Refined Jensen-Based Multiple Integral Inequality and Its Application to Stability of Time-Delay Systems
2018-08-11JidongWangZhanshanWangSeniorMemberIEEESanboDingandHuaguangZhangFellowIEEE
Jidong Wang,Zhanshan Wang,Senior Member,IEEE,Sanbo Ding,and Huaguang Zhang,Fellow,IEEE
Abstract—This paper investigates the stability of time-delay systems via a multiple integral approach.Based on the refined Jensen-based inequality,a novel multiple integral inequality is proposed.Applying the multiple integral inequality to estimate the derivative of Lyapunov-Krasovskii functional(LKF)with multiple integral terms,a novel stability condition is formulated for the linear time-delay systems.Two numerical examples are employed to demonstrate the improvements of our results.
I.INTRODUCTION
TIME-DELAY is inevitably encountered in practical systems including inferred grinding models,automatic control systems and so on[1]−[7].It may degrade the system performance or destabilize the systems under consideration.Therefore,the stability analysis of time-delay systems has received an increasing interest[8]−[13].
Lyapunov stability theory is a favorable tool to study the stability of time-delay systems.Not only the choice of the Lyapunov-Krasovskii functional(LKF)but also the estimation of the derivative of LKF shows their comprehensive influence on the stability criteria[14]−[18].Very recently,many powerful inequalities have been proposed,and their applications to stability[19]−[22]have shown an impressive improvement,such as the Wirtinger-based integral inequality[23],free-matrix-based integral inequality[24],refined Jensen based inequality[25],and Bessel-Legendre inequality[26].It is noteworthy that almost all of the mentioned inequalities deal with only a single integral termuT(s)Qu(s)ds(u is the state vector or the derivative of state vector).
It is well-known that the choice of the LKF plays a crucial role in deriving less conservative stability criteria.Up to now,two classes of LKFs are usually considered to study the stability analysis of time-delay systems:the augmented LKF and the delay-partitioning-based LKF.A common feature of the two classes of LKFs is that they include several double or triple integral terms.Looking at the literatures on the subject[27]−[29],one can find that the stability criteria derived by choosing triple integral forms of LKF are universally superior to those derived by choosing double integral forms of LKF.This phenomenon seems to reveal an interesting law:increasing the multiplicity of the integral terms in LKF helps to yield less conservative stability results.In fact,this law has been shown in[30]−[33]where the multiple integralhas been taken as an element of LKF.Specially,in[32],this law has been theoretically proved by using matrix analytical technique.However,in[9],[30]−[32],the derivative of LKF is manipulated by the free-weighting matrix technique,Jensenor Wirtinger-based multiple integral inequality,respectively,which leaves much room for improvement.With this observation,one of the goals of the present brief is then to develop a new multiple integral inequality.Whereafter,it is employed to develop an improved stability criterion of time-delay systems.
In this paper,we are further concerned with the stability analysis of time-delay systems via the multiple integral approach.Firstly,a novel multiple integral inequality,named refined Jensen-based multiple integral inequality(RJMII),is proposed.We show that the proposed inequality encompasses some existing ones.To proceed with,the inequality is applied to estimate the derivative of LKF with multiple integral terms,a new delay-dependent sufficient condition is then formulated to warrant that the considered time-delay system is globally asymptotically stable.Finally,our result is verified by two comparison examples.
Throughout this paper,Rndenotes the n-dimensional Euclidean space,Rn×mis the set of all n × m real matrices.For real symmetric matrix X,X>0(X≥0)means that X is positive definite(respectively,semidefinite).Indenotes a n-dimensional identity matrix.0n×mdenotes a n × mdimensional zero matrix.The superscripts “−1”and “T”represent the inverse and transpose of a matrix,respectively.“∗”is used to denote a matrix that can be inferred by symmetry.“⊗”stands for the Kronecker product.
II.REFINED JENSEN-BASED MULTIPLEINTEGRAL INEQUALITY
In this section,we present the RJMII based on the refined Jensen-based inequality in[25].
Lemma 1(Refined Jensen-Based Inequality[25]):For any positive definite symmetric matrix M ∈Rn×n,and continuous vector function x:[a,b]→Rn,the following inequality holds

Based on Lemma 1,we can obtain the following lemma.
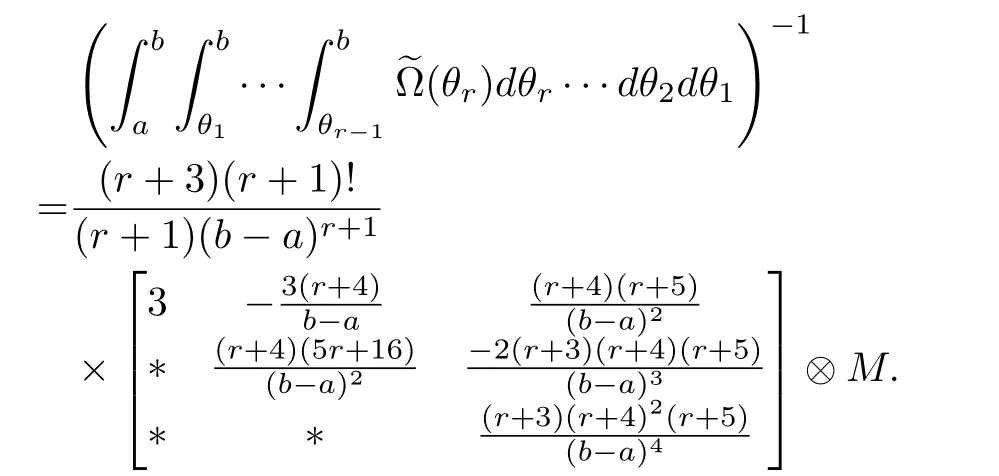
Lemma 2(RJMII): For any positive definite symmetric matrix M ∈ Rn×n,non-negative integer r,and continuous vector function x:[a,b]→Rn,the following inequality holds for a ≤ θ1≤ θ2≤ ···≤ θr≤ b:

Proof:Based on Lemma 1 with the facts
the following inequality holds for any a<θr<b:


We can verify that Ω(θr)is invertible since matrix M is positive definite.Thus,by Schur complement[34],(5)is equivalent to the following inequality:
We can obtain from(6)that
By Schur complement[34],one has from(7)that
where
Rearranging(8)yields(2).
Remark 1:By the refined Jensen-based inequality(i.e.,Lemma 1),several stability criteria for linear time-delay systems have been developed in[25].Since the refined Jensen based inequality is superior to the Jensen-and Writinger-based inequalities,the approach in[25]leads to improved conditions in comparison to some existing results,such as the results in[23],[24],[27].However,this inequality is merely applied to the LKF with double integral terms.In Lemma 2,the refined Jensen-based inequality has been extended to the multiple integral version which can be utilized to estimate the derivative of LKF with multiple integral terms.Particularly,we can verify that the RJMII(2)includes the refined Jensen-based inequality(1)as a special case with r=0.
Remark 2:If the last two terms in(2)are removed,Lemma 2 is reduced to Lemma 1 in[30],i.e.,the Jensen-based multiple integral inequality.Clearly,Lemma 2 offers a more precise lower bound for the integral term on the left of inequality(2)than the Lemma 1 in[30]since χTaMχa> 0,χTbMχb> 0 for χa/=0,χb/=0.Similarly,one can verify that Lemma 2 is also an improvement of the Lemma 1 in[31],i.e.,the Wirtinger-based multiple integral inequality.
It is well-known that the LKF usually takes into account the integral quadratic terms of variable˙x(·).Thus,by the factx[r−1],we present the following lemma which is also an instrumental tool in the derivation of stability criterion.
Lemma 3:For any positive definite symmetric matrix M ∈ Rn×n,non-negative integer r,and differentiable vector function x:[a,b]→Rn,the following inequality holds for a ≤ θ1≤ θ2≤ ···≤ θr≤ b:

III.MAIN RESULT
Applying the RJMII,this section presents a novel delaydependent stability criterion for the following linear time-delay systems:

where x(t)∈Rnis the state vector,A,Ad,and AD∈Rn×nare constant matrices;φ(t)is the initial condition defined over[−τ,0],and the delay τ> 0 is a constant.
Theorem 1:For a given positive integer m and a scalar τ>0,the system(10)is asymptotically stable,if there exist symmetric matrix Pm∈ R(m+2)n×(m+2)n,positive definite symmetric matrices Qi∈ Rn×n(i=0,1,...,m − 1)and Rj∈ Rn×n(j=1,2,...,m)such that the following linear matrix inequalities(LMIs)hold:


Proof:For simplifying the expression of the proof,we first define the following variables:

Let us consider the following LKF candidate with multiple integral terms:

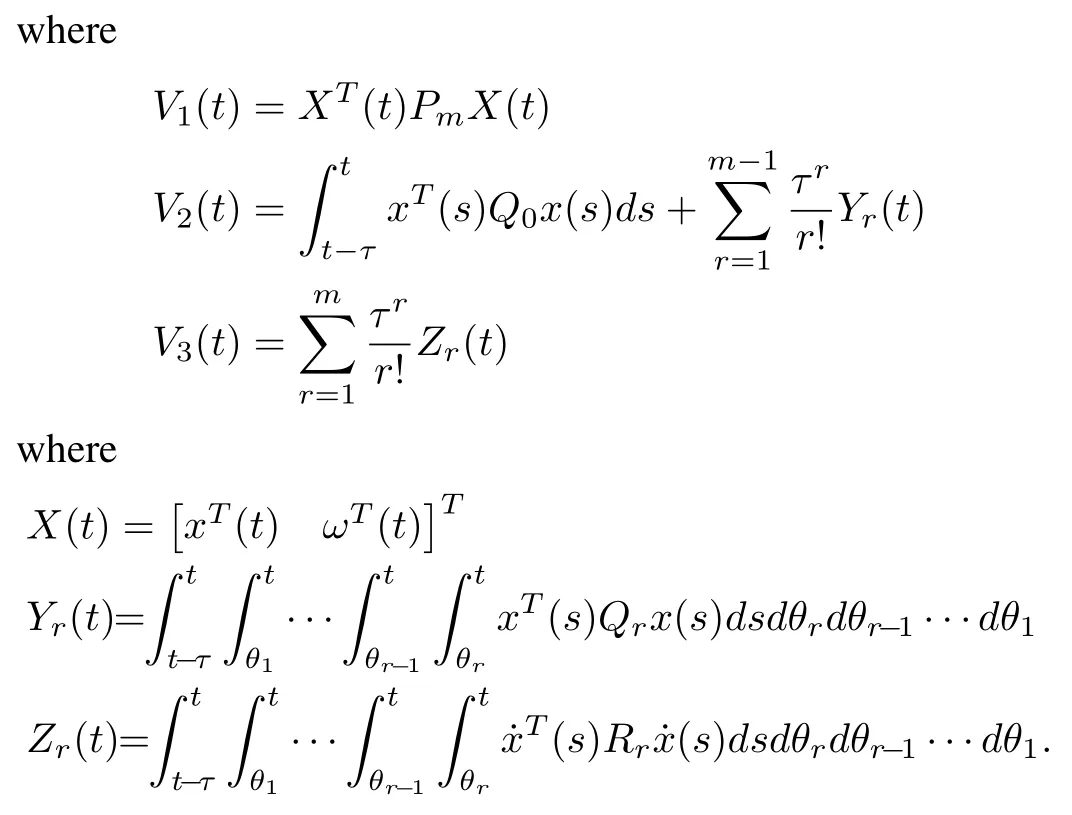
Because Qi>0(i=0,1,...,m−1),Lemma 3 ensures the following inequalities hold:

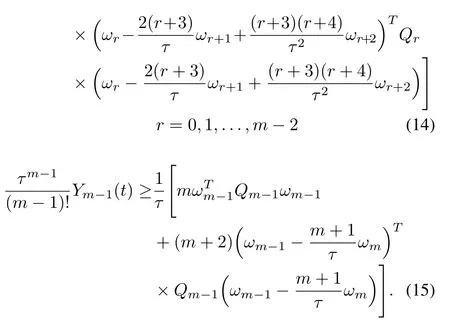
According to(14)and(15),it can be verified that V1(t)+V2(t)≥ XT(t)ΓX(t).Then,from(11),the positive definiteness of V(t)is ensured.
Calculating the derivative of V1(t)along the solution of(10),it yields

Based on Lemma 2 and Lemma 3,the estimations of the derivative of V2(t)and V3(t)are shown at the bottom of this page,respectively.

Obviously,we have from(16)−(18)((17)and(18)are shown at the bottom of this page)that˙V(t)≤ηTΞη(t).Then,based on Lyapunov stability theory,if(12)is satisfied for the given integer m and τ> 0,the system(10)is asymptotically stable. ■
Remark 3:By using the RJMII to estimate the derivative of LKF(13),a novel stability criterion has been shown in Theorem 1.An inevitable problem is that a larger m results in more decision variables in the stability conditions.While the research of LMI-based optimization is a very active area in the applied mathematics,optimization and the operations research communities,the calculating speed of computer is also increasing rapidly,thus calculation of complex LMIs is becoming more and more simple.Then,the verification of the LMIs is not a trouble.It is also a typical tradeoff between better stability criteria and computational complexity.On the other hand,one can see that the larger m uses more information of system(10).It is thus expected that better results can be provided by our approach.
Remark 4:By constructing an augmented LKF with multiple integral terms and establishing a multiple integral inequality to estimate the derivative of LKF,a stability criterion is derived in[30].When the same m is chosen,Theorem 1 in the present brief,compared with the stability conditions in[30],has three conspicuous advantages:
1)The preferable inequalities(2)and(9)are employed to bound the multiple integral terms in the derivative of LKF,which helps us to obtain less conservative result than the one in[30].
2)The Lyapunov matrix Pmin[30]is strictly assumed to be positive definite symmetric,while it is only required to be symmetric in Theorem 1,and the positive definiteness of LKF(13)is ensured by condition(11).
3)The number of decision variables of the stability conditions in Theorem 1 is also less than that in[30](see the example in next section for details).
Remark 5:When m=1,the chosen LKF(13)is reduced to the used versions in[7],[25]:

Remark 6:The multiple integral approach and delay partitioning approach are two completely different ways on the stability analysis of delayed systems.The distance between them is much large:
1)The partitioning approach divides the integral interval[t−τ,t]into[t−ρ1τ,t−ρ2τ],[t−ρ2τ,t−ρ3τ],...,[t−ρjτ,t](0 < ρ1< ρ2< ···< ρj< 1).For each subinterval,there is a corresponding integral term in LKF.While,when using the multiple integral approach,the integral interval is always fixed[t− τ,t]for each integral term in LKF.
2)The delay partitioning approach reduces the conservatism of stability criteria by increasing the partitions of interval[t− τ,t].However,the multiple integral approach achieves its purpose by increasing the multiplicity of the integral terms in LKF.
3)When using the delay partitioning approach,one usually chooses the LKF with double or triple integral terms.But the multiple integral approach focuses on the LKF with arbitrary multiple integral terms.
In Theorem 1,the Lyapunov matrix Pmis merely assumed to satisfy condition(11)rather than to be positive definite symmetric.This technique provides more freedom for the choice of Lyapunov matrices and helps to reduce the conservatism of the stability criterion.To verify its merit by numerical examples,a criterion without such technique is provided as follows.
Corollary 1:For a given positive integer m and a scalar τ>0,the system(10)is asymptotically stable,if there exist positive definite symmetric matrices Pm∈ R(m+2)n×(m+2)n,Qi∈ Rn×n(i= 0,1,...,m − 1),and Rj∈ Rn×n(j=1,2,...,m)such that the LMI(12)holds.
IV.NUMERICAL EXAMPLES
In this section,we check our results by providing two time delay systems(10)which are listed in Table I.By verifying Theorem 1,we obtain Table II which displays the maximal allowable delays or delay ranges for the systems listed in Table I.From Table II,we can clearly see that Theorem 1 is superior to most of the existing results in terms of conservatism.For example,our results are superior to the result in[12]where the delay N-decomposition method is proposed.If the same integer m is chosen,our results are also better than those in[30].One of the main reasons lies in the use of RJMII.Moreover,we can also find that Theorem 1 provides more precise delay ranges than Corollary 1.Take System 2 for an example,Corollary 1 with m=8 reports that the maximal allowable delay of System 2 is 6.1690.but it is estimated as 6.1702 by Theorem 1.This means that the condition(11)is helpful to yield less conservative results.
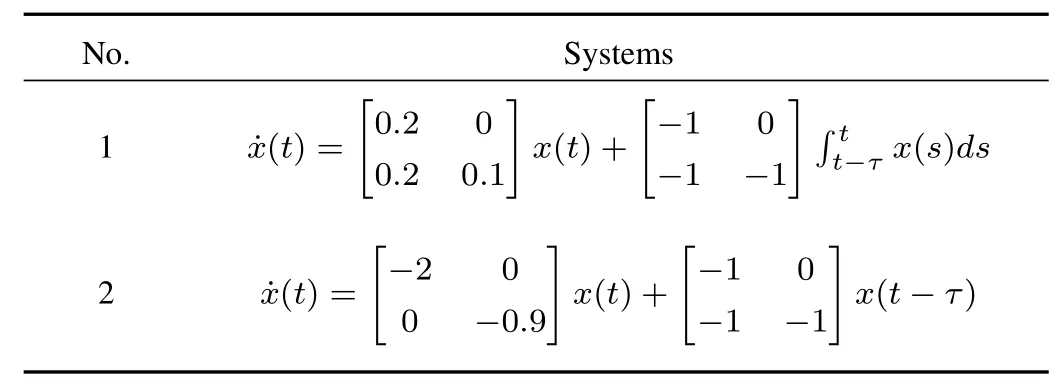
TABLE IUSED SYSTEMS FOR COMPARISON
On the other hand,we can see from Table II that the results in the cases of m=l are better than those in the cases of m=l−1,l=9,10,...,13,and as m increases,the results approach to the analytical delay limit for stability.The numerical experiments verify our theoretical results.
V.CONCLUSION
Based on the refined Jensen integral inequality in[25],this brief has established a multiple integral inequality which was named RJMII.It is shown that the proposed RJMII improves some existing results,such as the Jensen-and Wirtinger-based multiple integral inequalities.The RJMII has been applied to the stability analysis of linear time-delay systems,and the associated stability criterion has been presented.By employing two typical numerical experiments,the effectiveness of our theoretical results has been fully demonstrated.
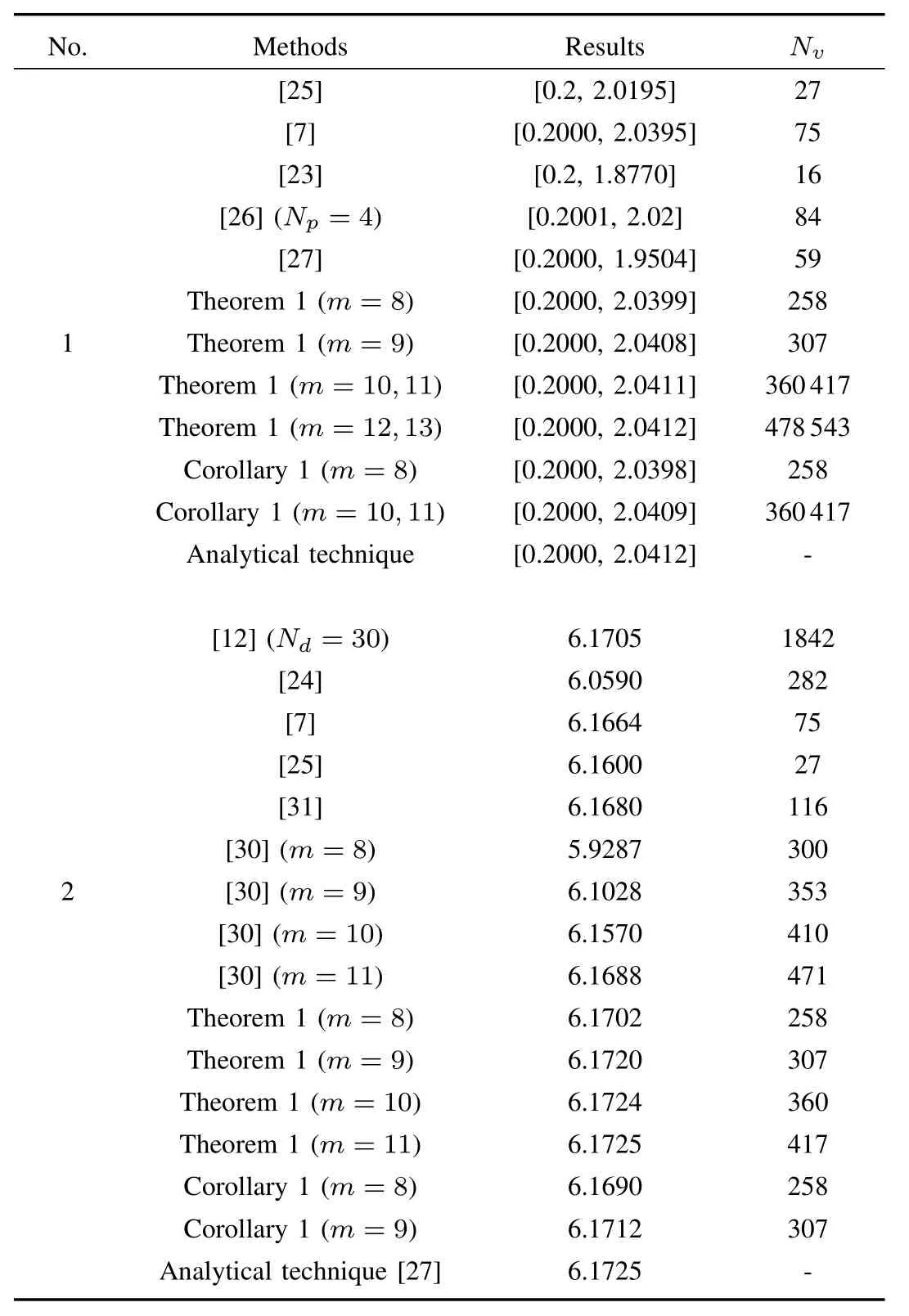
TABLE IIMAXIMAL ALLOWABLE DELAYS OR DELAY RANGES FOR EACH SYSTEM LISTED IN TABLE I
杂志排行

IEEE/CAA Journal of Automatica Sinica的其它文章
- Advances in Vision-Based Lane Detection:Algorithms,Integration,Assessment,and Perspectives on ACP-Based Parallel Vision
- Deep Scalogram Representations for Acoustic Scene Classification
- A Mode-Switching Motion Control System for Reactive Interaction and Surface Following Using Industrial Robots
- Adaptive Proportional-Derivative Sliding Mode Control Law With Improved Transient Performance for Underactuated Overhead Crane Systems
- On“Over-sized"High-Gain Practical Observers for Nonlienear Systems
- H∞Tracking Control for Switched LPV Systems With an Application to Aero-Engines