一种基于机器视觉的机械手定位装置的设计*
2018-08-03杨振宇桂祖平黄生富
杨振宇,桂祖平,黄生富
(1.中山职业技术学院,广东中山 528400;2.珠海华冠电子科技有限公司,广东珠海 519000)
0 引言
随着“机器视觉”技术和“高速机械手”技术的发展,快速定位与抓取的视觉机械手已经成为当前自动化控制系统中重要的前沿技术,并越来越多地应用在集成电路装配、精密仪器装配、工件高速定位等生产领域,视觉定位是机器人视觉最适合的任务之一[1],机器视觉技术和高速机械手控制技术的结合,对提高生产效率、提高重复精度,提高自动化水平,推进企业转型升级具有重要意义。
1 视觉机械手的工艺流程
在电路板器件安装生产领域,经常需要对贴片类器件进行高速定位与快速安装,例如PCB板上的芯片安装、柔性电路板上的补强片的安装、微机电装置的器件安装等,工业应用中常用带有真空吸附头的多自由度机械手[2]来实现将贴片类的器件进行快速拾取与准确定位。在这种小微型贴片类器件的贴片系统[3]中,贴片的精确定位都需要通过视觉相机对机械手快速吸取后的位置姿态进行检测,并按照检测到的位置偏差,对贴片类器件进行位置角度校正,以保证安装时的准确定位。如图1所示为贴片类器件的快速定位视觉机械手的工艺流程。
2 视觉机械手机械结构设计
视觉机械手基于视觉和伺服控制的高精度运动控制系统[4],改进了传统的机械手的抓取缺点,能够准确、快速地拾取和定位贴片类器件。本文所提出的高精度的视觉机械手用于从来料传送线或来料工作台上吸取贴片类器件,在视觉相机2对贴片器件的机械手拾取位置姿态进行检测后,对贴片类器件进行角度校正,如图2所示为视觉机械手。

图1 视觉机械手快速安装贴片类器件的工艺流程
视觉机械手的机械结构自上而下分别包括:Z轴角度校正伺服电机、机械手臂旋转轴的轴承座,轴承座装配有视觉相机1,用于检测贴片类器件目标安装板的定位位置,机械手臂旋转轴的下端安装有上下伸缩气缸,以及伸缩气缸末端的吸头,如图2所示为视觉机械手的机械结构。
视觉机械手安装在一个横向布置的龙门型X轴向丝杠滑台上,视觉机械手的横向移动由安装在丝杠滑台一侧的伺服电机驱动,以实现贴片类器件的X方向上的精确定位。为提高视觉机械手的工作效率,伸缩气缸下端设计有两个贴片器件的拾取吸头,视觉机械手一次可以拾取和定位安装两块贴片类器件。

图2 视觉机械手的机械结构
3 机械手定位装置的整体机械结构设计
基于机器视觉的机械手定位装置包括机架、底座、设置于底座上的工作台,工作台的一侧是贴片类器件的来料传送装置,工作台的另一侧是贴片类器件的目标安装台,目标安装工作台上固定有贴片器件的目标安装板,如PCB板或柔性电路板,由于目标安装板上需要安装多个贴片类器件,因此固定了目标安装板的工作台具有前后进给装置,如上所说的基于机器视觉的机械手定位装置的机械整体结构,如图3、图4所示。
视觉机械手安装在一个横向布置的龙门型X轴向丝杠滑台上,视觉机械手的横向移动由安装在丝杠滑台一侧的伺服电机驱动,以实现贴片类器件的X方向上的精确定位。为提高视觉机械手的工作效率,伸缩气缸下端设计有两个贴片器件的拾取吸头,视觉机械手一次可以拾取和定位安装两块贴片类器件,如图4所示。
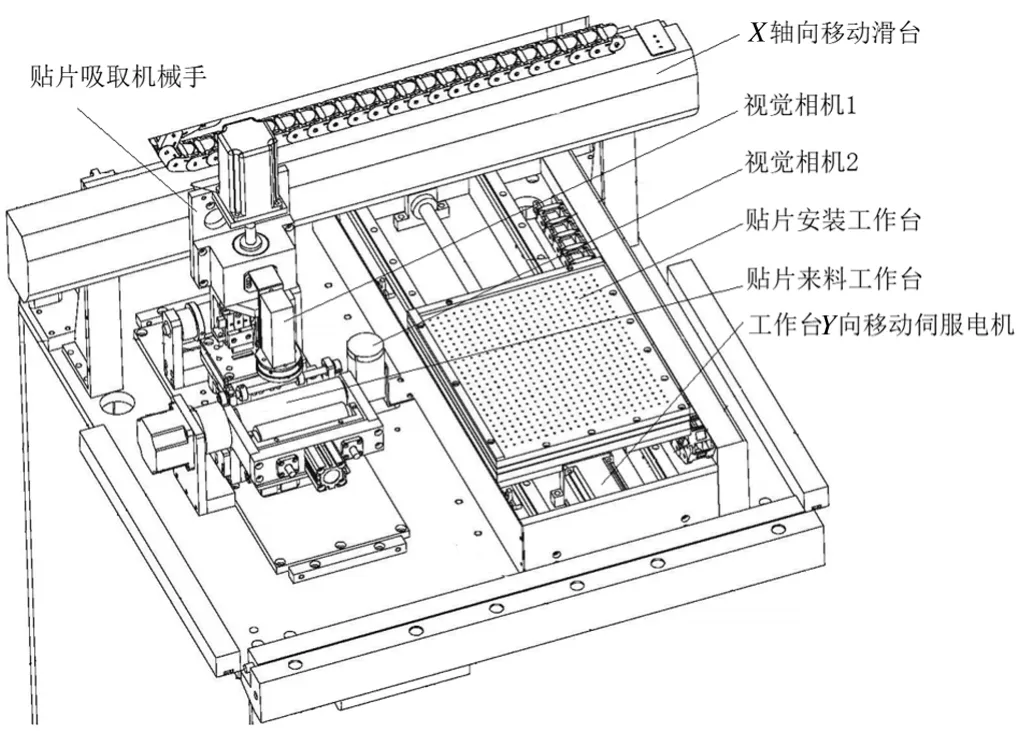
图3 机械手定位装置整体机械结构三维图
由图3和图4所示,视觉机械手的贴装头[5]从贴片来料工作台吸取元件后,移动到视觉相机2的位置,进行贴片姿态位置检测,比较标准正确的姿态,判断贴片器件的拾取位置偏差,视觉系统将检测到的姿态位置数据发送给视觉控制器,经过数据处理后,再通过PLC控制器发送给伺服电机,伺服电机驱动机械手以校正工件的角度姿态偏差。视觉机械手移动至右侧的贴片安装工作台上方,这时贴片安装工作台在工作台Y向移动伺服电机的驱动下,前后移动,以使安装在机械手旋转轴承座上的视觉相机1,进行安装工作台目标安装板的位置标示检测,视觉相机1检测到安装工作台上所固定的目标安装板的前后标示后,确定了安装板的位置,这时,X轴向伺服电机和Y向伺服电机快速移动以确定贴片器件的定位和安装位置,机械手进行安装。
由图3和图4所示,视觉机械手从贴片来料工作台吸取贴片器件后,移动到视觉相机2的位置,进行贴片姿态位置检测,比较标准正确的姿态,判断贴片器件的拾取位置偏差,视觉系统将检测到的姿态位置数据发送给视觉控制器,经过数据处理后,再通过PLC控制器发送给伺服电机,伺服电机驱动机械手以校正工件的角度姿态偏差。视觉机械手移动至右侧的贴片安装工作台上方,这时贴片安装工作台在工作台Y向移动伺服电机的驱动下,前后移动,以使安装在机械手旋转轴承座上的视觉相机1,进行安装工作台目标安装板的位置标示检测,视觉相机1检测到安装工作台上所固定的目标安装板的前后标示后,确定了安装板的位置,这时,X轴向伺服电机和Y向伺服电机快速移动以确定贴片器件的定位和安装位置,机械手进行安装。

图4 机械手定位装置的整体机械结构侧视图
4 结束语
近年来,基于视觉的机械手控制——视觉伺服,已逐渐发展成为机器人领域最活跃的研究方向之一[6],本文所阐述的贴片类机械手定位装置,将精密机械与视觉系统有机结合[7-8],具有X-Y-Z三个轴向的自由度,同时具有两个视觉相机,分别对贴片类器件的位置姿态,和安装目标板的位置进行检测,机械手的下端安装有两个贴片器件拾取头,大大提高了贴片器件的定位工作效率,这种具有一定柔性的,基于机器视觉的快速抓取、校正、定位的伺服机械手控制系统,可以广泛地使用在集成电路装配、精密仪器装配、微型工件高速定位行业领域,具有较高的应用价值。
