大垄玉米原茬地免耕播种机防堵装置设计与优化试验
2018-08-31陈海涛侯守印闵诗尧柴誉铎
陈海涛 侯 磊 侯守印 李 煜 闵诗尧 柴誉铎
(东北农业大学工程学院, 哈尔滨 150030)
0 引言
保护性耕作技术可减少土壤风蚀、水蚀,提高土壤肥力,避免秸秆焚烧,缓解生态环境压力,是实现农业可持续发展的一项重要举措[1]。该技术要求将秋季收获后的秸秆还田,春季在原茬地上直接进行开沟、施肥、播种、覆土镇压等作业[2-5]。由于高产品种结合新技术的推广,玉米大垄双行种植模式应运而生,该种植模式能增加田间通风、透光性,可大大提升单位面积的玉米产量[6]。将保护性耕作技术和大垄双行种植模式相结合,可避免因垄台宽度过小而导致的机具垄上播种稳定性差的问题,进一步提高播种质量[7-8]。
免耕播种是保护性耕作技术的核心,防堵是免耕播种的关键[9]。目前,常用的防堵装置可分为主动式和被动式两类。被动式防堵装置如KARAYEL[10]设计的翼铲、双圆盘组合式防堵装置,CHEN等[11]设计的偏置式分草双圆盘,SHARIPOV等[12]通过传感器识别地表信息控制滑靴式分草开沟器动态防堵,林静等[13]设计的阿基米德螺线型缺口圆盘刀。这类防堵装置结构简单,在一定条件下有良好的防堵效果,当大量秸秆覆盖地表时,易发生堵塞现象。主动式防堵装置如MATIN等[14]设计的带状粉碎旋耕装置,张军昌等[9]设计的立轴旋转式秸秆粉碎装置,蒋金琳等[15]设计的双刀盘动力破茬装置,李复辉等[16]设计的灭茬刀、旋耕刀组合式秸秆粉碎还田装置。这类防堵装置防堵效果好,但存在土壤扰动量大、功率消耗大等问题,且由于土壤与秸秆混合,影响种子与土壤接触,降低出苗率。针对大垄玉米原茬地免耕播种作业,王庆杰等[7]采用宽窄行交替休闲种植方式,通过旋转式缺口圆盘刀切茬装置,在大垄上进行原茬错茬免耕播种作业;贾洪雷等[17]设计的组合刀片式被动切茬装置,作业时只切断秸秆不处理根茬,适用于行间互作和宽窄行交替休闲2种免耕播种作业模式。此种免耕播种作业方式土壤扰动量小,可有效减少堵塞,但错行作业难度大,开沟器行走在玉米根茬上时,易造成堵塞现象[18]。陈海涛等[19]设计的2BMFJ系列免耕精量播种机,采用残茬侧向抛出的防堵方式,适用于各种作物残茬和各种状态原茬地,防堵效果好,解决了上述主动式防堵装置存在的土壤扰动量大、功率消耗大等问题,不过该机具在北方寒地播种作业后,覆盖在播种带上的残茬阻碍阳光射入,影响地温回升速度[20-21]。
本研究旨在设计一种适合北方寒地大垄玉米原茬地的免耕播种机防堵装置,以有效解决在免耕播种作业时残茬堵塞及可能造成地温回升较慢的问题,通过理论分析和正交试验优化设计方法,探究该防堵装置的结构和作业参数优化组合。
1 结构与工作原理
1.1 防堵装置结构
由机架、传动链、挡秸板、上传动系统、下传动系统、主变速箱、清秸刀齿总成(以下简称刀齿总成)、联轴器、地轮等构成主动式防堵装置,如图1所示,将其中由挡秸板、滚筒焊合、刀鞘、清秸刀齿、带座轴承组成的针对一条大垄作业部件称为该防堵装置的清秸单元组,如图2所示。该防堵装置可与大垄精量播种单元组、施肥机构、播种施肥传动系统共同组成一种适用于北方大垄玉米原茬地的免耕播种机。

图1 防堵装置结构简图 Fig.1 Structure diagram of anti-blocking mechanism 1.机架 2.传动链 3.挡秸板 4.上传动系统 5.下传动系统 6.主变速箱 7.刀齿总成 8.联轴器 9.地轮

图2 清秸单元组结构简图 Fig.2 Structure diagram of cleaning unit-combination 1.挡秸板 2.滚筒焊合 3.刀鞘 4.清秸刀齿 5.带座轴承
1.2 工作原理
该装置采用三点悬挂与拖拉机挂接,机组作业时由拖拉机提供牵引力和旋转动力。主变速箱输出的动力通过传动链、上传动系统、下传动系统、联轴器传递给4个刀齿总成,驱动刀齿总成旋转,其上固装的清秸刀齿对播种带内的玉米残茬进行循环打击,使玉米残茬沿清秸刀齿出土点绝对运动轨迹的切线方向运动,在接触到该刀齿总成对应的挡秸板后落在两相邻大垄之间的垄沟内,进而在大垄上形成与大垄精量播种单元组对应的双行播种带,以保证播种机作业时开沟器、覆土镇压器的顺利通过。在机架两侧装配地轮,通过调节其高度来控制清秸刀齿的入土作业深度,并由其实现整个防堵装置随地表进行自动仿形作业。播种作业时地轮行走在大垄垄沟内,大垄精量播种单元组行走在大垄清洁播种带上,机具垄上播种稳定性高。播种作业后残茬覆盖在垄沟内,实现蓄水保墒、培肥地力等功效,避免了因残茬阻碍阳光射入导致的播种带上地温回升较慢现象。
2 防堵装置关键部件设计
为了保证清秸质量,清秸刀齿入土深度要大于玉米根茬主根深度[22-23],针对北方玉米根茬特性,设定清秸刀齿入土深度h为55 mm。查阅资料,可知刀齿总成上清秸刀齿数在9~16范围内[19,24],考虑到该防堵装置的结构限制,设定刀齿总成上刀齿排数e为2,单排刀齿包含清秸刀齿数z为5,刀齿总成上清秸刀齿的排列方式如图3所示,10个清秸刀齿间轴向间角均为36°。

图3 刀齿总成结构简图 Fig.3 Structure diagram of blade assembly
2.1 切土间距的确定
两相邻土壤切痕之间的法向距离即为切土间距d,切土间距d是影响免耕播种机防堵效果的重要指标。为减小刀齿总成在作业过程中的冲击载荷,需要各理论切土间距相等。
刀齿总成上每相邻两清秸刀齿切茬时间间隔内,机具进距为
(1)
式中v0——机组作业速度,km/h
n——刀齿总成转速,r/min
单排刀齿上相邻两清秸刀齿切茬时间间隔内,机具进距为
(2)
欲使各理论切土间距相等,需满足条件
L-J1=rJ2±J1(r=1,2,3,…)
(3)
式中L——相邻两排刀齿间的距离,mm
r——排距系数

图4 清秸刀齿尖点速度分析简图 Fig.4 Diagram of velocity analysis of cleaning blade
对清秸单体回转作业速度特性分析可知,当清秸刀齿回转作业运动至最低点时,清秸刀齿尖点绝对速度va方向和土壤切痕方向吻合。如图4所示,对此时清秸刀齿尖点运动速度进行分析,得到其沿x轴方向及y轴方向的速度分量为
(4)
式中vx——清秸刀齿尖点绝对速度沿x轴方向分量,km/h
vy——清秸刀齿尖点绝对速度沿y轴方向分量,km/h
vr——清秸刀齿尖点相对速度,km/h
γ——清秸刀齿尖点绝对速度方向与机具前进方向反向夹角,(°)
α——清秸刀齿尖点相对速度方向与机具前进方向反向夹角,(°)
R——刀齿总成回转半径,mm
γ和土壤切痕与机具前进方向夹角β大小相等。因此,β为
(5)
切土间距d过大会导致玉米根茬从两相邻切痕之间漏过。为了保证清秸质量,要求切土间距d要小于玉米根部茎秆直径[25]。田间实测玉米根部茎秆直径并做统计分析,得出其服从正态分布N(34.1,6.350 4),根据“3σ”法则,最小直径为26.54 mm。如图5a所示,切土间距d满足
d=J1sinβ<26.54 mm
(6)

图5 工作原理图 Fig.5 Functional diagrams
2.2 播种单元组通过性分析与相关参数设计
针对大垄精量播种单元组,可通过更换双行大豆排种器和单行玉米排种器来实现在大垄玉米原茬地上进行大豆垄上四行、玉米垄上双行免耕播种作业。双行大豆排种器比单行玉米排种器所需要的播种带宽度大,因此对装配双行大豆排种器的大垄精量播种单元组进行通过性分析。如图5所示,为保证开沟器、覆土盘、镇压器的顺利通过[26],要求沿机具前进方向的清洁带宽S大于等于170 mm。
单排清秸刀齿沿机具前进方向的清洁带宽为
(7)
沿机具前进方向刀齿总成的清洁带宽为
S=Lcosθ+S1≥170 mm
(8)
清秸刀齿尖点相对速度方向与机具前进方向反向夹角α和刀齿总成回转轴垂直面与机具前进方向的夹角(以下简称夹角)θ大小相等。因机具的作业原理和结构限制,确定夹角θ的变化范围为20°~30°,确定机组作业速度(以下简称作业速度)v0的变化范围为3.6~7.2 km/h。
联立式(1)~(8),得到防堵装置的部分结构和作业参数

(9)
因此,初步设定相邻两排刀齿间距L为50 mm,刀齿总成回转半径R为330 mm。
由上分析可知,作业速度v0、刀齿总成转速n、夹角θ等因素都对防堵装置的作业效果有重要影响。因此,满足农艺和机具设计要求前提下,应找到防堵装置的最佳结构和作业参数组合。
3 参数优化试验
3.1 试验条件
试验于2017年10月22日在哈尔滨向阳农场进行,试验地块为机收后玉米原茬地,如图6所示。土壤硬度26.3 kg/cm2,土壤湿度30.1%,玉米秸秆覆盖量1.253 kg/m2,清秸刀齿入土深度55 mm。

图6 田间试验 Fig.6 Field test
3.2 试验仪器及设备
约翰迪尔354型拖拉机、JM5937A动态信号测试系统、JNNT-0型应变式扭矩传感器、SFZ001型应变式拉力传感器、SZ-3型土壤硬度计、SU-LB型土壤水分测定仪、艾德堡数字电子数显推拉力计、乐祺C100001型电子秤、数码摄像机、卷尺等。JNNT-0型应变式扭矩传感器由法兰盘与主变速箱动力输入轴串联连接,测试4个刀齿总成的扭矩和;SFZ001型应变式拉力传感器嵌入其保护架中,通过螺栓分别与该防堵装置的3个悬挂点连接,工作方向与机组作业方向相同[19]。试验过程中,各传感器将采集到的数据传输到JM5937A型数据采集仪,并汇总至计算机中进行数据处理和分析。
3.3 试验方法
应用Design-Expert 6.0.10,采用三因素三水平正交试验方法。以作业速度、刀齿总成转速、夹角为试验因素,以根茬清除率、秸秆清除率、防堵装置当量功耗(以下简称当量功耗)为评价指标,共实施9组试验。
因素水平的确定方法参照文献[16]并结合式(5)、(9),试验因素水平如表1所示,试验方案如表2所示(A、B、C分别为作业速度、刀齿总成转速、夹角的水平值)。
各试验指标测试方法如下:

表1 试验因素水平 Tab.1 Factors levels in experiments

表2 试验方案与结果 Tab.2 Experiment layout and results
(1)根茬清除率
试验前,选取10个测试框测量根茬数量,取算术平均值为根茬残留量O1。试验后,在有效清扫区域内选取10个测试框测量根茬数量,取算术平均值为根茬剩余量O2,根茬清除率Y1[27]为
(10)
(2)秸秆清除率
试验前,选取10个测试框测量秸秆量,取算术平均值为秸秆残留量D1。试验后,在有效清扫区域内选取10个测试框测量秸秆量,取算术平均值为秸秆剩余量D2,秸秆清除率Y2[27]为
(11)
(3)当量功耗
田间测试中,通过应变式扭矩传感器、应变式拉力传感器分别测量该装置所需的牵引力、扭矩,当量功耗Y3为
(12)
式中M——应变式扭矩传感器所测扭矩,N·m
F0——3个应变式拉力传感器所测牵引力之和,N
3.4 试验结果与分析
试验结果如表2所示,方差、极差分析如表3、4所示。

表3 方差分析 Tab.3 Variance analysis
注:P<0.01(极显著),0.01
如表3、4所示,对根茬清除率的各因素水平进行分析,得出作业速度影响极显著(P<0.01),刀齿总成转速和夹角两因素影响显著(0.01

表4 极差分析 Tab.4 Range analysis
3.5 模糊综合评价分析
由于作业速度、刀齿总成转速、夹角对根茬清除率、秸秆清除率、当量功耗产生影响的主次顺序不同,分别针对3项评价指标进行分析得出较优水平组合也各不相同,采用模糊综合评价方法对试验结果进行分析处理[28-30],得出试验范围内的最优水平组合。
该防堵装置是大垄玉米原茬地免耕播种机的关键部件,为提高工作效率,在模糊综合评价分析时,设置作业速度A为评价指标。因此,以根茬清除率Y1、秸秆清除率Y2、作业速度A、当量功耗Y3为评价指标集,正交试验的9组试验数据为评价对象集,其中Y1、Y2、A为偏大型指标,Y3为偏小型指标,评价指标集中4项指标的隶属度r1n、r2n、r3n、r4n分别为
(13)
(14)
(15)
(16)
隶属函数R为
(17)
该防堵装置的主要任务是将播种带上的残茬清理干净,要在保证根茬清除率、秸秆清除率的基础上,提高作业速度,降低功耗。因此,本试验确定根茬清除率、秸秆清除率、作业速度、当量功耗的权重分别为0.4、0.3、0.2、0.1,即权重分配集P=(0.4,0.3,0.2,0.1)。模糊综合评价值T为[31-33]
T=PR=[t1t2…t9]
(18)
指标隶属度和模糊综合评价值如表5所示。
对模糊综合评价值分别进行方差、极差分析,分析结果如表6、7所示。由分析结果可知,作业速度、刀齿总成转速、夹角影响极显著(P<0.01),主次顺序为:刀齿总成转速、夹角、作业速度,该大垄玉米原茬地免耕播种机防堵装置最优参数组合为A2B3C1,即作业速度5.4 km/h、刀齿总成转速440 r/min、夹角20°。
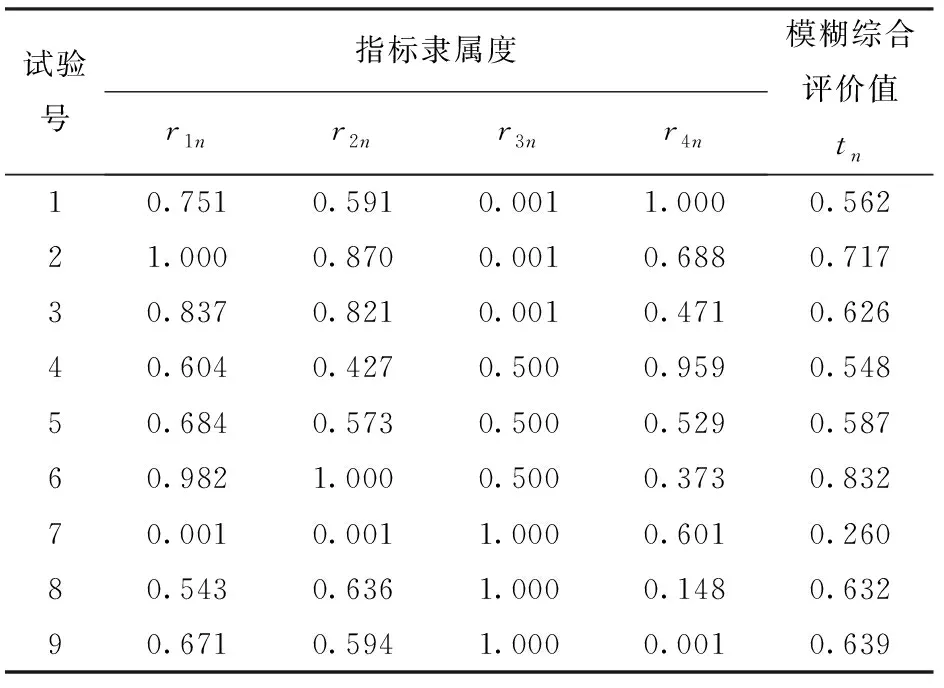
表5 模糊综合评价结果 Tab.5 Results of fuzzy comprehensive evaluation
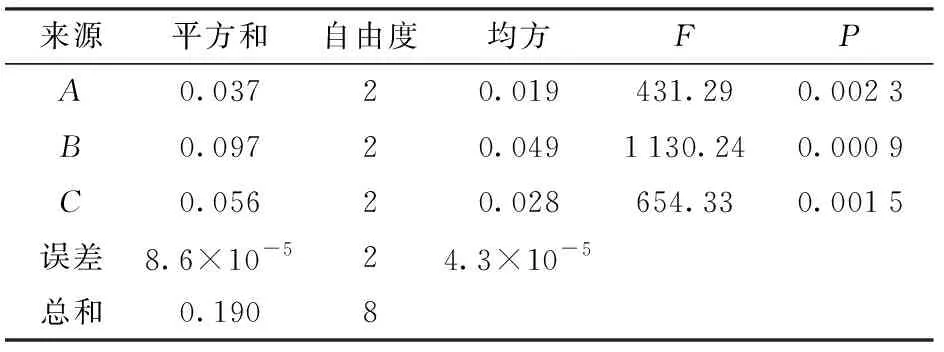
表6 模糊综合评价法方差分析 Tab.6 Variance analysis of fuzzy comprehensive evaluation

表7 模糊综合评价法极差分析 Tab.7 Range analysis of fuzzy comprehensive evaluation
3.6 优化结果验证
按照模糊综合评价分析得出的最优参数组合进行田间验证试验,试验重复5次取均值,结果为根茬清除率为93.94%,秸秆清除率为95.39%,当量功耗为4.36 kW,3项评价指标与优化结果相吻合,优化结果可信。
4 田间性能试验
4.1 试验条件
将该防堵装置与大垄精量播种单元组配合在哈尔滨向阳农场进行性能试验,试验地块为机收后玉米原茬地,土壤硬度25.1 kg/cm2,土壤湿度33.6%,玉米秸秆覆盖量1.571 kg/m2,清秸刀齿入土深度55 mm,作业速度5.4 km/h、刀齿总成转速440 r/min、夹角20°。
4.2 试验方法
(1)机组通过性
机组通过性按照NY/T 1768—2009《免耕播种机 质量评价技术规范》进行测定。
(2)土壤扰动量
免耕播种作业时减少动土量,能够蓄水保墒,减少拖拉机动力消耗,因此保护性耕作要求减少土壤扰动。土壤扰动量计算式[34]为
(19)
式中η——土壤扰动量,%
S2——实际清洁带宽,mm
W1——大垄垄上相邻两行行距,mm
W2——垄沟两侧相邻两行行距,mm
根据北方大垄双行作业模式的特点,取W1为400 mm,W2为700 mm。
(3)秸秆覆盖率
秸秆覆盖率按照GB/T 20865—2007《免耕施肥播种机》进行测定。
4.3 试验结果与分析
机组通过性、土壤扰动量及秸秆覆盖率测定结果如表8所示。
由表8可知,机组通过性良好,没有发生堵塞现象。土壤扰动量为31.9%,满足保护性耕作相关技术要求[35]。作业后,播种带内的秸秆覆盖率为13.4%,较作业前降低了83.54%,有利于提高免耕播种作业质量,且避免了因阻碍阳光射入导致的播种带上地温回升较慢现象;非播种带内秸秆覆盖率高达96.6%,较作业前升高了9.52%,可实现蓄水保墒、培肥地力等功效。
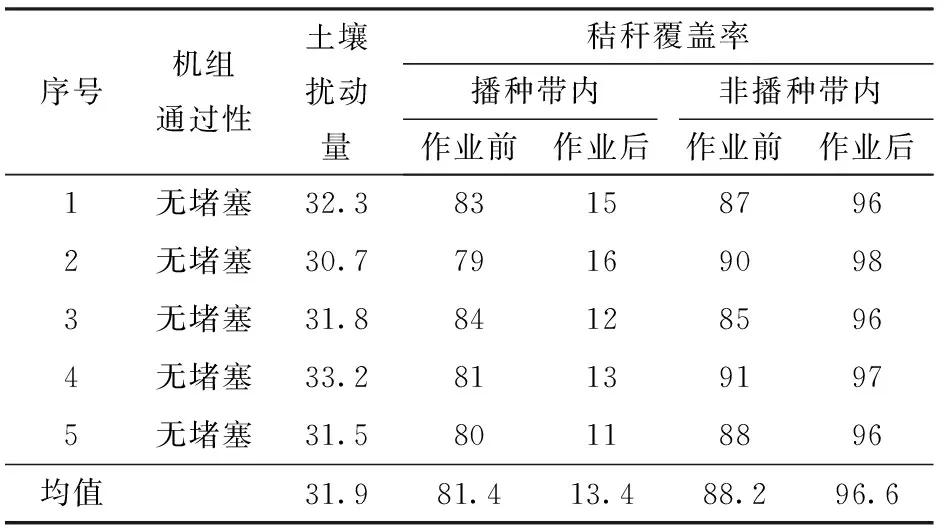
表8 田间性能试验结果 Tab.8 Results of field performance test %
5 结论
(1)在土壤硬度26.3 kg/cm2、土壤湿度30.1%、秸秆覆盖量1.253 kg/m2的机收后大垄玉米原茬地上,清秸刀齿入土深度55 mm,大垄玉米原茬地免耕播种机防堵装置的最佳结构与作业参数组合为:作业速度5.4 km/h、刀齿总成转速440 r/min、夹角20°。在此条件下,根茬清除率为93.94%,秸秆清除率为95.39%,当量功耗为4.36 kW,土壤扰动量为31.9%。
(2)所设计的110 cm大垄玉米原茬地免耕播种机主动式防堵装置可有效清洁种床残茬至垄沟,从而解决北方寒区玉米机收大垄原茬地在免耕播种作业时残茬堵塞和播种带上地温回升较慢的问题。