无人飞行器机载光电平台的双速率环串级控制
2018-10-13王日俊
王 雯, 王日俊
(1.太原工业学院,太原 030008; 2.中北大学机械工程学院,太原 030051)
0 引言
近年来,无人飞行器在军事及民用领域内应用广泛,搭载于无人飞行器上的机载光电平台系统是其得以应用的关键所在[1-3]。但是,无人飞行器的姿态运动、气流扰动以及振动会对机载光电平台产生影响,引起机载光电平台的振动,机载设备获取信息的品质会大大降低[4-6],所以,控制方案上首先必须考虑扰动对系统的影响,对振动的扰动信号进行有效的抑制。无人飞行器机载光电平台的控制性能直接影响无人机系统的整体性能,因此,如何通过合理的设计方案使平台满足系统稳定控制性能指标的要求,已成为当前工程应用中最关心的问题之一,机载平台的稳定控制至关重要。
陀螺惯性平台系统是机载光电平台常用的一种控制结构,通常,陀螺惯性平台系统采用单速率环与位置环相结合或与电流环相结合的复合稳定控制方案[7-10]。然而,这种控制结构有很大的局限性,对机载光电平台的内外部扰动抑制效果不佳[11],很难克服机载光电平台非线性特性对系统的影响。随着对无人飞行器机载光电平台系统的稳定性能要求不断提高,系统稳定控制的性能指标已难以满足。因此,基于串级控制思想的双速率环控制结构在稳定平台的应用中得到进一步的研究。文献[12]将基于双速率环的控制结构应用于舰载光电经纬仪的视轴稳定控制,实验表明在高海况下,其在提高抑制内部扰动能力的同时,能够有效隔离载体扰动;文献[13]中,为了获取高分辨率的遥感数据,利用双速率环控制结构提高系统的抑制扰动性能,并将其应用于三轴惯性平台的稳定控制,平台的稳态精度得以提高。
鉴于双速率环控制结构的优点,本文对双速率环控制结构在无人飞行器机载光电平台中的应用进行研究。采用MEMS陀螺仪进行数字测速并构成控制系统的内环,外环使用编码器微分结构,在隔离无人飞行器载体扰动的基础上,抑制影响机载光电平台稳定性能的力矩扰动,并通过理论分析、仿真和实验,结合机载光电平台的实际应用对该方法的有效性进行分析和验证。
1 机载光电平台简介
通常,无人飞行器的机载光电平台采用3自由度的稳定结构,搭载于无人飞行器底部,通过偏航、俯仰和滚转3个自由度的转动来实现对地面目标的监测与跟踪等。机载光电平台的结构如图1所示,它由内框架、中框架和外框架构成,分别完成俯仰方向、滚转方向和偏航方向3个自由度的运动。各框架坐标系定义如下:O-XaYaZa为机体坐标系;O-XpYpZp为俯仰坐标系;O-XqYqZq为偏航坐标系;O-XrYrZr为滚转坐标系。
外框架(偏航)通过轴OZa安装于无人飞行器上,内框架(俯仰)通过轴OYp安装于外框架上,中框架(滚转)通过OXq安装于内框架上。机载设备安装于俯仰框上,视轴沿OXp方向。执行器(无刷直流电机)分别安装在轴OZa,OXq和OYp上。3个陀螺仪、3个加速度计和3个光电编码器,均采用直接法分别安装于平台的3个框架。
为了提高无人飞行器机载光电平台的稳定控制精度,设计一种基于双速率环的串级控制方法,该控制结构抑制干扰信号的能力更强,可以提高系统的鲁棒性能,被控对象特性、参数变化的影响得到了有效抑制。
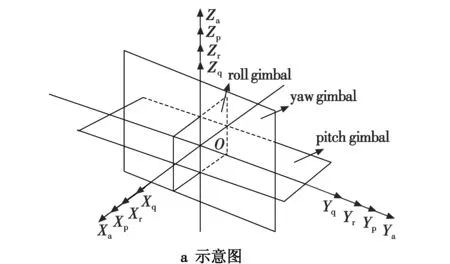
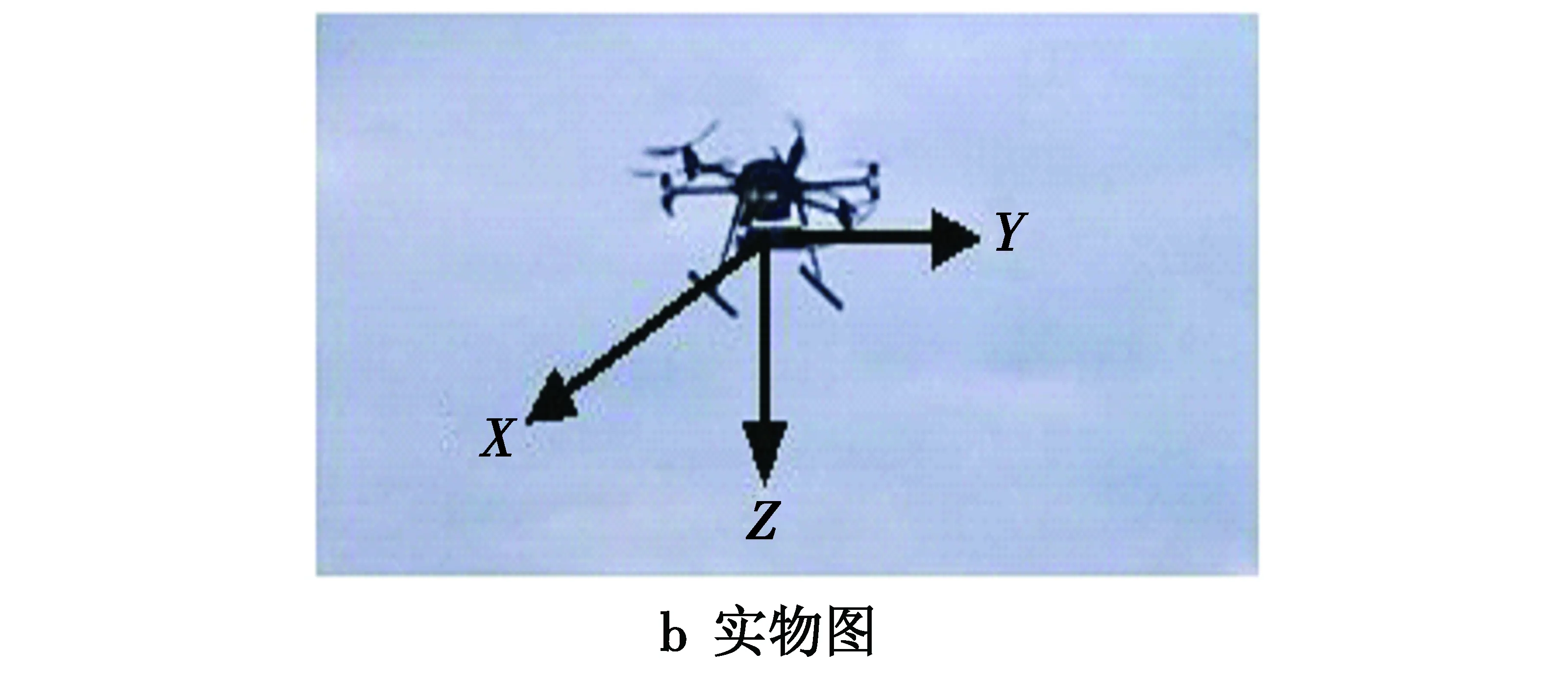
图1 机载光电平台示意图
2 双速率环控制结构分析
2.1 基于单速率环的控制结构
基于单速率环的机载光电平台的伺服控制结构及其数学模型如图2所示,它通过速率陀螺获取速度信息来构成测速反馈环节。当实际状态与期望状态出现偏差时,稳定控制器将根据这种偏差发出新的控制信号,驱动执行机构,以纠正偏差,抵消干扰的作用,在单速率环闭环控制中,稳定控制器能根据速度反馈信息对扰动产生的偏差信号进行抑制,从而实现机载光电平台的稳定控制。
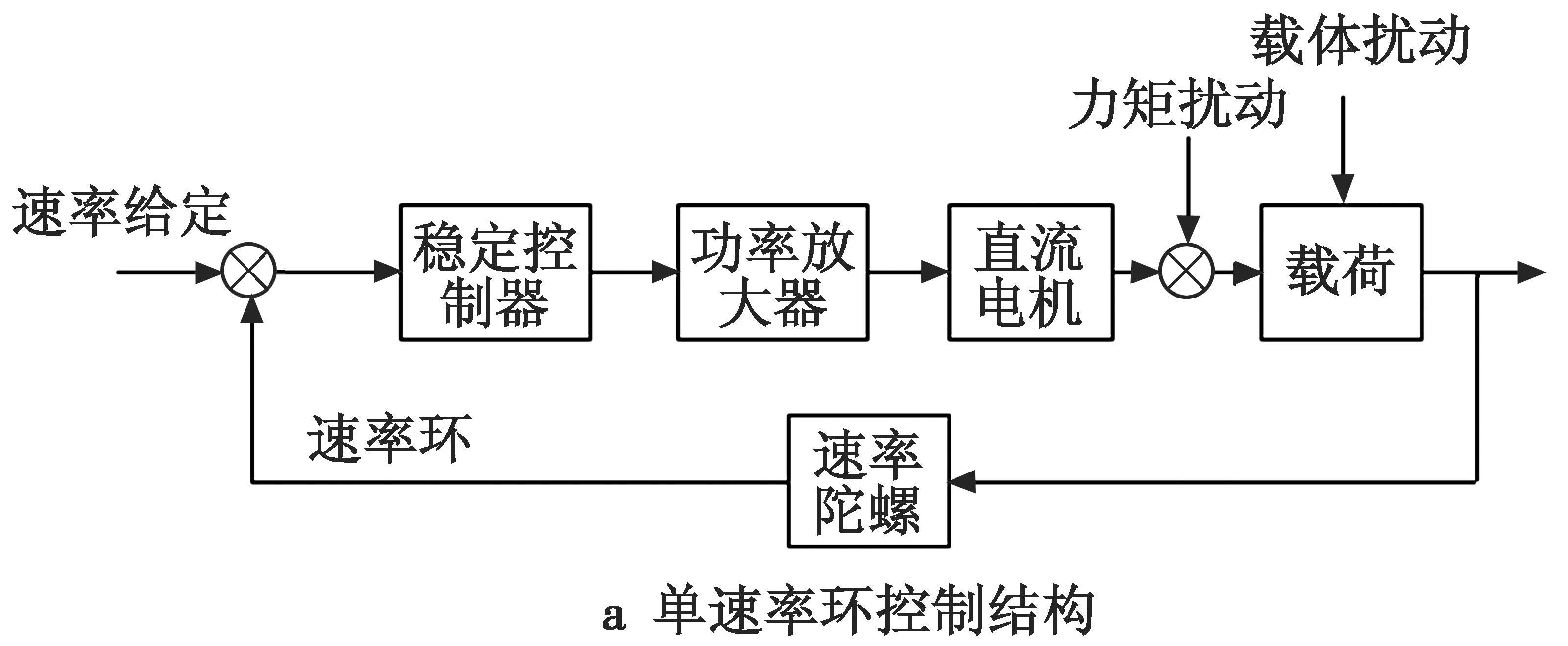
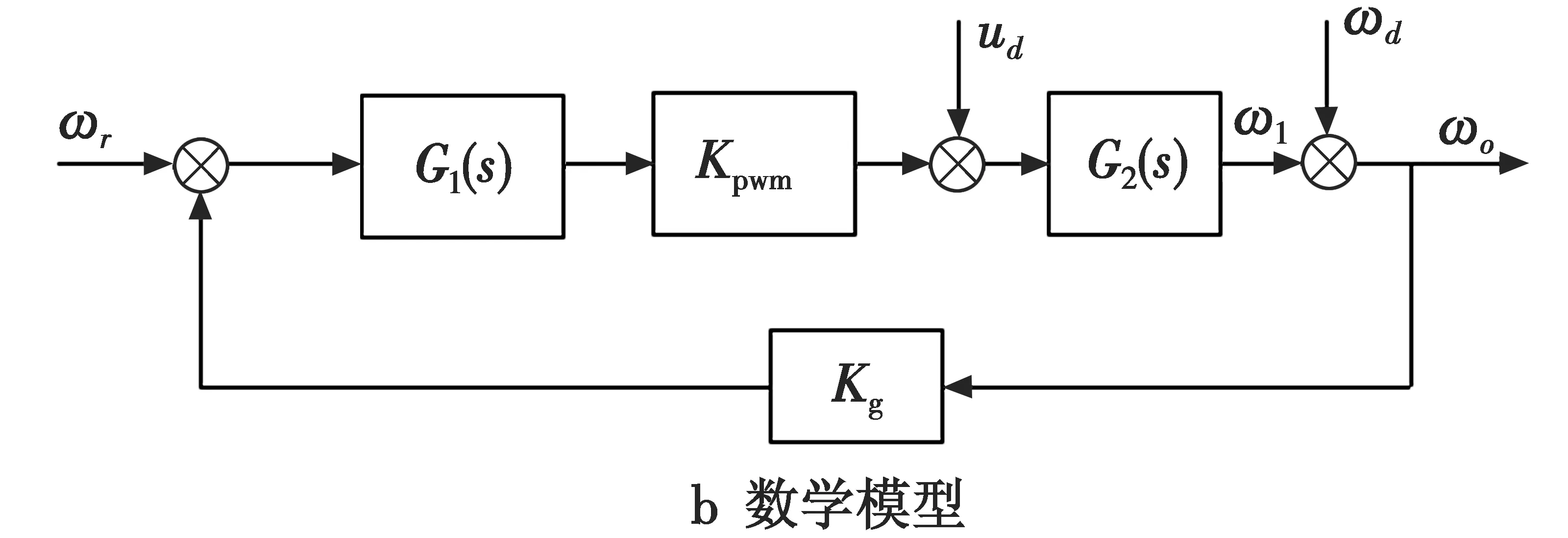
图2 单速率环控制结构Fig.2 Structure diagram of single speed-loop control
图中:G1(s)表示稳定控制器;G2(s)表示电机及载荷的传递函数;ωr表示速度的给定值;ωd表示干扰速度,它由载体的力矩扰动产生;ω1表示电机的实际速度;ωo表示载荷的速度;ud表示系统内部干扰信号。
在上述控制结构中,假设把ud,ωd和ωr均视为系统的输入,由图2可得,在单速率环控制结构中系统输出相对于系统输入ud,ωd以及ωr的Laplace变换为
(1)
在设计G1(s)时应满足
KpwmKgG1(s)G2(s)>>1
(2)
则式(1)可以简化为
(3)
由式(3)可知:首先,内部干扰信号和载体力矩扰动对载荷输出的影响由稳定控制器G1(s)完成,并且多种扰动也互相影响,仅靠G1(s)无法协调控制;其次,抑制干扰速度ωd与传递函数G2(s)也有关系,所以仅采用单速率环控制校正很难获得满意的效果。
2.2 基于双速率环的控制结构
根据上述分析,考虑到串级控制的特点,采用基于双速率环的控制结构,内环通过速率陀螺实现,外环由编码器微分后获取的电机转速信号构成。基于双速率环的机载光电平台的控制结构及其模型如图3所示。图中:G1(s)表示速度调节器,速率陀螺内环可以有效地克服内部力矩干扰信号,非线性对系统的影响也能得到抑制;编码器微分外环用于消除外部载体扰动信号,使得机载光电平台的稳定性能得以提高。
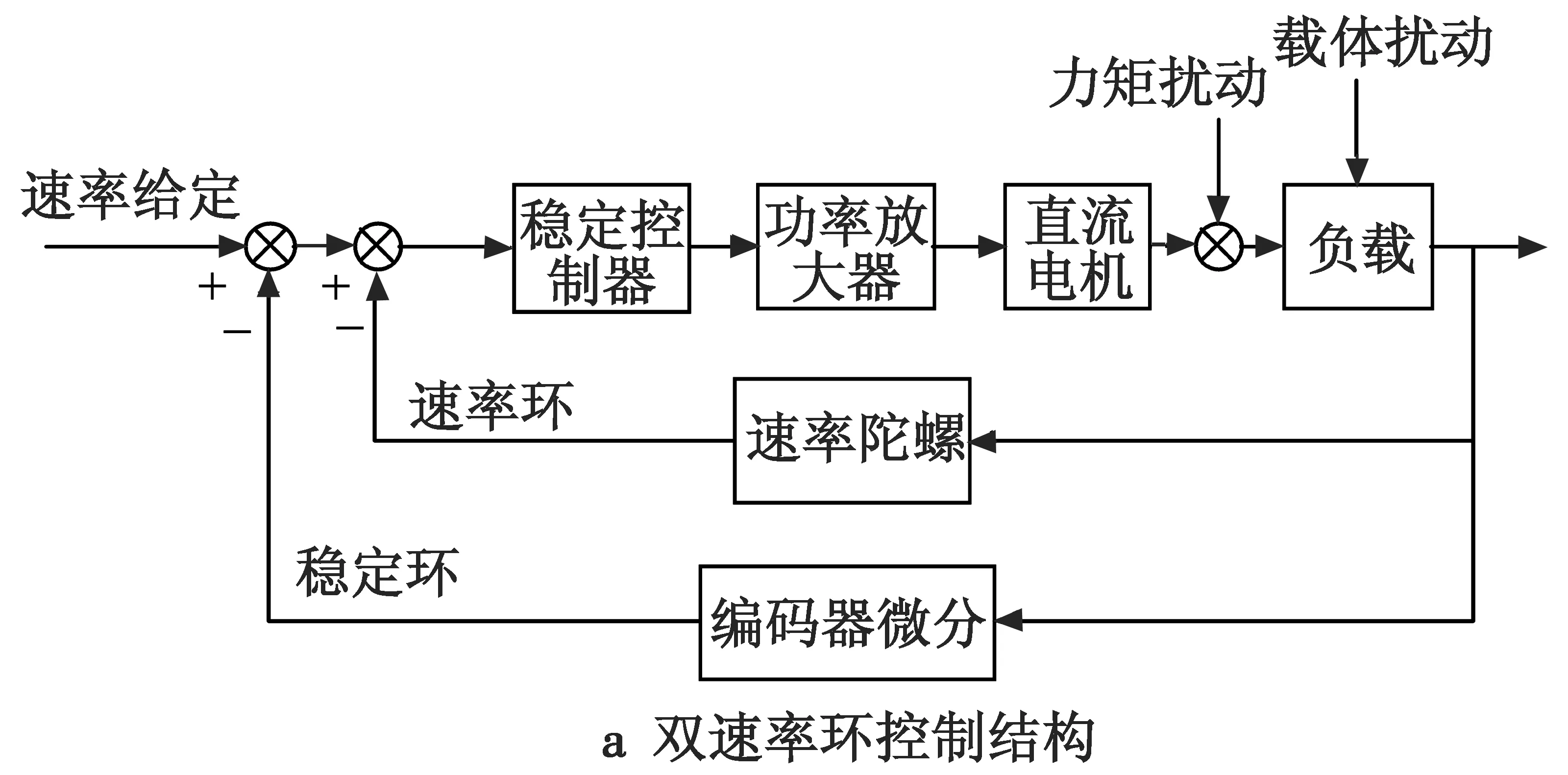
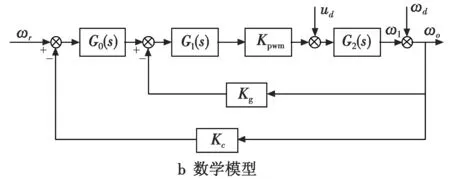
图3 双速率环控制结构Fig.3 Structure diagram of double speed-loop control
2.3 双速率环控制特点分析
2.3.1 控制系统的抗干扰性
在如图3所示的控制结构中,假设ud,ωd和ωr均为系统的输入,依据图3可以得到双速率环控制结构输出对于系统的输入和干扰的传递函数为
(4)
在设计G1(s)和G0(s)时应满足
KgKpwmG1(s)G2(s)>>1
(5)
KpwmG1(s)G2(s)[Kg+KcG0(s)]>>1
(6)
则式(4)可以简化为
(7)
由式(7)可知,在基于双速率环的控制结构中,G1(s)有对外界力矩干扰ud的抑制作用,稳定控制器G0(s)起辅助调节的作用,并且调节器G1(s)不受系统参数变化的影响。
通常,信噪比可用于衡量系统的抗干扰性能,控制系统的信噪比D可表示为
(8)
式中:y为输出;r为控制系统的某一个给定值;d为扰动。如果y/r趋近于一个常数,则y/d接近于0,增大系统对扰动信号的抑制[14-15]。
采用单环控制时,对于ud与ωd的信噪比分别为
(9)
(10)
在双速率环控制结构中,对于ud和ωd的信噪比分别为
(11)
(12)
在双速率环控制系统结构中,调节器G1(s)的增益值往往较高。对比式(9)和式(11),当系统使用PID控制时,|D2u|>|D1u|,使系统的抗干扰性能得到很大改善,控制系统抑制干扰力矩ud的能力增强;而对于外部载体干扰ωd,双速率环控制结构中的内环能有效改善机载光电平台的动态特性,相位裕量增大,相比之下,双速率环控制结构抑制干扰信号的能力更强。
2.3.2 控制系统的鲁棒性
速率内环引入前,
P1(s)=KpwmG1(s)Qm(s)
(13)
(14)
速率内环引入后,
(15)
(16)
由霍洛维茨定义的灵敏度函数为[16]
(17)
得到单速率环和双速率环控制结构的灵敏度分别为
(18)
(19)
由式(18)和式(19)可以看出,采用双速率环控制系统时,速率内环的引入提高了系统的鲁棒性能,被控对象特性、参数变化的影响也得到了有效抑制。
2.3.3 动态响应分析
假设直流电机的反电动势系数、电磁时间常数、输出扭矩分别为Te,Ke与Tm,则得到控制对象传递函数为
(20)
(21)
令k1=Kpwm/Ke,并考虑Kpwm与G2(s),则式(21)可表示为
(22)
由式(22)可知,在双速率环控制结构中,被控对象的等效时间常数t减小为原先的1/(1+k1kcG1(s))。因此在把光电编码器微分测速反馈作为速度内环引入后,整个被控对象的阶次降低,时间常数t减小,系统的响应时间缩短,控制系统的动态响应性能得以提高。
3 仿真与实验
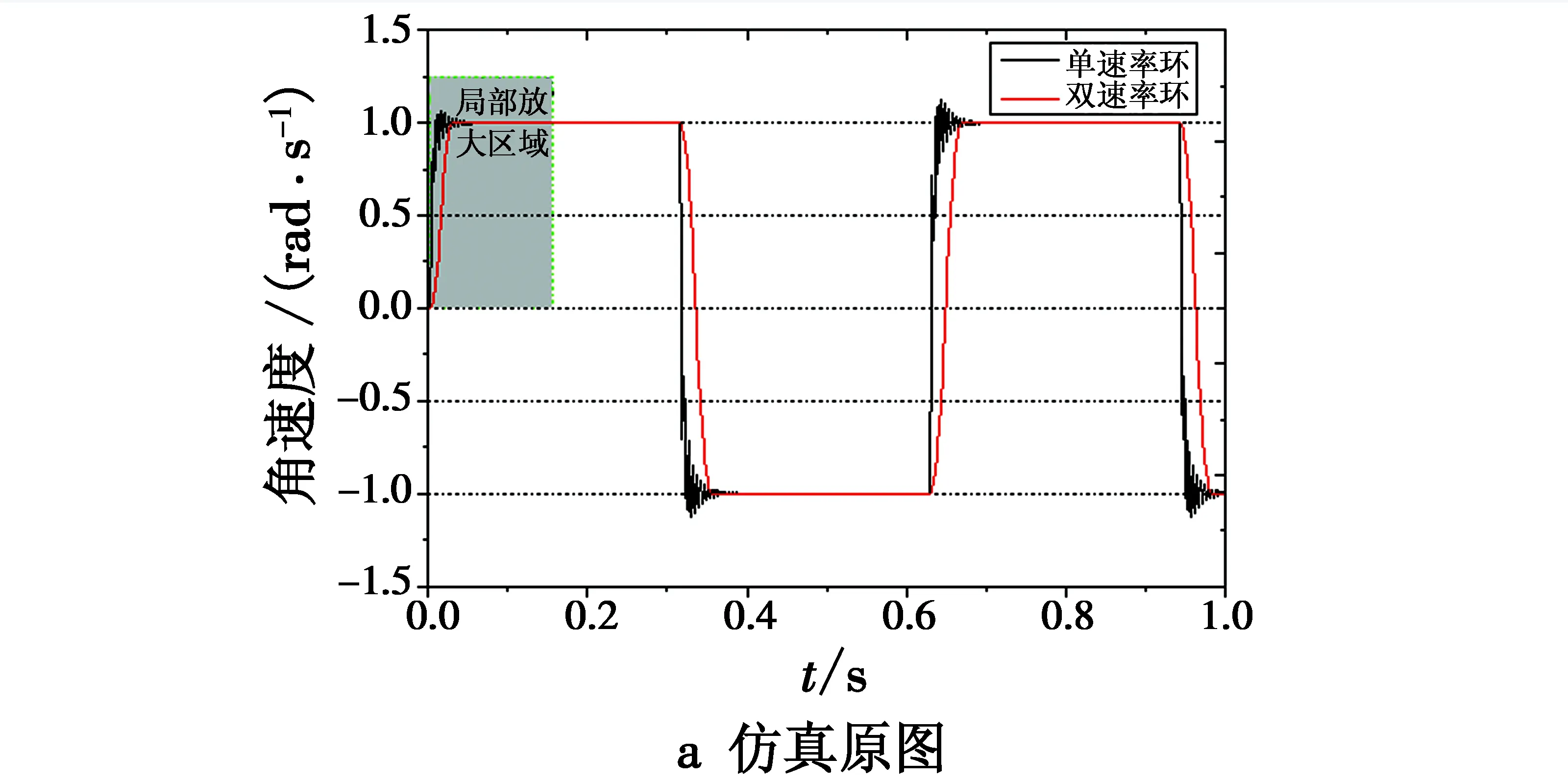
通过在Matlab/Simulink中构建系统的仿真模型来对比分析单速率环与双速率环的控制效果。根据图2和图3设计伺服控制系统,取某机载光电平台的传递函数G2(s)=1600/s(s+50),采样周期为0.001 s,双速率环均采用PID控制算法,其中,kp=10,ki=0.01,kd=0.05。当速度给定ωr=0°时,即平台保持在惯性空间内稳定,引入周期为1 s、幅值为1 N·m的方波力矩干扰,对比仿真实验的结果如图4所示。
由图4a可以看出,单速率环与双速率环控制结构均能跟踪方波力矩扰动信号。当采用单速率环时,在给定切换点处存在一定的跟踪误差。将给定切换点处放大后,如图4b所示,在速度给定切换点处存在较大的振荡现象。当采用双速率环时,在给定切换点处存在的误差明显减小,且基本不存在振荡现象。
假设机载光电平台搭载于无人飞行器上,当速度给定ωr=sint时,分别进行在采用单、双速率环时控制系统对速度信号的跟踪性能对比实验,实验结果如图5所示。其中:图5a为采用单速率环时,系统对给定速度的跟踪曲线,其跟踪的误差值小于0.1 rad/s,难以实现精确的跟踪;图5b为采用双速率环时,系统对给定速度的跟踪曲线,此时,跟踪的误差值小于0.075 rad/s,且跟踪误差有界。显然,后者跟踪结果更为精确。
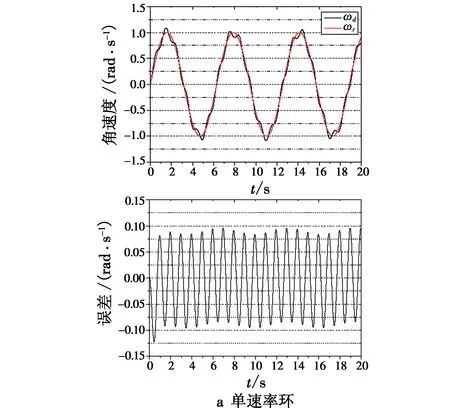
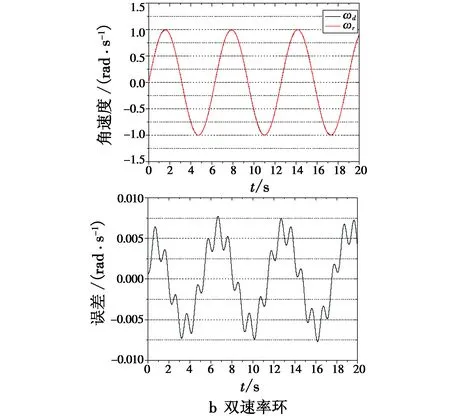
图5 速度跟踪性能对比仿真实验Fig.5 Simulation experiment of speed tracking performance contrast
通过系统的阶跃响应对比实验来分析采用单、双速率环时控制系统的动态响应性能。当速度给定ωr=10 rad/s时,系统的对比结果如图6所示。从图中可以看出,采用单速率环时,系统的超调量约为10.5%,过渡过程耗时约50 ms;采用双速率环时,系统的超调量约为5.3%,过渡过程耗时约25 ms。可见,双速率环的设计提高了系统的稳定性,超调降低,同时系统的响应时间缩短,响应速度较快。
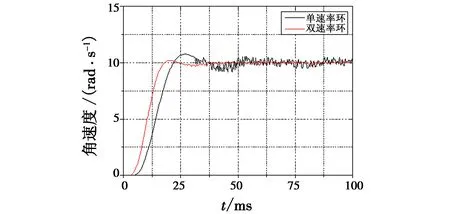
图6 动态性能对比仿真实验
在飞行过程中,通过视轴的稳定性实验来对比分析采用单、双速率环时系统的扰动抑制性能。当位置给定θr=0°时,即机载光电平台相对飞行器保持静止,实验结果如图7所示。其中:图7a为采用单速率环时的稳定误差曲线,其稳定误差在±0.08°之间,稳定的精度约为1.04 mrad;图7b为采用双速率环时的稳定误差曲线,稳定误差可以控制在±0.02°之内。由此可见,后者稳定的精度和运动平稳性均优于前者,表明双速率环控制结构具有更好的扰动抑制性能。

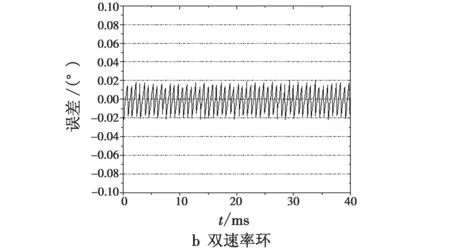
图7 视轴稳定误差曲线Fig.7 Curve of LOS stabilization error
4 结论
本文对无人飞行器机载光电平台的双速率环稳定控制结构进行了研究,在对其抑制扰动能力、动态响应性能以及鲁棒性进行理论分析的基础上,进行了仿真与实验对比,对速度信号的跟踪误差值小于0.075 rad/s,系统动态性能的超调量约为5.3%,过渡过程耗时约25 ms,当位置给定θr=0°时,即机载光电平台相对飞行器保持静止,视轴稳定误差在±0.02°之间,稳定的精度约为0.26 mrad。数据表明,双速率环控制结构可以有效地抑制力矩扰动,提升机载光电平台隔离载体扰动的能力,能够满足无人飞行器机载光电平台的稳定控制要求。
