光电经纬仪跟踪飞机3D姿态方法研究
2018-08-29朱江山吴志勇刘宁博
朱江山 吴志勇 刘宁博
(92853部队 葫芦岛 125106)
1 引言
在靶场武器试验、航空、航天等军事及科研领域中,由于光电经纬仪能够实时、动态跟踪飞行目标并记录下跟踪每一时刻目标运动的连续序列图像,且不受地面杂波干扰等的影响,给事后目标飞行状态的分析研究提供了极大的方便,因此得到了十分广泛的应用。而目标空中飞行的三维姿态(俯仰角、偏航角、滚动角)是反映目标飞行状态的重要参数,其精确测量对试验分析、事故鉴定、训练评估、飞控系统检验及新型号的设计定型等有重要的应用价值。但在目前光电跟踪设备的靶场应用中,常将空间运动目标以某种方法等效为一个质点,测量该质点相对于视场的偏移量,即脱靶量,加上仪器的指向,得到目标在当前观测坐标系的俯仰角和方位角,据此解算出目标的运动信息。将目标看作质点测量,仅能反映其运动轨迹及速度,得不到目标的三维姿态参数,目标的航迹也是采用二维平面的方式描述,不符合人眼的视觉习惯、直观性差,而且还不能给出跟踪目标三维姿态信息和三维运动参数随跟踪时间的变化情况。进行光电经纬仪跟踪飞机的3D姿态方法研究,主要是利用计算机技术,处理光电经纬仪等光电设备采集到的跟踪数据,得到飞机的运动轨迹、运动参数及3D姿态,然后在计算机内进行虚拟仿真,关联各跟踪时间节点飞机的运动信息和3D姿态信息,驱动事先建好的飞机3D模型,提供给地面跟踪测试人员目标直观、逼真可视化的多方位信息。这不仅可为飞行监管、日常飞行训练评估、新型号飞行测试等民用、军用领域提供一种有效的手段,而且有助于开拓光电经纬仪等光电跟踪设备的数据处理方式,满足现代航空和航天测控技术发展的需要。因此,对其进行研究是非常必要的,有着重要的理论和现实意义。
2 飞机3D姿态的双站交会测量
2.1 引言
3D姿态(俯仰角、偏航角、滚动角)是反映飞机在空中飞行状态的重要参数,对其精确测量有着重要的实际应用价值。基于内置传感器和无线电的基础上已有许多关于3D姿态测量的研究,但由于光测设备(如光电经纬仪等)具有实时、动态跟踪、记录目标序列图像、不受“黑障”和地面杂波干扰等优势,精度又比无线电测量设备高一个数量级,因此在靶场测量中广泛应用光电经纬仪对飞机进行跟踪拍摄,获取飞机运动的实时连续序列图像,通过对图像处理来获得其在飞行过程中的3D姿态变化。利用靶场光测图像来测量飞机3D姿态常用的方法有图像匹配法、中轴线法和标识法等。图像匹配法需要建立各种型号飞机的表面模型和光电经纬仪的模拟系统,用模拟系统模拟出真实模型在不同条件下的飞机影像去比对真实影像,需进行迭代计算,通用性差;中轴线法避免了匹配问题,但只能求得俯仰角、偏航角信息,在导弹、火箭等圆柱形目标的靶场测试中常用,测量滚动角时需要在目标外部的适当位置涂上螺旋线,通过辨识螺旋线的成像情况来确定滚动角;标识法是在机身涂上特殊标记或在测量过程中用激光光斑做标记,通过分辨图像中标记的状态来确定飞机的姿态,在机身上涂标记一般只适合近距情况(如起飞阶段或风洞试验等),而用激光斑标记则需在飞行器外表面加装大功率的激光器,并需在地面设置接收激光斑的大屏幕,不适合跟踪测量远距离高速运动的飞行目标。
为此,在总结现有3D姿态测量方法的基础上,提出一种利用飞机自身固有特性来测量其3D姿态的新方法—角平分线方向向量法。基于2台(也可以是2台以上)经纬仪中、远距离交会测量的图像序列,首先对每一测量跟踪时刻获得的图像进行预处理,再进行边缘检测和特征线提取,获得飞机俩机翼的边缘特征线,然后在经纬仪测量坐标系下确定每条特征线上适当两点的坐标,联合经纬仪参数及跟踪的俯仰、方位角,将其转换到统一的特定坐标系下,通过面面交会解算出机翼边缘特征线在特定坐标系下的方向向量,最后利用飞机结构的对称性,在机翼特征线平面求解其两条角平分线的方向向量,此即为飞机中轴线及其同面垂线的方向向量,据此求即可得符合实际情况的飞机3D姿态(俯仰角、偏航角、滚动角)。
2.2 3D姿态测量方法概述
目前确定空间运动目标三维姿态的方法主要有两种:一种是目标本身带有GPS接收机和惯性测量装置(IMU),对自身三维姿态进行测量,称之为目标三维姿态的内测;另一种是用光电经纬仪、弹道相机、高速摄像机、雷达等光电设备对运动目标进行高速跟踪,记录下目标以跟踪时间为序的图像序列,尔后依据光电设备的位置、俯仰方位角度及图像资料,计算出目标在每一时刻的三维姿态,称之为目标三维姿态的外测,外测法根据测站的情况又分为交会测量法和单站近距离位置姿态测量法两种方法。
交会测量法主要有:共线方程交汇法、投影矩阵交汇法、空间解析曲线三维测量法及目标中轴线法等。
单站近距离位置姿态测量方法主要有:直线线性变换法、透视投影法、目标圆环椭圆度法或长宽比法、螺旋线法等。
2.3 飞机3D姿态测量的角平分线方向向量法基本依据
2.3.1 飞机3D姿态的定义
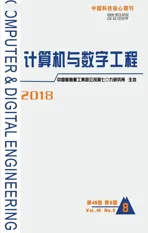
飞机在运动过程中,围绕其质心转动就产生了3D姿态的变化。飞机的3D姿态在其自身坐标系内定义最为直观,如图1所示,按右手定则建立飞机自身的目标坐标系为:OT点为飞机的质心;XT轴为飞机的纵轴,朝向机头为正;YT轴为飞机的立轴,与通过质心的铅垂线重合,指向地球外侧为正;ZT轴为飞机的横轴,由质心指向右侧机翼方向为正。XT、YT、ZT三轴与飞机质心OT一起构成符合右手定则的目标坐标系OTXTYTZT。
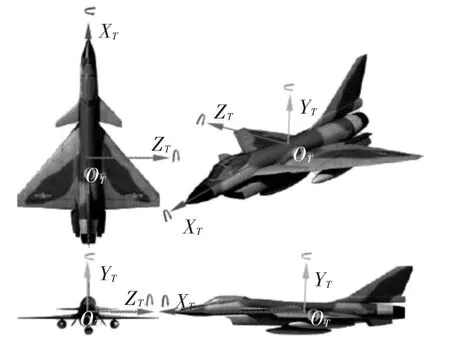
图1 飞机目标坐标系的定义
2.3.2 角平分线方向向量法测量飞机3D姿态的依据
飞机的掠翼设计形式,为本文提出的角平分线方向向量法测量其三维姿态提供了依据,如图2所示,飞机的AB、CD机翼边缘特征线位于同一平面且以飞机中轴平面左右对称,它们的延长线虚交于点E。
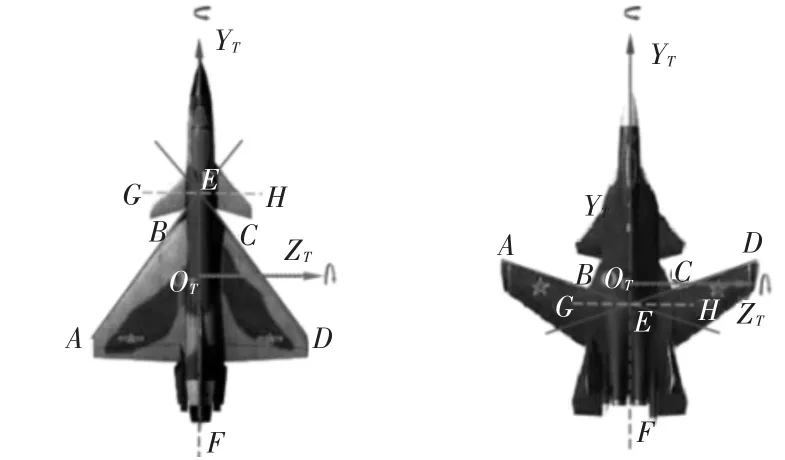
图2 飞机机翼的角平分线
通过该点可在AB、CD、两线确定的平面内构建其两条角平分线EF、GH,由于EF位于飞机的中轴平面,且与飞机的中轴线平行,因此其方向向量与中轴线一致。同时根据相交直线角平分线性质可知EF、GH互相垂直,只要获得它们在测量坐标系中的方向向量,就可以解算出飞机的姿态角信息:EF的方向向量反映了飞机俯仰角、偏航角的变化,而GH的方向向量反映了飞机偏航角、滚动角的变化。这样就将飞机3D姿态求解问题转化为两条直线方向向量的求解问题。
2.4 飞机3D姿态测量的角平分线方向向量法
2.4.1 机翼边缘特征线方向向量的交会测量
从前角平分线方向向量法的基本原理可知,飞机3D姿态测量的关键是要获取其俩翼的边缘特征线,通过特征线来求解相应的角平分线方向向量,再反映出飞机的姿态变化。因此,需要首先通过光电经纬仪的跟踪测量来获得飞机机翼边缘特征线。如图3所示,两台光电经纬仪布置在飞机航线的两侧,在时间同步器的控制下进行交会跟踪,记录下跟踪的图像对,利用空间交会的方法来还原出
飞机机翼边缘特征线的空间位置。设OXYZ为某一特定坐标系(可以是世界坐标系、大地坐标系或发射坐标系等),Oh1Xh1Yh1Zh1、Oh2Xh2Yh2Zh2分别为以经纬仪1、2光心Oh1、Oh2为原点建立的相应测量坐标系,三个坐标系取向与机身坐标一致且符合右手定则。AB为飞机机翼的一条边缘线,A11B11、A12B12分别为其在两台经纬仪成像平面所成的像,则光心Oh1与A11B11构成的平面π11同光心Oh2与A12B12构成的平面π12相交,可以唯一确定机翼边缘线AB的空间位置。设在特定坐标系OXYZ中,平面π11的方程为

平面π21的方程为

则机翼边缘线AB的空间位置可以用下面的方程组表示:

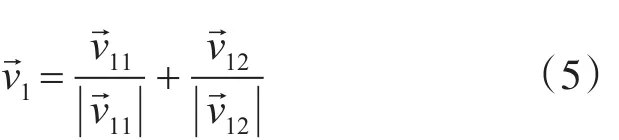
上述方程组即为相应机翼边缘线AB在空间的直线方程,且其方向向量的三个分量分别为
即飞机机翼的一条→特征线AB在特定坐标系OXYZ下的方向向量为v11=(ℓ11。m11。n11)。采用同样的方法,可以得到同一交会时刻机翼边缘线CD在→特定坐标系OXYZ下的方向向量v12=(ℓ12。m12。n12)。
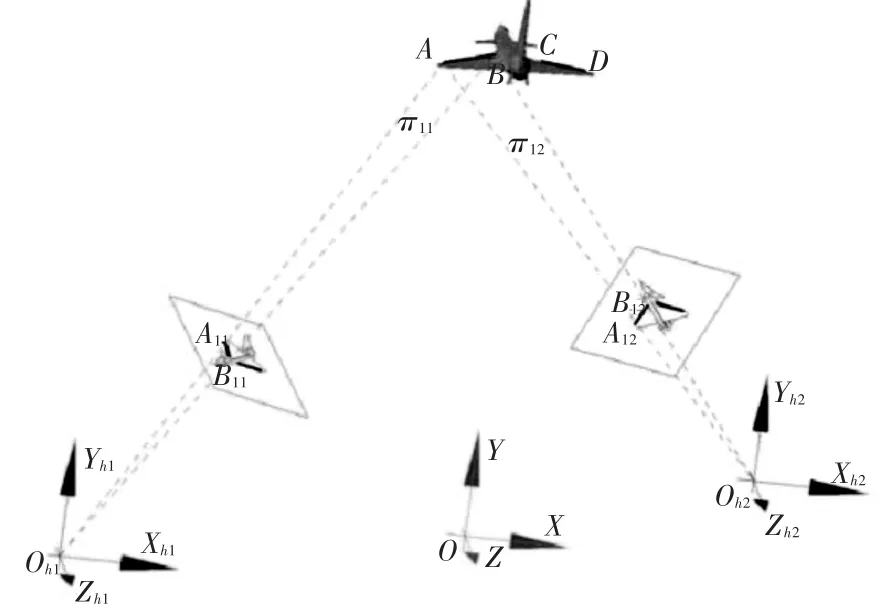
图3 飞机机翼特征线的交汇测量
2.4.2 角平分线方向向量的求解
结合线性代数和空间解析几何知识从图4中可看出:飞机机翼边缘线AB及其延长线与另一机翼边缘线CD形成两个互补的夹角,两线不垂直时,一个为锐角一个为钝角。对掠翼飞机而言,机翼边缘线AB、CD是不垂直的,所成夹角α、β中若α为锐角,则β为钝角。EF为α的角平分线,其方向向量为,EH为β的角平分线,其方向向量为且有α+β等于180°,EF线垂直 EH线。通过计算、两矢量内积:
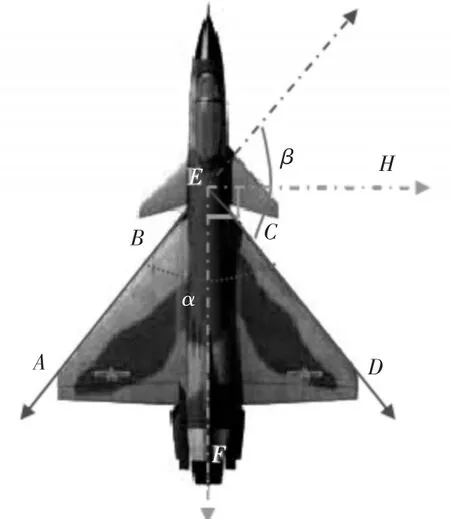
图4 角平分线原理
所成钝角平分线方向向量为

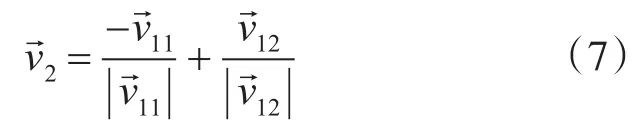
所成钝角平分线方向向量为

至此,只利用机翼边缘特征线的方向向量就重构了其角平分线的方向向量,因此即使存在误差导致AB、CD两特征线不同面,仍可求得其夹角的平分线方向向量。
2.4.3 由角平分线方向向量求解飞机3D姿态
如图5所示,飞机在特定坐标系OXYZ下的3D姿态可由其两条机翼边缘特征线的角平分线确定:飞机在特定坐标系OXYZ下的俯仰角θ为EF线与XZ平面的夹角(即EF与其在XZ面的投影E′F′的夹角);飞机在特定坐标系OXYZ下的偏航角ψ为EF线在XZ平面的投影E′F′与X轴的夹角;飞机在特定坐标系OXYZ下的滚动角γ为EH线与XZ平面的夹角(即EH与其在XZ面的投影 E′H′的夹角)。若假设EF线方向向量的三个分量分别为(ℓ,m,n),EH 线方向向量的三个分量分别为111(ℓ2,m2,n2),则有
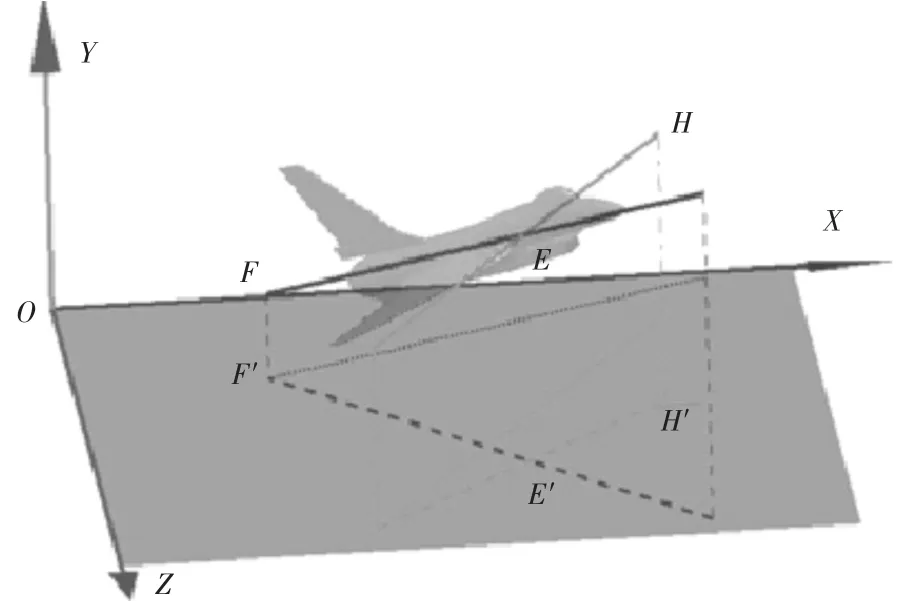
图5 机翼角平分线与3D姿态
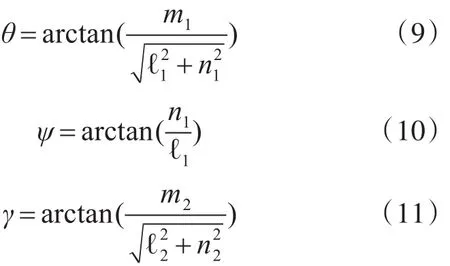
根据式(9)、(10)、(11),只要将任一跟踪测量时刻重构的机翼边缘特征线的角平分线方向向量代入,就可以得到飞机在该时刻的3D姿态。
3 结语
靶场应用光电均为应对目标飞机的跟踪测量,实际上就是已知二维平面信息和投影条件,来采取飞机三维空间信息的问题。在飞机的跟踪测量图像中,实际上记录了其运动过程的事件和姿态变化情况,如飞机的空间位置、运动轨迹、运动速度、运动加速度参数和俯仰、偏航、滚动3D姿态变化等。但传统光电图像处理方法中将飞机看作一个质点,舍弃了图像中蕴含的飞机外形形状和姿态变化等信息,因而得不到相应的3D姿态信息。本文的研究就是如何利用所获得的光电经纬仪跟踪数据,去充分挖掘跟踪图像中的隐含信息:既得到飞机的各项运动参数,又得到飞机的3D姿态信息,并可在事后还原飞机当时的运动情形,以便对飞机的飞行性能进行分析、判断、评估和验证,或者在试验分析、事故鉴定、训练评估、飞控系统检验及新型号的设计定型等方面发挥相应的应用。