test device
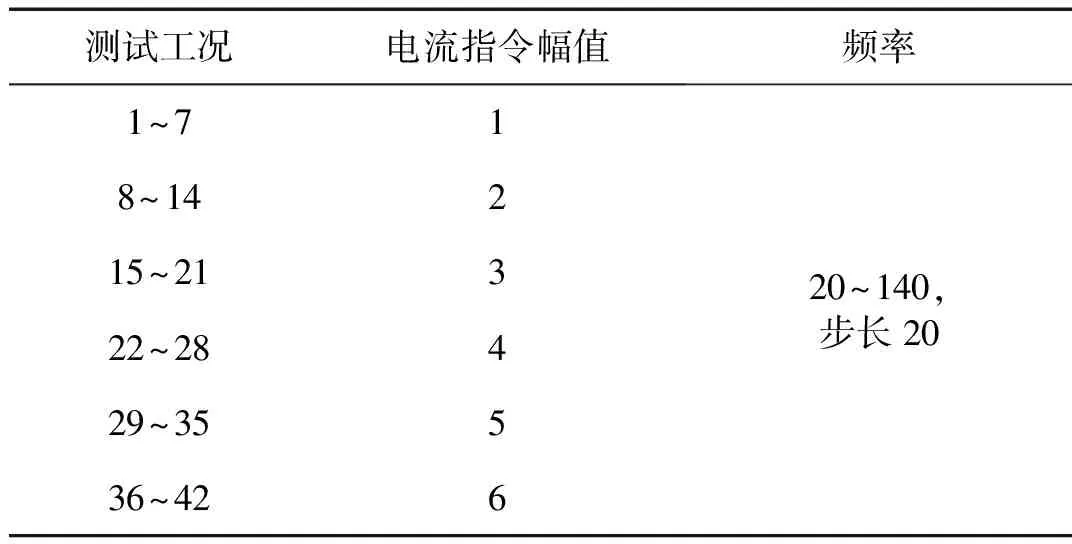
表1 测试工况表Tab.1 The working condition for testing
如图7所示,当电流峰值在6 A时,主被动混合隔振器能够输出大于130 N的交变电磁力。图8为力/电流幅值放大倍数,由图8可知,主被动混合隔振器的幅值放大倍数一致性很好,且具有平坦的幅频特性。图9为混合隔振器输出力的波形失真度(除主频与二倍频以外的线谱能量与总的线谱能量之比),由图可知混合隔振器输出力波形失真度小,在通入6 A电流时的波形失真度均小于8%。图10为混合隔振器输出力的非线性,由图中可知混合隔振器在100 Hz以内其输出力的基波与二倍频幅值落差都在30 dB以上,具有很小的非线性。主动隔振的功耗对其实用化有很大影响,由图11可知,混合隔振器的功耗很小,即使在6 A、140 Hz的工况下其功耗也仅为21.49 W。

图7 混合隔振器输出力Fig.7 Output force of hybrid isolator
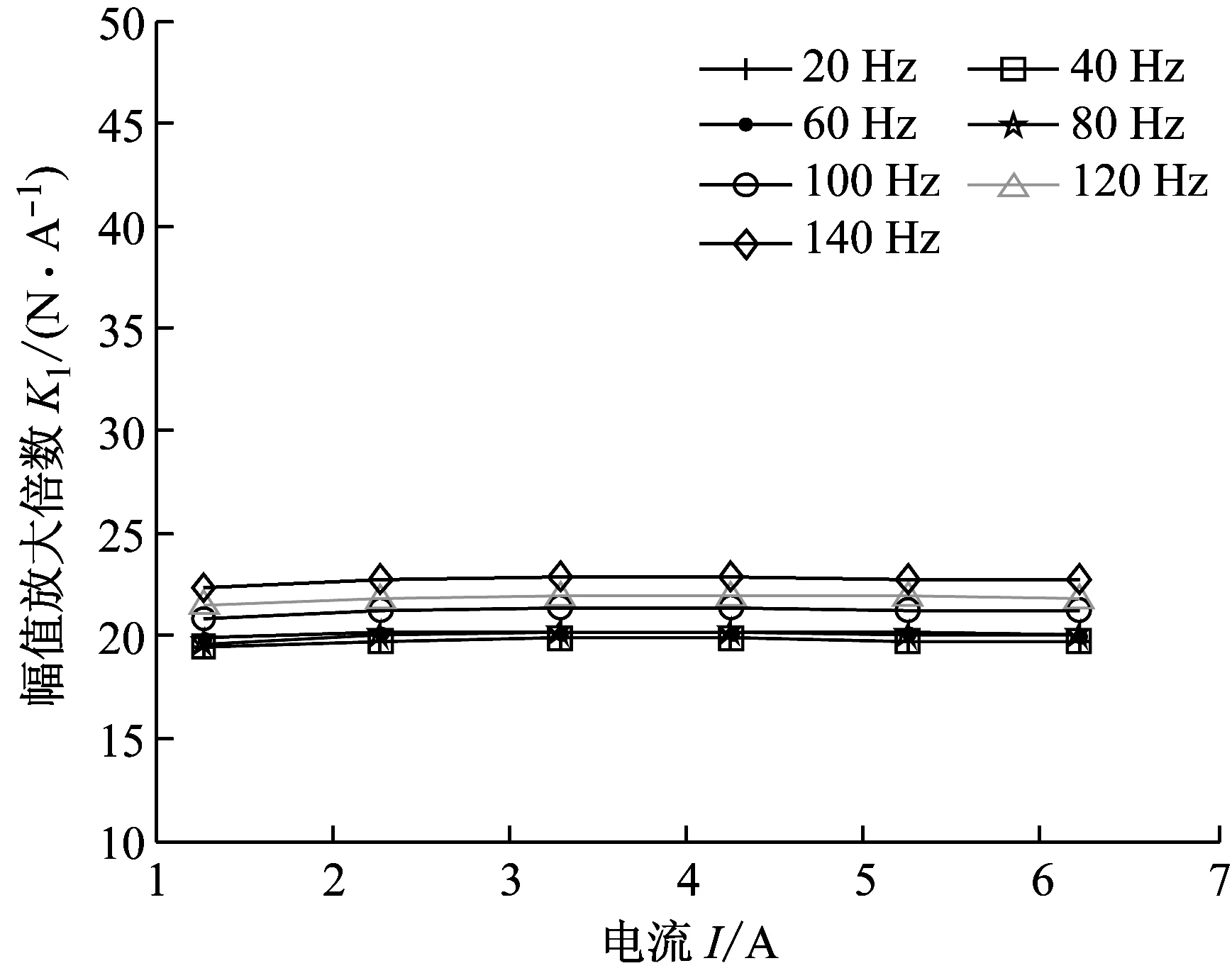
图8 力/电流幅值放大倍数Fig.8 Fundamental output force vs current
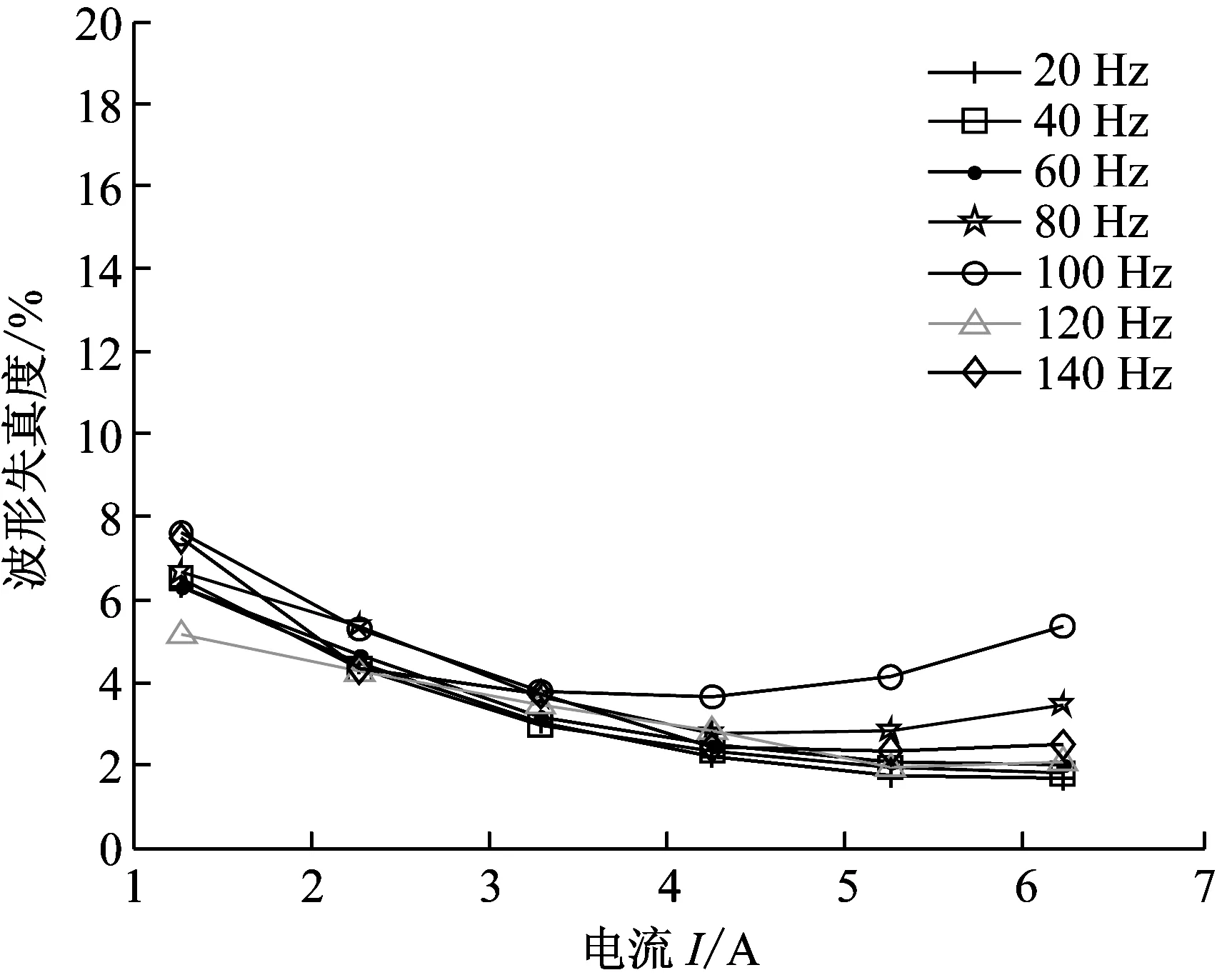
图9 力波形失真度Fig.9 The distortion of output force

图10 力二次谐波与基波幅值落差Fig.10 Energy difference between second and fundamental component

图11 混合隔振器功耗Fig.11 Power consumption of hybrid isolator
2 多通道Fx-Newton算法
自适应滤波器是一类结构和参数可以改变或调整的递推估计器。它能够在输入信号的统计特性未知时,或者输入信号的统计特性变化时,能够自己调整自己的权系数,从而能够寻找到误差曲面的底部。Fx-LMS算法(即Filter-x Least Mean Square,滤波参考信号最小均方算法)是目前应用最广泛的算法。但是由于Fx-LMS算法的次级通道矩阵分散度大,收敛速度和稳定性会受到很大影响。Newton算法在进行控制器权值调整时,不仅使用了梯度估计,还使用了梯度导数,使其收敛速度远远快于LMS算法。
对于线性定常系统,可以用频响函数反映该系统对不同频率输入信号的响应特性。线性系统的各频率分量相互正交,可不失一般地只分析单频情况,单通道系统频响为一个复数,而对于具有L个作动器和L个传感器的多通道系统,次级通道频响可用复数方阵S表示,其第k行第l列复元素Skl对应第l路控制信号至第k路误差信号的次级通道,控制器频响可用L阶复数向量W表示,其复元素Wl对应第l个控制器。
对于频率为ω的线谱信号,可设参考信号x(n)=Xejωn,扰动信号d(n)=Dejωn,误差信号e(n)=Eejωn,控制信号y(n)=Yejωn,其中X为复数,D、E、Y为L阶复数向量,则有
Y=WX
(7)
E=D+SY=D+SWX
(8)
自适应控制算法的性能函数为
(9)
将式(8)代入式(9)展开可得
X*WHSHSWX)
(10)
式中:上标H和*分别表示共轭转置和共轭。
而性能函数J相对于控制器频响W的复梯度向量g为
(11)
式中:WR和WI分别为W的实部值和虚部值,为实数向量。
将式(10)代入式(11)展开可得
X*SH(D+SWX)=
SHX*E
(12)
而梯度向量g相对于W的一阶导数g′为
g′=SHX*SX
(13)
因此Fx-Newton算法的频域迭代公式为
(14)

由式(8)可知,最优控制系数为
(15)
当W→Wopt,E→0,即误差信号为0。
可得Fx-Newton算法迭代公式有
W(n+1)-Wopt=

(16)
由式(15)、(16)可得算法收敛的充要条件为
(17)

由式(17)可得,控制算法存在收敛可能性的充要条件为
(18)
若式(18)得到满足,只要找到足够小的收敛步长μ,即可使控制算法收敛,如果不满足式(18),则无论收敛步长μ取何值,都无法使控制算法收敛。如图12为2通道时Fx-Netwon算法原理框图。
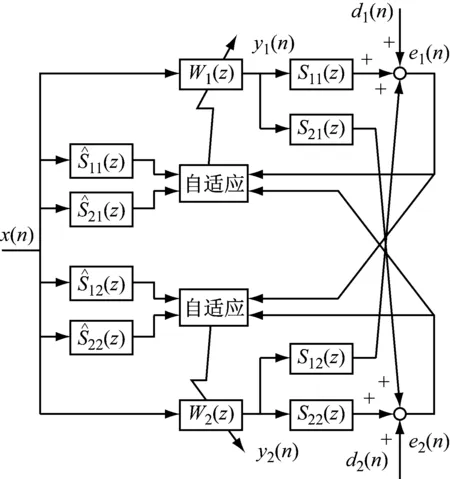
图12 多通道Fx-Netwon算法原理框图Fig.12 The schematic diagram of the Fx-Newton alogrithm with multichannel
3 主动控制实验
搭建的以力为误差信号下的低频线谱主动控制实验台架如图13所示,表2为混合隔振平台的物理参数。在主动控制前,首先进行系统次级通道的离线辨识,按顺序通过控制器分别给控制平台下方的四个混合隔振器通入辨识指令电流,并通过混合隔振器下方的力传感器采集混合隔振器输出的主动控制力,并将数据传送至控制中进行次级通道的离线辨识,进而计算出次级通道频响复数方阵S。
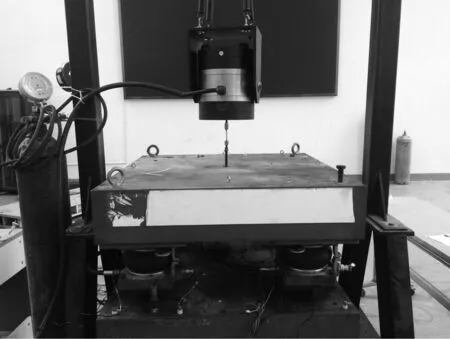
图13 主动控制平台实物图Fig.13 The real object of active control experimental platform
旋转机械在工作时,可以激励出宽频振动及多根线谱振动,特征线谱的频率与其转速有关。在实验过程中用激振器模拟旋转机械的振动,并选取具有代表性的23 Hz单频激励和25~75 Hz组合的多频激励两个工况进行实验研究。用下层传递力作为主动控制的误差信号,控制算法在10 s之后开启。用B&K动态采集仪采集各通道加速度、力和电流值。

表2 混合隔振平台参数Tab.2 Parameters of hybrid vibration isolation platform
表3为四个力传感器和下层8个加速度传感器在特征频谱处平均振级的衰减情况,由表可以得出在单频激励时,控制前后力衰减量在23 Hz处最多可达50.36 dB,取其中一个力传感器测点绘制其控制前后的时域波形如图14所示,力振动幅值在控制开启后迅速减小,绘制其频谱图如图17所示,可以得出在控制后主频23 Hz力的幅值明显减小。通过分析主动控制前后主动控制平台中间质量块其中一路的加速度传感器的数据,可得其时域波形如图15所示,其功率谱密度如图18所示,控制前后加速度幅值也明显减小。图16为在控制前后其中一个主被动混合隔振器中电流的时域图,在主动控制开启后,电流单峰幅值大约为0.88 A,说明在主动控制时,作动器的功耗很小。在主频为25 Hz与75 Hz的叠加信号时,四个力传感器和下层8个加速度传感器在特征频谱处平均振级的衰减情况如表4所示。取其中一路的力传感器与加速度传感器数据分析结果如图19与20所示。由图与表中数据可得,在多频激励下混合隔振系统也取得了不错的控制效果。

表3 单频23 Hz主动控制效果Tab.3 Experimental results-active vibration control at 23 Hz
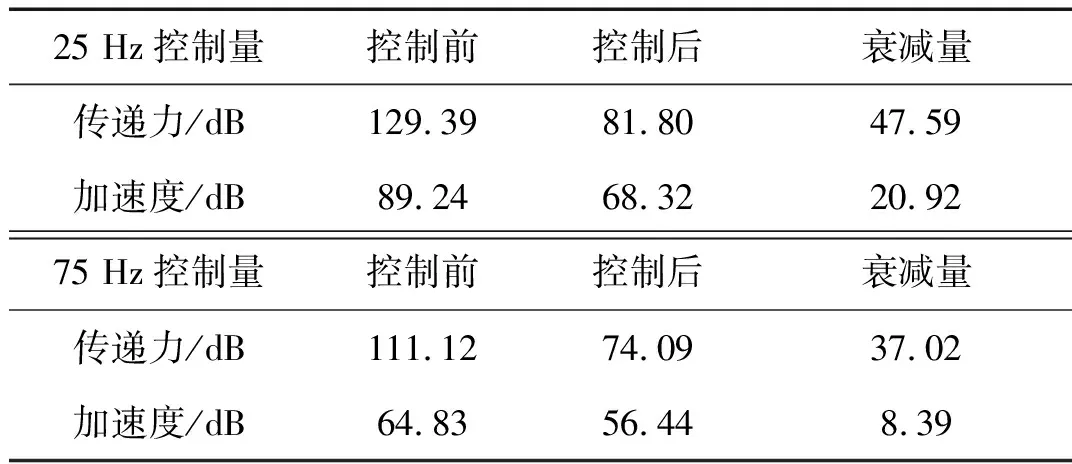
表4 25~75 Hz主动控制效果Tab.4 Experimental results-active vibration

图14 主频23 Hz误差测点力时域波形Fig.14 The time series of error signal when control vibration at 23 Hz
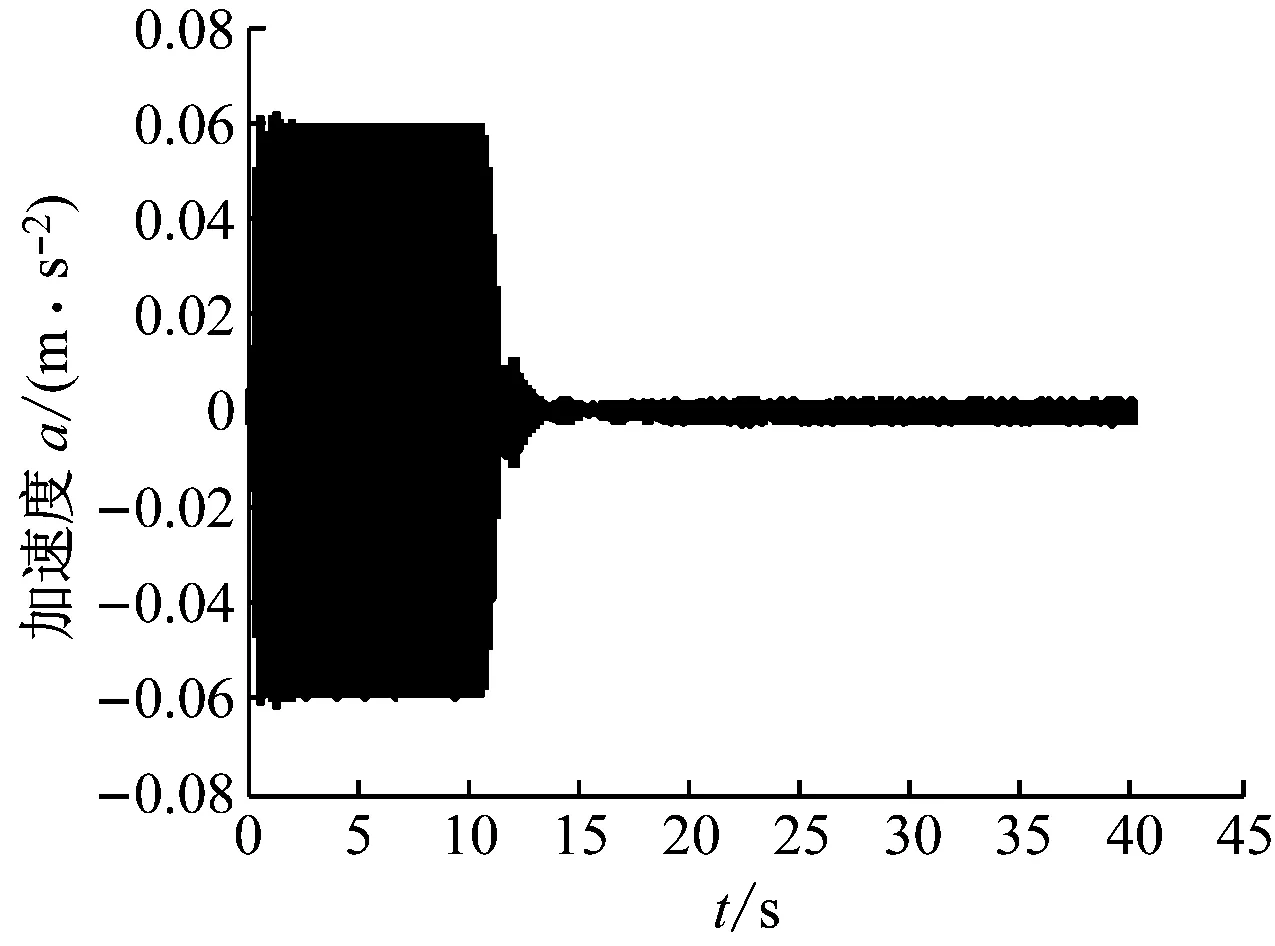
图15 主频23 Hz加速度测点时域波形Fig.15 The time series of acceleration signal when control vibration at 23 Hz
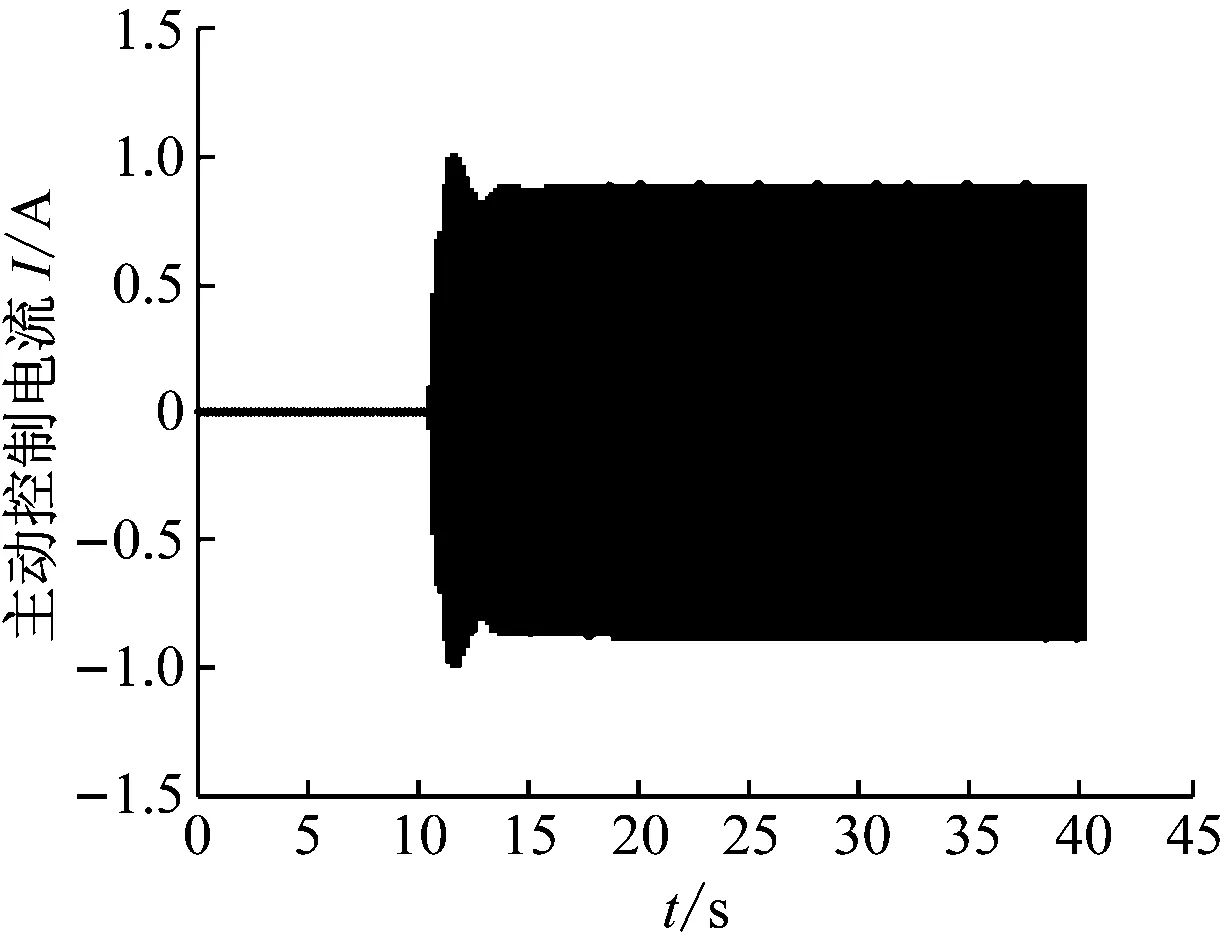
图16 主频23 Hz控制电流时域波形Fig.16 The time series of control current signal when control vibration at 23 Hz

图17 主频23 Hz主动控制前后误差测点力频谱Fig.17 The spectrum of error signal at 23 Hz before and after control
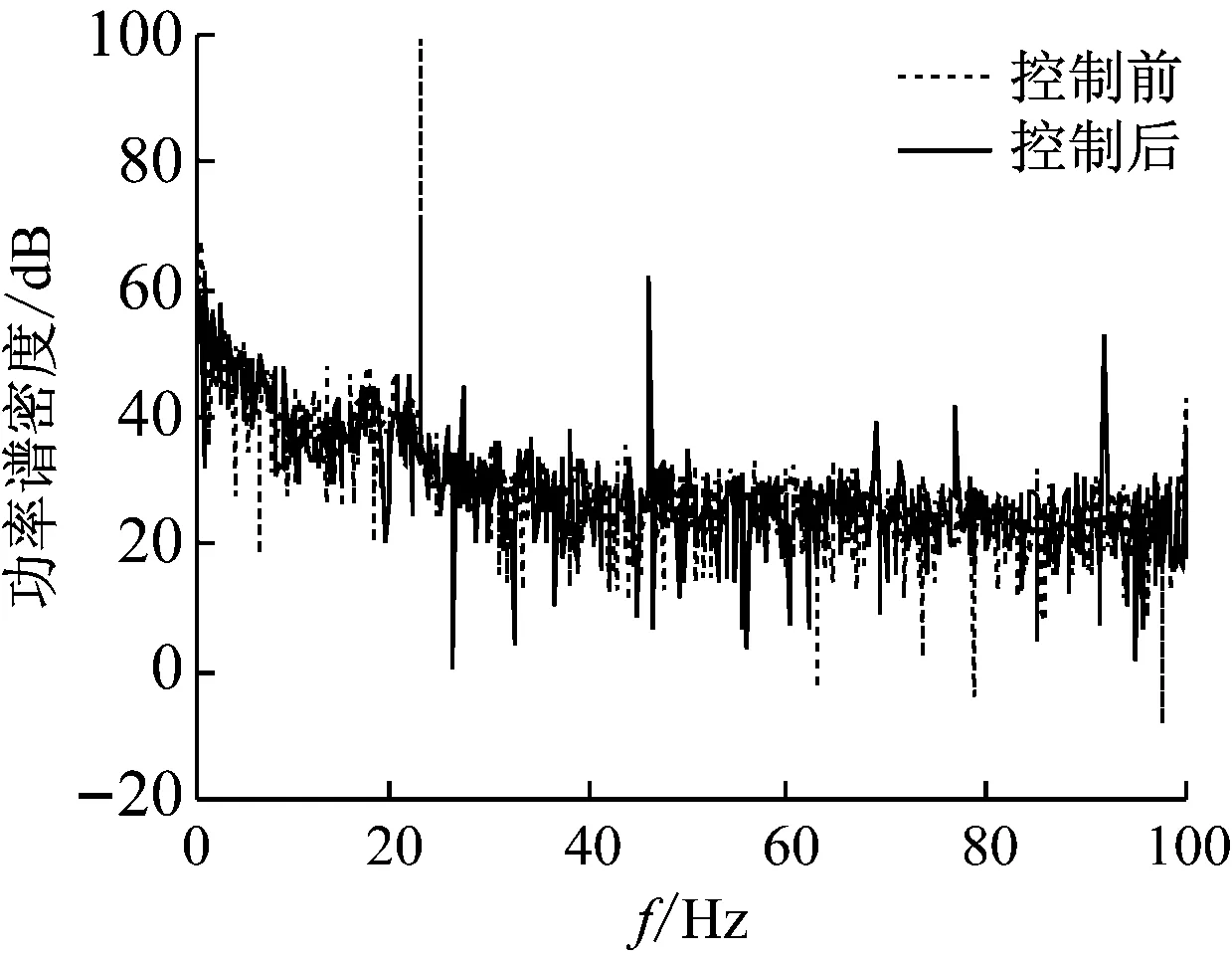
图18 主频23 Hz主动控制前后加速度测点功率谱Fig.18 The power spectral density of acceleration signal at 23 Hz before and after control
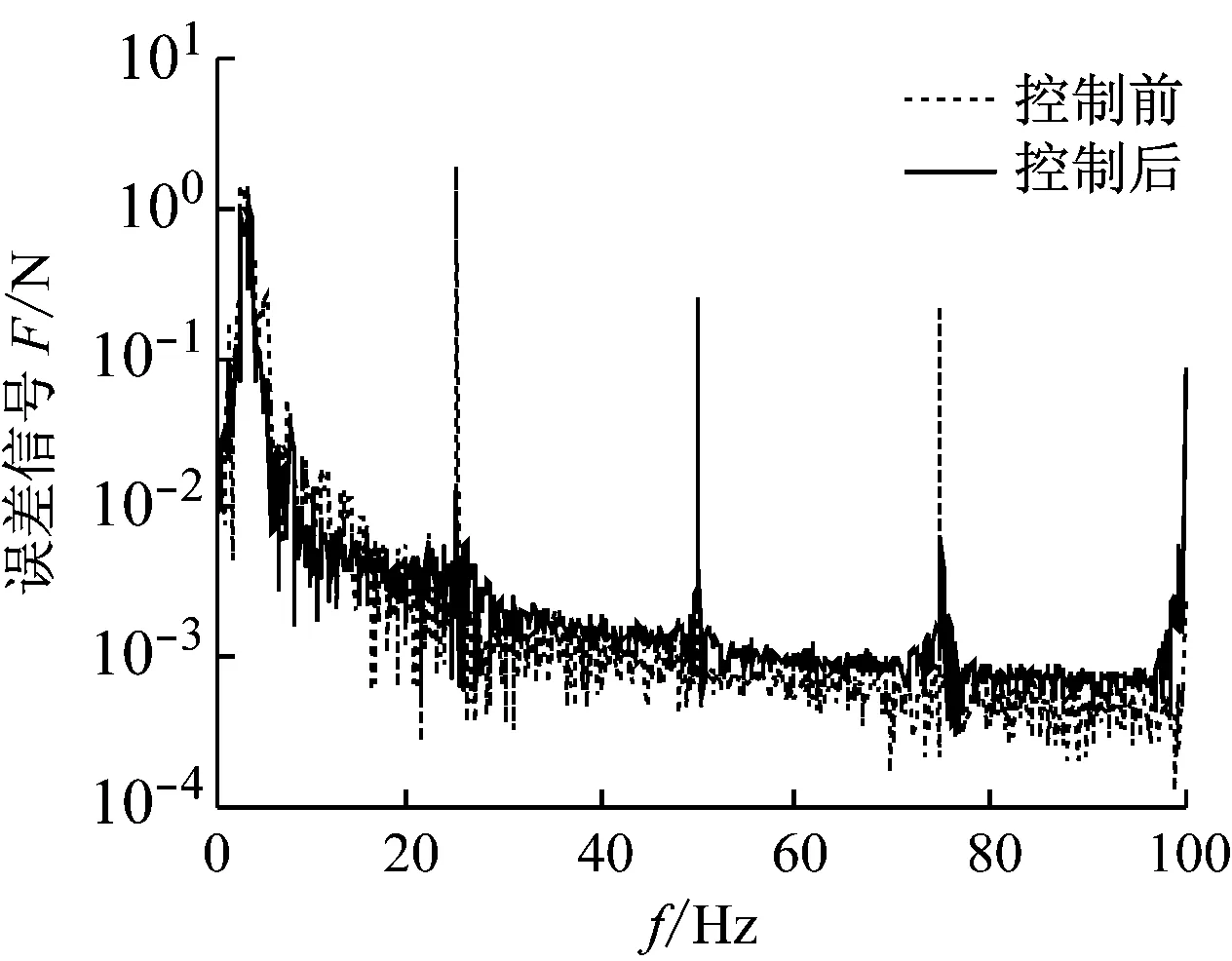
图19 主频25~75 Hz主动控制前后误差测点力频谱Fig.19 The spectrum of error signal at 25—75 Hz before and after control

图20 主频25~75 Hz主动控制前后加速度测点功率谱Fig.20 The power spectral density of acceleration signal at 25—75 Hz before and after control
由表5可知,混合隔振装置开启后,中层质量块在宽频上加速度的总振级与上下层之间传递力的总能量都得到了有效的控制。实验结果说明了主动控制开启后,不仅控制住了特征频谱的振动,同时也增强了宽频隔振效果。
4 结 论
本文对磁悬浮-气囊混合隔振器进行了理论建模、实验与仿真,在此基础上并对混合隔振器进行了动力学实验,结果表明混合隔振器的力学输出性能好,能够满足主动控制的要求。在此基础上提出了一种基于力作为误差信号的主动控制方法,并且利用Fx-Newton主动控制算法,在搭建的混合隔振平台上进行了主动控制实验,实验结果表明:以上层和中层质量块之间的动态传递力作为主动控制误差信号能够成功控制动态传递力的线谱,并且对下层加速度振动线谱也能够实现控制。
表5各工况控制前后宽频隔振效果(10~8000Hz)
Tab.5Thebroadbandvibrationisolationeffect(10—8000Hz)atvariousworkingconditionsbeforeandaftercontrol

23 Hz单频控制控制量控制前控制后衰减量传递力/dB107.7187.0220.69加速度/dB91.8371.4220.4125~75Hz多频控制控制量控制前控制后衰减量传递力/dB106.9495.9710.97加速度/dB86.6976.0910.60
