紧扣图形特征 揭示问题本源
2018-09-19王松
王 松
(湖北省武汉市武汉第三寄宿中学)
笔者在研读近几年有关中考命题、解题类文章时,发现很多有关“共顶点三角形旋转”模型的文章,一直困惑于此模型的辅助线是如何产生的?本文以一道几何题为线索,从图形位似的角度,谈谈自己对此类问题的理解.
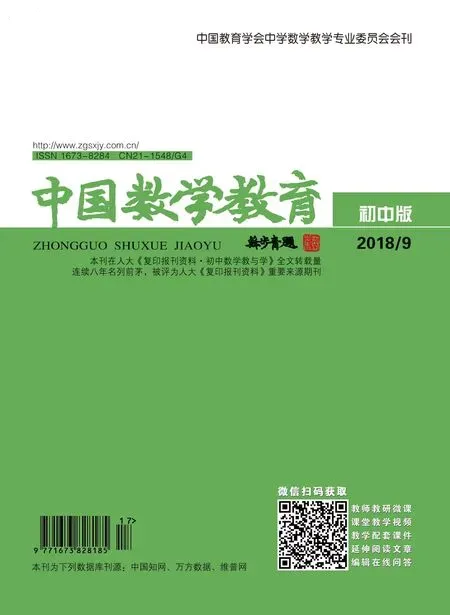
题目如图1,在等腰直角三角形ABC中,AC=,点P在以斜边AB为直径的半圆上,M为PC的中点.当点P沿半圆从点A运动至点B时,点M运动的路径长是( ).
(B)π
(D)2
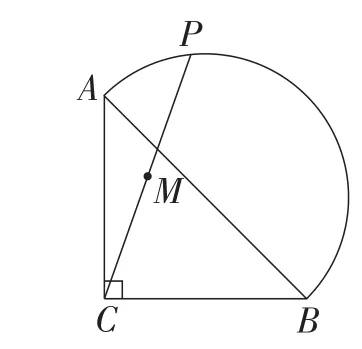
图1
一、问题起源
人教版《义务教育教科书·数学》九年级下册第27章第3节“位似”中给出了位似的概念.依据题目给出的条件不难判断动点P和动点M的连线都经过同一点C,且,故可以判定点P的运动轨迹与点M的运动轨迹是以点C为位似中心,位似比为2∶1的位似图形.进而可知点M的运动轨迹是以1为半径的半圆,其路径长为π.
显然,对于平面内一定点O和动点P,连接OP,在线段OP上取一点Q,始终满足(k为定值).如果规定动点P在一条确定直线l上运动时(如图2),依据位似的定义可知,点Q的运动轨迹必为一条与直线l平行的直线.进而,若点P的运动轨迹为直线l上某一线段PP1时,点Q的运动轨迹必为一条平行于线段PP1的线段QQ1,且有QQ1=k·PP1.如果规定动点P在一确定⊙R上运动时(如图3),依据位似的定义可知,点Q的运动轨迹必为一个圆(其圆心R1与点R,O三点共线),且有C⊙R1=k·C⊙R.
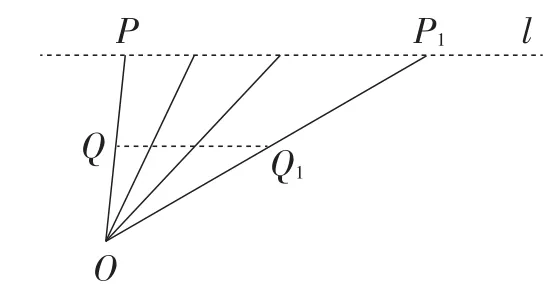
图2
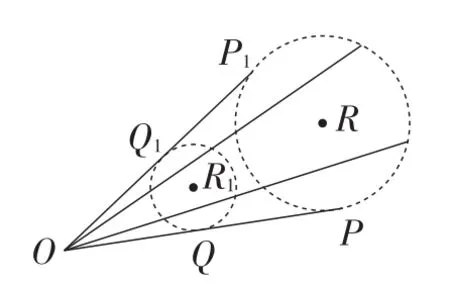
图3
当然,动点P的运动轨迹可以定义为任意轨迹,动点Q的运动轨迹将始终保证与动点P的运动轨迹关于定点O成位似图形,由于情况多样而本质不变,故不再赘述.
二、问题变式
变式:对于图2中的问题,若将点Q绕着点O顺时针旋转α(0<α<360°),且α≠180°,其他条件不变.
(1)如果规定动点P在一条确定直线l上运动时(如图4),依据前面的论述,点Q的运动轨迹必为一条与直线l相交的直线,其夹角之一为α.
理由如下:在图4中,直线PP1与直线QQ1交于点T,由于,∠POQ=∠P1OQ1=α,易证得△POQ∽△P1OQ1,△POP1∽△QOQ1.故∠TPO=∠TQO.证得∠T=∠POQ=α.进而,若点P的运动轨迹为直线l上某一线段PP1时,点Q的运动轨迹必为一条线段QQ1,此时QQ1=k·PP1.同时还可以发现其本质为图2中△QOQ1整体绕点O顺时针旋转α后即为图4中的△QOQ1.
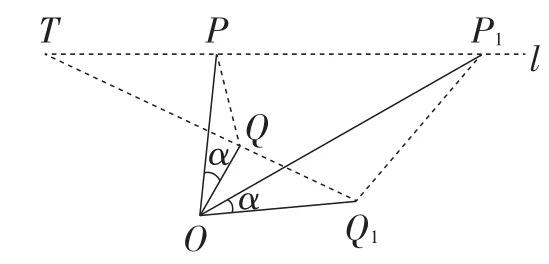
图4
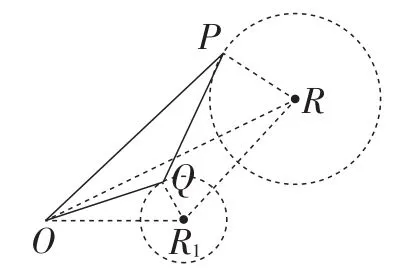
图5
(2)如果规定动点P在一确定⊙R上运动时(如图5),依据前面的论述,点Q的运动轨迹可以看作是图3中的⊙R1绕点O顺时针旋转α后得到的一个圆,且有C⊙R1=k·C⊙R.理由如下:如图5,连接OR,作∠ROR1=α,并使得,易证△POQ∽△ROR1,△POR∽△QOR1.得.故可以得到点Q在以R1为圆心,k·PR为半径的圆上运动,故
显然,当动点P的运动轨迹为⊙R上的一段弧时,动点Q的运动轨迹也应为一段弧,同时两段弧所对的圆心角相等,弧长之比等于k.
在上述证明过程中,证得△POQ∽△ROR1.同时观察发现点O为这对相似三角形的公共顶点,P,Q这对对应点同为运动过程中的动点,R,R1这对对应点同为圆心,此规律也为我们解决相关问题提供了依据.
例1如图6,在△ABC中,∠ACB=90°,CA=CB=4,CD⊥AB于点D,P是CD上一个动点,以点P为直角顶点向下作等腰直角三角形PBE,连接DE,求DE的最小值.
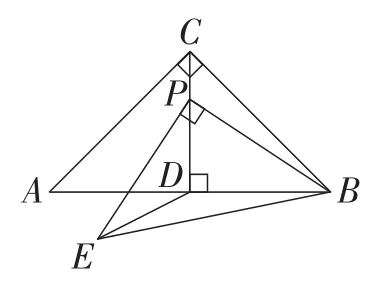
图6
分析:由已知可得△ABC∽△EPB.进而可得△BCP∽△BAE.动点P在定线段CD上运动,则点P的对应点E必在某定线段上运动,故拟定思路如下:由△BCP与△BAE始终相似确定点E所在线段,再寻找定点D到定线段的最小距离.
解:如图7,以DB为直角边在AB下方构造等腰直角三角形BDF,
当点P运动到与点C重合时,点E与点A重合;
当点P运动到与点D重合时,点E与点F重合,
所以点E在线段AF上运动.
过点D作DG⊥AF于点G,

图7
当点E运动到点G的位置时,DE有最小值.
因为AC=BC=4,
所以DB=AD=DF=
所以DG=2.
例2如图8,AB是⊙O的直径,点C在AB的延长线上,AB=BC=10,P是⊙O上一动点,连接PC,以PC为边作△PCD,使∠PDC=90°,,P,C,D三点为逆时针顺序.连接OD,则线段OD长的最小值是_____.
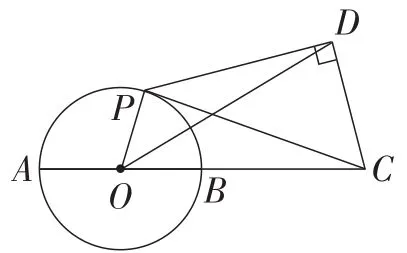
图8
分析:由已知可知,点P始终在定⊙O上运动,(即∠DCP为确定角),可以猜想到点D一定在某一定圆上运动,故找到这个定⊙I(如图9),连接OI,当点D运动到线段OI上即可找到线段OD的最小值.
解:如图9,以OC为斜边构造Rt△OCI,
因为∠DPC=∠IOC,
∠PDC=∠OIC,
所以△PDC∽△OIC.

图9
所以△DCI∽△PCO.
又因为AB=BC=10,
所以OC=15.
可求得OI=12.
所以ID=3.
因为点I是定点,ID是定长,
所以点D在半径为3的⊙I上运动.
所以OD的最小值为12-3=9.
显然,由于已经确定了动点D的运动轨迹为以定点I为圆心,半径为3的一个圆,当然亦可求线段OD的最大值和线段OD长度的取值范围,在此就不展开说明了.
三、问题拓展
在前面问题起源中,我们谈到从位似的角度来理解以上问题,而从两种位似情形来看,不难猜想到当位似中心在对应点连线上时,上述结论也是成立的.
拓展1:对于平面内一定点O和一动点P,连接OP,在线段PO的延长线上取一点Q,始终满足(k为定值).
(1)如果规定动点P在一条确定直线l上运动时(如图10),依据位似的定义可知,点Q的运动轨迹必为一条与直线l平行的直线.进而,若点P的运动轨迹为直线l上某一线段PP1时,点Q的运动轨迹必为一条平行于线段PP1的位似线段QQ1,且有QQ1=k·PP1.
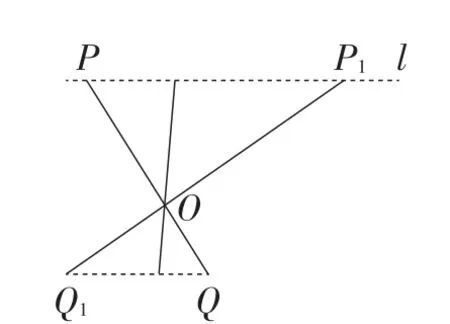
图10
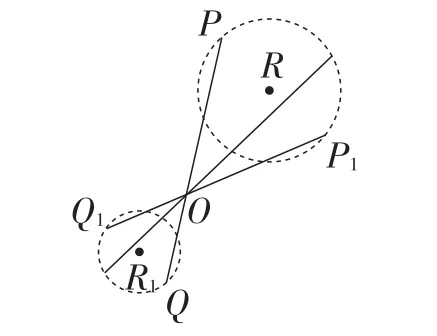
图11
(2)如果规定动点P在一确定⊙R上运动时(如图11),依据位似的定义可知,点Q的运动轨迹必为一个圆(其圆心R1与点R,O三点共线),且有
当然,动点P的运动轨迹可以定义为任意轨迹,动点Q的运动轨迹将始终保证与动点P的运动轨迹关于定点O成位似图形,由于情况多样而本质不变,故不再赘述.
拓展2:对于平面内一定点O和一动点P,连接OP,在平面内再取一点Q,连接OQ,始终满足(k为定值),且∠POQ=α(0<α<360°,且α≠180°).
(1)如果规定动点P在一条确定直线l上运动时(如图12),依据前面的论述,我们可以认为是图10中的△QOQ1整体绕点O逆时针旋转180°-α后得到的,点Q的运动轨迹必为一条与直线l相交的直线,其夹角之一为α.

图12
理由如下:在图12中,直线PP1与QQ1交于点T,由于,∠POQ=∠P1OQ1=α,
易证得△POQ∽△P1OQ1,POP1∽△QOQ1.
进而可以证得∠PP1O=∠QQ1O.
得∠T=180°-α.
(2)如果规定动点P在一确定⊙R上运动时(如图13),依据前面的论述,点Q的运动轨迹可以认为是图11中的⊙R1绕点O逆时针旋转180°-α后得到的一个圆,且有C⊙R1=k·C⊙R.
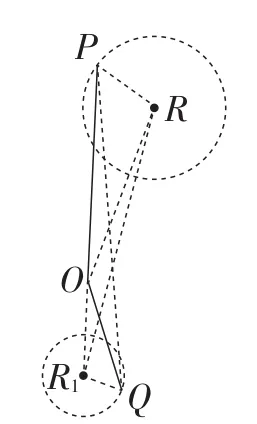
图13
理由如下:如图13,连接OR,作∠ROR1=α,并使得,易证△POQ∽ △ROR1,POR∽ △QOR1,得.故可以得到点Q在以R1为圆心,k·PR为半径的圆上运动,故C⊙R1=k·C⊙R.
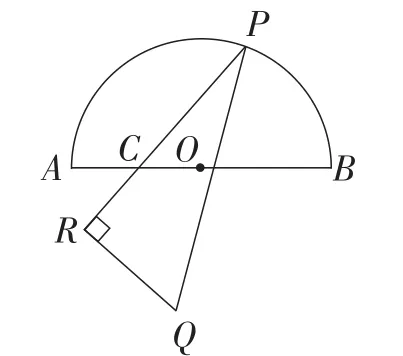
图14
例3如图14,点P为半圆O上一动点,直径AB=16,C为OA中点,过点C的线段PR始终满足PC=2CR,以PR为直角边作 Rt△PRQ,∠R=90°,PR=2RQ,则BQ的最小值为______.
分析:如图15,连接CQ,可发现RC∶RQ∶CP=2∶3∶4,可得CQ∶PC=13 ∶4,.故可以判断当动点P在半圆O上运动时,动点Q必在某一半圆上运动,进而通过确定这个圆的两个要素(圆心、半径),最终发现BQ的最小值.
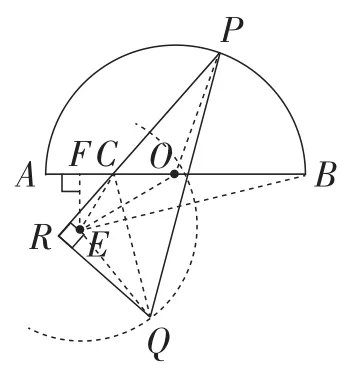
图15
解:如图15,连接CQ,
因为RC∶RQ∶CP=2∶3∶4,
所以CQ∶PC=∶4,
tan∠RCQ=.
在AB下方取点E,连接CE,
使得∠ACE=∠RCQ,CE∶OC=∶4,
易证△CPQ∽△COE,△CEQ∽△COP.
过点E作EF⊥AB于点F,连接EB,由OC=4,
可得CF=2,EF=3.
在Rt△BEF中,FB=14,EF=3,
所以BQ的最小值为E,B,Q三点共线时,其值为
通过以上举例,笔者发现利用“共顶点三角形旋转”模型来解决相关问题时,所添加的辅助线并非凭空捏造,而是有章可循的,之所以对这类构造方法感到无从下手,恰恰是忽视了问题的本源——位似图形,若能从根源上揭示问题本质,进而可以寻求到通解、通法来解决问题.