GPS软件接收机载波跟踪参数的设计与实现
2018-08-15孙慧萍孙彩锋
孙慧萍,王 强,孙彩锋,杨 磊
(山西大同大学物理与电子科学学院,山西大同037009)
GPS能很好定位和跟踪信号,但在高动态环境下,会产生很大的多普勒频移。GPS的动态性能主要由载波跟踪技术决定。本文设计了Costas载波跟踪环。通过仿真实验,验证了此方法的正确性。
1 GPS载波跟踪环软件的实现
当码跟踪环路已经同步时,载波跟踪采用Cos⁃tas环,如图1所示[1-2]。

图1 Costas环
1.1 载波跟踪原理
GPS信号是伪码扩频且进行BPSK调制的信号,伪码的值为1或-1。通过码跟踪环产生的本地伪码与接收的GPS信号相乘可以消除伪码部分,解扩之后的载波跟踪环输入信号(忽略噪声):

式中,ac、D(k)、ts、φ0、fd(k)、ωIF分别表示接收的GPS信号幅度、GPS数据码、采样间隔、GPS信号的初始相位、瞬时多普勒频移、GPS信号的数字中频频率。因多普勒频移使本地产生的信号和卫星信号的载波在频率、相位上存在偏差。环路的载波NCO产生的本地同相和正交信号为:


GPS信号经过本地载波解调、积分累加之后送给载波跟踪环鉴别器,其表达形式为:

式中,D(i)、A、Δfd(i)分别表示GPS数据码、相关累加后的信号幅度、第i时刻多普勒估计残差,θei=2πΔfd(i)·its+θ0为在第i个时间间隔内的平均相位误差,Ti表示第i个时间间隔的预检测积分时间,θ0表示载波环路初始相位差。
1.2 鉴别器
Costas的鉴别器有四种算法,如图2所示。

图2 鉴别器
采用二象限反正切法的相位鉴别算法,四象限反正切法的频率鉴别算法[2]。表达式:
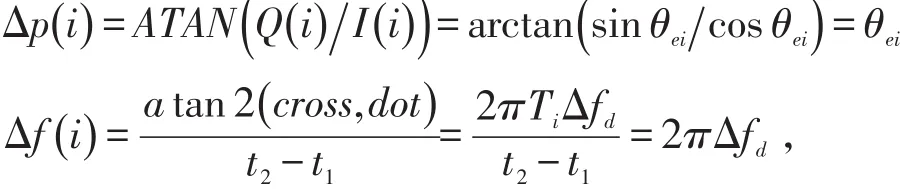
式中,Δp(i)、Δf(i)分别为第i时刻鉴相器的输出、鉴频器的输出,(1、2表示相邻两次积分输出的先后次序)。
1.3 环路滤波器
设计的是二阶锁频环辅助三阶锁相环的环路滤波器,如图3所示。
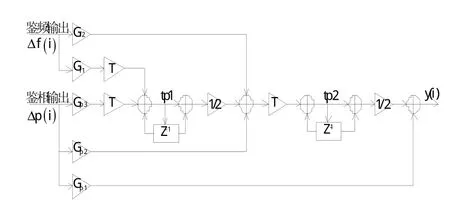
图3 环路滤波器
环路滤波器输入与输出间的关系式:

1.4 载波NCO
数字控制振荡器(NCO),它是由一个L比特的寄存器、全加器构成,将预先计算的精频赋给累加器作为初始值,比较由查表得到的信号和GPS输入信号频率的差,再和寄存器的值累加,作为新频率的查表值。
2 GPS载波跟踪环参数的选取
软件GPS接收机通常工作在动态,因此要对滤波器带宽和环路频率的更新时间进行分析,选择最优的参数值,保证环路稳定工作。
2.1 载波跟踪环路带宽
载波跟踪环路满足锁频环辅助锁相环。PLL相位和FLL频率的误差包含:热噪声抖动误差、基准振荡器振动与阿仑偏差引起的抖动误差、动态应力误差[1],后两个误差可忽略。热噪声抖动误差表示为:

动态应力误差表示为:
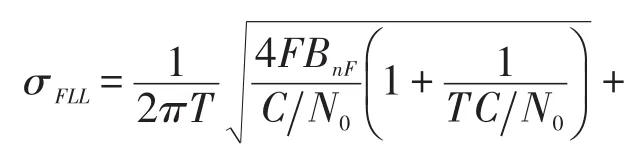

这两部分构成总误差。BnP、BnF为PLL、FLL环噪声带宽(Hz),C/N0、T、d3R/dt3分别为载波噪声功率比(dB-Hz)、预检测积分时间(s)、最大视距加加速度动态(度/s3)。F在高信噪比时为1,在接近门限时为2,n为FLL阶数。PLL与FLL跟踪门限是跟踪误差的3σ抖动,要小于或等于各自鉴别器牵引范围的25%。采用二象限反正切鉴别器,牵引范围为180°;采用四象限反正切鉴别器,牵引范围为1/T(Hz)。锁相环和锁频环路跟踪门限分别为:

当取C/N0=35dB-Hz、T=1ms、动态最大加加速度为6g/s(g=9.8m/s),可计算出频带宽度最小值分别为:BnPmin≥10.61Hz、BnFmin≥0.59 Hz。
对三阶PLL来说,最大带宽为18 Hz,对FLL来说,它的最大带宽不超过8 Hz。PLL和FLL环路热噪声误差、动态误差随着带宽变化如图4、图5所示。
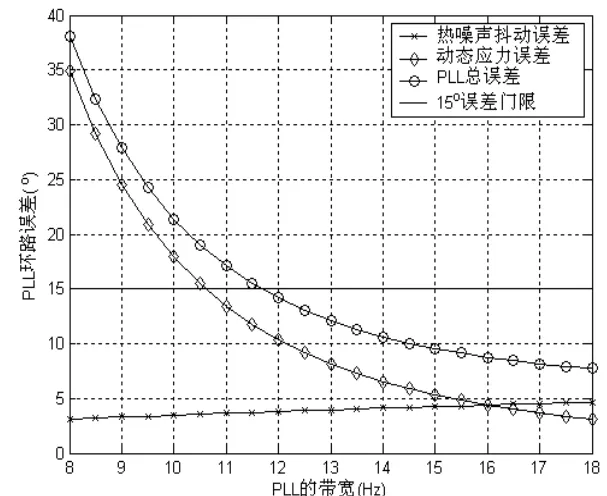
图4 PLL误差随带宽变化
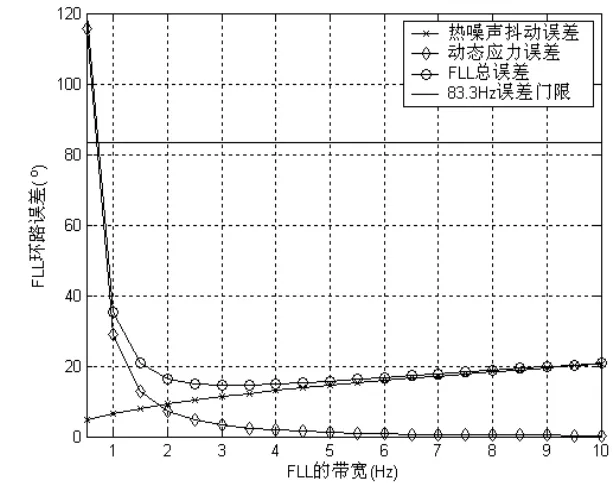
图5 FLL误差随带宽变化
2.2 环路频率的更新时间
多普勒频率变化率与跟踪环更新频率成正比。卫星运动引起的多普勒频率变化率很小,跟踪环路的更新频率也很低。L1载波的多普勒频率的变化率可表示为:

式中,dvd/dt为引起多普勒效应的加速度,fr、c为L1载波的频率(1575.42 MHz)、光速(3×108m/s)。若dvd/dt取7g,则L1载波的多普勒频率变化率可为:

因此,载波跟踪环不大于2.8 ms就要对频率更新。
3 仿真结果
按照前面的分析,设置了Costas载波跟踪环。首先设置采样频率为5 MHz,GPS信号为1.25 MHz的数字中频信号。用Matlab进行仿真,得到如图6所示的结果。从图6可以看出,跟踪的频率最后和实际的载波频率一致,基本达到了载波跟踪的目的。
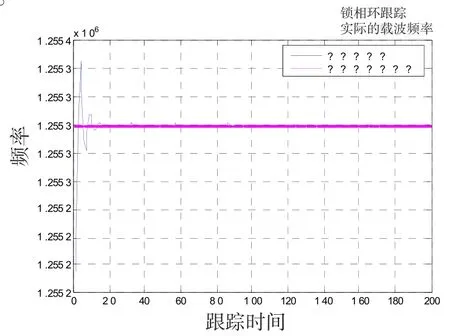
图6 载波跟踪结果
4 结论
本文介绍了GPS载波跟踪环的设计。首先,介绍GPS载波跟踪环软件的实现;其次,分析GPS参数的设计;最后,对GPS载波跟踪环进行了仿真实验。结果表明:此环能很好地跟踪GPS信号,只是时间上有点延迟(允许范围内),效果良好。