自动过分相控制系统设计与实现
2018-10-15刘晓梅魏立峰陈俊生
刘晓梅, 王 朔, 魏立峰, 陈俊生
(1.沈阳化工大学 信息工程学院, 辽宁 沈阳 110142; 2.沈阳铁路信号厂, 辽宁 沈阳 110025)
自动过分相控制系统是针对微机控制电力机车而研制的自动过分相控制产品[1].其主要功能是当电力机车通过分相区时,系统根据当时机车速度、位置自动平滑降牵引电流、断辅助机组和分断主断路器;通过分相区后,自动闭合主断路器、闭合辅助机组和控制牵引电流平滑上升,从而实现电力机车通过分相区时的自动化操作,大大减轻司机的工作强度.
目前,世界上研究并使用的自动过分相控制系统大体有二种方式:第一种是地面开关自动切换方式[2],该方案存在过分相后合闸时电流冲击较大、运行维护费用较高等缺点;第二种是柱上开关自动断电方式[3],该方案的优点是比地面切换方式简单,供电死区比现有的分相区短,无须司机操作,机车上的主断路器不需分断,但该方案存在真空负荷开关带负荷分断,过分相后机车电流有很大的冲击等缺点,这种方式不适应我国的电压制式.
本文研发的自动过分相控制系统不仅实现了电力机车的自动过分相,而且相比其他的自动过分相控制系统成本低,只需将过分相主机安装在控制台,将车感器安装在机车上,将地感器安装在分相区的轨枕处即可.该系统可以对铁路机车分相系统中主要部件和系统进行性能分析和设计,通过采集实验过程数据,验证系统稳定性与可靠性,为铁路机车的自动过分相的经济化、量产化提供了有力的技术支持.
1 系统原理与结构
系统总体结构如图1所示.系统是以在分相区前后分别埋设地感器作为对分相区的定位,以安装在机车下面的车感器接收地面定位信息来判断机车所在的位置[4].当自动过分相车载系统主机识别到预告信息时,系统主机向机车微机柜发送预告信号,机车随即卸载、分主断;当系统主机识别到强迫信息时,系统主机向机车微机柜发送强迫信号,机车立即分断主断;当机车惰行通过分相区后识别到恢复信息时,系统主机向机车微机柜发送恢复信号,机车立即合主断.自动过分相控制系统主机为机车控制系统提供了一个装置状态信号.当该信号为110 V高电压时,表示装置工作正常;当该信号为0 V时,表示装置故障,此时系统主机自动退出,可进行手动过分相.对于管理屏无法显示自动过分相过程的机车,系统主机可提供一个蜂鸣器提示信息和一个自动过分相控制系统正常与否的指示信息.为提高系统的安全性和可靠性,地感器和车感器均采用冗余备份方式.
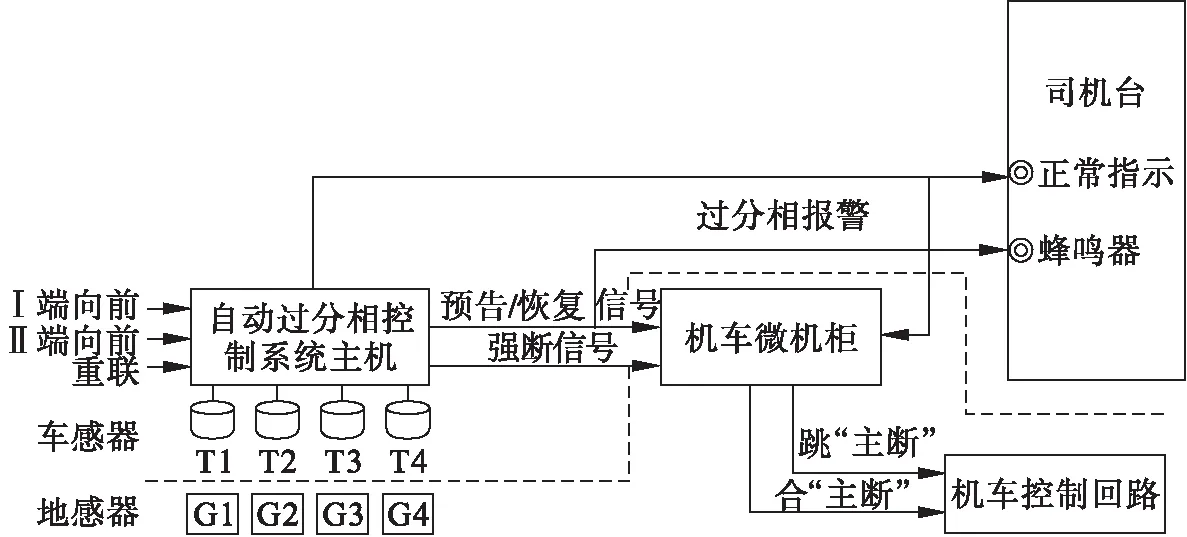
图1 系统总体设计框图
2 系统特点
与同类的自动过分相系统相比,该系统有以下特点:
(1) 车感器信号为双路输入,可避免因单路输入故障而使信号识别失效;
(2) 由于电气化的线路轨道回流引起的电磁干扰大,对车载感应器的信号回路加强了抗干扰设计,因此,使用2.4 V的门限来限制牵引回流感应电压以及其他干扰;
(3) 系统具有自检和故障诊断功能,极大地提高了装置运行的可靠性;
(4) 系统硬件集成度高,将滤波器、保护电路等都集成到一个电路板上;
(5) 硬件安装容易,造价低,改造方便,利于推广.
3 系统硬件设计
如图2所示,电力机车自动过分相功能由自动过分相信号输入部分和自动过分相控制输出部分共同实现,主机采用西门子S7-200 PLC[5].定位信息通过地感器与车感器的协调工作,通过整流器与比较器将信号传给可编程控制器,可编程控制器通过既定好的程序识别定位信息,发出预告,发恢复以及强迫信号给分相器与记录板.而且工作状态也通过滤波器将信号显示在控制面板上.

图2 硬件连接电路
机车通过地面感应定位信号确定机车与分相点的相对位置,地面定位和机车感应信号分别采用斜对称埋设和备份方式接收,以保证自动过分相的安全和可靠[6].预先根据要求在每个分相区前后分别埋设两个地感器.分相区前方放置2个地感器,一个在轨道右边为G1,一个在轨道左边为G2;分相区后面也放置2个地感器,一个在轨道右边为G3,一个在轨道左边为G4,具体如图3所示.

图3 地感器位置示意
4 系统软件设计
系统软件由PLC控制软件和记录器分析处理软件组成,软件均采用结构化和模块化设计.
系统软件程序主要是采用PLC专用的梯形图进行编写,采用模块化结构设计.程序通过地感器的定位来判断接收到何种信号,根据此信号来自动分主断与合主断.系统开机后即运行主程序,其主要功能包括:完成开机后系统的初始化操作,调用报警程序,以及调用系统的各功能模块.系统流程如图4所示.
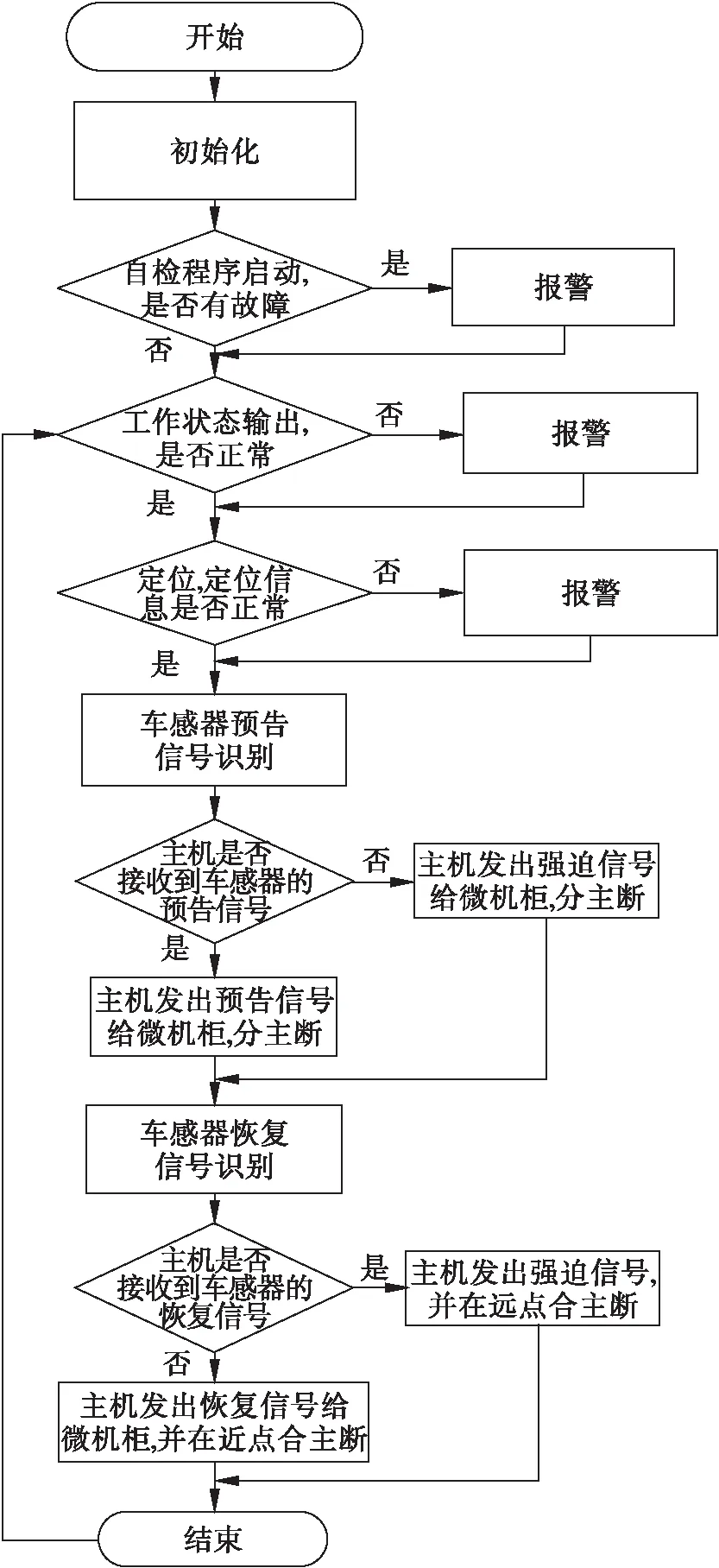
图4 系统流程
初始化程序包括调用自检程序、功能程序预处理、输入点清零、标志位清零、数据寄存器清零等.初始化之后程序自检,检查光耦、感应器是否异常,异常会报警.继续工作状态输出,检查感应器的短路与断线情况,如果有问题,那么启动延时器,输出报警信号,反之程序继续工作.定位程序为先辨别是向前输入还是向后输入,之后通过4个地感器对车感器的每个双路输入信号来判断位置信息.
流程图中“车感器恢复信号识别”为高电压,则取G4地感器信号,机车 “反方向”运行时,G4为预告,G3为强迫,G2为近点恢复,G1为远点恢复.
5 实验模拟数据
在单轨回流1 000 A、车感器标准位置时,车感器记录的牵引回流感应电压的图形见图5.

图5 钢轨回流感应电压
车感器下表面距地感器上表面150 mm、机车速度10 km/h时,车感器对地感器的感应电压见图6.其中,线条a为感应电压变化曲线,线条b表示磁链变化曲线.

图6 机车速度10 km/h车感器感应电压
车感器下表面距地感器上表面150 mm、机车速度250 km/h时,车感器对地感器的感应电压见图7.其中,线条a表示感应电压的变化情况曲线,线条b表示磁链的变化情况曲线.
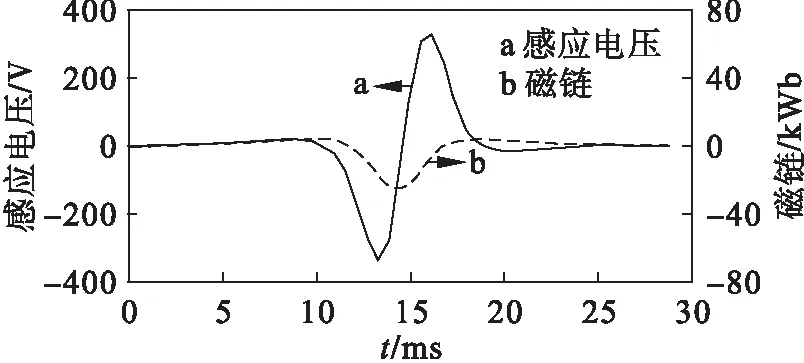
图7 机车速度250 km/h车感器感应电压
由图5可知牵引回流干扰电压峰值约400 mV,而由图6、图7可知机车速度在10 km/h和250 km/h时,车感器对地感器感应电压峰值分别为13 V和350 V.主机采用2.4 V的接收门限,限制牵引回流感应电压,既排除了干扰又使有用信号可靠接收.
6 应用情况
在株洲电力机车有限公司HXD10178号电力机车上安装自动过分相控制系统,在大秦线承运2万吨货物,在经历32个分相区过程中,自动过分相控制系统控制准确、稳定、可靠,无任何误动、错动现象,司机反映很好.实践证明:该装置分相效果好,并且安全可靠,安装维护也比较方便,完全可以满足目前电力机车的自动过分相要求.
