基于D-H矩阵计算的工业六轴机械手末端定位的精准度
2018-10-09李嘉琪陈海彬
李嘉琪,陈海彬,钟 辉,刘 宇
(1.东莞理工学院,广东东莞 523808;2.广东汇兴精工智造股份有限公司,广东东莞 523888;3.中国科学院高能物理研究所,广东东莞 523000)
0 引言
近年来,随着“机器换人”政策的深度落实,六轴机械手广泛运用于自动化工厂的加工生产中。机械手末端定位的精准度直接关系到工件的质量,不同品牌的机械手存在不同程度的定位误差,而造成机械手末端定位误差的原因有很多。本文作者研究的是各关节转动一定角度后,机械手末端的位置与姿态的总误差。
1 D-H矩阵中物体位置与姿态的表达方法[2]
常用的六轴工业机械手通常用矩阵T来表示末端的位置与姿态:
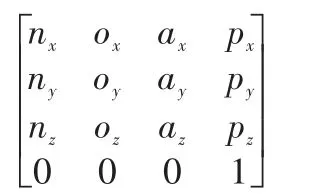
其中:[pxpypz]T表示机器手末端位置;
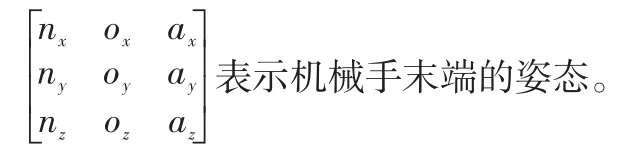
姿态包括了第一列的[nxnynz]T,分别表示Xn轴对基础坐标系X轴、Y轴、Z轴的方向余弦值;第二列的[oxoyoz]T,分别表示Yn轴对基础坐标系X轴、Y轴、Z轴的方向余弦值;第三列的[axayaz]T,分别表示Zn轴对基础坐标系X轴、Y轴、Z轴的方向余弦值。
2 D-H坐标系的建立与相邻坐标系原点的关系[3]
在每一根轴的初始端,即电机位置建立一个坐标系,如图1所示。由于基座不发生转动,所以将基座与第一根轴合成一体,坐标建立在基座底面圆的圆心处,作为基础坐标系。
从基础坐标系到末端方向的坐标系分别命名为a1(基础坐标系)、。机械手末端在a6的位置坐标命名为T6,a6的原点在a5中的位置姿态坐标命名为T5,a5的原点在a4中的位置姿态坐标命名为T4,以此类推。

图1 工业六轴机械手
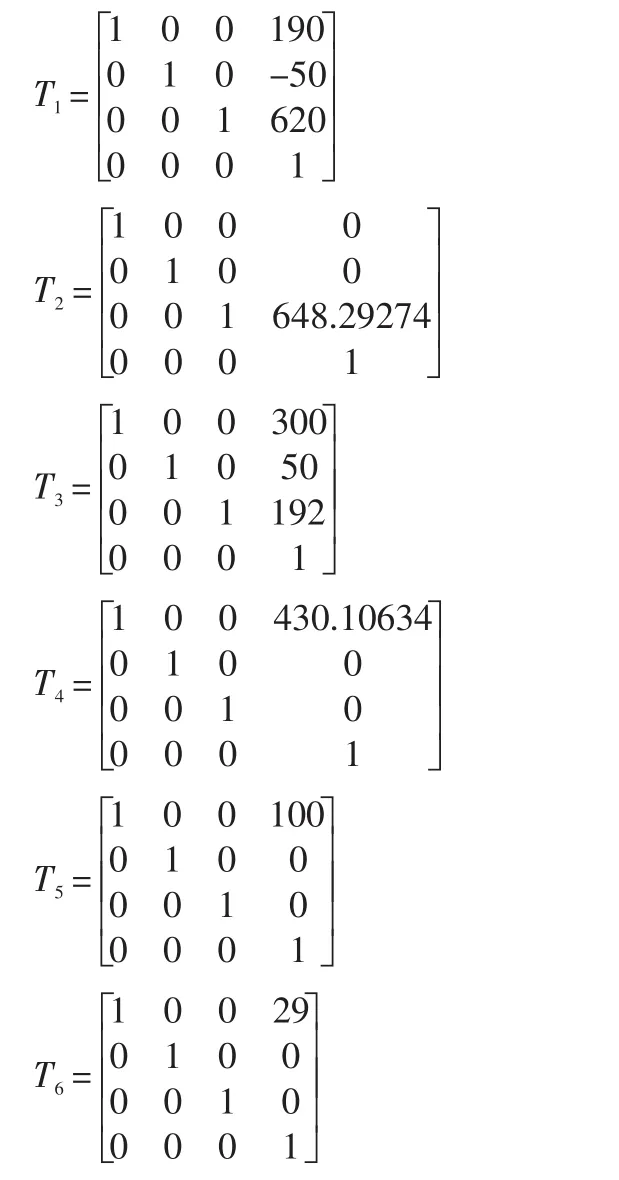
经观察测量,当机械手处于图1所示的零点位置时,可获得:
3 D-H矩阵的计算过程及结果
机械手末端的相对于a5的位置,采用间接法计算,即用T末左乘T5,便可以得到末端在坐标系5中的位置姿态矩阵,那么机械手末端在基础坐标系中的位置坐标,就可以通过下面公式获得[6]。

4 计算每个轴旋转45°后的坐标矩阵[7]
绕X轴旋转的变换矩阵:
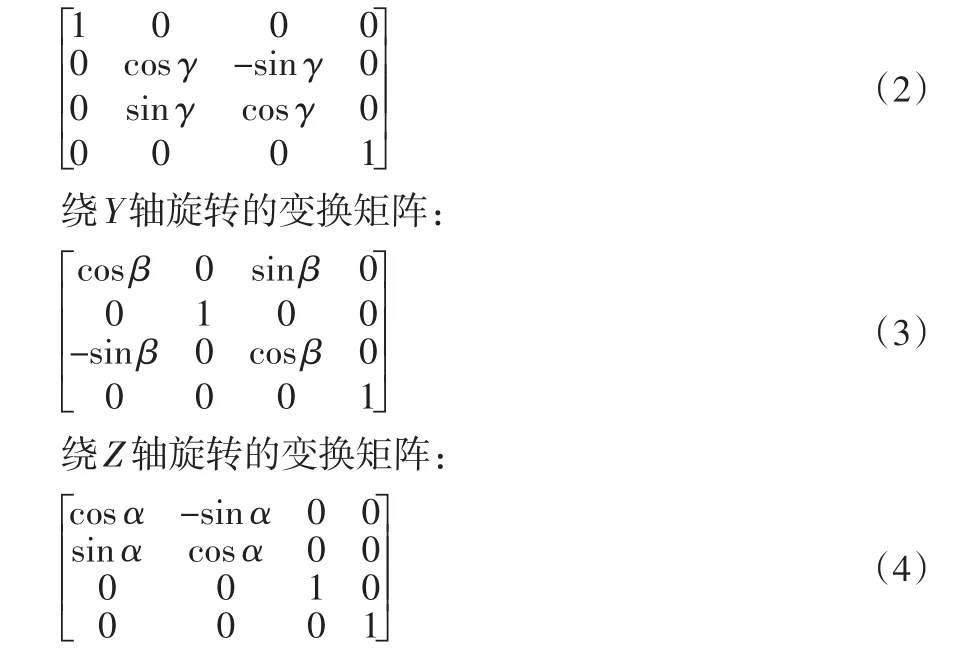
根据图1与式(2)-(4)分析,可得各关节旋转45°后的变换矩阵:
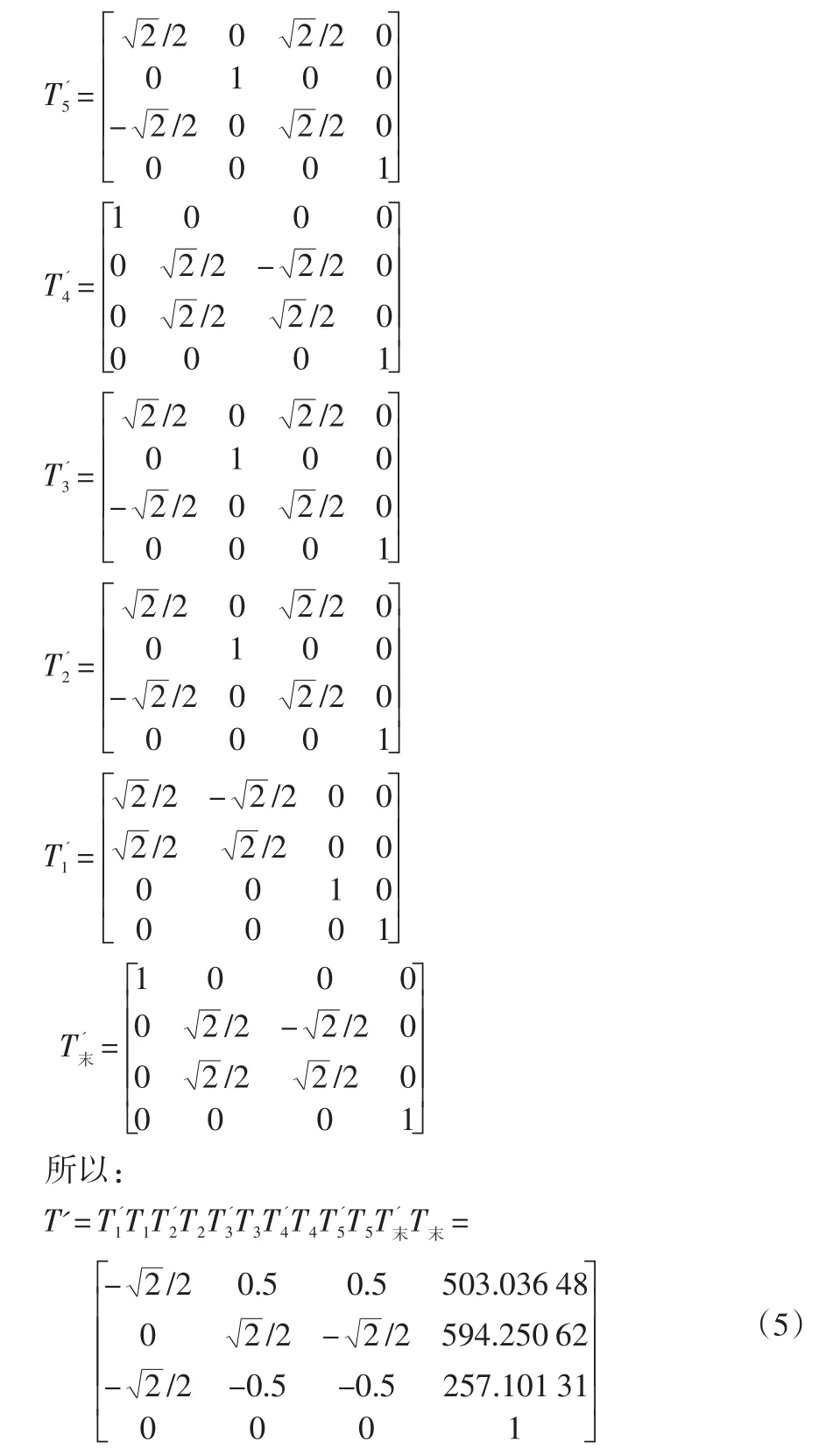
已经欧拉变换矩阵[7]

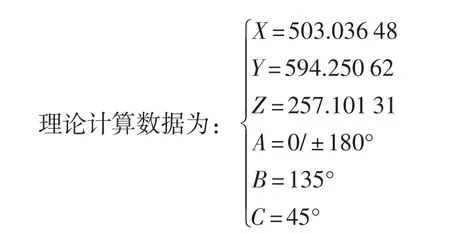
因此计算得各关节转动45°后机械手末端的位置姿态为

5 实验验证
图2、3所示分别为机械手在零位时的姿态与相关数据。图4、5所示为机械手各关节转动45°后的姿态与相关数据。


图2 机械手在零位时姿态
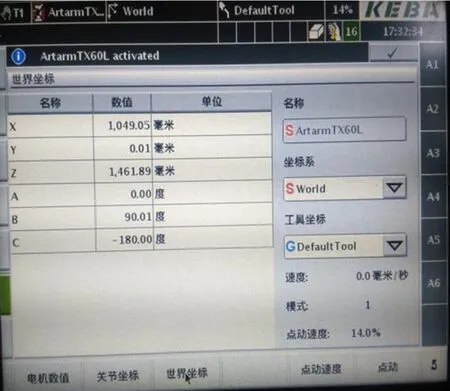
图3 零位时的位置姿态数据

图4 机械手转动后的姿态

图5 转动后的位置姿态数据
6 小结
观察比较实验结果与理论结果,仅在XYZ位置上存在略微偏差,通过这一系列的计算与实验,验证运用D-H矩阵来计算机械手末端的理论位置姿态的可行性。运用这一算法以及更加精密的测量仪器,可以测量统计出往复运动后的积累误差以及发生误差的关节等,用于判断机械手的精密度。
