一类机器喙的运动控制及应用*
2018-08-03王兴波
田 英,王兴波
(佛山科学技术学院机电工程学院,广东佛山 528000)
随着机器自动化程度的提高,可数字控制简单机构的作用越来越重要。比如,机器人中的许多关节,都是可数字控制的简单机构[1-2]。事实上,机械系统的各种运动机构都是由简单运动的部件经巧妙组合后形成复杂运动或者灵巧运动的。机械设计与计算的经验表明,简单机械机构的运动关系分析往往蕴含着非常巧妙而深刻的数学关系,这是因为绝大多数巧妙机构的设计都带有天才的创造[3]。因此如文献[4]、[5]、[6]综述的那样,对机构的运动关系及其研究方法的研究一直是机械设计领域的课题。事实上,如果不能正确解析机构的运动关系,无论是在设计还是在机电控制方面,都是无法达到预期效果的。文献[7]、[8]均对此做出专门论述。总而言之,机构运动的数学解析关系对于机构的运动控制是至关重要的。
本文所介绍的内容,正是有关一个简单机构运动关系的分析与控制问题。这是笔者在设计一个食品包装机械时设计出的一个可数字控制的简单机构。该机构如图1所示,由几个杆件链接,形状婉如一个鸟喙,因此笔者称之为机器喙,用于食品包装机器上自动开启软包装的袋口。该机构采用一个伺服电机连接丝杠控制其运动。显然,喙的张合角是控制所需的关键参数。由于电机连接在平动推杆上,问题体现在建立推杆与机器喙张合角的解析关系。该问题看似简单,实际上颇费周折。经过认真分析、演绎,笔者解决了它。本文给出相关的结果、演绎过程及该机构的应用示例。
1 装置的机械结构原型
可于壶嘴袋安装壶嘴装置的主体如图1所示。这是一个由一组杆件连接而成的简单装置,形状婉如一个鸟喙,因此笔者称之为机器喙。它采用一个伺服电机连接丝杠(后文称推杆)控制其运动。当电机带动丝杠转动时,可使喙张合。张开时可打开袋口便于壶嘴放入。将壶嘴置入袋口的技术的设计已经申请了专利,限于本文的主题,这里不宜详述。读者可在专利公告材料中了解。

图1 机械喙工程设计原型图Fig.1 Engineering Prototype of Machinery Beak
2 控制装置的参数分析
显然,喙的张合角是控制所需的关键参数。由于电机连接在平动推杆上,问题体现在建立推杆与机器喙张合角的解析关系。具体需要确定:(1)推杆平动的两个极限位置;(2)推杆平动与喙张合角的关系。为此以下通过喙的运动分析分别解决这两个问题。
2.1 机器喙的运动分析
为便于分析,将图1简化为图2。

图2 机器喙简化图Fig.2 Simplified Drawing of Machinery Beak
从图2可以看出,A、A1是两个固定铰链,B、B1,C、C1是活动铰链,BAD、B1A1D是两个近似L型的对称刚性杆件,OO1与CC1形成一个T字形的固定推杆,可沿水平方向往复运动;BC、B1C1是两个“可自由运动的刚性杆件”。根据机械设计原理,当OO1推动CC1向右运动时,AD、A1D会张开;当OO1推动CC1向左运动时,AD、A1D会闭合。当AD、A1D张开到“最大”时,CC1无法继续向右推进的临界位置是右止行点。当AD、A1D合到极限位置时,CC1无法继续向左推进的临界位置是左止行点。
2.2 止行点的分析
从机械控制的要求来看,两个止行点就是推杆平动的两个极限位置,是控制AD、A1D的张合运动的两个边界条件。鉴于“AD、A1D张开到最大”的问题要求仅仅是一个模糊概念,问题只能结合杆件已知的运动及其约束关系来求解。图3给出了几个杆件之间的运动约束关系型。可以看出(考虑机构的对称性,仅考虑上半部分):
(1)C点只能在水平线CC2上运动;
(2)B点可绕A点转动,其转动半径为AB的长度;
(3)B点同时可绕C点转动,其转动半径为BC的长度;

图3 机械喙各节点的运动及其约束关系Fig.3 Motion Relationship And Constraints of Machinery Beak
由此可知,B点是一个受双面约束的动点。也正是这种约束才导致左止行点和右止行点的存在。根据轨迹生成原理,B点绕C点转动连同C点的平动形成了一簇以CC2上诸点为圆心、BC为半径的包络圆簇;B点绕A点转动形成了一个以A为圆心、AB为半径的圆周(下简称圆A)。由此可知,包络圆簇中自左向右第一个与圆A相切圆的圆(简称右切圆)之圆心位置即为右止行点的位置。因为此时杆AB与BC已经处在一条直线上。因为AB与BC都是刚性杆无变形发生,推杆OO1已经无法继续推动C向右运动。同理,包络圆簇中自右向左第一个与圆A相切圆的圆心即为左止行点的位置。由此不难得到计算左右止行点的方法如下:
第一步:过C点作水平线L;
第二步:以A为圆心,杆长AB+BC为半径画圆交L于 C1、C2;
第三步:C1、C2即为所求左右止行点。
2.3 止行点的计算
前小节基于轨迹法确定了左右止行点的理论位置。但是这个结果是无法直接应用于计算机控制系统的。计算机控制系统控制开合机构运动时,需要精确的解析公式。为此本小节给出问题的解析解。
如图1所示,系统已知的参数除了杆AB、BC、AD的长度外,还有2个隐含的已知参数,那就是AA1的间距以及CC1的长度。将这些参数重新整理后即可得到左右止行点距垂直线AA1的距离X为:

公式(1)计算出来的结果适合于左右最大止行点。但是这个公式不适合于控制“即时张合运动”,即在最大与最小张合角度之间的任意张合角度的运动。
2.4 推杆水平位移与张合角的解析关系
考虑机构张合一个α角度的情况。图4给出了杆件运动的简化图,图中B1是B经过转动α角后的位置,C1是C经过水平移动S位移后的位置。即BAB1=a,CC1=S,设AB的初始位置与垂直方向的角度为φ并设A到水平线L的距离为h。以下主要推导S与α的关系。
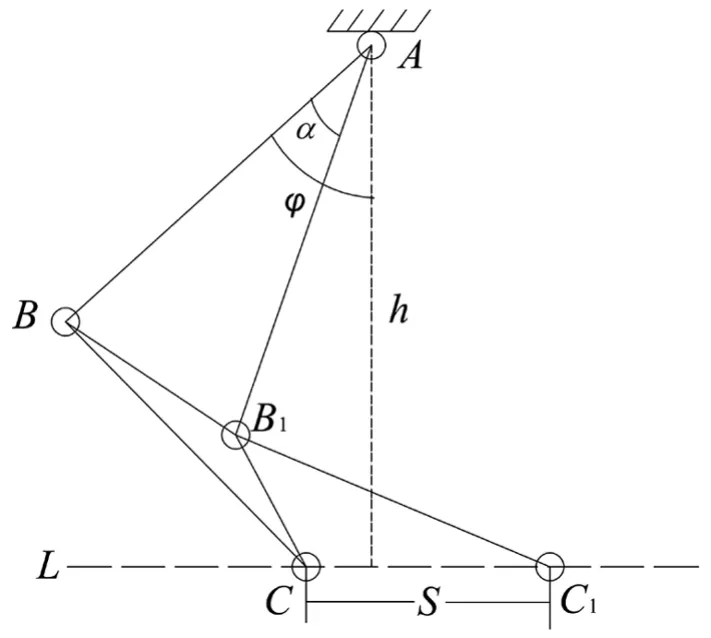
图4 杆件运动的简化图Fig.4 Simplified Drawing of Rods’Motions
在△BB1C中,由余弦定理得:

同理在△B1C1C中:

即:

令BC=B1C1=l,整理上述三式得,

以下计算α、BB1、∠B1C1C以及∠B1BC。
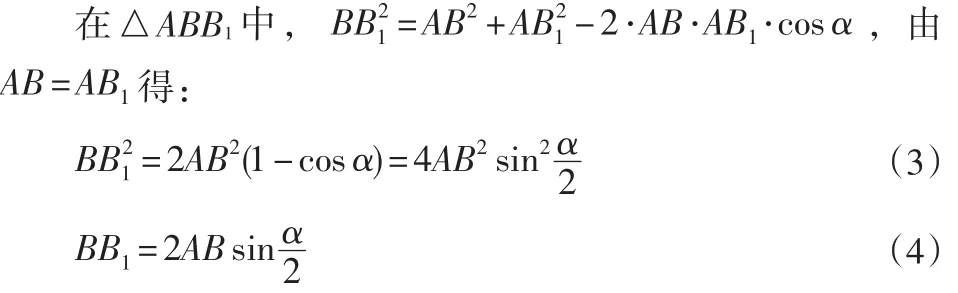
为了计算∠B1BC,这里分别过B、B1作水平线交h垂直线于G、I;分别过B、B1作垂直线交C1C延长线(水平线L)于F、H,延长AB线交C1C延长线(水平线L)于E。限于图中布局,这里略去具体画线。由此得:


同理可求得,

将(3)~(7)式代入(2)式,又因为 BC=l,AB=AB1,可得:

由于φ、h以及AB、l均可通过机械设计事先给定,即a1,a2,a3,a4均为常量,因此上式(9)决定了α与S的关系。
3 计算与控制
基于节的运动关系与控制参数,本小节给出S-α曲线的计算过程及基于S-α关系的机械喙控制流程。
3.1 S-a曲线的计算过程
式(9)是一个包含复合函数计算的关系式,不太适应人工计算。采用计算机计算得到列表曲线的方式比较适合工程设计的现实。图5是笔者以初始角φ=50°、α最大为90°、AB=35 mm、l=20 mm、h=40 mm为参数,利用Microsoft Excel计算出的推杆位移S与喙张合角α之间的列表曲线即S-α曲线。
可以看出,位移S从0开始增加时,张合角α逐渐增加,α在接近90°时增速减小。这与实际情况是一致的。
为便于读者利用(9)编程,以下给出以目标角求位移的C语言伪代码的计算过程。
初始化:输入初始参数杆长AB、BC、AA1、CC1;
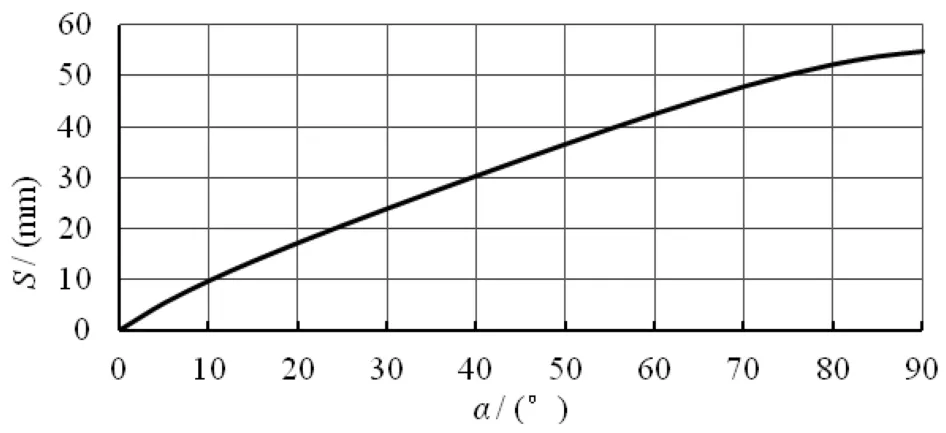
图5 S-α曲线Fig.5 S-αCurve

3.2 基于S-α关系的控制流程
式(9)的意义更在于它可以作为计算机控制机器喙的运动关系。图6给出了相应的控制流程。限于篇幅,这里不作具体说明。

图6 机器喙的运动控制过程Fig.6 Control Process for Machinery Beak
4 应用举例及结论
4.1 应用案例
图7给出了利用机械喙打开食品包装袋的示意图。首先在落料筒的筒壁上开一小孔,将机械喙的整体置于落料筒之中使喙端部对准小孔中心。则当机械喙在平移张合时能够打开软包装袋口而置于壶嘴。鉴于细节涉及到企业的设计数据,这里不赘述。
此外,该机器喙在自动医疗机械和仿生机械设计上也可以有很广泛的应用。比如,外科手术时可协助医生打开创口等。限于篇幅,这里不再赘述。

图7 机械喙用于打开软包装袋口Fig.7 Machinery Beak Used to Open Mouth of Soft Bags
4.2 结论
采用简单的杆件结构设计出功能独特的机构是机械设计的基本原则。本文采用杆件设计的机械喙集机械与计算机控制与一体,是典型的机电系统。装置在食品包装业的成功应用,可为类似的设计提供了有益的借鉴。笔者希望本文能够抛砖引玉,带来更多同行的研究。
