基于粒子群优化的RSSI等弧三边定位算法*
2018-08-03刘旭明郭志慧
刘旭明, 王 伟, 景 强, 郭志慧
(中北大学 信息与通信工程学院,山西 太原 030051)
0 引 言
室内定位对精度有更严格的要求,相比于室外定位,室内定位的可靠性、连续性和稳定性较差[1,2],室外定位系统在室内定位中存在精度不够、信号不稳定等问题,不能实现从室内到室外定位的无缝对接[3]。室内定位技术基于无线传感器网络(wireless sensor networks,WSNs)的节点定位方法按测距与非测距主要有2类:基于测距的定位算法和基于非测距的定位算法。前者通过接收信号强度指示(received signal strength indication,RSSI)、到达时间(time of arrival,TOA)、到达时间差(time difference of arrival,TDOA)或到达角(angle of arrival,AOA)[4]等测度方式获得节点间的相对位置关系(如距离、角度),然后根据三边测量[5]、三角测量[6]、最大似然估计法或粒子群算法[7]等定位算法计算盲节点位置。
本文首先基于对数损耗模型的距离与RSSI关系进行分析,得出不同距离范围与RSSI的相对应关系,提出等弧三边形的定位算法。在相同的实验环境下,分别采用方形布局[8]、等边三角形布局[9]、改进的三角形布局[10]与本文定位效果进行对比,验证提出算法的优越性。
1 RSSI与距离的关系
在实际中,由于多径效应等因素的影响通常采用对数损耗传播模型评估距离和RSSI的关系
(1)
式中d0为近地参考距离;Pr(d0)为近地参考距离的路径损耗值;d为实际距离;Pr(d)为实际距离d的精确路径损耗;n为路径损耗因子,随环境的改变而变化;X为随机噪声,忽略不计。通常d0为1 m,Pr(d0)通过测量可得,记为A;i为不同位置的标记值。则不同位置处距离di与RSSIi的关系为
RSSIi=A-10nlgdi,i=1,2,3,…
(2)

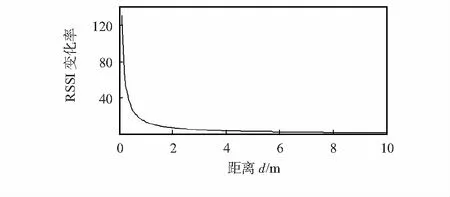
图2 RSSI变化率与距离的关系
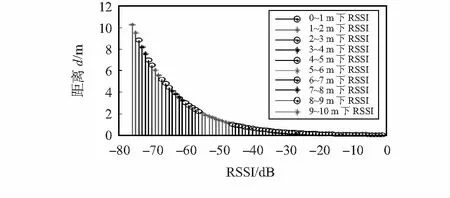
图3 RSSI与距离关系

2 等弧三边形定位算法
2.1 等弧三边模型


图4 等弧三边形节点布署示意
图4中在等弧三边形ABC所围成的区域中,有部分区域也在等弧三边形ACD所围成的区域中。位于重叠区域的待测点,能在2种组合中选择最优的一组进行定位,防止由于干扰等原因出现异常,从而这种选择性对定位精度的提升起到辅助作用。
2.2 等弧三边形布局控制RSSI异常值
与传统三角形定位布局不同,本文以所选取的通信距离r为界,通过对数衰减模型对基站选出的3个最优RSSI值进行计算。如果得到的距离大于通信距离r,判定当前值为异常值,基站重新选出3个最优RSSI值进行计算,最大采集次数为3次。如果采集3次后仍有超越距离r的值,则定位系统将当前异常值重新赋值为r,本文r为4 m。
2.3 等弧三边形定位算法
结合标准粒子群算法和等弧三边形布局,本文定位算法步骤如下:
1)初始化信标节点网络模型。
2)未知节点周期性发送自身信息。
3)各信标节点在收到信息后,记录同一个未知节点的RSSI测量值,并将其值记录到对应的RSSI数组中。
4)各信标节点运用卡尔曼滤波处理RSSI值。
5)各节点将步骤(4)中得到的RSSI值传送到基站,由基站将各节点的RSSI值进行排序,取其最大的3个值,并转换为距离,分别为d1,d2,d3。
6)判断d1,d2,d3是否大于r:是,重新取值,累计3次仍大于r,则按r(r=4 m)计;否则,按原值计算。(方形布局模型没有此步骤)
7)利用标准粒子群优化定位算法,迭代10轮,每轮搜索100次,计算待测点位置(x,y)。
3 实验分析
3.1 实验布局
在实验室一个8 m×8 m的区域内,分别按照方形布局、传统三角形布局、改进三角形布局和等弧三边形布局部署信标节点,如图5中所示。倒三角代表信标节点,“×”代表待测节点。10个待测节点坐标分别为(1,1),(2,2),(3,3),(4,4),(5,5),(4,7),(1,4),(7,4),(2,7),(6,7)。选取最佳通信距离为4 m。
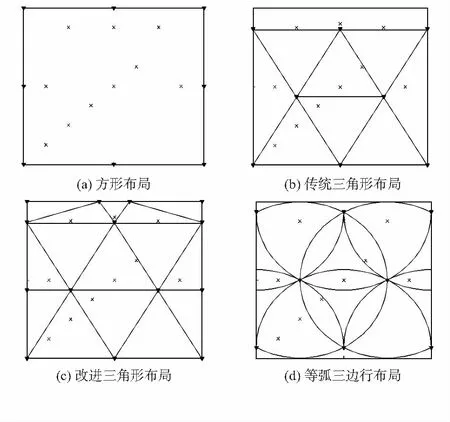
图5 4种布局的节点分布
3.2 结果分析
通过对比4种布局类型,易知图5(a)中方形布局未涉及任何细化的区域模型;图5(b)中传统三角形布局面积覆盖率为65 %,即42 m2;图5(c)中改进三角形布局虽然能够全覆盖,但增加了6个节点;图5(d)中等弧三边形布局面积覆盖率为88 %,即56 m2,相比图5(b)和图5(c)中布局模型,等弧三边形布局的单位节点面积覆盖率更高。
对4种定位布局的数据处理后,得到4种定位布局的误差对比,如表1所示,可知,等弧三边形布局较方形布局、传统三角形布局和改进三角形布局的平均定位精度,分别提高了81 %,54 %和48 %。

表1 4种布局最大、最小和平均误差对比 m
得出如下结论:
1)4种定位布局中,等弧三边形具有最好的定位精度,传统三角形和改进三角形布局次之,方形布局最差。
2)改进三角形布局和传统三角形布局在前5个点的测试中,定位精度差别不大;在后5个点中,改进三角形布局较传统三角形布局有所提高,其主要原因是多增加了几个节点。比较2种布局的10个待测点,改进三角形布局较传统三角形布局,平均定位精度提高了12 %。
4 结束语
通过对RSSI与距离的关系分析,得到距离越远RSSI越不稳定,基于对数衰落模型的距离容错率越来越低,测距误差越来越大。为了利用测距精度较高的信号,提出了等弧三边形定位算法。该算法相对传统方形布局、传统三角形布局和改进三角形布局有更优的定位效果。本文算法不仅能有效提高定位精度,而且能合理控制节点成本,适合大范围推广。
