基于机器视觉的注塑空瓶缺陷检测系统
2018-10-13陈儒侠任德均严扎杰高永勋付兴勇
陈儒侠,任德均,严扎杰,高永勋,付兴勇
基于机器视觉的注塑空瓶缺陷检测系统
陈儒侠,任德均,严扎杰,高永勋,付兴勇
(四川大学制造科学与工程学院,四川 成都 610065)
为了利用数字图像处理技术实现对注塑空瓶缺陷的自动检测,根据注塑瓶制造生产线的工作环境和检测要求,对注塑空瓶缺陷的光学特征进行分析,将注塑瓶空瓶检测分为3个工位检测,分别是瓶底检测、瓶身检测和瓶口检测。研究了检测过程中的图像获取、图像预处理、图像匹配、外围设备通信控制和可视化操作等关键技术,实现了一个适用于车间、基于机器视觉的在线生产检测的空瓶缺陷检测系统。测试显示,该视觉系统实时性好、可靠性高,能准确检测出有缺陷的不合格的空瓶并及时剔除,有效地提高了生产线的工作效率。
机器视觉;数字图像处理技术;图像预处理;图像匹配
1 引言
随着市场对注塑空瓶质量和数量的需求日益增加,近年来,该行业得到快速发展。但是国内大多数产品质量检测主要依靠人工方法,传统人工检测的缺陷有:①检测速度慢、效率低,无法满足高速自动化生产线需求;②检测精度低,检测质量受人为因素影响,错检率、误检率较高;③劳动强度大,工作环境差;④人力资源浪费,无法满足当前工业现代化管理要求[1]。本文研究的正是基于某注塑空瓶生产企业的实际需求,研发的一套以机械、电气、软件、图像等技术为基础,结合各种辅助器件协调工作,实现检测并剔除有缺陷空瓶的自动化在线注塑瓶缺陷检测系统。
2 空瓶检测系统组成
根据目前用户需求,设计了基于机器视觉的一个高精度、高速度、非接触性的空瓶检测系统。在自动化生产线上,该系统将需要检测的空瓶分为瓶底、瓶身、瓶口3个工位进行检测。当空瓶运动到检测工位时,图像采集系统对空瓶高速拍照,获取的图像传送到工控机并进行算法处理;根据3个工位的结果得出最终结果,通过PLC向剔除装置发出信号,将不合格产品剔除。基于机器视觉的空瓶缺陷检测系统如图1所示。

图1 系统整体结构
2.1 图像采集设备
空瓶检测系统需要多方面紧密配合。首先,图像采集设备必须能采集到高质量的图像,以满足空瓶缺陷检测精度要求,并且光源的光照均匀、具有较长的使用寿命。在注塑瓶质检系统中,结合检测部位的几何特征,同时考虑到被检测对象材质的表面容易反光,因此瓶底与瓶口采用低角度环形光源进行照明,而瓶身采用面光源进行照明。为了满足检测精度,选择了分辨率为1296px×966px 即130万全局曝光的黑白相机,其内部感光芯片型号为Sony公司的ICX445芯片,采用千兆网接口。由于外界环境对于图像的质量以及算法处理影响很大,所以设备采用封闭的图像采集环境,尽可能地排除外界环境对成像的干扰,保证获取到质量稳定的图像。
2.2 控制设备
根据用户需求,实现控制设备与计算机的信息交互,接收主机的控制命令,驱动执行机构对不合格产品的剔除、修改外接设备的参数以及收集外围系统的状态,并将信息及时反馈给工控机,以便及时作出相应的调整。考虑速度、稳定性和通用性等因素,采用可编程逻辑控制器(PLC)作为底层控制的核心部件,并与主机采用RS485串口通讯接口进行数据传输[2]。本系统由1台S7-300的PLC实现对光源控制器、相机、传送带、设备报警指示器、传感器、剔除气缸等部件的实时控制。
2.3 系统软件设计
本系统的开发平台建立在微软公司Windows7操作系统上,所有关于目标对象的图像处理算法使用MATLAB完成,人机交互界面采用面向对象的C#编程语言编写。其主要功能模块包括:图像采集模块、算法处理模块、通讯控制模块和系统控制模块。图像采集模块负责对图像采集设备进行控制,比如拍照时间、曝光时间、相机的参数设置和图像数据的传输与存储。算法模块主要针对一定类型不同大小的检测对象,具有建模和检测的功能。通讯模块主要实现数据的交换。系统控制模块主要负责以上3个模块的协同工作、监控系统的运行状态,并根据情况进行调整和记录检测结果等。
3 缺陷检测原理及图像处理方法
3.1 缺陷检测类型
本系统的空瓶缺陷检测算法与缺陷的类型和光学特征息息相关。本文以瓶底检测为例,实际生产注塑瓶瓶底缺陷主要有砂眼、孔洞、字符检测、瓶底污渍等。瓶底砂眼如图2所示。

图2 瓶底砂眼
3.2 基于特征点的图像配准算法
在基于特征点的图像配准算法中,特征的选取是基础,所有几何计算都是在此基础上进行的,将直接关系到算法。同时,特征点的选取是在人工经验的基础上进行的,因此,所选取的特征点应该要相对邻域内的其他点有某些奇异性[3]。根据实际瓶底特征选取“S9 P&G 11”字符作为特征点来计算每个图像的偏移量,具体计算流程为图像截取→阈值分割→形态学处理→边界提取。
首先,选取的特征点为模腔字符“S9 P&G 11”,结合其在瓶底原始图像中的成像特点与图像灰度值特征,来移动有效检测区域的起始坐标和终点坐标,确定包括瓶底字符信息在内的最小外接矩形,同时考虑在进瓶阶段传送带的不均匀运行造成的瓶底位置的细小位置变化,适当地向外扩展几个像素点的距离,就得到了相对合理的ROI有效处理区域,瓶底字符图像如图3所示。
图像增强以后,字符图像与邻域内的背景图像对比度非常大,所以基于灰度值的阈值分割就是一个快速且方便的方法[4]。采用固定阈值方法,取该ROI区域内的图像灰度平均值,然后再加一个固定的阈值作为偏移量,再将处理区域图像的每个像素点的灰度值与该偏移量进行大小比较,当大于时该像素点灰度值赋值为1,否则赋值为0,瓶底字符区阈值分割图如图4所示。
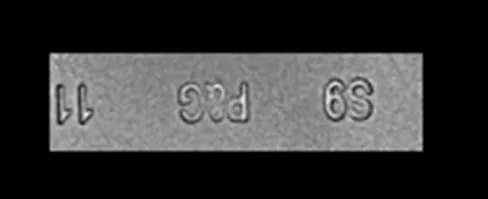
图3 瓶底字符图像

图4 瓶底字符区阈值分割图
然后经过形态学处理,一般的形态学处理的对象都是基于二值图像,因为这种图像的各个分量是Z2(图像中所有有序像素对的集合)的元素,形态学处理的基础是腐蚀和膨胀,从数学方面来说膨胀或者腐蚀都是将图像与核做卷积运算[5]。开运算是先腐蚀后膨胀的过程,腐蚀的作用收缩或细化,膨胀的作用是“增长”或“粗化”二值图像中的物体。通过开运算得到平滑经过图像增强以后的二值图像中目标图像区域的轮廓,打断细长的区域并去除图像轮廓中面积小于结构元素的细节部分,开运算后的图像如图5所示。
通过上面的形体学操作处理以后,在瓶底检测模块中,截取的ROI区域的背景基本为黑色,灰度值在0~15内,瓶底字符区域的特征相对背景对比度很大,可以通过字符的面积特征直接将其选中。在开运算的基础上通过选择面积为20~99 999的所有对象,获取到的字符如图6所示。

图5 开运算后的图像

图6 通过面积特征所选取的字符图像
3.3 图像相减法
瓶底序列图像完成图像预处理以及通过利用瓶底图像上模腔信息字符固有特征,经过几何空间变换计算出每张图像基于第一张基准图像的几何位置偏移量,并将其平移到指定位置。
检测主要采用的方法是图像相减法,即在两幅图像相对应像素点之间做减法运算,从而得出两幅图像之间的差异,如果相减后的差值在差值允许范围内,则判断瓶底质量合格,否则判定为质量不合格。图像相减法数学表达式如下:

由于瓶底的缺陷主要是砂眼和孔洞,因此其检测思路为:在注塑瓶质检系统采集序列图像稳定以后,首先采集一定数量的合格的瓶底照片,经过图像预处理、图像增强、仿射变换以后做加权平均运算,求一个类似于该系列注塑瓶底“平均图像”的一个基准图像。与在线实时采集的图像做减法运算,根据所得差值判定该瓶底质量是否合格,其流程图如图7所示。
利用上述方法,同时对瓶口、瓶底、瓶身进行缺陷检测,如果有一项检测结果超标,则认定为不合格产品。

图7 图像相减法流程图
4 系统测试
利用上述算法,实现了对注塑空瓶的在线检测。该瓶底为典型的砂眼,可以计算出该砂眼的大小为32个像素,超过标准瓶的预设值,因此可判断该瓶不合格(NG),同时系统控制模块会剔除该缺陷瓶。注塑瓶底砂眼的检测效果如图8所示。
在系统运行时间方面,实际生产线的检测速度一般需要达到10 800瓶/h或者更高,本系统初步确定的是3瓶/s,也就是每个工位的检测时间为300 ms,因此要合理地分配运行时间,保证整个系统的处理速度。PLC和气动控制部分约占用50 ms,PLC调度生产线时间约为30 ms,最后分配给图像采集与算法处理的时间为220 ms。利用本系统检测能够满足生产中对注塑空瓶的检测要求。

5 结束语
文中设计的基于机器视觉的注塑空瓶缺陷检测系统实现了高速自动化生产线注塑空瓶的缺陷检测,且具有结构简单紧凑、成本低廉、操作简单、检测速度快等优点,其检测效果远高于人工检测效果。
[1]段峰,王耀南,雷晓峰,等.机器视觉技术及其应用综述[J].自动化博览,2002(03):59-62.
[2]李耿,宗光华.PC机与PLC串行通信的实现[J].微计算机信息,2012,18(4):8-9.
[3]谢九成.医学图像配准技术及应用研究[D].长沙:湖南大学,2008.
[4]阳树洪.灰度图像阈值分割的自适应和快速算法研究[D].重庆:重庆大学,2014.
[5]Anon.Fast moving cigarette carton lines takes to Easy Max[J].Folding Carton Industry,2006.
〔编辑:严丽琴〕
2095-6835(2018)19-0013-03
TP391.41
A
10.15913/j.cnki.kjycx.2018.19.013
陈儒侠(1993—),男,四川南充人,硕士研究生,主要研究方向为机器视觉。任德均(1971—),男,四川成都人,博士,副教授,主要研究方向为机器视觉、嵌入式控制系统、机电一体化。严扎杰(1994—),男,藏族,甘肃舟曲人,硕士研究生,主要研究方向为嵌入式控制系统。高永勋(1991—),男,河南郑州人,硕士研究生,主要研究方向为机器视觉。付兴勇(1990—),男,山东菏泽人,硕士研究生,主要研究方向为机器视觉。
