面向任务的陆军装备保障系统概念建模研究
2018-08-29柏彦奇
李 晨 柏彦奇
(军械工程学院装备指挥与管理系 石家庄 050003)
1 引言
概念模型是对真实世界的抽象,概念建模是研究复杂军事系统问题的有效技术手段,是军事系统建设中联结军事人员和技术人员的桥梁,军事人员可以根据概念模型更有针对性地提出需求和问题,而技术人员则可以根据概念模型来进行后续的程序开发、计算机仿真等活动[1]。
当前有关概念模型的建模语言和方法较多:ER主要用于构建系统静态的结构模型[2],但不能够很好地描述系统的动态特征;IDEF系列和Petri网则着重于系统的动态行为[3],对系统的结构及组织关系描述不够直观、形象;UML是面向对象的建模通用语言,用序列图、活动图等一系列视图形来描述系统行为[4]。SysML是在UML基础上扩充的特定领域概念模型,此类方法虽注重描述系统的活动特征,但对于系统要素本身的状态属性变化则没有详尽的描述[5]。作者认为,这些方法关注的重点均在于方法本身,即方法能够描述什么,技术人员需要通过怎样的技术途径去实现,对于军事人员关于系统本身提出的任务性需求无法很好的体现,建立的概念模型会出现描述不统一、要素不全、合理性欠缺等问题。
因此,本文以新型陆军的装备保障系统为研究对象,运用系统六元抽象理论,从系统的环境、功能、组元、结构、状态、运行六个方面出发,借鉴美军DODAF的“模型-视角-视图”的建模思想[6~8],以信息化条件下的城市联合防空作战为例,确定了一套面向任务的,具有必要性和充分性的装备保障概念模型建模框架。
2 系统六元抽象理论
系统六元理论认为解决任何系统问题的基本思维范式首先是对系统的环境、功能、组元、结构、状态和运行六个方面进行全面、完整的描述和分析,进而才能明确系统建设的方向和目标。六元抽象理论把系统的六要素抽象为面向系统实体的任务空间(Environment)、实体功能(Function)、任务实体(Component)、实体关系(Relation)、实体状态(Status)和实体行动(Operation)六类概念模型(如图1所示)。六元概念模型是对系统六元要素的映射,是对实际复杂系统问题全面描述的集合[9~10]。

图1 军事系统抽象到概念模型
1)任务空间:任务空间是指系统实体及其环境运动变化的最大时间域和最大广义的空间域。所谓广义的空间域,是既包含狭义的实体空间位置的范围参数,也包含实体其它状态的范围参数。确定这些参数通常是研究系统问题的前提,即弄清系统研究的对象是什么,在什么样的范围内运行。
2)实体功能:实体功能是指实体通过交互(输入与输出)而对其它实体产生的作用或影响,包括实体间功能和实体外功能。实体间功能是系统内部不同实体间的互相作用和影响;而实体外功能指所有实体组成的系统整体对外部环境实体产生的作用和影响,即经典系统理论中的系统功能。
3)任务实体:任务实体对应系统中的各类组元。按实体的主动性可将任务实体分为主动实体和非主动实体,主动实体是指具有自我意识,可以采取自主行动的实体,是任务的发起者和作用者。非主动实体是指无自我意识,不会主动采取行动的实体。主动实体能够通过自身的能动性与非主动实体进行交互,从而改变其状态,而非主动实体既可以是主动实体交互的对象,也可以为主动实体与外部环境实体的交互提供手段、工具和平台等条件。
4)实体关系:实体关系对应系统中各组元的结构组成。既包括各实体的空间分布与联接方式,也包括了实体交互产生的物质、能量和信息的流通方向。研究实体关系,既要从静态的角度出发描述各实体间的结构层次关系,也要从动态角度出发描述系统各实体间的活动映射关系。
5)实体状态:实体状态是任务实体所有可以被观察和识别出来的内部参数和外部形态的统称,是系统在某一特定时刻的静态特征。实体状态的变化即产生了系统的运行,引入实体状态的目的就是要明确系统组元的各方面属性,通过监测和观察其变化特征来为系统的动态研究提供依据。不同实体状态参数的聚合通常可以表述整个系统的状态参数,但有的系统状态参数也可以就是某个实体的状态参数。
6)实体行动:实体行为表明系统组元随时间的推移而产生的状态变化过程。通过对实体行为建模可以全面、详细、准确的描述系统中所有实体的各种行为特征和行为机制,从而可以在微观层面揭示系统的运行机制。
六元概念模型之间相互关联、相互补充,其建模粒度的确定、建模空间的界定都必须以系统建设需求为目的,其建模过程就是围绕系统需求不断分析、不断改进、不断迭代的过程。
3 陆军装备保障系统概念建模
3.1 空间视角(Environment Viewpoint)
1)任务概述视图E-1
任务概述模型是系统任务的总体概述信息的集合,旨在确定系统的研究范围和总体综述。主要包括任务的时间、空间边界、任务的对象和各种支持资源等。
通过查阅的资料可知[11~14],信息化条件下的空袭打击与防护已经发展为多军兵联合、多种手段并举的体系对抗。陆军作为地面中近程防空反导主要的力量,是机动防空、反精确制导和末端拦截防空作战的关键一环[15~16]。基于包含多军兵种的联合保障网络,建立陆军装备保障任务视图概述如图2所示
基于上图的描述,把陆军装备保障任务归纳为:指挥计划、维修保障、供应保障、运输投送保障、联合协同五类。任务概述视图是概念模型体系框架的总则,其它的模型都要围绕任务模型来构建和描述。
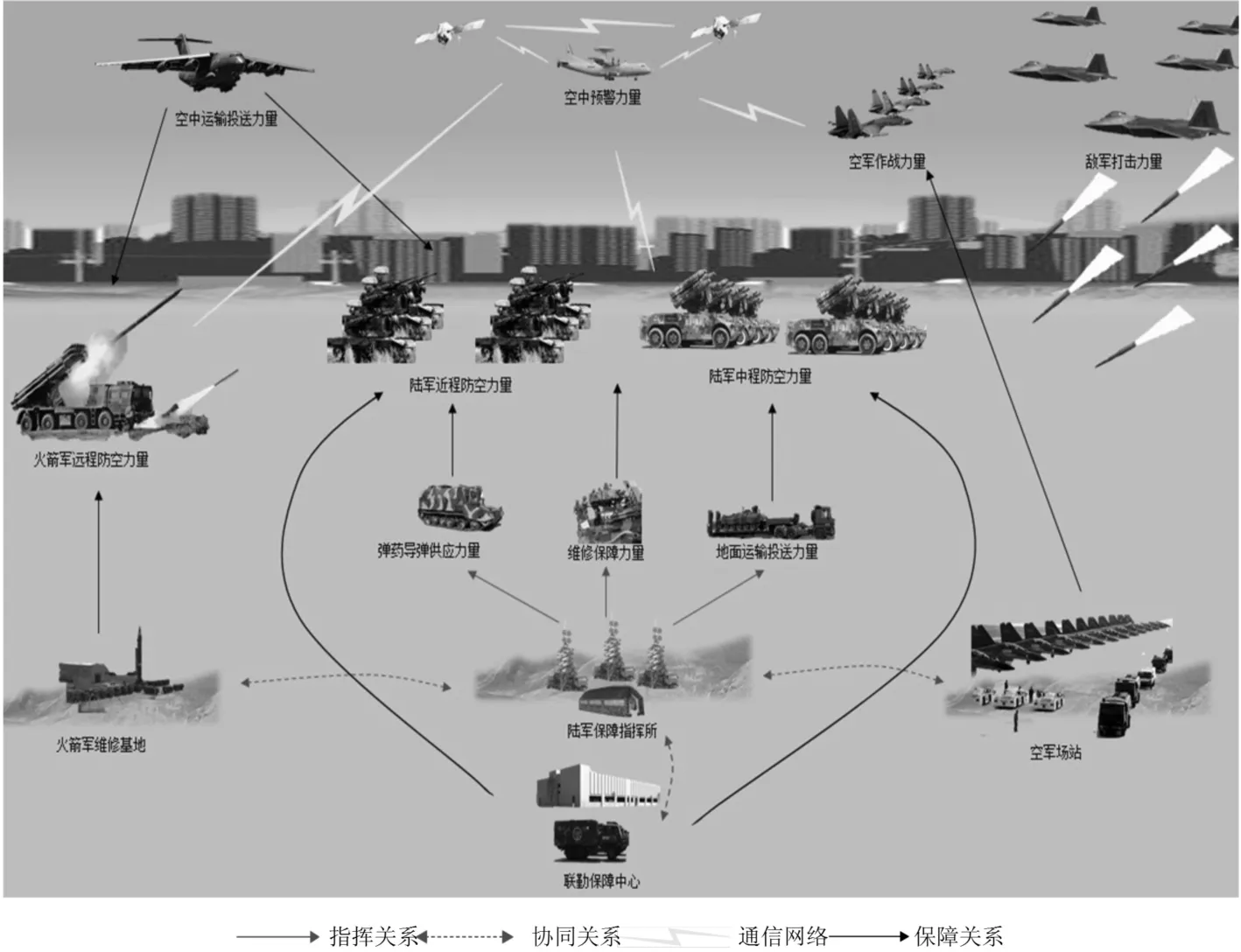
图2 装备保障任务概述视图
2)任务时空视图E-2
该模型描述对装备保障活动构成影响的时间、空间因素,任务空间参数表可根据本级首长的保障决心图、装备保障方案和战场态势的变化过程进行绘制和修改。参数选择如表1所示。
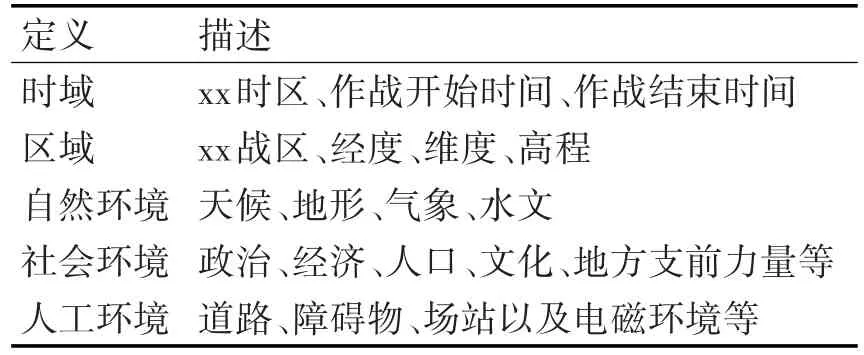
表1 任务时空参数
关于任务时空参数,根据军事人员层级的不同,面对的时空参数粒度也不同,如战区级指挥员需要的时空参数最全,而战术级可能只需要掌握某一行动地域的参数即可,研究时可根据需要具体选择。
3.2 实体功能视角(Function Viewpoint)
保障功能由保障任务(E-1)决定,而不同功能由不同实体间的交互产生。
1)外部功能视图F-1
在研究陆军装备保障系统外部功能时,把敌方力量、我方主战力量、联勤保障中心、空军场站及其它友军支援力量都看作环境实体,把所有系统实体作为一个整体,只考虑输入和输出的作用形态,可以利用黑箱建立外部功能模型如图3所示。
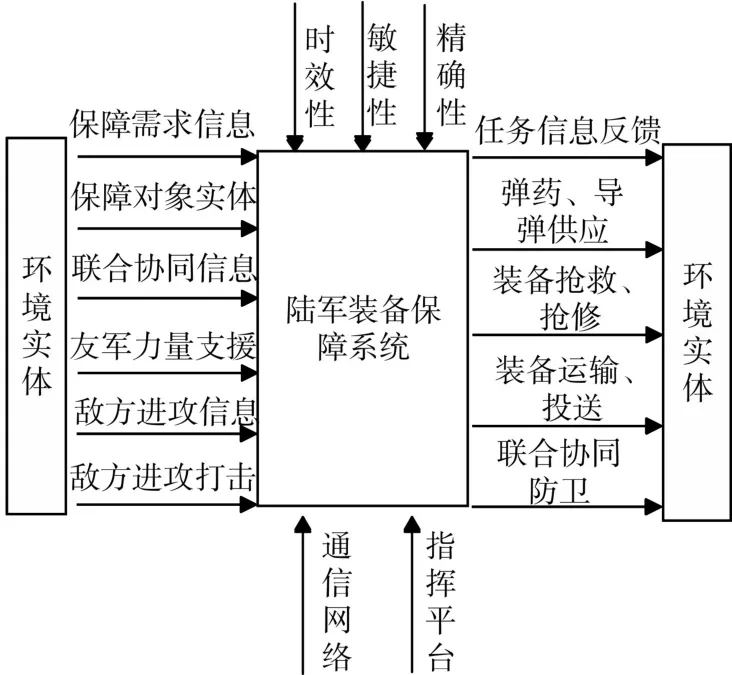
图3 系统外部功能视图
2)内部功能视图F-2
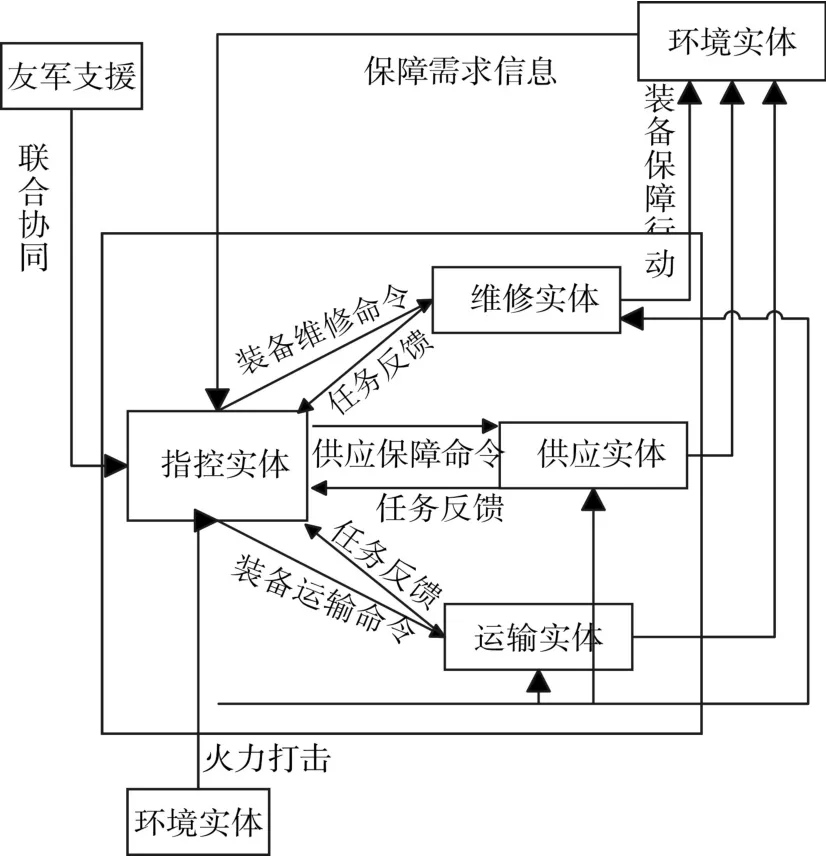
图4 系统内部功能视图
系统内部实体之间,根据功能相互作用和影响,形成不同的交互,一个实体间交互的输出通常是另一个交互的输入,系统内部实体间交互的最终输出即为系统的外部功能,建立内部功能模型如图4所示。
3)为进一步表达交互的各项内容,还应该建立交互参数模型,以装备抢修交互为例,其参数模型如表2所示。
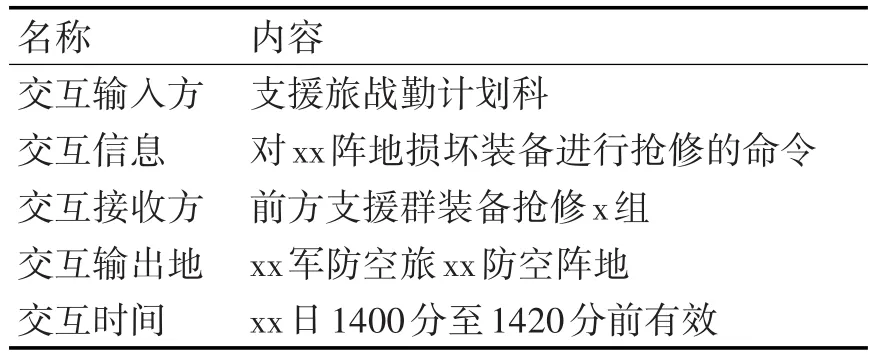
表2 装备抢修交互参数表
3.2 任务实体视角(Component Viewpoint)
任务实体视角,是对装备保障系统的组元进行分类和描述。由于装备保障功能发挥的核心因素是人的能动性发挥,所以在上文按功能分类后,还应该按实体的能动性建立能动主体和非能动主体模型来进一步区分系统实体。
装备保障系统的能动主体主要包含指挥人员和保障人员,非能动主体主要包括各类保障装备、物资、器材等,这些资源集成在一起可称为保障平台。以此可构建指挥控制人员模型(C1-1)、指挥控制平台模型(C1-2)、维修保障人员模型(C2-1)、维修保障平台模型(C2-2)、供应保障人员模型(C3-1)、供应平台资源(C3-2)、运输投送人员模型(C4-1)、运输投送平台模型(C4-2)。
下面以C2-1和C2-2为例建模如表3、4所示。
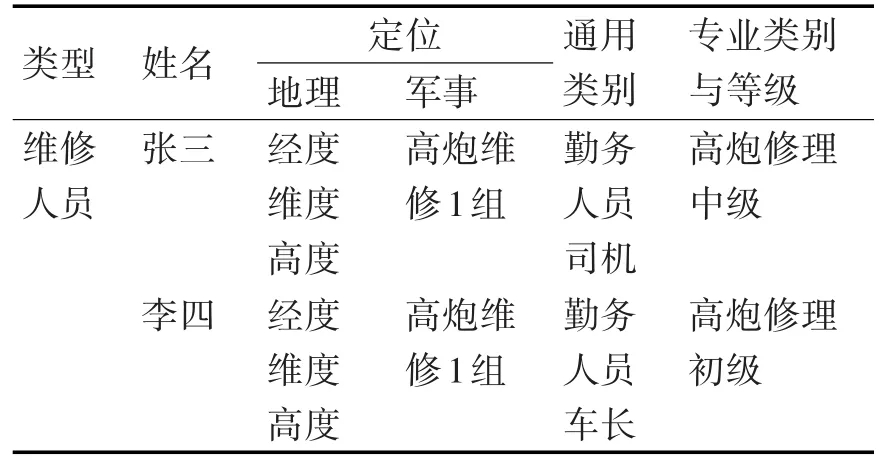
表3 维修保障人员参数表
定位:一般用地理和军事两种方式表达。地理通常采用坐标系,是各军种的通用表达类型;军事定位是指根据实体类型和任务类型确定的特殊表达方式,如作战班组、飞行班组等。
通用类别:一般可根据任务类型分类。如:指挥人员、作战人员、勤务人员;司机、车长、指挥首长、翻译人员;火力机动平台、勤务机动平台、勤务机动场所等。通用类别的合理区分是研究实体权重的重要根据。
专业类别和等级:是指人员进行专业行动的类别和人员本身的等级。专业行动如特种侦察、装备修理、排雷排爆、防化洗消等。人员等级是研究中评价实体效能的重要参数。
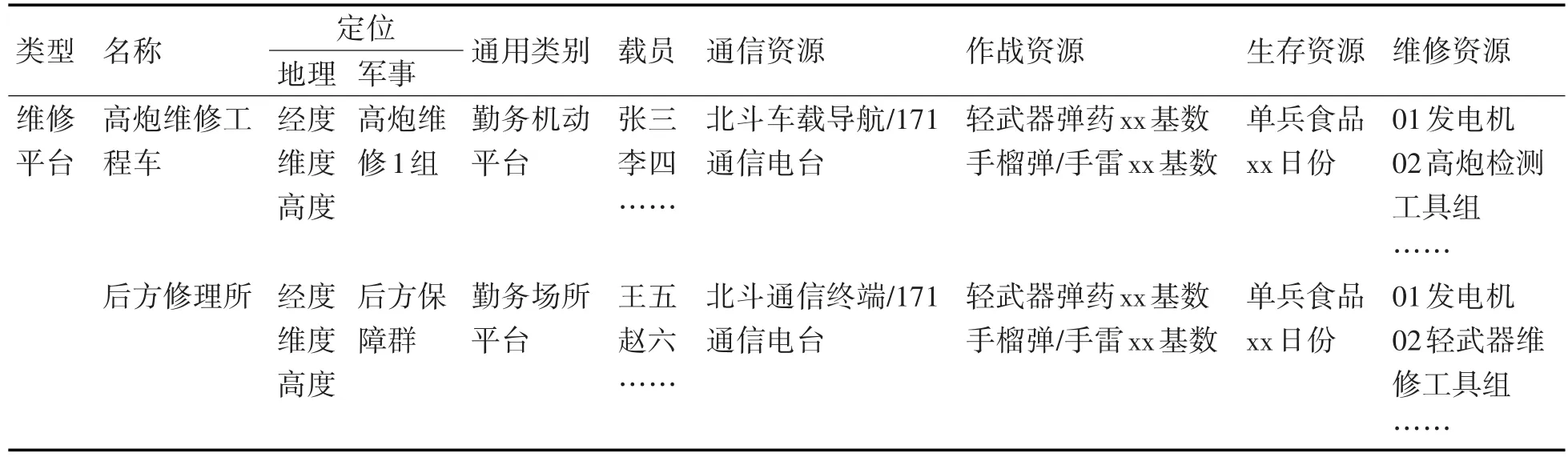
表4 维修保障平台参数表
3.4 实体关系视角(Relation Viewpoint)
实体关系视角根据作战行动的具体编组方式,描述实体的组织结构关系和作战行动关系。城市防空作战中陆军以防空旅为主要作战力量,其装备保障系统的组织结构可分为旅本级伴随保障力量和其他支援保障力量两大类,建立组织关系视图如图5所示。
除了描述系统实体的组织关系外,还要对实体间的活动关系进行描述,保障活动关系根据实体类型可分为指挥关系、协同关系、保障关系、支援关系等,建立活动视图模型如图6所示。
基于图6,描述防空作战行动中的保障活动关系:旅保障指挥所指挥包括本级和支援级的所有保障力量;协同空军指挥所进行装备、器材的投送活动;协同联勤中心由相应的仓库对弹药导弹、器材进行供应、由运输投送部队对运力进行支援;协同军种的基地级维修力量,对后送的损坏装备进行维修。
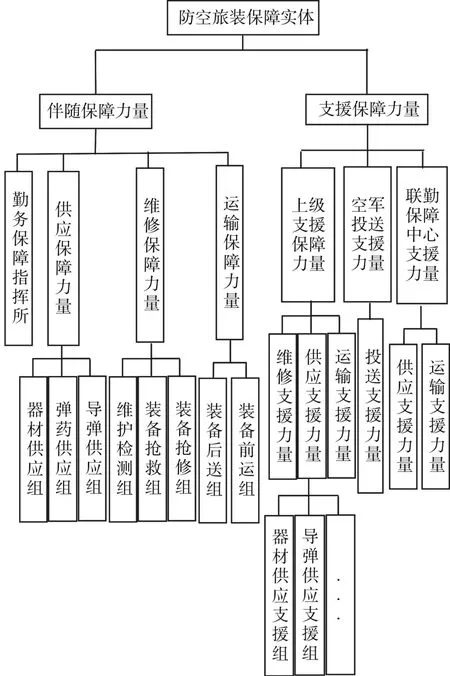
图5 装备保障实体组织关系视图
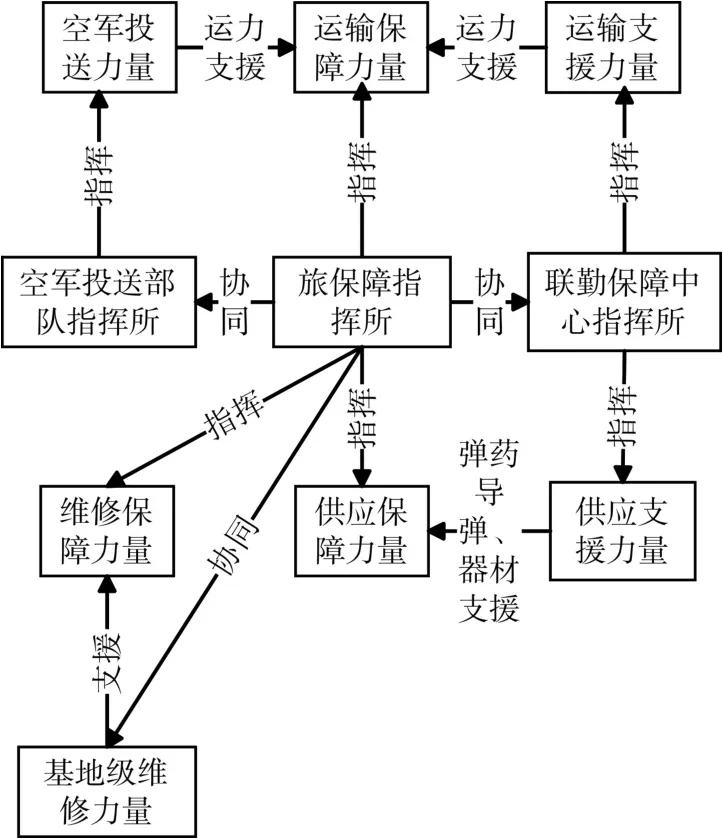
图6 装备保障实体组织关系视图
3.5 实体状态视角(Status Viewpoint)
实体状态视角对上述任务实体的内部参数和外部形态属性变化情况进行描述。
以维修保障实体C2为例,选择以各维修保障组为最小粒度实体,根据影响指挥决策的各类指标分别建立人员和平台的状态模型S2-1、S2-2,如表4、5所示。
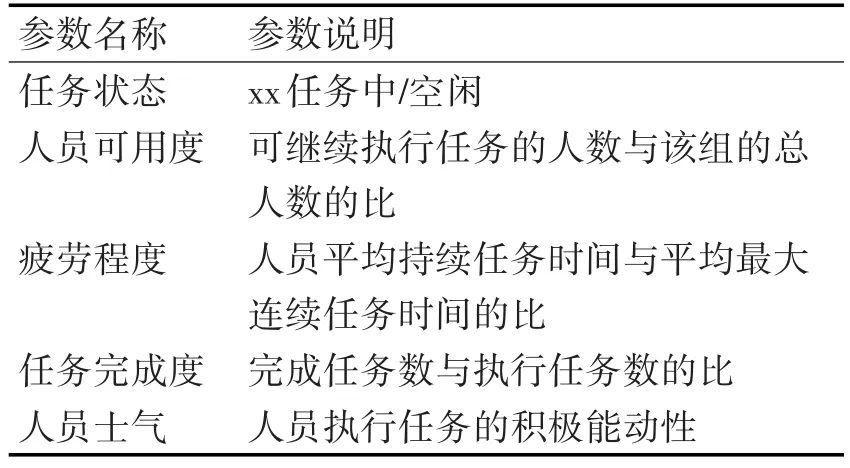
表4 维修1组人员状态参数
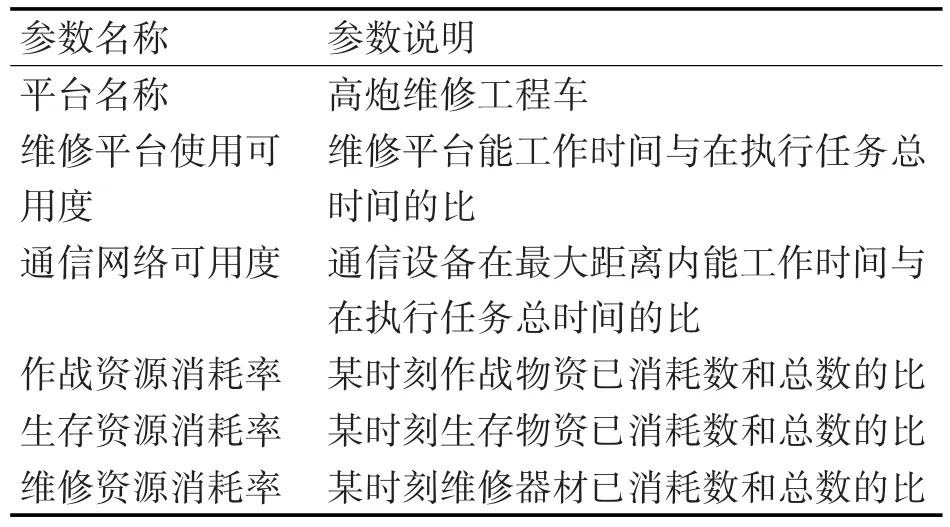
表5 维修1组平台状态参数
3.6 实体行动视角(Operation Viewpoint)
最后,可从实体行动视角建立行动分解树模型O-0和根据实体具体活动建立相应的行动追踪模型。
行动分解树是将任务实体行为中所有的子为从最高层开始,逐步向下扩展,分解过程要注意系统行为的完整性,行为层次的聚合要能够体现系统的内外部功能,如图7所示(由于篇幅限制只分解抢救抢修行动)。
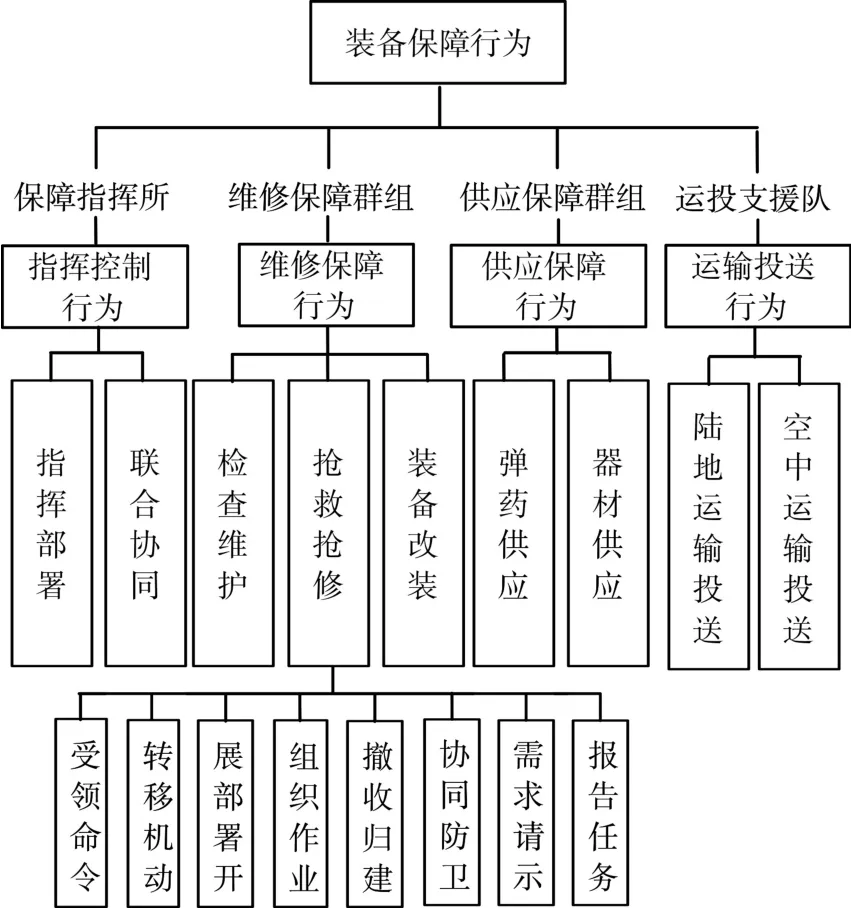
图7 装备保障行为分解树视图
行为追踪视图是对某一行为流程进行具体描述,过程中体现实体功能的输入、输出和实体状态的变化。以维修保障实体C2进行维修活动为例,建立行为追踪视图O-2如图8所示。
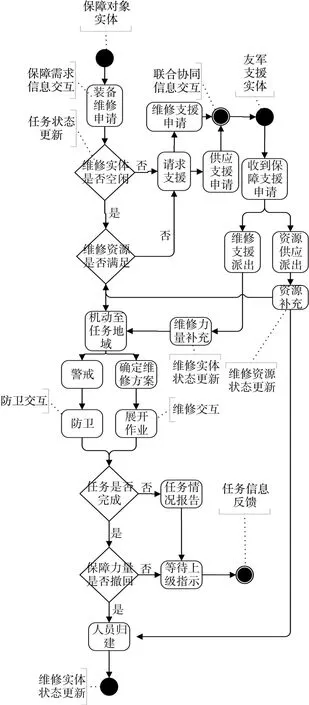
图8 维修活动行为追踪视图
4 结语
本文笔者运用了系统六元抽象理论对城市防空作战中陆军装备保障系统进行了分析,从任务空间、实体功能、任务实体、仿真实体、实体状态、实体行为六个视角构建了一套包括能够全面描述陆军装备保障系统的概念模型体系框架,能够使指挥员全方位对系统的各要素进行把握从而提出建设需求,也能够为技术人员后续的系统开发提供一种标准和范式。基于本文,应该继续对概念模型向数学解析模型、计算机仿真模型的转化进行进一步的研究。