并联混合动力传动系统结构创新设计研究∗
2018-10-13邓涛,周豪,唐鹏
邓 涛,周 豪,唐 鹏
(1.重庆交通大学机电与车辆工程学院,重庆 400074; 2.城市轨道交通车辆系统集成与控制重庆市重点实验室,重庆 400074)
前言
随着混合动力汽车迅速发展,构型成了各大汽车企业研究重点[1]。目前大多构型是由传统自动变速器衍生发展而来,如利用杆逆向拆分方法对功率分流系统进行构型分析,从现有复合分配结构获得适用于混联式所有结构[2-3];基于传统4速变速器设计单电机混合动力系统构型[4];针对单行星排混合动力系统利用机械创新设计方法获得22种新的混联混合动力传动系统[5]。也有一些学者提出了一些创新构型,如Tsai等人提出的单电机并联式混合动力系统新构型[6-7];谢天礼等人提出的多自由度行星齿轮拓扑结构[8-9]。然而上述构型设计并未进行全面分析,构型的递推方法缺乏理论支撑,且传动评价系统缺乏整体评价。
本文中以单电机并联式混合动力汽车传动系统为研究对象,引入机械创新设计方法[10]进行构型设计,从机械运动链方法出发,着重于构型的设计过程,获取多种并联混合动力传动系统创新构型。
1 并联式混合动力传动系统分析
1.1 单电机并联混合动力系统
单电机并联混合动力传动系统构型如图1所示,采用双行星排2自由度行星齿轮耦合结构,控制CL1和CL2与B1和B2,进行发动机单独驱动、电机单独驱动、混合驱动、制动能量回收和怠速充电等模式之间的切换。其中,图1(a)为朱福堂[4]提出的构型,其功率流传输更为灵活,且发动机功率可直接传递到传动轴上,避免了能量转换损耗,但整体结构较为复杂。图1(b)为Tsai[6-7]提出的构型,其结构相对简单,将电机与输出行星排太阳轮同轴连接,发动机单独驱动模式的传动比变化接近于恒定值。
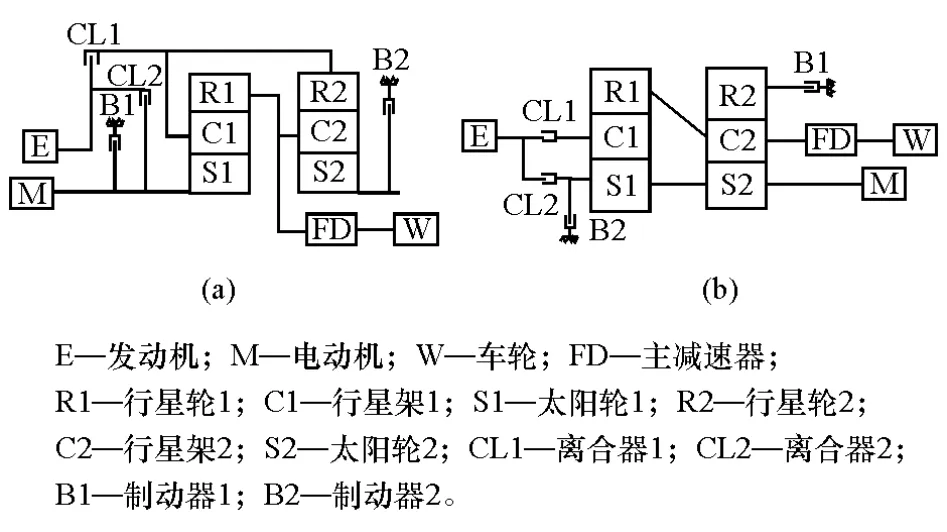
图1 单电机并联混合传动系统行星机构简图
1.2 机械拓扑结构分析
在2自由度行星轮机构中,连杆数量、转动副数量与齿轮副数量之间的关系式为

式中:NJ为运动副数量;NJR为转动副数量;NJG为齿轮副数量;NL为连杆数。7杆机构并联混合动力系统的运动副、齿轮副和转动副数量分别为10,4和6。
根据图1,可将行星齿轮系统概括为拓扑结构,如图2所示。它包含7大构件:固定杆1,转臂2,两个行星轮3和6,太阳轮4,齿圈5,第7构件(第2行星排的齿圈、太阳轮或转臂中之一)。具有10个运动副:4个齿轮副(其中包括2个外齿副,2个内齿副),6个转动副。4个独立构件(两个离合器CL1与CL2和两个制动器B1与B2)与固定构件(齿轮箱)邻接,其中至少一个构件与发动机连接,一个构件与电机连接,一个构件与输出端连接。
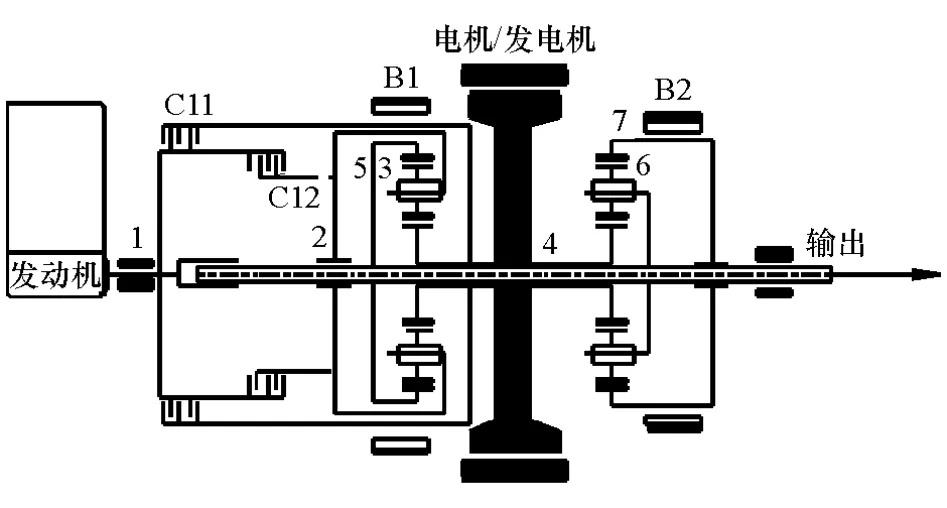
图2 单电机并联混合传动系统拓扑结构图
2 机械创新设计方法
机械创新性设计方法[10]包括5个步骤:一般化、特定化、具体化、动力输入输出分析和运行模式分析,其流程如图3所示。
2.1 一般化规则
根据图1(b)构型拓扑结构图和机械创新性设计一般化设计规则[10],固定杆(构件1)关联着4个运动副,释放并一般化为具有4个运动副的构件,简称为4副件(以下的2副件、3副件同义);转臂(构件2)与3个运动副关联,一般化为3副杆;同理行星轮(构件3,6)一般化为3副杆;太阳轮(构件4)一般化为3副杆;齿圈(构件5)和第7构件(第2行星排的齿圈)一般化为2副杆;固定杆与转臂、固定杆与太阳轮、固定杆与齿圈、转臂与行星轮和固定杆与第7构件(齿圈)之间运动副皆一般化为JR(转动副);行星轮与太阳轮之间的运动副一般化为JGo(外齿轮副);行星轮与环齿轮(齿圈)之间的运动副、第7构件与行星轮之间运动副一般化为JGi(内齿轮副)。最后得到图1(b)的运动链图如图4所示。
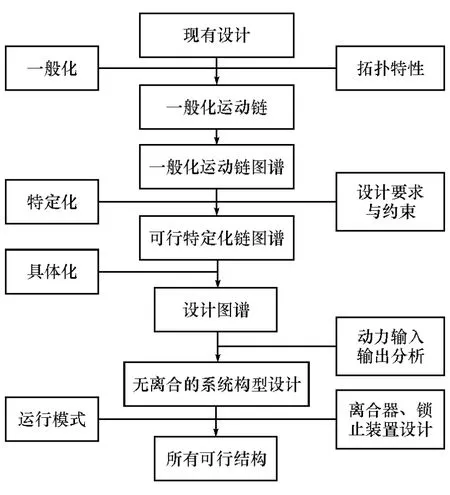
图3 机械创新设计流程图

图4 一般化运动链图
通过图1(b)构型拓扑图的运动链分析得到7杆10运动副运动链,查询一般化链图谱[9],得到(7,10)一般化链图谱,如图5所示。
2.2 设计约束分析
对图1(b)的行星齿轮进行结构特性分析,可得到其设计约束[11]如下。
(1)固定杆(构件1)
在每个行星齿轮机构中必有一杆为固定杆;固定杆必须至少是一个4副杆;为避免机构退化,固定杆不能包含在三杆回路中;除了行星齿轮,其余任何连接都必须与固定杆连接。
(2)转臂(构件2)
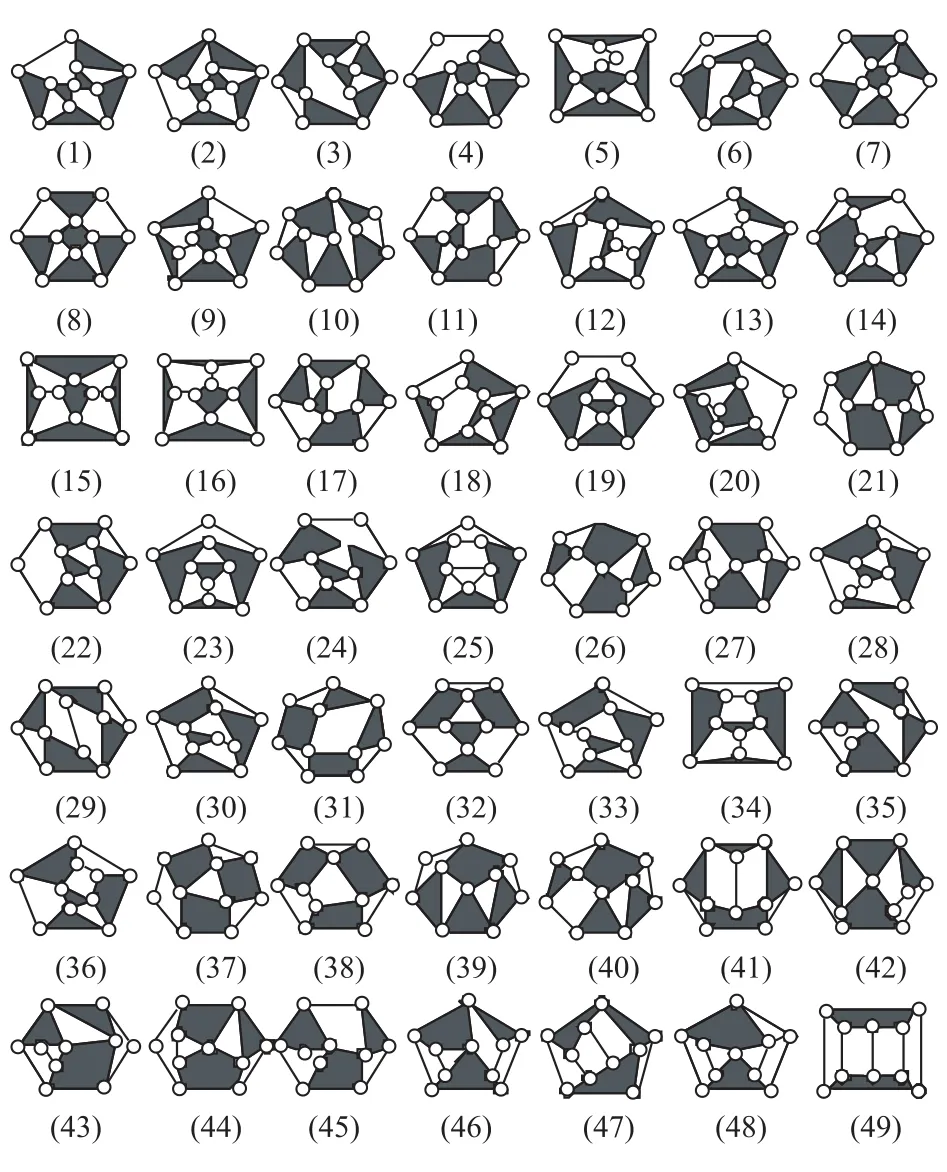
图5 (7,10)一般化运动链图谱
每1个行星轮都有转臂支撑;转臂机构必须与和它邻近的行星轮连接,同时与固定杆连接。
(3)行星轮(构件3和6)
在行星齿轮机构中需有2个单独的行星轮;行星轮与固定杆不相邻;1个行星轮至少有2个齿轮副和1个转动副(转动副与转臂伴随),是一个多重连接;行星轮机构不能包含在三杆回路中。
(4)太阳轮(构件4)
行星齿轮机构中至少有1个构件为太阳轮;太阳轮必须与固定杆和行星齿轮连接。
(5)齿圈(构件5)
在行星齿轮机构中必须有1个构件为齿圈;齿圈必须与固定杆和行星齿轮连接;第7构件可以为齿圈、太阳轮或转臂。
(6)转动副(JR)
通过计算,必须有6个转动副;每一个构件都必须至少有1个转动副;每1个与固定杆邻接的运动副都必须为转动副;转臂与行星轮之间的运动副为转动副;1个行星轮至少有1个转动副;转动副之间不能形成三杆回路。
(7)齿轮副(JG)
通过计算,必须有4个齿轮副,包括2个外啮合齿轮副与2个内啮合齿轮副;太阳轮与行星轮之间的运动副为外啮合齿轮副;齿圈与行星轮之间的运动副为内啮合齿轮副;齿轮副之间也不可能形成三杆回路。
2.3 特定化分析
将一般化运动链根据设计要求进行特定化以后,即成为特定化链,满足设计约束的特定化链称为可行特定化链。分析所有构件与运动链的类型,考虑其设计约束以获得特定化链,步骤如下。
(1)分配接地连接(1),至少为一个4重连接作为主框架,根据其它设计约束,只有3个广义运动链满足要求,分别是图6中的(15),(36)和(49)。
(2)分配行星齿轮(3,6),根据上一步结果,考虑设计约束,得到其可行运动链A,B和C,如图6所示。
(3)分配太阳轮转臂(2),根据设计约束得到a与b,如图6所示。
(4)分配太阳轮与齿圈(4,5),根据上一步结果,考虑设计约束,得到可行运动链,分配剩余第7构件。 得到 a(1),a(2)和 a(3)与 b(1),b(2)和b(3),如图6所示。

图6 具体化过程
(5)分配转动副与齿轮副(外啮合与内啮合齿轮副),得到 α1-α16与 β1-β13,如图 7所示。
通过特定化过程,且受限于设计约束,可以得到29种特定化链图,去除其中同构的特定化链,最终得到12种可行特定化链,通过逆序运用一般化规则,将每一个可行特定化链具体化[12],以获得与其对应的行星轮系的机构简图,如图8所示。
2.4 动力输入输出分析
针对图1,考虑到输入源与输出源的各种限制[5],按照下列步骤分配动力输入输出端。
(1)分配输出端,行星齿轮机构中需要一个构件与输出端连接,且为保持电机单独驱动时有较高的转矩传递,输出端至少要连接在一个转臂上。
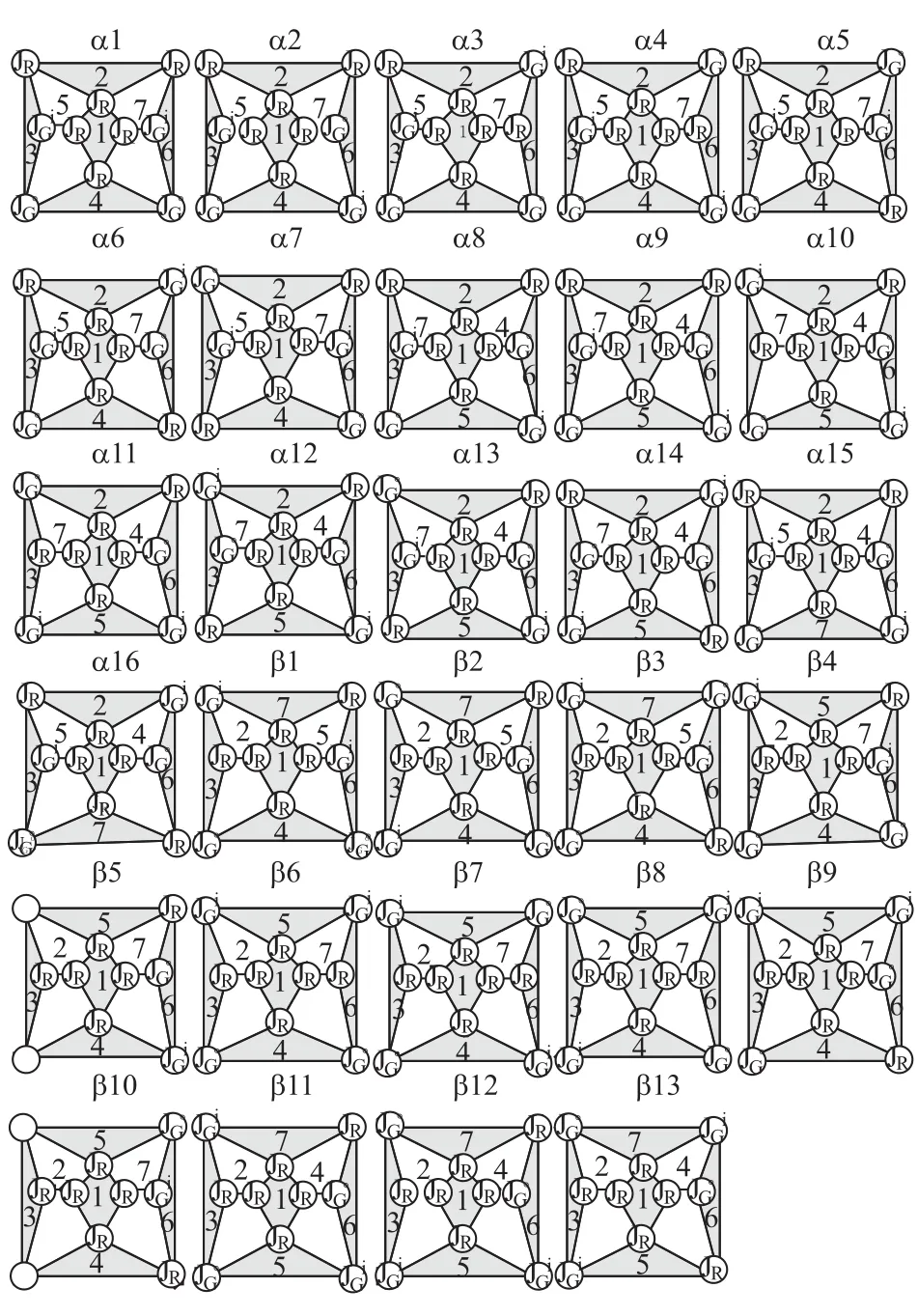
图7 可行特定化链图谱
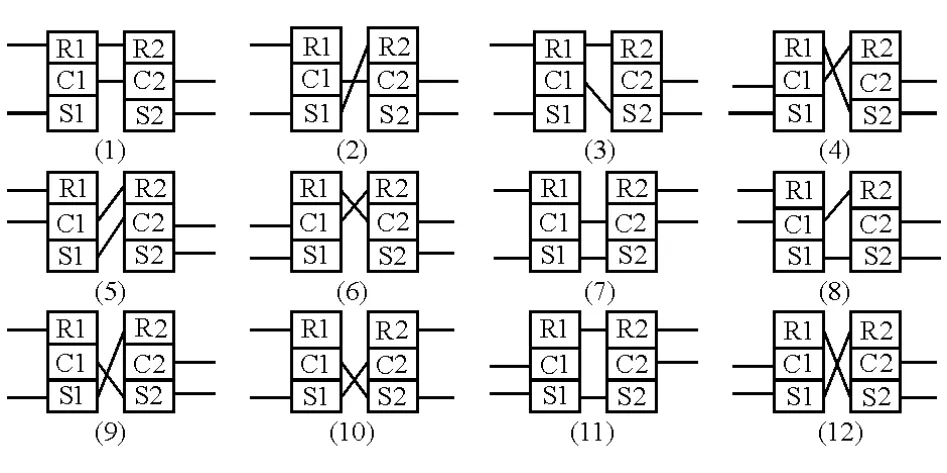
图8 7杆并联混合动力汽车传动系统行星机构简图
(2)分配电机,为在输出轴上维持较高转矩,电机轴只能连接齿圈或太阳轮;如果两个行星排的太阳轮连接在一起,则必须连在电机上。
(3)分配发动机,剩余的连接都可与发动机连接,并要保证分配完其余动力源。
其中共有12种具体结构示意图,由于种类很多,故只选择图8中的(4)作下一步示例分析,得到16种动力输入输出分配,如图9所示。

图9 动力输入输出分配
受设计约束的限制,按照上述步骤进行动力源输入输出分配。第1步分配输出端,得到4种结构,如图9 中(4-1),(4-2),(4-15)和(4-16)所示;第2步分配电机,得到8种带有输出端与电机结构,如图9中的(4-3)-(4-6)和(4-17)-(4-20)所示;第3步分配发动机,将发动机分配到剩余连接中,最后得到16种无离合器并联混合动力汽车传动系统结构,如图9中的(4-7)-(4-14)和(4-21)-(4-28)所示。选取图9中上半部分(4-7)-(4-10)和下半部分(4-21)-(4-24)共8种无离合器并联混合动力汽车传动系统结构作下一步运行模式分析。
2.5 运行模式分析
基于并联混合动力汽车所需的各个运行模式,须加入离合器与制动器[13],设计过程如下。
(1)电机单独驱动模式:此时发动机不能直接连接传动系统,系统为1自由度,制动器1用于控制系统,离合器1用于分离发动机轴与传动系统。
(2)发动机单独驱动模式:此时发动机连接传动系统驱动输出轴,系统需为1自由度,需制动器来控制,且由于每个系统都有几种发动机驱动模式,在一些运行模式下电机甚至处于空转状态,因此须加入多个制动器;其中制动器2锁止电机轴,制动器3为保证进行第2步时,系统为1自由度;当每个系统中加入的离合器与制动器满足所有的运行模式,多余的离合器与制动器可以省略。
针对图9中的(4-7)-(4-10),按照动力输入输出分配步骤,首先根据电机单独驱动模式安放离合器 1 与制动器 1,得到(a1),(a2),(b1),(b2),(c1),(c2),(d1)和(d2);然后根据发动机单独驱动模式分析,安放离合器 2、制动器 2和 3,得到(a3),(a4),(b3),(b4),(c3),(c4),(d3)和(d4);由于离合器控制行星排自由度,单行星排只需1个制动器,其余可省略,如(a3)中的B1与B3重复,即可省略B1,最后得到可行结构为(a5),(b5),(c5)和(d5),如图10所示。

图10 运行模式管理分析
同理,针对图9中(4-21)-(4-24),进行各个动力源的分配,通过运行模式分析,去除同构类型后最后得到了(e3),(f5),(g4)和(h3)4种可行构型,如图11所示。
将图8中的12种可行传动结构示意图按照上述过程,通过输入输出分配、运行模式的分析,合理地进行输入输出和离合器与制动器分配,最终可得132种单电机并联式混合动力汽车传动系统构型。
3 新构型分析
选取图11中(g4)作为示例,分析其合理性。通过离合器与制动器状态选择,获得电机单独驱动、发动机单独驱动、混合驱动、功率分流、制动能量回收和怠速充电共6种模式,能量流动如图12所示。
单行星排为2自由度机构,包含了齿圈(R)、太阳轮(S)与转臂(C),当其中某部分为固定连接时,单行星排输出与输入的转速和转矩关系式[14]如表1所示。

图11 运行模式管理分析

图12 运行模式下的能量流简图

表1 单行星排输入输出的转速比与转矩比
3.1 电机单独驱动模式
B1接合,其余断开。电机与S2连接,单独提供驱动力,能量流动如图12(a)所示。输入输出转速转矩为

式中:ωoutput和 ωm分别为输出端与电机的角速度;Toutput和Tm分别为输出端和电机的转矩;NR1和NS1分别为第一行星排中齿圈和太阳轮的齿数。
3.2 发动机单独驱动模式
(1)发动机单独驱动模式1
B1和CL2接合,其余断开。发动机单独提供驱动力,能量流动如图12(b)所示。输入输出转速转矩为

(2)发动机单独驱动模式2
B1和CL1接合,其余断开。发动机通过两级齿轮减速后来驱动车辆,且S1作为一个固定构件,电机空转,能量流动如图12(c)所示。输入输出转速转矩为
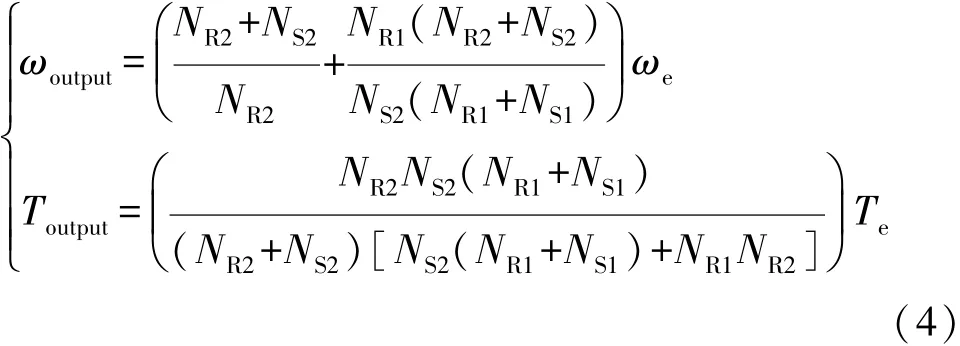
式中:ωe和Te分别为发动机的角速度和转矩;NR2和NS2分别为第二行星排中齿圈和太阳轮的齿数。
(3)发动机单独驱动模式3
CL1和CL2接合,其余断开。行星齿轮锁止为单自由度装置,发动机单独驱动,能量流动如图12(d)所示。输入输出转速转矩为

(4)发动机单独驱动模式4
CL1和B2接合,其余断开。S2作为一个固定构件,电机停止运转,能量流动简图如图12(e)所示。输入输出转速转矩为
3.3 混合驱动模式
(1)混合驱动模式1
B1和CL2接合,其余断开。S1作为减速构件,发动机与电机同时提供驱动力,能量流动如图12(f)所示。输入输出转速转矩为

(2)混合驱动模式2
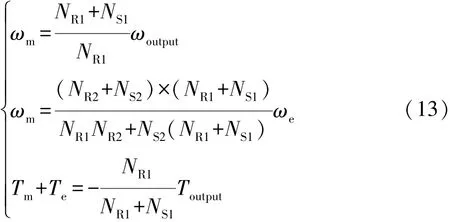
B1和CL1接合,其余断开。电机与发动机各自提供驱动力,能量流动简图如图12(g)所示。输入输出转速转矩为

(3)混合驱动模式3
CL1和CL2接合,其余断开。电机与发动机同时驱动车辆,能量流动简图如图12(h)所示。输入输出转速转矩为

3.4 功率分流运行模式
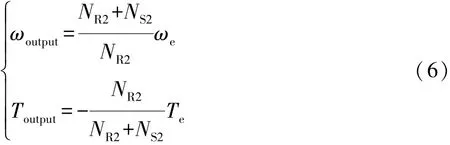
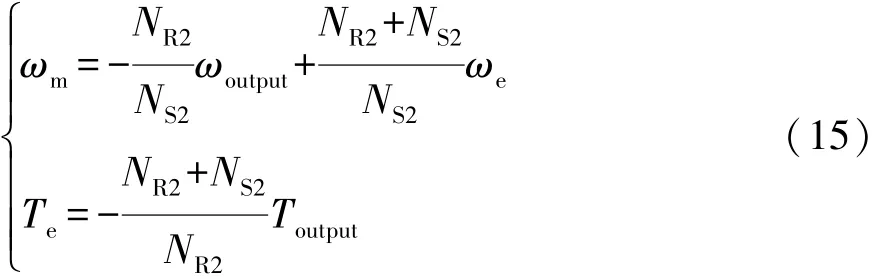
中高速行驶时,只有CL1接合,其他断开。第2行星排作为一个功率分流装置(2自由度),一部分能量通过R2驱动车辆,另一部分能量通过S2驱动电机,此时电机作为发电机运行,输出速度通过控制发电机的转速与负载来控制,使之运行在最佳区域,其能量流动如图12(i)所示。输入输出转速转矩为

3.5 制动能量回收模式
(1)制动能量回收模式1
B1接合,其余断开。此时所有能量通过发电机转化为电能对电池进行充电,发动机空转或怠速,能量流动如图12(j)所示。输入输出转速转矩为

(2)制动能量回收模式2
B1和CL2接合,其余断开。电机与发动机都提供制动效果,能量流动如图12(k)所示。输入输出转速转矩为

(3)制动能量回收模式3
B1和CL1接合,其余断开。电机与发动机也都提供制动效果,能量流动如图12(l)所示。输入输出转速转矩为
(4)制动能量回收模式4
CL1和CL2接合,其余断开。此时行星齿轮结构变成1自由度,电机与发动机都提供制动力,能量流动如图12(m)所示,输入输出转速转矩为

(5)制动能量回收模式5
只有CL1接合,其余断开。此时为功率分流式充电模式,能量流动如图12(n)所示。输入输出转速转矩为
3.6 怠速充电模式
输出轴用机械制动固定,CL1或者CL2接合。发动机直接驱动发电机,对电池充电,便于下次使用,太阳轮S1空转,能量流动如图12(o)所示。
4 结论
(1)从两种单电机并联混合动力汽车传动结构出发,将其转换为运动链形式,通过构件数与运动副数量得到一般化运动链。
(2)根据设计约束,将一般化链具体化,分配各个构件和运动副,得到29种可行运动链图,去除同构类型,转化为具体结构最终得到12种传动系统示意图。
(3)通过输入输出分析与运行模式管理分析,从12种传动系统示意图中分配电机、发动机和输出轴,按照运行模式约束分配离合器与制动器。选取其中1种构型进行分析,得到了4种可行构型。衍生到上述12种耦合结构,获得了132种构型。
(4)选取其中1种新构型验证其运行模式和工作模式下的能量流动,获得15种离合器与制动器状态组合,并归纳为6种基本运行模式:电机单独驱动、发动机单独驱动、混合驱动、功率分流、制动回收和怠速充电。
