基于行为驱动的战能感知方程
2018-10-15张东俊王维平
张东俊, 张 涛, 黎 潇, 王维平
(1. 中国人民解放军92337部队, 辽宁 大连 116023; 2. 国防科技大学系统工程学院, 湖南 长沙 410073)
0 引 言
作战实验是通过探索作战的因果关系以深入认知战争规律和指导规律的研究活动,可为武器装备快速发展和作战运用提供有力支撑[1-2]。作战实验运用是包含多种学科门类的新兴交叉领域,其重难点问题之一是如何科学动态地表达作战进程、作战效果,以有效解析武器装备、作战运用等与作战效果之间的因果关系[3-6]。
传统的指标分析方法是静态孤立的,难以反应随着作战进程的推进,装备能力随作战行为连续动态变化以及各能力之间所存在的关联制约关系。对于交战结果与交战进程呈强相关的作战类型,需要对作战进程中的行为以及其引起的作战能力的变化进行深入分析。因此在这里引入作战能量的观点,将作战过程看作是战能积蓄-感知-传递-转化的过程。通过能谱来描述作战行为驱动下装备作战能力的实时动态响应,以反映作战实验推演中装备(装备+人)各能力的动态变化和相互影响,从而有效分析评估某些关键行为或行为方案对作战结果的影响。
战能感知是作战实体通过各种途径获取战场当前状态以及通过处理分析判断出战场变化趋势的过程,即通过对“态”的感知,给出“势”的判断[7-8]。战能感知既是战能环中的逻辑起点,同时蕴含于战能环的整个过程,对于战能环的发起和运转起着至关重要的作用。
本文在作战行为谱的基础上深入研究影响战能感知的主被动因素,构建基于行为驱动的战能感知方程,表征装备能力随作战进程发展所体现出的实时性和动态性,通过将战能感知方程应用于作战行为决策的优化控制,实现基于作战过程的多阶段多目标动态优化。
1 作战行为谱与战能环
定义1作战行为谱是作战体系或系统开展作战活动而采取的一套标准的、有意义的作战行为集合。
定义2能谱是用以表示作战体系或系统各作战能量分量所处状态及由作战行为引起的战能变化关系的量,与目标状态、作战环境、时空关系相关。可表示为
E=g(SB,SR,H,K)
(1)
式中,SB为蓝方作战体系或系统;SR为红方作战体系或系统;H为作战环境;K为作战实体与目标之间的时间和空间关系。
定义3势谱是描述作战实体的当前能谱在某种作战态势下对一定对手所具备作战潜能的量,与作战行为密切相关,受作战行为驱动,是战能优化控制的工具,可表示为
ξ=f(E,C)
(2)
式中,C为作战行为。
定义4战能环是以“观察-判断-决策-行动(observe-orient-decide-act,OODA)”作战回路模型为参考[9-12],着重考虑作战行动的并行性问题而提出的战能积蓄-感知-传递-转化的循环过程,如图1所示。
图1 战能环Fig.1 Combat energy loop
与OODA环的区别在于,战能环并不是必须积蓄、感知、传递、转化全部齐备才是一个环。感知-传递(目标搜索)、感知-传递-转化(攻防对抗)、传递-转化(攻击/防御)都可以构成战能环。
2 作战行为谱构建
武器装备的发展进步尚不能改变人对战争的决定性作用。对于探索作战因果关系的作战仿真实验,迫切需要深入研究与作战装备关联的作战行为,以实现对装备和人作战效能的客观准确评估[13-15]。
2.1 作战行为解析
作战行为是指在一定作战环境下,作战人员为了完成攻击、防御、保障等作战任务而以一定组织形式完成的一系列动作[16-17]。行为有3个要素:作战态势、部署和指挥操纵(如图2所示),分别定义如下。
图2 作战行为的三要素Fig.2 Three components of combat behavior
(1)作战态势:作战态势是行为产生的背景,包括内部态势和外部态势。例如,作战环境以及对手情况等外部态势决定作战单元的行动路线和作战准备。
(2)部署:指作战单元在一定时间内,作战人员按照任务分工形成一定的组织结构和响应关系。
(3)指挥操纵:指在较短时间内,作战人员采取某些动作使得作战单元改变状态、获得能力及产生效果。指挥操纵通常发生在较短时间内,且仅涉及到一部分系统设备。
作战行为是部署与指挥操纵的集合,具有明显的作战态势适应机能,通常是在一定作战部署基础上完成的具有一定映射关系的指挥操纵。不同作战单元因装备、组织结构的差异而具有不同的部署和指挥操纵。作战行为是作战单元与作战态势相互影响作用的结果。部署决定作战行为的基本框架、指向和目的;指挥操纵除了决定作战行为的指向与目的外,还决定作战行为的节奏和强度。部署、指挥操纵和作战态势因子相组合,形成了各种各样的作战行为。
2.2 作战行为采集
作战行为因作战环境、作战样式以及作战装备的不同而表现出各自特点,采集的对象和方法也各有不同,本文以潜艇为对象,研究与潜艇装备相关的作战行为采集方法。
(1)建立作战态势子集S。从潜艇使命任务、作战空间及潜在作战对手出发,分解细化为潜艇作战任务剖面、典型作战环境及典型作战对手,建立作战态势子集(见表1)。
(2)建立作战部署子集B。根据潜艇作战条令,采集进出港部署、航行部署、战斗部署等作战部署,并按照典型作战次序进行编码,建立作战部署子集。
(3)建立指挥操纵子集C。首先,建立指挥员标准口令集。在不同的任务链路中记录指挥员口令,根据口令产生结果的效用和意义筛选出有效口令,并规范为标准口令,纳入指挥员标准口令集进行编码管理,用ΩC={C1,C2,…,Cnc}表示,并在战备远航、训练演习等任务中不断丰富和完善。其次,建立全艇战位的标准操纵子集。根据各战位的职能以及各系统设备的操纵规程,以作战任务剖面、作战链路、作战部署为线索,梳理全艇各战位操纵、口(回)令等行为,并进行编码管理,用ΩO={O1,O2,…,Ono}表示。最后,构建指挥员标准口令集与各战位标准操纵集之间的映射关系(见图3)。
表1 作战态势子集
图3 指挥与操纵之间的映射关系Fig.3 Map of command and control
指挥员口令通常涉及到若干个战位对系统设备的操纵,而达到指挥员口令要求可能存在主观和客观上的多态性,以至于指挥员口令与操纵行为之间存在多种映射关系(例:指挥员口令为主航进一,操纵行为客观上存在熟练度差异,主观上存在直调和逐调的选择,因而构成了一对多的映射关系)。
2.3 作战行为谱构建
针对作战行为的3个要素,提出作战行为谱编码系统:按照作战行为的作战态势、部署和指挥操纵三要素建立S码、B码和C码。对于一种特定行为,按照在某种作战态势下,根据所处的作战部署而产生的指挥操纵动作的顺序建立SBC编码。
设A,S,B,C分别为所研究作战对象的作战行为、部署、指挥操纵和作战态势的集合,ai,si,bi及ci分别是集合A,S,B,C的元素或子集。
作战行为ai定义为ai=(sj,bk,cm)。其中,si⊆S,表示某种作战态势下;bk⊆B,表示指挥操纵处于何种作战部署;cm⊆C,表示具体某种指挥操纵。
对于指挥操纵集合C,是由指挥员标准口令集ΩC、全艇战位标准操纵集ΩO两个子集以及它们之间的映射关系组成。对于集合C中的某一元素cm,可表示为cm=(Ci,Oj,M),其中,Ci⊆ΩC,Oj⊆ΩO,M为指挥口令Ci向具体操纵子集Oj的映射关系。Oj是完成指挥口令Ci所需要的K个具体操纵的集合,每一个操纵包含操纵对象(设备、阀门、按钮、战位等)、操纵形式(辨识、输入、开关、旋转等)、操纵时间及操纵效果4个参数。M是为完成指挥口令Ci,操纵子集Oj中每个操纵的组织关系(并行、串行、交叉等)和运行时序。
3 行为驱动的战能感知方程构建
战能感知方程有别于雷达、声纳等方程主要用于对机理的静态描述,是对交战各方战能的动态感知,与作战对手、环境以及己方的决策控制密切相关。
3.1 感知能力方程
战场态势感知是作战的必要条件,作战实体综合利用各种探测感知手段获取战场信息,探测感知手段包括作战装备自身的探测感知手段和通过通信手段接收己方体系获取的战场信息。
对于作战装备自身的探测感知手段,各探测感知手段有其领域的一套描述感知能力的方程。对于通过电磁波探测目标的雷达装备,是用雷达方程来进行描述[18]。雷达方程是根据雷达的作用过程描述雷达探测距离与各影响因素之间的关系。
Pr=PtA2λ2σ/(4π)3R4
(3)
式中,Pr为接收机接收的信号功率;Pt为发射机的发射功率;A为天线的有效面积;λ为电磁波波长;σ为目标反射截面积;R为目标相对与雷达的径向距离。
对于通过水声探测目标的声纳装备,是用声纳方程来进行描述。声纳方程是与雷达方程类似,但由于水介质的复杂性,不能用传播距离来描述能量的衰减情况,而用传播损失来代替[19]。
(4)
式中,(S/N)为信噪比;(S/R)为信干比;SL为声源级强度;TL为传播损失;TS为目标回声强度;NL为噪声级强度;DI为接收指向性指数;RL为混响级功率;DT为检测阀功率。
通过对雷达方程、声纳方程的原理进行分析,作战实体自身的感知能力可统一用探测方程(式3)进行表达。
PZ=f(D,E,T,Rde,Rdt,Ret)
(5)
式中,D为探测能力子集;E为环境参数子集;T为目标可观测特性子集;Rde为探测能力与环境的相关性;Rdt为探测能力与目标特性的匹配度(相关性);Ret为目标特性与环境的相关性。
此外,对于通过通信手段获取己方体系感知的战场态势信息的能力,用式(6)表示。
PT=f(DS∩DR,Cm,E)
(6)
式中,DS为体系感知能力子集;DR为作战实体的感知需求;Cm={cm1,cm2,cm3,…}为作战实体与体系之间的联通能力,包括通信速率、通信稳定性、通信抗干扰能力等因素;E为环境参数子集。
综上所述,作战实体的感知能力为作战装备自身的感知能力与从己方体系获取的感知能力之和,综合感知能力方程可表达为
ED t=PZ∪PT
(7)
3.2 行为驱动的战能感知方程
对于某一作战实体来说,作战过程是通过不断决策控制己方作战单元的能力、状态以适应对抗所带来的战场态势的变化。指战员的指挥操纵等作战行为将引起探测灵敏度、指向性发生变化从而导致感知能力发生变化,同时目标状态、敌我相对空间关系以及对抗结果的变化亦将导致感知能力发生变化。指挥操纵等作战行为通过作用于系统设备,是控制、调节战能感知的主要驱动力量。
根据作战能量的观点,行为驱动的战能感知方程可表示为
(8)
式中,nD t表示影响战能感知能力的作战行为的个数;ξD t表示行为驱动下的战能感知能力集合;ED t表示感知能力集合。
感知能力ED t在行为驱动函数fi的作用下变为战能感知能力fi(ED t),行为驱动函数是由于指挥操纵等作战行为通过改变作战平台各系统设备的状态、对抗双方相对空间关系以及产生对抗结果等因素来实现对战能感知的驱动,因此
fi(ED(t))=ED(t)⊗ai([t,t+Δt])
(9)
式中,ai={sj,bk,cm}表示某一个具体作战行为;Δt表示从指挥口令Ci下达后,其对应的操纵子集Oj全部完成的时间。
每个用于感知能力调整的作战行为都会影响其他能力,如潜艇为追求探测能力而采用低航速工况,将影响遭遇鱼雷攻击时的防御能力。通过采集作战实体在该行为实施后的系统设备参数,结合作战人员的部署情况进行综合处理,计算出该作战行为驱动后作战实体的能谱。
fi(Ej(t))=Ej(t)⊗ai([t,t+Δt]),j=1,…,nj
(10)
式中,Ej(t)为作战装备固有的能力,是一个受作战行为影响具有一定动态范围的量,如潜艇的机动能力、声隐蔽能力等。将具体的能谱聚合处理后得到当前势谱Fi(ξk)(作战潜能)。对潜艇来说,势谱主要包括隐蔽势能、探测势能、攻击势能、防御势能、保障势能等。
4 基于战能感知方程的优化控制
战能感知方程是通过探测感知手段和途径获取敌、我以及环境信息,并经过处理分析得到当前战场态势。战能感知的目的是为了在作战实验仿真推演中给下一步作战行动(口令+操纵)提供指向性。具体的作用过程如图4所示。
图4 战能感知优化框架Fig.4 Optimize frame of combat energy perception
(1)战能感知需求分析。通常战能感知阶段需要不断进行优化调整以达到最优的探测感知效果,首先立足已获取的当前态势,经过基于指挥员经验、支撑数据库等先验信息进行目标预测,判断目标(快变)和环境(慢变)的变化趋势以及意图,并结合当前作战任务,分析完成作战任务或应对态势变化所需要的战能环状态及目标函数参数θk。
(2)获取当前势谱。根据作战实体当前各系统状态参数以及作战人员的部署状态,计算当前能谱,并聚合出当前势谱F0(ξk)。
(3)感知任务满足度评估。根据当前战能环当前状态,确定优化目标函数
(11)
(4)在构建作战行为方案空间的基础上构建势谱空间。根据作战实体当前所处的状态,选择可以用于调整战能感知能力的作战行为单元ai,形成当前可用的作战行为子集Anow,并将中的作战行为单元进行排列组合,剔除违反操纵规程和作战条令的行为方案,形成作战行为方案空间RA。根据每个行为方案ra,按照第3.2节中的方法计算其势谱,构建势谱空间ΩF。
(5)战能优化控制,构建期望势谱。对势谱空间进行搜索,将满足目标优化系数γ(如优化系数为0.8,则保留最优20%)的势谱保存起来,形成优势种群。对优势种群中的势谱,按照式(11)的目标函数计算其满意系数,同时根据式(12)的代价函数计算其代价。
(12)
式中,F(ξk(t))为优势种群中各行为方案的平均势谱;i为该阶段所需要优化的势谱分量序号。选取满意度μ大于所设定的满意系数η且其代价L最小的势谱作为期望势谱Fnew(ξ(t))。
(6)获取作战行为方案。将期望势谱经反变换得到新的能谱曲线
Enew(t)=F-1(Fnew(ξ(t)))
(13)
每个能谱曲线的变化都可以找到其对应的作战行为方案(指挥口令+战位操纵),实现战能感知控制的优化。
5 实例分析
5.1 想定设置
红方作战平台A、作战平台B接收作战任务,协同对已知概略位置的蓝方作战平台C进行搜索攻击。在搜索(战能感知)阶段,作战平台A、B的探测方式为{Rd1,Rd2},搜索方式为{Rs1,Rs2,Rs3},机动方式为{Rm1,Rm2},深度选择为{Rh1,Rh2,Rh3,Rh4,Rh5};蓝方作战平台C机动方式为Bs1,规避策略为Bg1,探测方式为Bd1。蓝方作战平台C在探测方式Bd1下的感知能力EBd1要大于红方作战平台A、B的感知能力ERd1。
5.2 战能感知优化控制
首先,设置优化参数,感知任务满足系数为0.8,优化目标系数为0.9,迭代次数为势谱空间数量。
其次,根据两艇协同搜潜的探测感知任务,确定战能环为感知阶段及目标函数参数[θ1,θ2,θ3,θ4,θ5],并提取两艇的作战行为子集。
A艇(协同艇)作战行为子集为:Aa={aa1,aa2,…,aan1},其中,n1=12。包括:①航深调节;②航速调节;③机动方式选择;④感知模式选择;……。B艇(指挥艇)指挥行为集合为:Ab={ab1,ab2,…,abn2},其中,n2=11。包括:①航深调节;②航速调节;③航向调节;④感知模式选择;……。
将子集Aa、Ab中的作战行为分别进行排序、拼装、筛选,形成作战行为方案空间RA1、RA2。
RA1=[aa1→aa2→aa5→aa10;aa1→aa4→aa5;
aa1→aa9→aa3→aa7→aa8;…,
aa12→aa8→aa6→aa11]
(14)
对每一个作战行为方案ra,利用行为驱动的战能感知方程式(9)计算在该方案后作战实体所呈现的能谱,并对该能谱作聚合处理得到势谱,构建势谱空间ΩFa、ΩFb。通过目标函数式(11)和代价函数式(12)对势谱空间进行优化搜索,选取满足优化目标同时代价函数最小的势谱Fanew(ξ(t))、Fbnew(ξ(t))作为期望势谱。将期望势谱所对应的作战行为方案作为最优决策控制方案。
根据设定参数采用本文的方法(Method1)和传统基于分布估计算法(Method2)进行1 000次蒙特卡罗优化控制仿真,求均值[20-21]。结果如表2所示。

表2 战能感知优化结果
由实验结果可知,基于行为驱动的战能感知方程用于优化控制可有效提升对目标的感知效果,同时增强了行为方案探索的时效性。两艇协同采用如图5方式搜潜可得到最优感知效果。红方作战平台A采用Rd1探测方式、Rs3搜索方式、Rm3机动方式以及Rh4深度;红方作战平台B采用Rd1探测方式、Rs2搜索方式、Rm1机动方式以及Rh3深度。
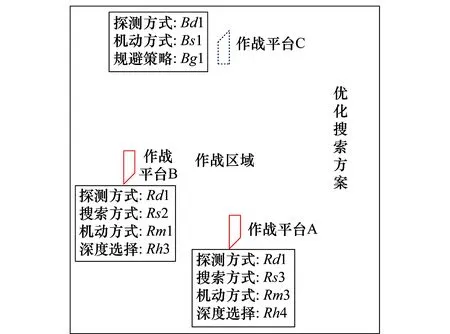
图5 两艇优化搜潜方式Fig.5 Optimize detection method of two submarines
6 结 论
战能感知是战能环发起和调整的条件,受作战行为驱动。通过研究作战行为与战能感知的关系,构建战能感知方程,可实现对战场态势感知的动态和定量描述,为考察评估作战指挥等人因影响作战实验提供有效途径。
本文提出的基于战能感知方程的优化控制流程和方法相比传统的分布估计算法从感知效果和搜索效率上皆有不同程度的提升。有利于快速有效地获取满意的行动方式,为战法训法创新提供可量化评估的有效途径。