重卷机组张力神经网络控制器的可视化构建
2018-08-08李联飞刘渭苗程志强杨文峰王小哲
李联飞,刘渭苗,程志强,杨文峰,王小哲,刘 松
(1.中国重型机械研究院有限公司,陕西 西安 710032;2.空军工程大学防空反导学院,陕西 西安 710051)
0 前言
针对重卷机组中张力控制器设计和调整的问题,采用传统方法进行设计时需要对基础理论有较好的认识以便得到合适的结果。智能控制的出现使得解决实际的问题不需要太多的先验的系统知识以及复杂的公式推导。结合智能控制的特性,将智能算法借助于可视化调整获得相应的参数进而投入到实际的应用中可以大大简化张力控制系统控制模型的仿真,为快速搜寻合理的参数提供便利,方便现场快速应用。
可视化控制器的设计,文献[1]将PID控制器参数对系统性能的影响以图像的形式加以直观的显示。在可视化操作中用户可以通过实际图形的颜色对比度直观地看出实际的控制效果,从而可以人工选取较为优化的系统参数用于实际的控制。文献[2-4]借助于性能图对系统的动态特性进行可视化显示和研究,实现了一种可视化神经网络控制器的构建。在对实际系统进行建模的基础上,采用可视化方法手动的调节控制器输入,获得较为理想的跟踪效果,运用学习控制的思想对控制输入进行更进一步的优化。将优化后的被控对象输入以及输出数据提供给神经网络进行学习[5]。为方便进行实际应用,克服神经网络在稳态控制时的静态偏差,本文设计了一种切换策略用以实现神经网络同PI控制器之间的平滑切换,同时实现不同输入作用下神经网络输出的自动调节,通过仿真验证了所提出方法的有效性。
1 可视化构建要求以及控制器优化策略
预期的神经网络控制器采用误差e,误差的差分ec作为神经网络的输入,被控对象控制输入的增量Δu作为神经网络的输出,采用预先设定的网络结构,辨识得到神经网络的参数。实现神经网络的可视化首先需要构建模型和设定参数,如:
(1)被控对象数学模型的构建。数学模型用以仿真得到被控对象在改变控制输入条件下的实际输出,借助于仿真模型的Simulink实现可视化界面对被控对象的输入输出进行曲线显示方便更进一步的调节。
(2)控制输入的预给定。为了快速的得到期望的控制输入,需要预先对被控对象采用PI控制器实施作用,预先得到较好的控制输入,以便进行更进一步的可视化调节。
(3)可视化界面同仿真系统之间的数据交互。可视化界面从仿真系统中获得控制输入作用下的实际输出以及将调节后的控制输入传递到仿真系统中去。
(4)可视化调节。针对鼠标的按下移动事件对控制输入曲线进行动态调整,同时可以直观的得到调节后输入作用下被控对象的实际输出曲线。
(5)基本参数的设定。在可视化界面中对下述基本参数进行设定:采样时间的设定,神经网络的结构参数,学习控制的参数等。
为了得到更为理想的控制输入以及实际输出数据提供给神经网络进行学习,实现神经网络的在线控制,需要制定设计优化策略。
(1)为更进一步的优化手动调节后的控制输入曲线,采用学习控制的思想进行控制输入的学习[6]。设ek(t)为第k次学习t时刻的跟踪误差,uk(t)、uk+1(t)为学习第k次、第k+1次学习t时刻的控制输入,则有
uk+1(t)=uk(t)+l*ek(t)
其中l为学习率,学习控制保证在选择合适的学习率的条件下跟踪误差能够收敛[7]。
(2)神经网络控制器的优化。鉴于神经网络只是对系统运行中特定的误差以及误差的差分序列作用下的控制输入增量进行了辨识,对于实际系统中可能出现的其他情况进行下述处理。
对调节较为理想后的误差e,误差差分ec按大小各自进行等间距的划分(如划分成7段),所属的区间分别为(i,j)其中i=0~6,j=0~6,按区间建立关于误差,误差差分的映射表,确定系统运行中误差的差分区间在映射表中进行标记(标记为11,map(i,j)=11)。对未标记的地方进行按所在行远离最近标记区间的程度进行填充(正数表示相同误差范围内误差变化率偏大控制输入太大,负数相反),如表1所示。

表1 误差差分映射表
对输入的误差差分序列对应的神经网络输出进行处理:设ec每个子区间长度为div,umax为神经网络输出的最大值,对一般系统有emax>abs(emin),emin≤0设控制输出为du,令神经网络的输入为u1,u2对应的输出为out(u1,u2),实际的控制输出计算流程如图1所示。
(3)为提高神经网络控制器的稳态控制性能,减小稳态误差,设计切换策略实现神经网络控制器同调整好的PI控制器之间的切换。
切换策略如下:

e0、e1(e1>e0)分别表示由神经网络控制器切换到PI控制器(1)、PI控制器切换到神经网络控制器(2)时的误差限。
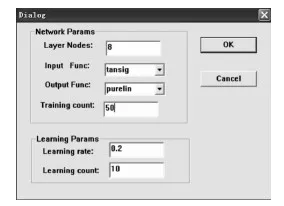
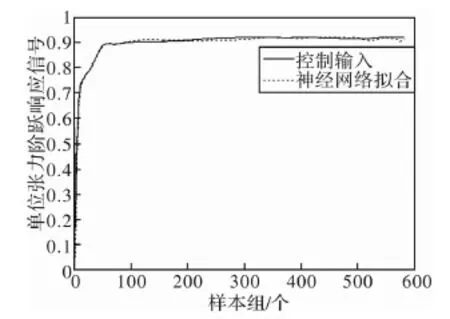
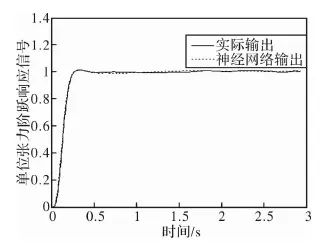
if abs(e) if abs(e)>e1实施第二种切换 图1 神经网络输出优化 为保证切换时的平滑性,实施第一种切换时设定PI控制器的积分值为 E=(u-KP*e)/KI 式中,u为切换时的控制输入,神经网络控制器依据上一次控制输入u输出u+Δu。 为实现可视化调节操作,运用VC++设计可租界面,运用Simulink工具箱建立被控对象的仿真模型,通过VC++调用Matlab引擎函数实现可视化界面同仿真被控对象之间的数据交换。构建被控对象的Simulink模型同构建好的S函数功能块连接,得到可调节的仿真模型。可视化调节界面如图1所示。实现可视化调节以及实际控制器的设计过程。 图2 可视化调节界面 (1)基本参数的设定。设定采样时间,PI控制器的控制参数KP、KI,绘图时纵轴的范围,以及学习控制的学习率学习次数,神经网络的结构参数等,如图3所示。 图3 网络参数、学习参数设定 (2)期望输出轨迹。按照时间函数(Matlab支持的基本函数),或者以期望增益极点传递函数的阶跃响应进行给出。 (3)通过调节KP、KI的设定值,预先得到较为满意的输出响应,以此时的控制输入为基础进行更进一步手动调节。 (4)手动调节的实现。通过线性方式或者贝赛尔曲线方式调节各曲线形状,线性方式下拖拉曲线将曲线对应段的数据表示设定为释放点对应的数据值。贝赛尔曲线方式经作用域内的数据进行采样反向得到对应曲线的控制点,曲线的拖拉操作将改变控制点的位置进而改变曲线的形状。借助于滑块设定调节的作用域,通过放大和缩小操作对曲线的形状进行微调。 (5)通过Matlab引擎函数的调用实现将调节后的输入曲线数据实时的传递到仿真环境中并采集仿真得到的输出数据反映到输出曲线上,以便同期望轨迹加以对比作为进一步调节的依据。 (6)在获得较为理想的跟踪特性后,点击start learning借助于学习控制对控制输入进行更进一步的优化。 (7)神经网络控制器的获得,从优化后的被控对象输入输出数据中提取出各个时刻的输出误差以及误差的差分作为神经网络的输入,控制输入增量作为神经网络的输出对网络进行训练,借助于gensim函数得到神经网络的Simulink实现。 为了保证重卷机组中张力控制系统中张力实际值的稳定性与精确性,同时在干扰存在时有足够的鲁棒性,因此电机电枢电流在动态过程不超过允许值,在突加控制量时超调尽可能的小,应把E电流环校正为典型I型系统。基于稳态无静差和较好的抗干扰性考虑,转速环应当校正为典型II型系统[8]。张力环投入使用时,速度调节器输出为限幅值k,转速开环,转速调节器不再起作用,保持恒张力轧制。电动机电枢电流随张力变化,所以对于张力控制器,电流环为内环。整个张力环动态结构如图4所示,图中WACR(s)为电流调节器;Toi、Tot为电流、张力检测滤波常数;β、γ电流、张力反馈系数;R为电枢电阻回路总电阻;ks为晶闸管装置放大倍数;Ts整流装置滞后时间常数;Tl电枢回路电磁时间常数;Tm拖动系统机电时间常数。 图4 重卷机组张力动态结构图 根据某钢厂实际控制方式,转速开环,速度调节器输出限幅,根据图4的张力动态结构图,带入参数可得整个张力控制系统的传递函数为 式中,KT=4.15~14.7;τT=0.042~0.147;文中KT、τT分别选取为8和0.1。 经过手动调节较为理想的被控对象输入输出特性曲线如图2右侧所示,设定基本参数隐层节点数为6,训练代数50,学习率为0.2,学习代数为20,对控制输入进行跟进一步的学习,利用学习后的控制输入与控制输出数据对神经网络进行训练。神经网络学习后的控制输入与调节后的控制输入曲线对比如图5所示,神经网络拟合输入控制量直接作用于系统的输出于调节后系统输出对比如图6所示。 图5 神经网络拟合控制输入 图6 神经网络输出作用下系统输出 选定PI控制器的基本参数为KP=0.3、KI=8、e0、e1分别为0.03、0.3,进行神经网络控制器同PI控制器之间的切换。图7分别显示了神经网络控制器,PI控制器分别作用以及实施神经网络同PI控制器间切换作用下的被控对象输出曲线 通过仿真可以看出所设计切换策略作用下的神经网络结合了神经网络控制作用下的快速性以及PI控制作用下的无静差特点,达到了预期的效果。同时基于可视化调节得到的神经网络控制器将降低控制器设计以及调试的复杂度。 图7 PI控制器,神经网络NN控制器以及两者结合的输出特性 借助于Simulink以及VC++工具设计了一种可视化神经网络控制器创建工具,通过调节控制输入曲线的形状得到期望的跟踪特性。借助于学习控制进行控制输入的优化,进而提供给神经 网络进行训练。设计了一种切换策略实现神经网络控制器同PI控制器之间的平滑切换,已得到更好的动静态特性。通过重卷机组中张力控制系统的数学模型的仿真验证了所提出方法的有效性。
2 可视化调节界面和设计过程
2.1 可视化调节界面

2.2 设计步骤
3 仿真研究


4 结论
