WSNs中基于RSS的协作式节点定位算法
2018-08-03马永光
马永光, 王 朔, 邢 建, 石 乐
(华北电力大学 控制与计算机工程学院,河北 保定 071003)
0 引 言
近年来,无线传感器网络[1](wireless sensor networks,WSNs)节点定位算法可归为两类:基于测距(range-based)的方法与非测距(range-free)的方法。Range-Based方法通过测量绝对距离或方位角度等信息确定节点位置,定位精度取决于测量的准确性。在基于接收信号强度(received signal strength,RSS)的定位方法中,节点根据无线信道的路径损耗模型,利用RSS值估计距离。RSS值易受环境噪声影响,影响测距的准确性[2,3]。在现有的基于RSS的定位方法[4,5]中,常常忽略噪声对RSS的影响,定位精度差强人意。
诸多定位算法又可以分为非协作式定位[2,6,7]与协作式定位[3,8]。前者仅仅利用未知节点与每个锚节点间的测量距离,逐个确定每个未知节点的位置信息;后者则利用网络中包括未知节点在内的所有节点间的测距数据,同时确定全部未知节点的位置。受节点成本与监测环境复杂程度的制约,网络中锚节点的数量十分有限,协作式定位往往能够实现更高的定位精度。
本文在充分考虑了噪声因素的基础上,将加权最小二乘法(weighted least squares,WLS)与多维标度分析法(multidimensional scaling,MDS)相结合,提出了一种新的基于RSS的协作式定位算法—WLS—MDS。
1 RSS测距的基本原理
1.1 路径损耗模型
通过在不同环境下的反复测量与理论分析,通信节点间的欧氏距离d与接收信号强度P满足Log-Normal Shadowing Path Loss模型[9]
P=P0-10nplgd+ω
(1)
式中P0为距离信号源d0;d0为参考距离(通常取d0=1 m)处的接收信号强度;nP为路径损耗指数;ω为具有方差
σ2的零均值高斯白噪声。在某一特定的环境下σ2是一个与距离无关的常数。
1.2 dm无偏估计
为避免在噪声强度较大的环境下常规dm简化模型引起更大的测距误差,导致定位精度的恶化,本文在已知σ的情况下,采用文献[10]中提出的dm的无偏估计量m构造距离矩阵
(2)
令Y=lnm,发现Y满足均值为方差为λ2σ2的正态分布,则m服从对数正态分布,其数学期望与方差为
E(m)=dm,var(m)=d2m(eλ2σ2-1)
(3)
2 MDS的基本原理
WSNs由分布在二维空间中的M+N个传感器节点组成,节点位置信息由平面直角坐标系中的坐标值唯一确定,其中,第i个节点的坐标向量xi=[xiyi]T。不失一般性,假设前M个节点为位置已知的锚节点,后N个节点为需要定位的未知节点。对网络中每两个节点所组成的节点对作如下划分
(4)
式中Θ1为每两个锚节点组成的节点对的集合,Θ2为每两个未知节点组成的节点对的集合,Θ3为每个锚节点与每个未知节点组成的节点对的集合。由锚节点与未知节点的坐标所组成的坐标矩阵分别为Xa=[x1x2…xM],Xs=[xM+1xM+2…xM+N],网络中所有节点的坐标矩阵为X=[XaXs]。根据MDS的基本原理,X的中心化内积矩阵
B=JXTXJ=-0.5JDJ
(5)

D=

(6)
3 WLS-MDS定位算法
在实际的应用环境中,由于高斯白噪声的存在,Θ2与Θ3中包含的节点对之间的实际距离无法精确测量,只能根据d2的估计值构造矩阵D,此时X的中心化内积矩阵近似的表示为
(7)
式中
根据前文的推导结果,这里用dm的无偏估计来构造矩阵D。令m=2,则

在考虑噪声的情况下,将式(6)改写成
(8)
对式(8)等号两侧同时进行向量化操作
(9)
式中hR,ξ和xs分别为R,Ξ和Xs的向量化运算结果,⊗HL。

(10)
式中W为权值矩阵,根据文献[8],W的最佳取值为马尔可夫估计
W=[cov(ξ)]
(11)
根据式(8)与式(10)

(12)

i=1,…,M+N
(13)
式中Eγ,i=[eα(i,1)eα(i,2)…eα(i,i-1)]T,i=2,…,M+N;Eδ,i=[eα(i+1,i)eα(i+2,i)…eα(M+N,i)]T,i=1,…,M+N-1;α(x,y)=0.5[2y(M+N)-2(M+N)-y2-y]+x。

W=(FΨCdΨTFT)
(14)
式中Cd为d的协方差矩阵,由于节点间RSS的测量相互独立,Cd为对角矩阵。并且根据式(3),Cd的第β(i,j)个对角线元素
β(i,j)=(i-1)(M+N)-0.5i(i-1)+j-i
(15)

4 仿真实验与结果分析
在MATLAB 7.0上对本文提出的WLS-MDS算法进行仿真实验,并将实验结果与MDS以及文献[4]提出的线性最小二乘(linear least square,LLS)定位算法进行对比。本文以所有未知节点定位误差的平均值作为衡量定位精度的标准
式中xr为未知节点的真实坐标;xe为未知节点坐标的估计值。
图1为某一次执行WLS-MDS算法的定位结果。
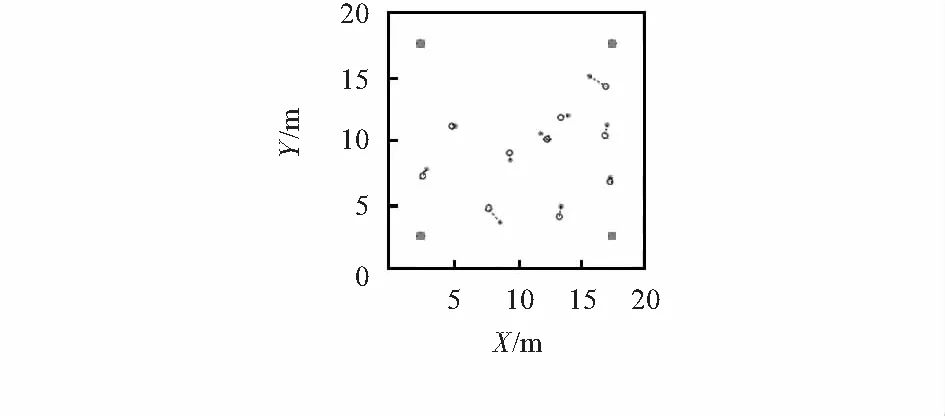
图1 WLS-MDS算法的定位结果
如上图所示,无线网络由4个锚节点与10个未知节点组成,锚节点分别固定在坐标值为(2.5,2.5)m,(2.5,17.5)m,(17.5,2.5)m,(17.5,17.5)m的位置上,未知节点则随机分布在20 m×20 m的矩形区域内。星号表示未知节点的真实位置,圆圈表示WLS-MDS定位算法的计算结果,虚线长度表示该点的定位误差。实验中,取参数为P0=-20 dBm,np=2.5,σ3=4。经计算实验定位误差Error=0.753 0 m。
在参数配置、节点数量及布局与前文一致的情况下,进行2 000次独立重复实验,实验结果统计如图2、图3。
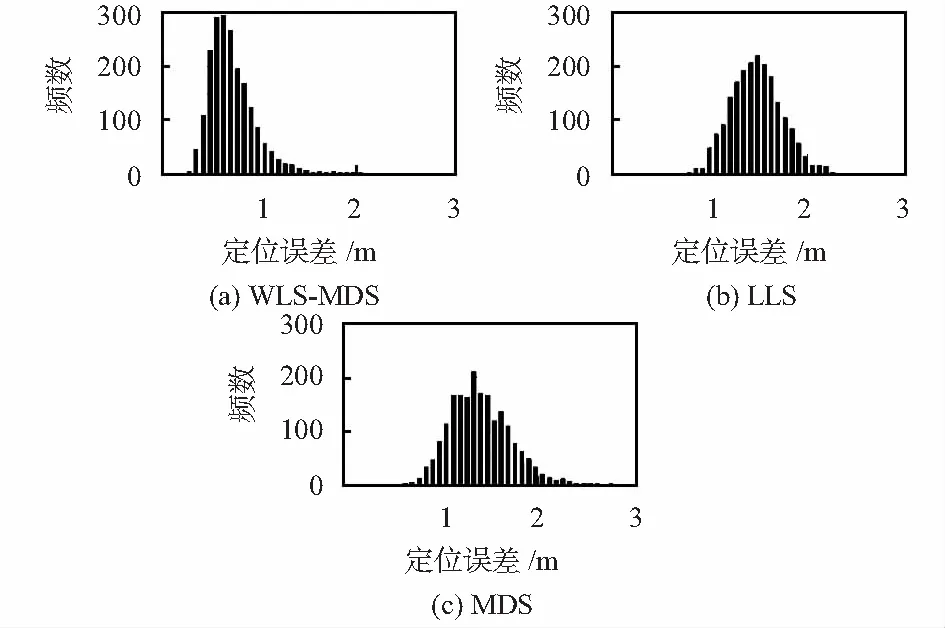
图2 3种算法定位误差频数分布直方图
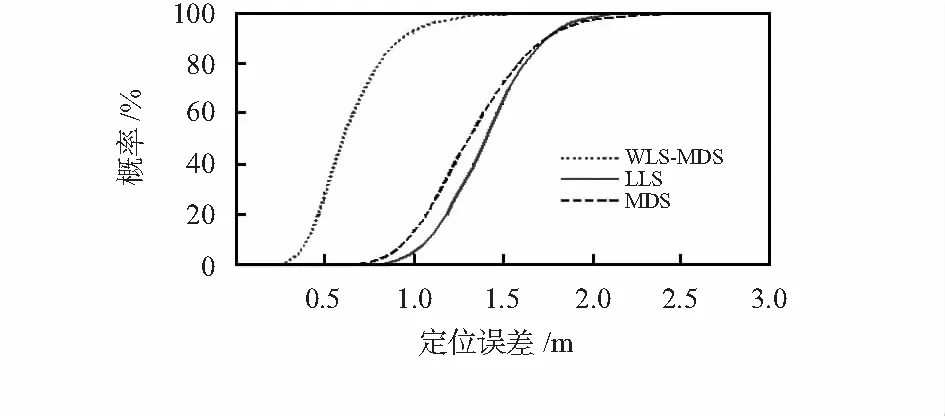
图3 3种算法概率累计曲线
图2为WLS-MDS,LLS,CMDS 3种算法定位误差的频数分布直方图,图3为3者误差的概率累计曲线。在本次实验设置的条件下,WLS-MDS有90 %以上的概率达到Error≤1 m的定位精度,相比另外2种算法和具有显著的优势。
研究环境噪声方差σ2和未知节点数量N对WLS-MDS定位精度的影响,以下实验数据均为独立重复地进行500次仿真实验所得结果的平均值。
1)取参数P0=-20 dBm,np=2.5,σ2=4,锚节点的位置如图1所示,未知节点数目N从1递增至20,3种算法的平均定位误差对比如图4。
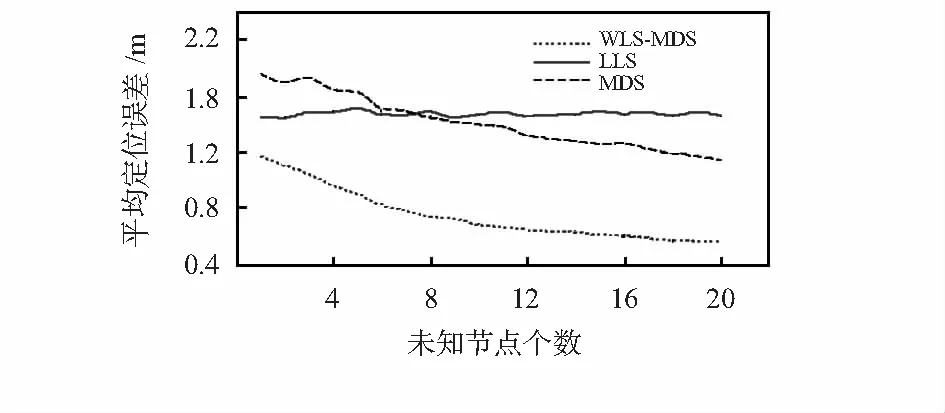
图4 定位误差随N的变化关系
由图4可知,协作式定位算法MDS与WLS-MDS的定位误差会随着网络中节点数量的增加而逐渐减小。而LLS定位算法,作为一种非协作式定位算法,仅仅依靠未知节点与每个锚节点间的测距信息计算节点坐标,其定位精度并不会随着未知节点数量的增加而有所改善。在网络中未知节点数目不同的情况下,本文提出的WLS-MDS定位算法,其定位精度均优于另外2种算法。
2)取参数P0=-20 dBm,nP=2.5,网络中节点分布如图1所示,在噪声方差σ2不同的环境下,对3种算法进行仿真,其结果如图5所示。
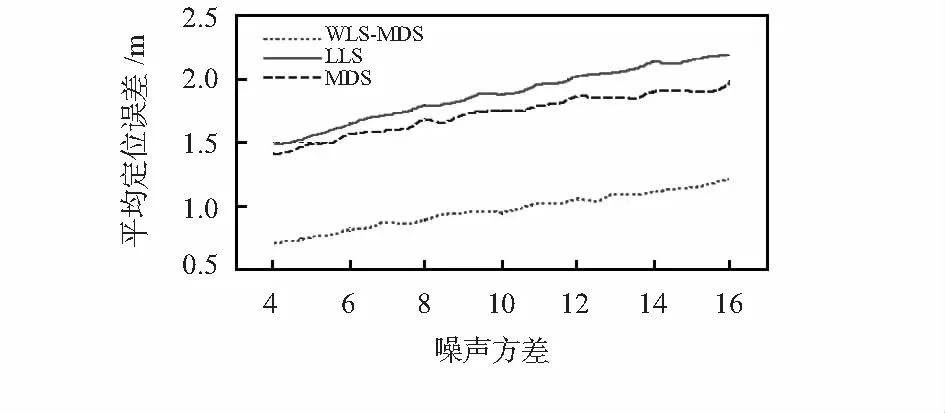
图5 定位误差随σ2的变化关系
随着噪声强度的增加,三者的定位精度均有不同程度的恶化。在不同强度的环境噪声干扰下,WLS-MDS的定位误差均小于其他2种算法。可见,即使在噪声干扰较为严重的环境下,WLS-MDS依然能够达到十分理想的定位精度。
5 结 论
本文提出基于RSS的WLS-MDS定位算法,在已知环境噪声的情况下,利用d2的无偏估计构造距离矩阵,进而计算出未知节点坐标的加权LSE。其本身是一种协作式定位算法,更加适合应用于锚节点数量有限、未知节点数量庞大的WSNs。而且由于该算法结合了WLS与MDS的优点,在定位精度上,较传统的协作式定位算法也具有明显的优势。
