轨道交通线路异物入侵的视觉检测方法
2018-09-13王前选李鹏崔灿周伟
王前选,李鹏,崔灿,周伟
(1.五邑大学轨道交通学院,广东江门529020;2.中南大学交通运输工程学院,湖南长沙410075)
轨道交通线路异物入侵是指轨道交通设施以外且达到一定质量和体积的物体,因外力作用闯入了轨道线路,并对线路和列车运行安全造成威胁.《高速铁路自然灾害及异物侵限监测系统总体技术方案(暂行)》明确指出:对高速铁路沿线风、雨、雪、地震及上跨铁路的道路桥梁异物侵限应实现有效、准确、实时监测.轨道交通线路异物入侵具有突发性、难以预测、破坏力巨大等特征[1-2],为轨道交通行业一级防灾响应.随着列车运行提速,列车司机依靠目视发现线路中异物的几率越来越小,即使能发现异物,也无法及时采取制动措施,导致体积很小的异物也很可能引发重大事故.据报道,由异物入侵导致的重大事故在世界各国时有发生,严重影响铁路生产,造成了极坏的社会影响[3-4].如,美国2005年因异物入侵导致的重大行车事故584起,造成1292人伤亡.日本2005年城际铁路因钢轨上存在一块石头导致列车脱轨倾覆,造成107人死亡.我国2001年因行人非法入侵造成8409人死亡,2005年新长铁路因异物入侵引发事故65起.
高速行驶的列车具有极大的惯性力和动能,若与入侵线路的异物发生碰撞,必将对列车造成更大的毁灭性破坏,因此异物入侵监测系统一旦发出报警信息,列车运行控制、工务维修等指令须及时下达以排除安全隐患.国内外学者在异物入侵检测领域开展了大量的研究[5-8],研发了许多异物入侵检测技术[9-11],德国、法国、日本、中国等国家均建立了异物入侵检测系统[12-18].国内外异物入侵检测主要有接触式和非接触式两类.接触式检测技术主要包含单电网检测、双电网传感器检测、光缆传感监测技术、光纤光栅防护网技术、倾角传感器,非接触式检测技术主要包含主动红外入侵探测、激光入侵探测、雷达式微波检测、对射型微波入侵探测、超声波探测、一般视频监测等.然而这些检测技术还存在以下主要缺陷:1)对于落在轨道上的静态异物无法测量;2)存在漏报和误报,特别是误报的情形较多;3)发生误报时无法远程人工确认.本文研究开发了一种机器视觉异物入侵轨道交通线路检测技术,并研发了相应的装备用于监测轨道交通线路容易发生异物入侵的线路区段,以实现对各种异物入侵事件的准确检测和识别.
1 异物入侵视觉检测方案
1.1 检测原理
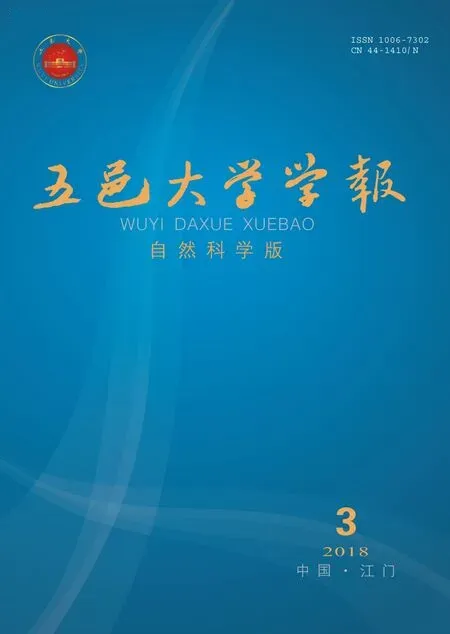
对轨道交通线路入侵异物准确检测的前提是准确识别监测区域数字图像中的钢轨.基于 Radon变换思想,首先准确识别检测出监测图像中的钢轨,并计算得出监测图像中两钢轨的直线方程.在轨道线路的同一位置连续拍摄两帧照片,一帧是线激光器关闭时的照片,一帧是线激光器打开时的照片,这两帧照片相减得到钢轨和异物在线激光照射下的投影,耦合轨枕表面没有异物时的钢轨高度信息,计算得出突变异物垂直于轨面方向的高度信息;耦合两钢轨之间的距离信息,计算得出突变异物沿轨道横向的宽度信息;线激光扫描线落在异物的最终位置减去最初位置得出异物沿轨道方向的长度信息,从而实现对异物的三维信息测量.异物检测原理如图1所示.
1.2 系统模型
根据异物入侵检测原理,需要在有异物的轨道线路位置连续拍摄两帧照片,一帧是线激光器关闭时的照片,一帧是线激光器打开时的照片.实际轨道线路异物入侵检测过程中要求昼夜不间断进行检测以确保行车安全,且使用的检测光源(线光源)和照明光源不影响行车安全,也不受环境光照变化的影响.将检测相机和照明光源微伺服控制云台(简称检测相机云台)、检测光源和控制器微伺服控制云台(简称检测光源或线光源云台)分别安装在线路同侧的两根立柱上.异物入侵检测区域为两立柱之间的轨道线路,检测相机和控制器之间保持正常通讯,且分别控制其所在的伺服云台转动,二者相互配合完成对检测区域的同步扫描,实现重复巡检.
检测相机云台和检测光源云台在转动过程中要求线光源扫描线落在线路钢轨上的位置必须在检测相机的视场范围内,且线激光器受检测相机同步信号控制在轨道同一位置进行开和灭频闪,以得到轨道同一位置线激光开和灭的连续两帧照片.在轨道同一位置,以线激光灭时的照片为背景图像,以线激光开时的照片为检测图像,二者相减得到钢轨、入侵异物在线激光下的投影;通过耦合钢轨高度信息、两钢轨之间的距离信息得出异物的高度和宽度;根据线光源扫描线在异物边缘上的位置得出异物的长度.以此实现对检测区间的异物检测并发出报警信息.异物入侵检测模型如图2所示.
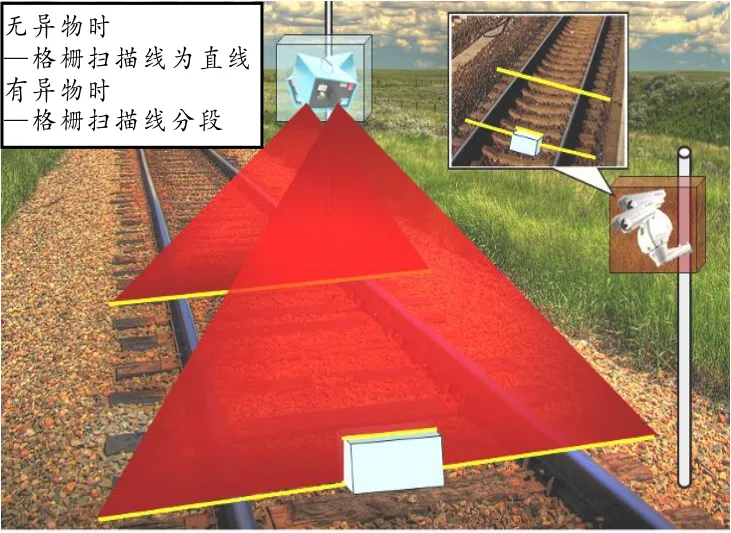
图1 系统检测原理示意图
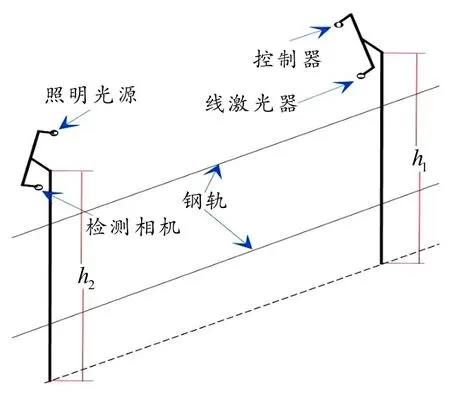
图2 异物入侵检测模型
2 异物入侵检测系统设计
2.1 系统硬件设计
可靠、良好的硬件系统是异物入侵检测系统功能实现的基础.根据不影响行车安全且全天候可靠检测的要求和系统的使用环境,构建轨道交通线路异物入侵硬件系统.如图3所示,该系统主要由光学成像子系统、光照及检测光源子系统、云台同步控制子系统、图像采集及处理子系统和安装夹具及防护子系统等构成.轨道交通异物入侵检测硬件系统结构如图4所示.

图3 异物入侵检测硬件系统构架
2.2 系统软件设计
异物入侵检测系统主要采用检测相机和检测线光源实时检测轨道交通异物入侵情况,需要将检测线路区段正常和非正常情况均显示在监控计算机屏幕上,一旦出现异物入侵线路情况,将采取报警的方式提醒相关人员及时处理解决问题.检测系统软件的主要功能是:将检测系统图像采集卡采集到的轨道线路监测图像采用恰当的计算机图像处理,从而判断有无异物入侵情况,如果有则采用相应计算方法得出异物信息,并发出报警;能对检测结果进行历史查询,即需要对这些数据进行恰当的存储.系统数据流向如图5所示.
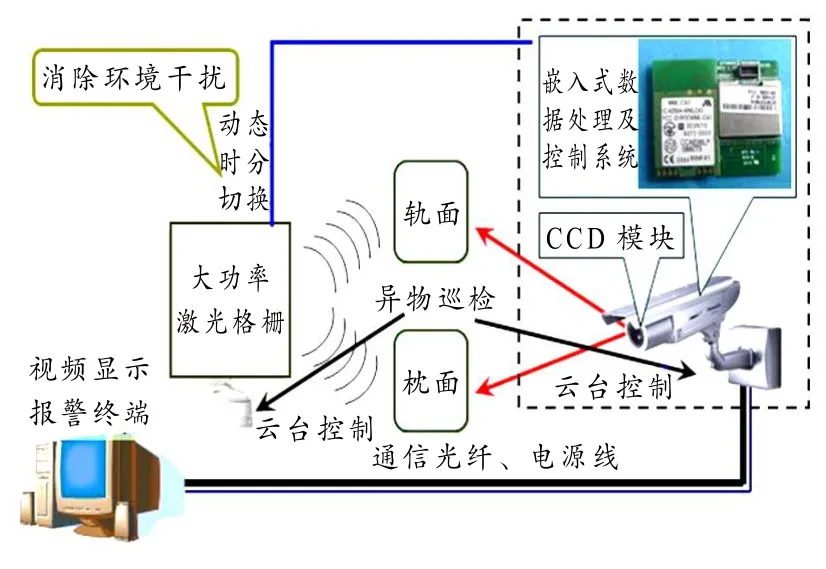
图4 异物入侵检测硬件系统结构

图5 异物入侵检测系统数据流向图
系统要求实现实时图像显示、历史数据查询、软件参数设置、系统标定及系统状态显示等功能.系统软件部分主要包括云台控制、算法实现、异物检测、实时视频展示、图片保存、历史图片查询、系统标定、参数管理、日志管理、状态监控和用户管理等11大模块,软件系统总体结构如图6所示.
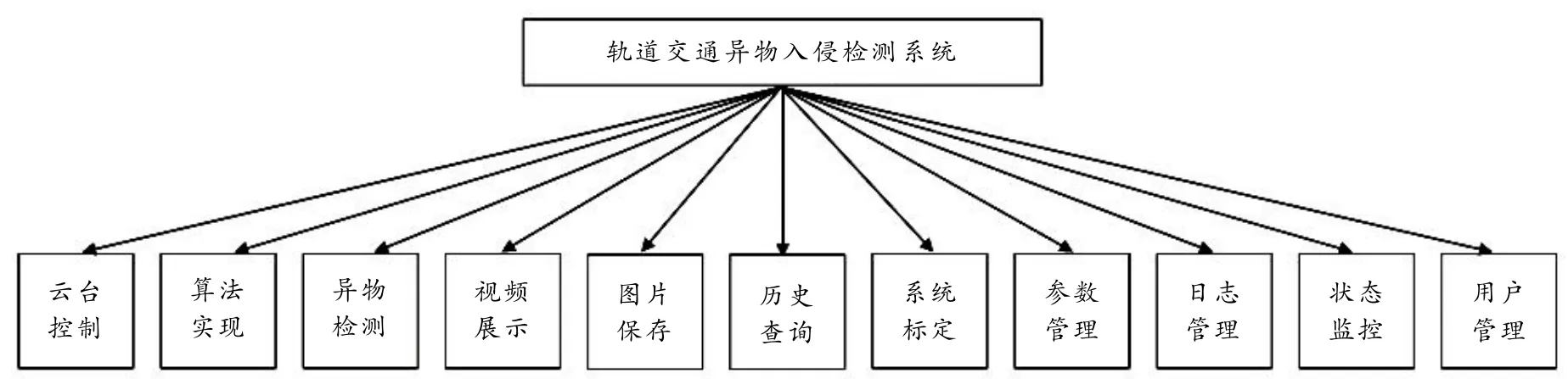
图6 异物入侵检测软件系统
2.3 异物入侵检测流程
检测系统通过检测相机和检测线光源得到检测区域监测图像,通过钢轨识别检测算法计算两条钢轨直线.系统异物检测具体流程如图7所示.
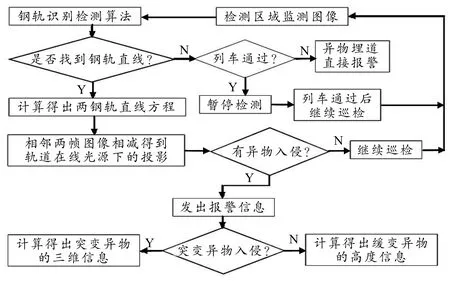
图7 异物入侵检测流程
2.4 异物入侵检测策略
针对现有异物入侵检测技术与装备的漏报和误报问题,本文提出一种全新的异物检测策略,以确保异物检测不误报和漏报.
将列车通过和异物入侵区分开来,对异物入侵情况发出报警信息.若无法识别监测区域内钢轨,首先判断是否为列车通过监测区域,若为列车通过,则暂停检测,待列车通过后继续巡检;若非列车通过,则判定为异物入侵并埋没轨道,直接发出报警信息.若识别出监测区域内钢轨,判断是否有异物入侵,若无异物入侵,则继续巡检;若有异物入侵,则发出报警信息,并计算入侵异物三维信息.
对监测区域重复巡检,确保系统不漏报、不误报.本文检测系统通过检测相机和检测光源的互相配合完成对监测区域的检测,当完成一次完整的检测后,检测相机云台和线光源云台恢复到初始位置,重复对监测区域进行检测;当第一次检测到有异物入侵监测区域线路时,系统将存储本次检测结果,并对该异物入侵的位置进行重复检测,若再次检测到有异物入侵,且异物信息与上一次的检测结果一致时,则确认发生了异物入侵,并发出报警信息.
采用视频或图像回传进行人工确认,确保检测结果正确.当检测系统确认发生异物入侵事件时,则将发生异物入侵位置的监测图像或视频回传到监控室内进行人工确认.
3 异物检测方法及试验结果
为了验证本文方法,在兰新铁路进行了异物入侵检测的现场试验.将检测相机和照明光源安装在兰新铁路红层车站西边约800 m处编号为0650的上行线接触网立柱上,线激光器和控制器安装在编号为 0652的上行线接触网立柱上,两立柱水平距离38 m.分别进行列车通过、异物入侵检测试验,在试验过程中,检测区域为两立柱中间位置20 m范围.
3.1 异物入侵检测方法
轨道交通线路异物入侵按异物类型可分为缓变异物和突变异物.缓变异物是指积雪、风吹雪、积沙、风吹沙等缓慢入侵轨道交通线路的异物.突变异物是指诸如隧道口落石、线路倒线倒杆、山体塌方埋道、非法入侵的行人和动物、道口车辆等会突然入侵轨道交通线路的异物.
首先计算得到监测图像中轨道的两钢轨直线方程,并在轨道的同一位置连续截取2帧监测图像,一帧是线光源关闭时的监测图像,另一帧是线激光器打开时的监测图像,对这2帧监测图像作帧间差分,得到钢轨和异物在线激光照射下的投影,计算得到由轨头到异物上表面的垂直距离1H、两钢轨之间距离D、线光源在两钢轨轨头的投影目标点a和点b.
为获得缓变异物的厚度,耦合轨枕表面没有异物时的钢轨高度信息,按照仿射几何原理计算得出缓变异物的厚度,如果缓变异物的厚度达到了阈值,则发出预警或报警信息.
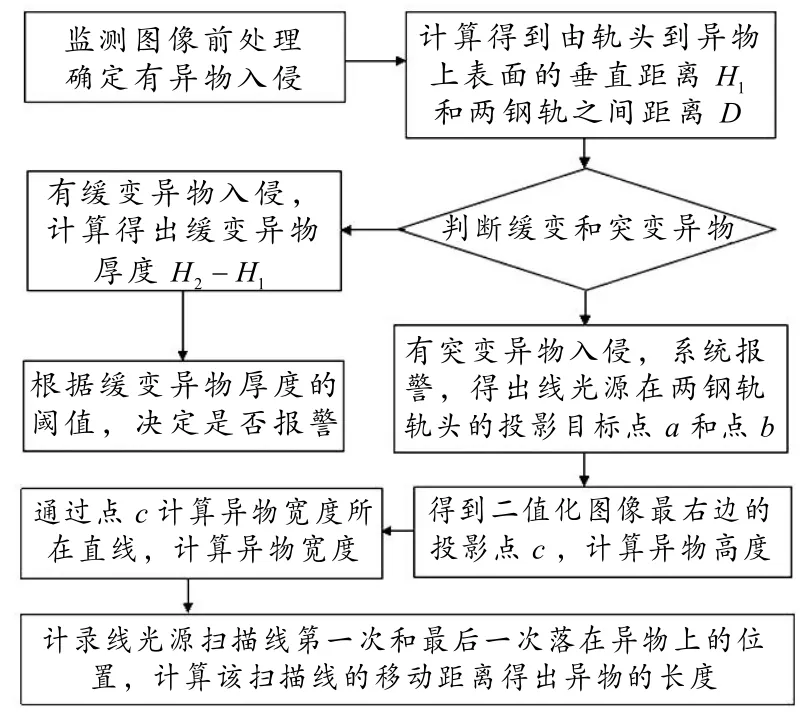
图8 异物入侵检测过程
本文所指突变异物的“长、宽、高”是指异物落在轨道区域的最不利尺寸,其定义如下:突变异物的“长度”是指沿轨道方向的尺寸;突变异物的“宽度”是指沿轨道横向的尺寸;突变异物的“高度”是指沿轨道垂直方向的尺寸.异物检测及其三维信息测量流程如图8所示.寻找二值化监测图像中直线Lab右侧最远的投影点c,记录该投影点的坐标值,计算通过该投影点且斜率与直线Lab相同的直线Lc,计算直线Lab和直线Lc的距离d3,根据仿射几何原理计算突变异物的高度和宽度;记录线光源扫描线第一次和最后一次落在异物上的位置,通过计算该扫描线的移动距离得出异物的长度.
3.2 缓变异物入侵检测
在现场试验过程中,因为没有出现积沙积雪埋道现象,故人为将棉被覆盖在钢轨和轨枕上以模拟积沙积雪埋道事件.试验结果如图9所示,缓变异物厚度检测结果见表1.
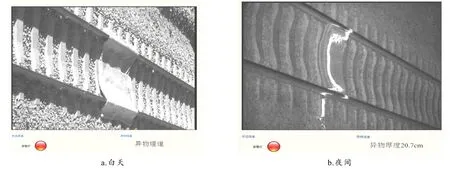
图9 缓变异物入侵线路的检测现场试验

表1 缓变异物厚度检测结果
现场试验结果表明,用本文方法可以有效检测缓变异物入侵埋道事件,并可对缓变异物的厚度进行定量测量,测量精度较高.
3.3 突变异物入侵检测
在现场试验过程中,没有发生突变异物入侵事件,为验证异物入侵检测系统可对突变入侵异物进行量化分析与报警,人为模拟形状规则的纸箱(330 mm×330 mm×330 mm )入侵轨道交通线路事件.当突变异物入侵监测区域时,异物检测系统提示监测区域发生了异物入侵事件,并发出报警信息.试验结果如图10所示,突变异物三维信息检测结果见表2.
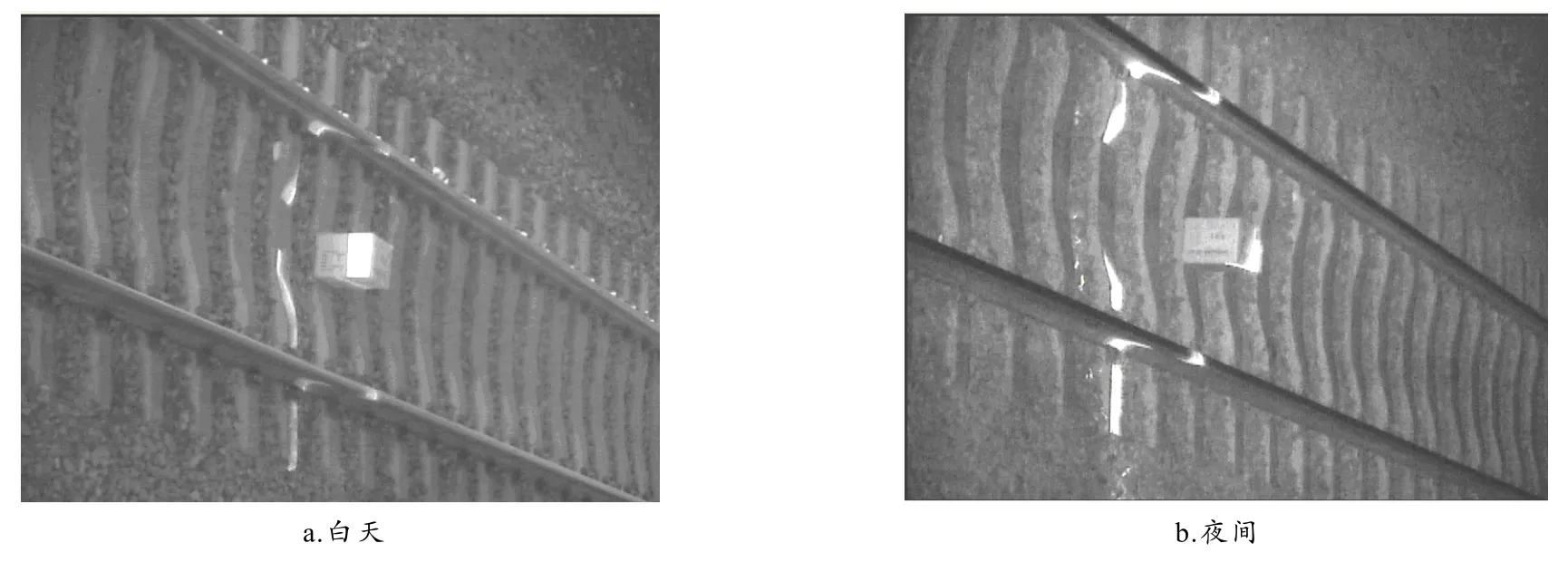
图10 纸箱入侵监测图像

表2 突变异物三维信息检测结果
现场试验结果表明,用本文方法可以有效检测突变异物事件,并可对突变异物的三维尺寸信息进行定量测量,测量精度较高.
4 结论
基于机器视觉理论和仿射几何原理的异物入侵轨道交通线路检测方法,有效解决了目前国内外已经安装和使用的异物入侵检测装备的漏报与误报问题,能有效识别列车正常通过的监测区域,准确测量缓变异物的高度信息和突变异物的三维尺寸信息,为轨道交通运营安全提供了新的技术保障.